Capitolo 2
L’interferometria
2.1 Le misure ottiche ai giorni nostri
Abbiamo, nel precedente capitolo, ricordato il sogno di Galileo Galilei di poter misurare le distanze con un raggio di luce. Oggi questo sogno è stato realizzato. I vantaggi di questa idea sono sotto gli occhi di tutti: innanzitutto la semplicità sia del principio che dell’applicazione, poi si elimina la necessità di coprire fisicamente la distanza, insita in altri metodi, si svolgono calcoli relativamente facili e, dunque, meno soggetti ad errori, e, soprattutto, si riescono ad ottenere risultati in tempi decisamente minori ( il che sembra scontato in linea di principio, data l’elevata velocità a cui viaggia la luce, lo è stato un po’ meno in fase di costruzione dei sistemi negli anni passati ).
In generale, ai giorni nostri, un sistema di misura ottico è composto, di base, da almeno tre elementi: una sorgente di luce, un sistema ottico che elabora il segnale luminoso (lo indirizza, lo modula, o vi compie altre operazioni, a seconda dei casi), e un ricevitore che raccoglie il segnale di ritorno e lo decodifica. Ovviamente abbiamo escluso tutta una serie di interfacce con l’utente oramai presenti in ogni strumento.
Per decenni, però, nonostante i vantaggi sopra citati, le tecniche elettro-ottiche sono state usate solo in pochissimi campi, come il controllo e la calibratura di macchine industriali ( quindi un utilizzo per misure di pochi cm e al chiuso dove sono noti e poco variabili i parametri ambientali come temperatura, pressione, indice di rifrazione, ecc. ) oppure l’allineamento di strumenti e misure di angoli ( anche nello spazio ). Nelle misure dirette all’aria aperta l’elettro-ottica era usata solo per tratti di pochi chilometri. I limiti principali in applicazioni con maggiore distanza erano la scarsa coerenza spaziale delle sorgenti di luce e l’eccessiva potenza necessaria
per inviare il segnale a notevole distanza ( e, quindi, l’eccessivo consumo energetico ).
Tutto questo panorama è stato completamente mutato dall’avvento dei laser.
I laser, avendo un’enorme coerenza e potendo portare moltissima potenza in piccolissimi impulsi, hanno permesso l’utilizzo massiccio dell’elettro-ottica nel campo delle misure dirette di distanza, hanno dato nuovi orizzonti allo sviluppo tecnologico del settore permettendo l’introduzione di nuove e più versatili e più agevoli tecniche, inoltre hanno migliorato precisione, risoluzione e invarianza rispetto agli agenti atmosferici per quelle già esistenti.
Le applicazioni dei sistemi ottici che hanno per sorgente di luce un laser sono molteplici e vanno dalla semplice misura diretta di una distanza lineare o angolare, alle misure di velocità, a quelle di spessore o a quella del diametro di un filo. Negli ultimi anni sono state introdotte anche tecniche innovative con le quali si misura il diametro di una fibra ottica, oppure tecniche che permettono di rilevare e ricostruire il profilo di una superficie ( ad es. tecniche di tipo olografico ), ma queste tecniche esulano dall’interesse di questo lavoro.
2.2 I metodi per misurare la distanza
Dopo aver definito cosa vuol dire misurare una distanza, esposto le varie metodologie usate nel passato e sottolineato la recente ed importante introduzione dell’ottica in questo campo, passiamo ad elencare ed illustrare i principi ed i metodi che oggi vengono davvero utilizzati negli strumenti in voga.
Bisogna prima di tutto osservare che l’ottica ha oramai un ruolo dominante in questo campo tanto che, praticamente, non si costruiscono quasi più gli strumenti classici.
In realtà le metodologie usate sono diverse e, ovviamente, ogni ditta produttrice di un modello ha un suo brevetto, ma avendo osservato e studiato numerosi modelli, possiamo concludere che i principi di funzionamento che vengono sfruttati sono tre:
b) il metodo del confronto di fase ( phase shift ) c) il metodo del tempo di volo ( pulse delay ).
