Capitolo 3 - Progettazione di un’interfaccia
SPI per bus AMBA APB
La figura 3.1 mostra il flusso di progetto seguito.
Le specifiche imponevano di realizzare un’interfaccia SPI, il cui comportamento è descritto nel capitolo 1 e il cui standard è definito in [2], per bus AMBA APB, il cui comportamento è descritto nel capitolo 1 e il cui standard è definito in [1]. L’intera struttura è stata divisa in sottoblocchi più semplici che sono stati descritti in linguaggio VHDL; ogni blocco è stato sottoposto a test per verificarne la corretta funzionalità. In seguito è stato effettuato l’assemblaggio e sono stati eseguiti vari test funzionali sull’intera interfaccia per verificarne la completa compatibilità con gli standard; per la descrizione dei test si rimanda al capitolo 4. Tali test sono stati effettuati successivamente anche per verificare la corretta sintesi e la corretta mappatura su FPGA. Lavorando poi sui parametri di sintesi e di layout si è cercato di ottimizzare le prestazioni in termini di occupazione e velocità, per una stima di tali prestazioni ed un confronto con quelle di interfacce commerciali dello stesso tipo si rimanda al capitolo 4.
3.2 Struttura dell’interfaccia SPI – APB
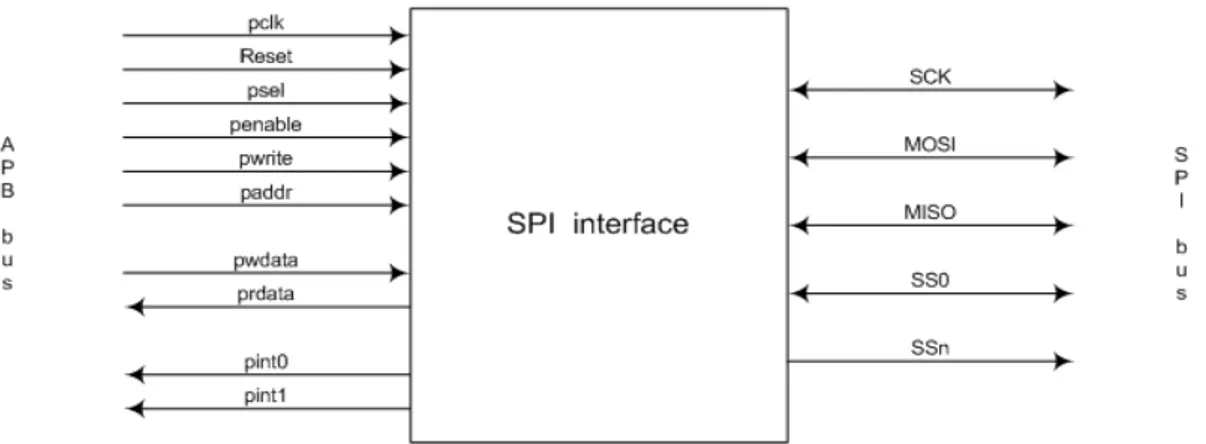
L’interfaccia progettata comunica da un lato con un bus SPI, sia come master che come slave, dall’altro con un bus AMBA APB come slave, secondo gli standard sopra citati. Come master SPI è in grado di pilotare più slave mediante le linee SSn.
Essa è costituita dai seguenti blocchi:
• L’interfaccia APB vera e propria, divisa in due sottoblocchi che controllano scrittura e lettura sui registri interni.
• Una serie di registri di configurazione, dati e controllo.
• Il core vero e proprio costituito da due macchine a stati finiti per il controllo della trasmissione SPI master e di quella slave.
• Un registro di shift parallelo-seriale, seriale-parallelo. • La logica per il controllo dei pin SPI.
• La logica di controllo del clock e del reset dell’intera interfaccia.