L’interferometria, della quale discuteremo nei paragrafi seguenti di questo capitolo, è oggi una tecnica molto in uso in numerosi settori industriali, ma è stata quasi abbandonata nella progettazione di strumenti atti a misurare una distanza lineare perché gli altri metodi risultano più comodi, rapidi e meno costosi. Essa si basa, come dice lo stesso termine, sulle frange di interferenza di due ( o più ) fasci di luce.
Il principio che sta alla base del metodo del confronto di fase consiste nell’invio di un segnale verso l’obiettivo ( target ), il punto da cui misurare la distanza, nel raccogliere con un ricevitore il segnale di ritorno e confrontare la fase del segnale trasmesso con quella del segnale ricevuto. Da questa differenza di fase si può dedurre la distanza da misurare.
Anche nel metodo del tempo di volo si invia un segnale verso il “ target ” e si riceve un segnale di ritorno, in questo caso, però, non si controlla la fase, ma si calcola per mezzo di un timer, o in altri modi, il tempo tra l’invio del segnale e il suo ritorno. E’ intuitivo capire come da questo tempo si possa ricavare lo spazio percorso, è sufficiente conoscere la velocità media del segnale ( trattandosi di un segnale luminoso, spesso si può approssimare a c, la velocità della luce ).
Dei metodi b) e c) parleremo in dettaglio nei prossimi capitoli, ora, invece, torniamo all’interferometria.
Abbiamo detto che essa non è molto utilizzata per la misura diretta in spazio aperto della distanza, ma, nonostante questo, accenneremo i suoi principi di base perché molte tecniche da lei derivate sono in uso e in grande sviluppo per applicazioni particolari, ad es. la cosiddetta interferometria di Moirè oppure l’olografia ( usata in svariati campi e soprattutto per la ricostruzione dei profili delle superfici ).
Altre applicazioni dell’interferometria sono la misura delle deformazioni, il controllo fine di alcuni sistemi industriali di estrema precisione e, in generale, le misure di piccole lunghezze nel settore meccanico ove sia necessaria la mancanza di contatto tra lo strumento che misura e l’oggetto da misurare. Un altro campo in cui l’uso dell’interferometria è fondamentale è quello geologico, la grande
precisione e la grande accuratezza di questo metodo per piccolissime quantità da misurare lo hanno privilegiato per la misura di movimenti tellurici, di piccole variazioni della geografia terrestre dovute ai sismi e, soprattutto per la misura delle derive dei continenti.
Per comprendere il concetto di interferometro, analizziamo un semplice ma chiarificatore strumento che è fondamentale nella storia di questa tecnica: l’interferometro di Michelson, uno strumento che su misure di pochi centimetri ha risoluzione addirittura intorno a 10 – 7 .
2.3 L’interferometro di Michelson
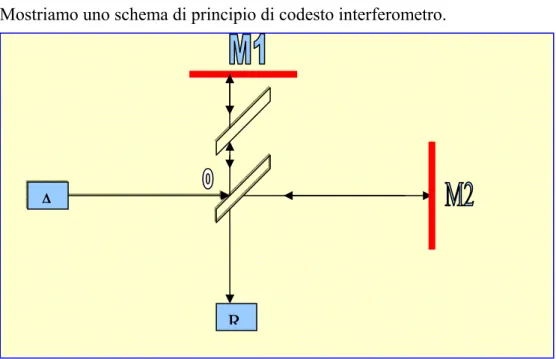
Mostriamo uno schema di principio di codesto interferometro.
Fig. 1 schema dell'interferometro di Michelson
Il blocco A rappresenta la sorgente di luce, ovvero nel nostro caso il laser. Il blocco R invece è il rivelatore.
M1 e M2 sono due specchi a riflessione totale, M2 è fisso in una posizione, mentre M1 è uno specchio mobile che si può muovere, però, solo lungo l’asse verticale che noi, per comodità, chiamiamo asse z.
A
Nello schema vi sono anche due specchi semi-trasparenti che sono inclinati a 45° rispetto al laser.
Illustriamo il funzionamento.
Il laser emette un fascio di luce, questo fascio attraversa lo specchio semi-trasparente e si divide in due fasci, uno oltrepassa lo specchio e prosegue verso lo specchio fisso M2, l’altro viene deviato verso l’alto in direzione dello specchio M1. Entrambi i fasci, dopo esser stati riflessi totalmente dagli specchi M1 e M2, tornano in direzione della lamina semi-trasparente e da questa convogliati verso il rivelatore. La seconda lastra semi-trasparente viene detta di “ compensazione ”. Se essa non ci fosse, si correrebbe il rischio che i fasci, nell’attraversare più volte l’altro specchio semi-trasparente potrebbero avere cammini ottici diversi, pertanto il suo compito è quello di compensare i cammini ottici.
Se il sistema è compensato, al rivelatore arrivano due fasci che hanno comunque percorso un cammino differente. Infatti, dal momento della separazione, un fascio ( quello che colpisce M1, per intenderci ) compie il percorso j:
j = 2(OM1) + (OR) ( 2 . 1 )
mentre l’altro il percorso k:
k = 2(OM2) + (OR) ( 2 . 2 )
dove con R indichiamo la posizione del rivelatore. Si vede che la differenza è
j – k = 2(OM1 - OM2). ( 2 . 3 )
OM2 è la distanza tra il punto O e lo specchio fisso M2 ed è, quindi, nota; OM1 è, invece, la distanza tra O e lo specchio mobile M1 ed è da calcolare. Per semplicità di notazione chiamiamo con la lettera d la quantità OM1 - OM2 e 2d è la differenza tra lo spazio percorso dai due fasci:
Per correttezza bisogna scrivere questa differenza come 2dcosθ dove θ è l’angolo tra l’asse z e la direzione con cui i raggi entrano nel rivelatore. Nel nostro schema θ = 0°, ma non sempre nella pratica si riesce ad ottenere ciò.
In virtù di questa differenza di spazio, i due fasci, ovvero le due onde, avranno una differenza di fase pari a ψ con
ψ = 2π ( 2d ( cosθ ) / λ ) ( 2 . 4 ) in cui λ è, come di consueto, la lunghezza d’onda del fascio luminoso trasmesso. Possiamo scrivere le funzioni che rappresentano le due onde che si propagano lungo l’asse z.
E1 ( z, t ) = E11 exp ( j ( kz + ωt + φ1 )) ; ( 2 . 5 )
E2 ( z, t ) = E22 exp ( j ( kz + ωt + φ2 )) ; ( 2 . 6 )
In queste equazioni, Eii sono le ampiezze delle onde, k la costante di propagazione
dell’onda stessa, ω la frequenza angolare ( 2πf ), φi la fase di ogni onda.
Il fascio complessivo è la somma algebrica dei due fasci e, come per ogni onda, l’intensità I è il modulo al quadrato della funzione che rappresenta l’onda.
I = ( E11 cos ( kz + ωt + φ1 ) + E22 cos( kz + ωt + φ2 ))2 +
+ ( E11 sin ( kz + ωt + φ1 ) +E22 sin( kz + ωt + φ2 ))2 ; ( 2 . 7 )
Applicando le formule trigonometriche si ottiene:
I = (E11)2 + (E22)2 + 2E11E22 cos ( φ1 - φ2 ) = ( nel nostro caso ) =
= (E11)2 + (E22)2 + 2E11E22 cos ψ =
= (E11)2 + (E22)2 + 2E11E22 cos ( 2π ( 2d ( cos θ ) / λ ); ( 2 . 8 )
Questo è, dunque, l’andamento dell’intensità della luce che arriva al rivelatore di un interferometro di Michelson.
E11 = E22 = E.
Così l’intensità risulta
I = 2E ( 1 + cos ( f ( d ))); ( 2 . 9 )
dove
f ( d ) = 2π ( 2d ( cos θ ) / λ ). ( 2 . 10 ) E’ naturale vedere che per f ( d ) = ( 2M + 1 ) π, con M numero intero, l’intensità si annulla, cioè al rivelatore non arriva alcuna luce, mentre, viceversa, se f = 2Mπ, l’intensità della luce sarà massima. Questo fa sì che il rivelatore vedrà un succedersi di frange chiare ( picco di luce ) e frange scure ( buio ), il cui numero sarà proporzionale a d, che, ricordiamo, non è altro che la distanza che noi vogliamo calcolare.