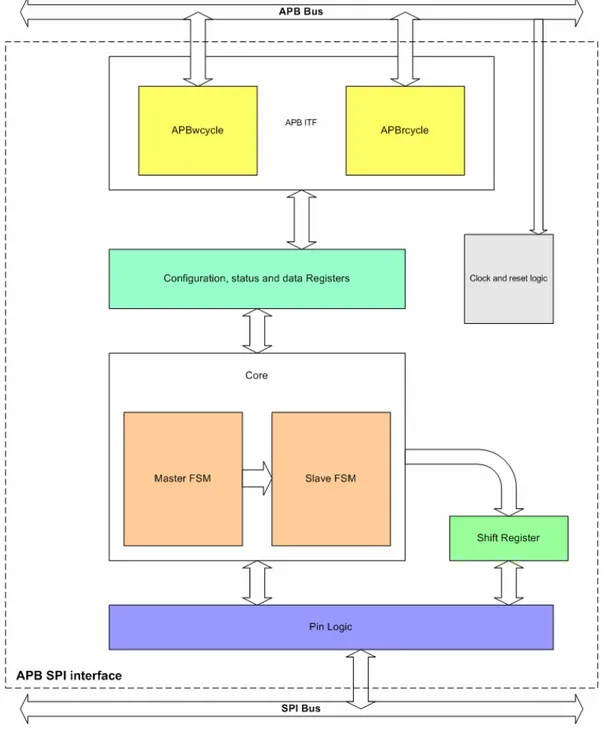
I blocchi sono progettati in modo che se si desidera implementare un’interfaccia che operi unicamente come slave si possono non sintetizzare alcune parti variando unicamente il top del progetto e risparmiando in termini di area occupata.
Fig 3.3 Schema a blocchi dell’interfaccia SPI-APB
3.3 Interfaccia AMBA APB
L’interfaccia APB è costituita da due blocchi APBrcycle e APBwcycle che controllano rispettivamente lettura e scrittura del bus APB accedendo direttamente ai registri dell’interfaccia.
3.3.1 Lettura dal bus APB
Il blocco che gestisce la lettura dai registri interni dell’interfaccia multiplexa i vari segnali provenienti da essi a seconda degli indirizzi e dei segnali di controllo APB.
Fig 3.4 Ingressi e uscite del blocco APBrcycle
Segnale Direzione Descrizione
Psel, penable, pwrite IN Segnali di abilitazione e controllo del bus APB
Paddr IN Costituito da tre bit rappresenta l’indirizzo interno del registro a cui si vuole accedere
fromSPIXX IN Costituito da sei vettori da 8 bit, ciascuno proveniente dal registro interno corrispondente
Prdata OUT Costituito da 8 bit rappresenta il dato letto dal bus APB
3.3.2 Scrittura sul bus APB
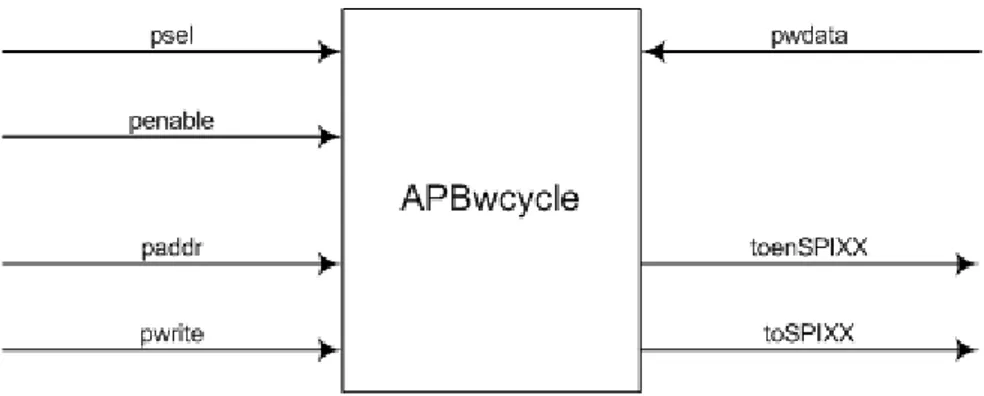
Il blocco che gestisce la scrittura sui registri interni dell’interfaccia non fa che abilitare la scrittura sugli stessi attraverso i segnali toenSPIXX a seconda degli indirizzi e dei segnali di controllo APB.
Fig 3.5 Ingressi e uscite del blocco APBwcycle
Segnale Direzione Descrizione
psel,penable, pwrite IN Segnali di abilitazione e controllo del bus APB Paddr IN Costituito da tre bit rappresenta l’indirizzo
interno del registro a cui si vuole accedere pwdata IN Costituito da 8 bit rappresenta il dato scritto sul
bus APB
toSPIXX OUT Costituito da sei vettori da 8 bit, ciascuno diretto all’ingresso del registro interno corrispondente
toenSPIXX OUT Sei bit ciascuno diretto all’enable del registro interno corrispondente
3.4 Registri interni di configurazione, dati e controllo
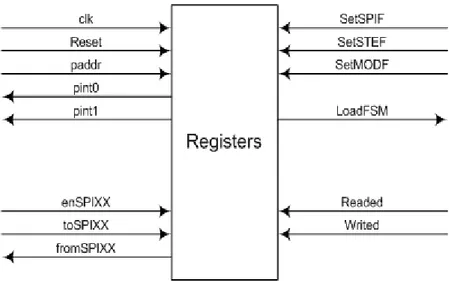
Il blocco registers contiene i vari registri interni dell’interfaccia che ricalcano quasi completamente quelli descritti nello standard SPI, ad eccezione del registro SPISS, aggiunto per rendere possibile il controllo di più slave SPI contemporaneamente, e di alcuni bit di controllo per la modalità bidirezionale mancanti, dato che tale modalità non è supportata. Tale blocco provvede anche alla gestione dei piedini di interruzione verso il bus AMBA APB e all’aggiornamento dei flag secondo lo standard SPI.
Segnale Direzione Descrizione
Paddr IN Costituito da tre bit rappresenta l’indirizzo interno del registro a cui si vuole accedere
fromSPIXX OUT Costituito da sei vettori da 8 bit, ciascuno proveniente dal registro interno corrispondente
toSPIXX IN Costituito da sei vettori da 8 bit, ciascuno diretto all’ingresso del registro interno corrispondente
enSPIXX IN Sei bit ciascuno diretto all’enable del registro interno corrispondente
pint0, pint1 OUT Piedini di interruzione rispettivamente di buffer dati ricevuti pieno o di errore di mode fault e di buffer di trasmissione vuoto
SetSPIF, SetSPTEF, SetMODF
IN Segnali provenienti dal core per il set dei rispettivi flag
LoadFSM OUT Segnala al core un'avvenuta scrittura nel registro dati
Writed, readed IN Segnali provenienti dall’interfaccia APB indicano una avvenuta scrittura o lettura sui registri interni. Sono usati assieme a paddr per il clear dei flag
La mappa dei registri interni così come la loro funzione ricalca quella indicata nello standard SPI, con alcune eccezioni:
SPICR2 : SPI control register 2
Bit 7 6 5 4 3 2 1 0
R 0 0 0 0 0 0
W no no no MODFEN no no SPISWAI no
La funzione dei singoli bit è quella indicata nello standard ma mancano i campi BIDIROE e SPC0 relativi alla modalità bidirezionale che non è non supportata. SPISS: SPI slave select register
Bit 7 6 5 4 3 2 1 0
R
W SS7 SS6 SS5 SS4 SS3 SS2 SS1 SS0
In modalità master ciascun bit abilita in uscita la linea di selezione dello slave corrispondente, in tal modo è possibile realizzare bus SPI dove si possono selezionare distinguendo fino a 8 slave. In modalità slave solo la linea 0 è attiva come ingresso.
3.5 Core
Il core è costituito da due macchine a stati finiti, realizzate sul modello di Moore; esse sono contenute nei blocchi slavecore e mastercore e controllano rispettivamente lo scambio dati SPI attraverso lo shift register e la generazione dei segnali SCK e SS per la modalità master. E’ stato preferito l’utilizzo di molti stati ognuno con poche operazioni per ridurre la logica combinatoria e migliorare le prestazioni in termini di velocità.