Ovviamente, se il valore di d, la nostra distanza da misurare, varia tra una misura e l’altra ( ovvero lo specchio M1 cambia di posizione ), questo strumento rileva la variazione, perché, se questa variazione è superiore a λ / 2, cambia il numero di frange contate dall’elaboratore.
In questo modo, in sintesi, funziona l’interferometro di Michelson, e su questo principio si basano quasi tutte le altre tecniche di misura interferometriche.
2.4 Limiti dell’interferometria
Nel XIX secolo l’interferometria era già conosciuta, ma la scarsa coerenza della luce ( come in precedenza sottolineato ) permetteva solamente un uso per misurare distanze di pochissimi centimetri. Nel XX secolo invece l’introduzione del laser, ed in particolare del laser He-Ne ( elio-neon ), ha fatto in modo che, con tale tecnica, si misurassero agevolmente distanze di 60 m, con risoluzioni al di sotto del centesimo di millimetro. Valori tipici della lunghezza d’onda λ per il laser He-Ne sono intorno a 0,64 µm. Per maggiori distanze, invece, permangono alcune difficoltà.
Uno dei principali limiti di codesta tecnica di misura è appunto il non riuscire ad ottenere buone precisioni e buone risoluzioni per distanze medie ( dell’ordine del chilometro ) e per distanze elevate ( centinaia oppure migliaia di chilometri ). Lo abbiamo ripetuto più volte, è un difetto intrinseco della metodologia utilizzata dovuto alla possibilità fisica di sistemare gli specchi riflettori ( anche qui è comune l’uso del “ corner cube ” ) e alle difficoltà di compensazione e di creare frange di interferenza leggibili e valide.
Una delle cause maggiori di errore in casi di notevoli distanze è il rischio elevato di disallineamento tra fascio, target e ricevitore.
Altro limite delle metodologie interferometriche è quello di calcolare la posizione di un oggetto non a partire dalla sorgente di luce ( il laser He-Ne ), ma a partire da un altro punto, lo specchio fisso, nel caso visto dell’interferometro di Michelson. In tutti gli strumenti di misura, per capire a fondo la possibilità di applicazione al mondo reale, vanno valutate la reazione e la stabilità dello strumento stesso rispetto a variazioni dell’ambiente circostante. Per quanto riguarda gli strumenti oggetto del nostro lavoro, cioè quelli ottici, gli elementi ambientali che, variando, determinano maggiormente errori ed imprecisioni, sono l’indice di rifrazione dell’aria, la temperatura, l’umidità e la pressione atmosferica. Gli interferometri sono particolarmente sensibili a queste variazioni e sono state inventate una serie di tecniche di compensazione per ovviare a questo problema, soprattutto per quel che concerne le misure fini e le calibrature che hanno necessità di alta precisione ed invarianza nei confronti dell’ambiente. Questa necessità diventa importantissima nel settore delle macchine per l’industria che devono fornire pezzi in serie con le stesse dimensioni e ciò, ovvio, indipendentemente dalle condizioni ambientali nelle quali lavorano.
Perciò raramente si può approssimare l’indice di rifrazione a quello del vuoto e neanche la lunghezza d’onda del fascio a quella che si avrebbe nel vuoto.
Esistono e sono utilizzate delle formule che correggono l’indice di rifrazione n, e quindi λ ( la lunghezza d’onda ), in funzione di T ( temperatura ) e p ( pressione ). Molti costruttori hanno fornito queste formule, ogni formula sembra completamente diversa dall’altra, ma ad una più sottile analisi, le differenze sono davvero poche. Noi riportiamo la formula di un testo di riferimento del settore, un
testo di autori vari ( la formula è presa dalla sez.5 “ laser interferometry for precision engineering metrology ” di P. Gill ).
Definiamo ns come l’indice di rifrazione dell’aria asciutta ad una pressione di 760
Torr e ad una temperatura di 15 °C, esso dipende dalla lunghezza d’onda λ. Per la lunghezza d’onda tipica del laser He-Ne si può scriver all’incirca
ns = 1,0002765 ( 2 . 11 )
La formula da cui ricaviamo n ( T, p ), indice di rifrazione ad una temperatura T e ad una pressione p, è la seguente:
( n – 1 ) = ( ns – 1 ) 100 p ( 1 + 10-8 p ( 61,3 – T )) / ( 96095,4 ( 1 +
+ 0,003661 T )). ( 2 . 12 )
Questo tipo di formule più o meno empiriche danno correzioni piuttosto sensate che permettono di trovare gli n e i λ giusti per calcolare le distanze esatte.