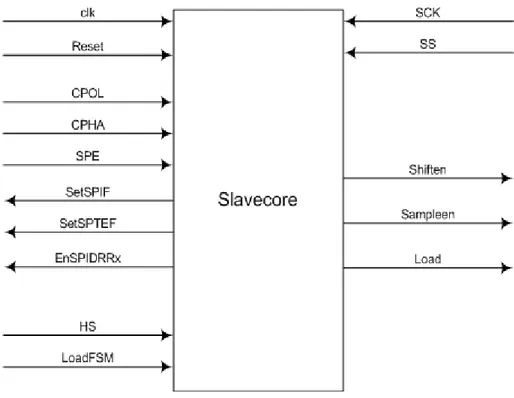
3.5.1 Controllo dello shift register
La macchina a stati finiti che controlla lo shift register riceve in ingresso, oltre ai bit di controllo, il clock SPI di trasmissione SCK e il segnale di selezione slave SS; esso pilota di conseguenza lo shift register caricando parallelamente il dato su di esso, facendolo shiftare serialmente o prelevandolo parallelamente.
Segnale Direzione Descrizione
CPHA, CPOL, SPE IN Bit di controllo del registro di controllo, controllano fase, polarità e stato della trasmissione.
SetSPIF, SetSPTEF OUT Segnali verso il registro di stato per il set dei rispettivi flag
EnSPIDRRx OUT Segnale verso il registro dati per il prelievo del dato parallelo dallo shift register
HS IN Segnale proveniente dal mastercore che indica che sta avvenendo una trasmissione master alla massima velocità
loadFSM IN Segnale di avvenuta scrittura nel registro dati
SCK, SS IN Segnali di sincronismo e selezione provenienti dal master SPI
Shiften, Sampleen, Load
OUT Segnali di controllo dello shift register, rispettivamente: shift, controllo di campionamento ingresso seriale, caricamento parallelo del dato
Stato Descrizione
IDLE La macchina a stati attende un comando di caricamento parallelo del dato nello shif register o l’inizio di una trasmissione SPI LOADING Il dispositivo carica parallelamente il dato dallo SPIDR allo shift
register
SETSPTEF Ha inizio la trasmissione SPI, la macchina setta il flag SPTEF nell’ SPICR1
SHIFT La macchina comanda uno shift allo shift register
SAMPLE La macchina comanda il campionamento del dato seriale allo shift register
AWAITSH Il dispositivo attende di entrare nello stato di shift
AWAITSA Il dispositivo attende di entrare nello stato di sample
UNLOAD Il dato nello shift register viene passato parallelamente al registro SPIDR di ricezione, viene settato il flag SPIF
AWAIT La macchina attende la fine della trasmissione SPI
Tab 3.5 Descrizione degli stati interni del blocco slavecore
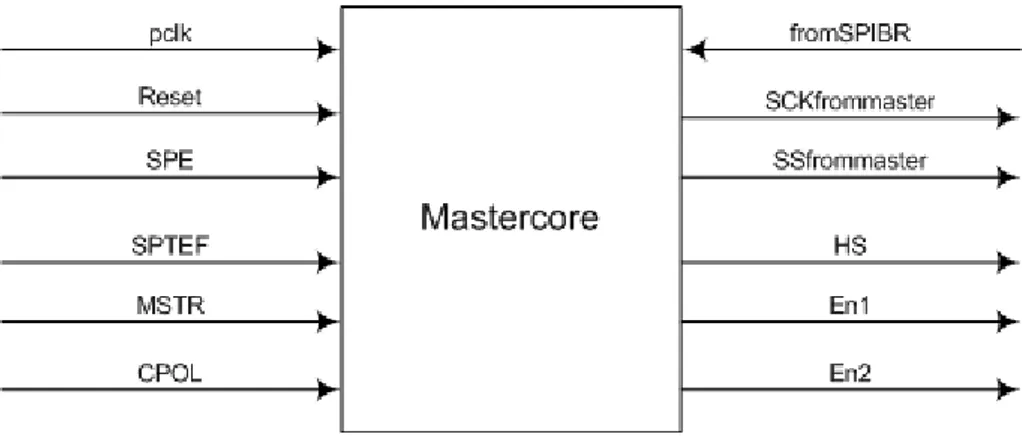
3.5.2 Generazione dei segnali SCK e SS per la modalità master
La macchina a stati finiti che controlla la generazione dei segnali SCK e SS per la modalità master riceve in ingresso oltre ai bit di controllo, i bit indicanti la velocità di trasmissione dal registro di baud rate (SPIBR) e genera di conseguenza i segnali SCK e SS. Per la generazione del segnale SCK il blocco mastercore fa uso di un divisore programmabile di frequenza contenuto nel blocco freq_divider e costituito da un prescaler e da un contatore con flip-flop T in uscita.
Fig 3.8 Ingressi e uscite del blocco mastercore
Segnale Direzione Descrizione
MSTR, CPOL, SPE IN Bit di controllo del registro di controllo, controllano modalità, polarità e stato della trasmissione.
SPTEF IN Flag di buffer di trasmissione vuoto dal registro di stato, indica alla macchina a stati quando far partire una nuova trasmissione master.
fromSPIBR IN Segnale composto da sei bit indicanti la velocità di trasmissione dal registro di baud rate
SCKfrommaster, SSfrommaster
OUT Segnali generati per la trasmissione SPI
En1, En2 OUT Segnali per la sincronizzazione di MOSI con SCK alla logica per il controllo dei pin SPI
HS OUT Segnale che indica allo slavecore che sta
avvenendo una trasmissione master alla massima velocità
Il dispositivo evolve negli stati descritti in tabella 3.7.
Stato Descrizione
IDLE La macchina attende che l’interfaccia sia abilitata come master
WAITTX Il dispositivo attende una scrittura nell’SPIDR per dare inizio alla trasmissione SPI come master
WAITti1,WAITti2 Ha inizio la trasmissione SPI, la macchina attende un idling time minimo nel caso di due trasferimenti consecutivi
WAITtl La macchina attende il leading time minimo (mezzo ciclo di SCK)
TX1,TX2 Il dispositivo si evolve nella trasmissione vera e propria
CNT La macchina incrementta il contatore dei bit trasmessi. Ad otto la trasmissione ha termine
WAITtt La macchina attende il trailing time minimo (mezzo ciclo di SCK) prima di tornare nello stato di IDLE o riiniziare subito una nuova trasmissione
Tab 3.7 Descrizione degli stati interni del blocco mastercore
3.6 Registro di shift parallelo-seriale, seriale-parallelo
Il registro di shift e conversione parallelo-seriale e seriale-parallelo è contenuto nel blocco shift-reg, esso si comporta contemporaneamente da PISO (parallel input - serial output) e da SIPO (serial input - parallel output). Infatti esso carica parallelamente il dato da trasmettere e lo shifta mano a mano sull’uscita seriale; contemporaneamente campiona l’ingresso seriale shiftando il dato all’interno del registro che a fine trasmissione viene passato parallelamente al registro dati.