Come si può intuire queste formule non hanno valore solo per strumenti interferometrici, ma hanno una valenza più generale, tendono a misurare l’indice di rifrazione dell’aria in diverse condizioni ambientali indipendentemente dallo strumento e da se noi effettuiamo una misura o altro.
Questi calcoli, come tutti gli altri, vengono, chiaramente, svolti dal blocco elaboratore posto in successione al rivelatore e che, poi, visualizza i risultati sul display.
Per ottenere i valori di T e di p da inserire nella formula citata, sono necessari dei sensori dell’aria che sono in grado di conoscere il valore di p e di rilevare con precisione la temperatura dell’aria stessa. Questi sensori sono, a loro volta, causa di errori: le loro possibili imprecisioni si ripercuotono sul valore di n, su quello di λ, e, quindi, complessivamente sull’esattezza della nostra misura. L’errore portato da questi sensori varia a secondo del sensore utilizzato e dalle condizioni atmosferiche ( temperatura, pressione e umidità ) da valutare. Per la temperatura un errore tipico è di circa 0,1 °C. E’difficile dire, complessivamente, quanto questi errori condizionano la risoluzione e l’esattezza di uno strumento, da caso a caso si passa da accuratezze di 0,1 p.p.m. ad altre, notevolmente maggiori, di 10 p.p.m..
Osserviamo come questi problemi sono molto più ridotti in un ambiente chiuso (dove T e p variano poco) e molto più difficili da affrontare in un ampio spazio aperto per le misure di lunghe distanze ( dove le variazioni di T e p, ed anche dell’umidità, sono decisamente maggiori ).
Continuando nell’elenco degli errori insiti in un sistema interferometrico, dobbiamo discutere dei problemi dovuti alle componenti frequenziali non desiderate della luce laser. Abbiamo in precedenza sottolineato come le λ tipiche del laser per queste applicazioni sono 0,64 µm ( con λ / 2, valore fondamentale per le frange d’interferenza, uguale a 0,32 µm ), quindi stiamo parlando di luce visibile. Le esperienze dimostrano che spesso ritroviamo delle lunghezze d’onda ( e, dunque, delle frequenze ) che disturbano il segnale principale. Difatti esso ha frequenza molto elevata ( se la luce viaggiasse nel vuoto saremmo nell’ordine di 1015 Hz, viaggiando nell’aria in condizioni differenti otteniamo frequenze poco minori e, comunque, molto alte ), ma delle derive verso l’alto o verso il basso di circa 500 MHz, che spesso si verificano, variano il valore di λ e influenzano, quindi, il conteggio delle frange chiare e di quelle scure arrecando così nuovi errori alla nostra misura. Esistono anche, ma con meno potenza e meno influenza, altri shift di frequenza che tendono a complicare il lavoro di calcolo della distanza. Dopo aver visto, rapidamente, una panoramica sulle principali cause di errori delle tecniche interferometriche, ci preme sottolineare che l’interferometro di Michelson, da noi analizzato, è soltanto uno strumento di base. Oggi si trovano in commercio strumenti molto sviluppati, con sistemi multifrequenza, e con retro-azioni di controllo. Per comprendere un po’ di più lo sviluppo attuale di questa tecnica, nel prossimo paragrafo illustriamo uno schema di principio dell’interferometro eterodina.
2.5 L’interferometro eterodina
L’interferometro eterodina è un interferometro A.C. e non D.C., cioè funziona a corrente alternata, evitando così vari problemi, ad es. quelli del trasduttore.
Anche per questo strumento, prima di analizzarlo, inseriamo il disegno di uno schema di base.