Fig 3.9 Ingressi e uscite del blocco shiftreg
Segnale Direzione Descrizione
Serialin IN Ingresso dati seriale proveniente dalla logica di controllo dei pin SPI
Serialout OUT Uscita dati seriale verso la logica di controllo dei pin SPI
Parallelin IN Ingresso dati parallelo a 8 bit proveniente dal registro dati
Parallelout OUT Uscita dati parallela a 8 bit verso il registro dati Shiften, Sampleen,
Load
IN Segnali di controllo provenienti dallo slavecore, rispettivamente: shift, controllo di campionamento ingresso seriale, caricamento parallelo del dato
LSBFE IN Bit di controllo dal registro di controllo che indica quale bit va trasmesso per primo se il più o il meno significativo
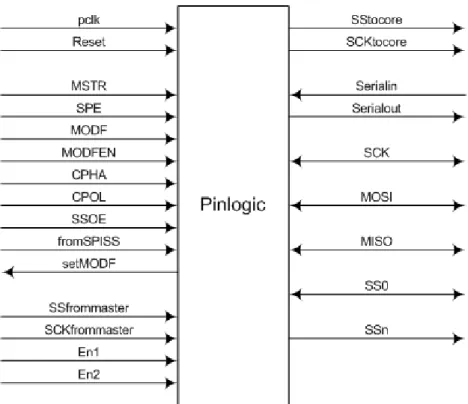
3.7 Logica per il controllo dei pin SPI
La logica per il controllo dei pin SPI, contenuta nel blocco pinlogic, ha il compito di campionare e sincronizzare i dati seriali, di controllare i segnali di abilitazione per le linee bidirezionali e infine multiplexare i segnali SCK e SS a seconda della modalità, master o slave. Inoltre in essa vi è la logica per il controllo dell’errore di mode fault.
Segnale Direzione Descrizione
MSTR, SPE, MODF, MODFEN, CPHA, CPOL, SSOE
IN Bit di controllo provenienti dai registri di controllo
fromSPISS IN Uscita del registro di selezione degli slave per il controllo delle linee SSn
SetMODF OUT Segnale verso il registro di stato per il set del rispettivo flag
SCKfrommaster, SSfrommaster
IN Segnali generati dal mastercore per la trasmissione SPI in modalità master
En1, En2 IN Segnali per la sincronizzazione di MOSI con SCK provenienti dal mastercore
SStocore, SCKtocore OUT Segnali SS e SCK multiplexati a seconda della modalità (master o slave) per il blocco slavecore
Serialin IN Ingresso seriale collegato all’uscita seriale dello shift register per la sincronizzazione Serialout OUT Uscita seriale collegata all’ingresso seriale
dello shift register per la sincronizzazione
SCK, MOSI, MISO, SS0, SSn
INOUT Segnali SPI
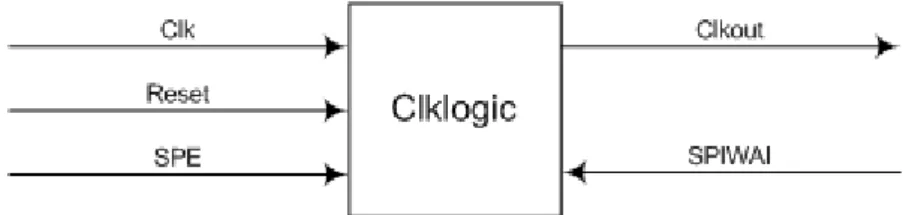
3.8 Logica di controllo del clock e del reset
La logica per il controllo del clock contenuta nel blocco clklogic gestisce la modalità di wait dell’interfaccia disabilitando il clock di alcuni blocchi.
Essa è costituita essenzialmente da una macchina a stati che controlla il segnale di abilitazione del clock. Il cool clock così generato viene inviato a tutti i blocchi tranne che ai registri che servono per riabilitarlo e alla logica per il controllo del reset.
Fig 3.11 Ingressi e uscite del blocco clklogic
Segnale Direzione Descrizione
SPE, SPIWAI IN Bit di controllo del registro di controllo
Clkout OUT Cool clock generato
Tab 3.10 Descrizione degli ingressi e delle uscite del blocco clklogic
Stato Descrizione
RUN Stato di funzionamento normale in cui il cool clock è attivo
OUTDIS Se le uscite SPI vengono disabilitate, tramite il bit SPE nel registro di controllo, la macchina entra in questo stato in cui attende che anche il clock venga disabilitato tramite il bit SPIWAI
STOP La macchina disabilita il cool clock
Tab 3.11 Descrizioni degli stati interni del blocco clklogic
La logica per il controllo del reset non fa che sincronizzare l’uscita dal reset con il clock di sistema, tale reset è poi collegato a tutti i reset dei vari blocchi.