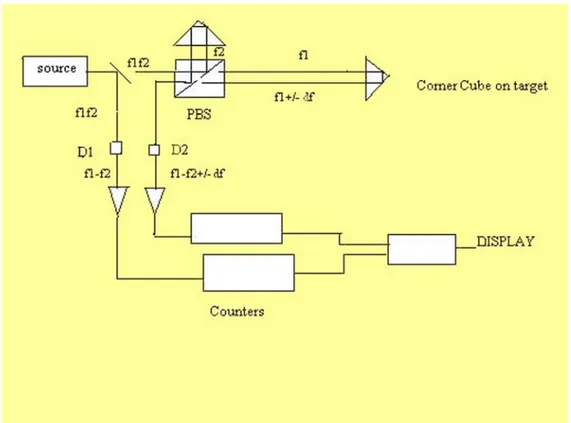
Lo schema si riferisce ad un misuratore di movimento. Questo strumento non misura la distanza assoluta ma a che distanza si trova un oggetto rispetto ad una precedente posizione, in poche parole misura di quanto si è mosso.
Fig. 2 schema dell'interferometro eterodina
Il source è la sorgente di luce. Nell’interferometro eterodina, nei casi pratici, come source viene utilizzato un laser Zeeman stabilizzato. Esso emette due fasci di luce polarizzati ortogonalmente tra di loro con due diverse frequenze f1 e f2, solitamente separate da circa 1 MHz:
|f1 – f2| = 1 MHz. ( 2 . 13 )
Uno specchio inclinato ( del tipo di quelli visti in precedenza ) provvede a dividere il fascio in due direzioni. D1 è un sistema che svolge le funzioni di un mixer con filtro, all’uscita di D1 troviamo un segnale a frequenza f1 – f2 ( intorno ad 1 MHz ) che funge da segnale di riferimento. Uno dei vantaggi dell’eterodina consiste nel
fatto che se vi è uno shift indesiderato delle frequenze del laser, questo non influisce sul nostro sistema, non condiziona il nostro lavoro perché il segnale di riferimento è appunto la differenza fra le frequenze della sorgente e, di conseguenza, resta costante.
Il PBS ( Polarizing BeamSplitter ) è un altro specchio inclinato che, però, oltre a dividere il fascio, lo polarizza come dice il nome stesso. All’uscita da esso otteniamo due segnali, uno a frequenza f1, l’altro a frequenza f2.
Il segnale a frequenza f2 è indirizzato, lungo un braccio dello strumento, verso un prisma Corner Cube ( già citato in precedenza e il cui effetto sul fascio si evince dalla figura ) a distanza fissa e nota.
Il segnale a frequenza f1 è, invece, spedito verso l’obiettivo, il target, ovvero l’oggetto del quale dobbiamo misurare il movimento ( esattamente la distanza di cui si è mosso ). Sul target è posto un altro prisma Corner Cube cosicché il segnale viene riflesso all’indietro in direzione dello strumento ottenendo il segnale di ritorno.
A causa del movimento del target, per effetto Doppler, il segnale di ritorno non ha esattamente la stessa frequenza f1, ma una frequenza leggermente diversa, che ha subito uno shift di una quantità che noi denominiamo δf. La frequenza del segnale di ritorno, dunque, è complessivamente
f3 = f1 +/- δf. ( 2 . 14 ) Questo segnale nel suo cammino di ritorno viene ricombinato col segnale a frequenza f2 dal PBS e, poi, finisce in D2. D2 è un sistema simile a D1 e alla sua uscita abbiamo un segnale a frequenza
f4 = f1 – f2 +/- δf. ( 2 . 15 ) I due segnali sono, infine, opportunamente amplificati, e inseriti ognuno in un contatore che, appunto, conta il succedersi di luce e buio, di frange chiare e frange scure, in pratica il numero di periodi del segnale che trova al suo ingresso. Se δf = = 0, i due contatori danno lo stesso risultato N, ma se il target si è mosso, δf è
diverso da 0 e quindi anche i risultati dei due contatori sono diversi, li chiamiamo M e N.
L’ultimo blocco esegue semplicemente la sottrazione tra M e N, dando così un risultato
Q = M – N; ( 2. 16 )
Q è proporzionale alla quantità δf e, conseguentemente, al valore che intendiamo misurare. Combinando Q con le giuste costanti di proporzionalità possiamo scrivere il risultato raggiunto su di un display.
Si può intuire da questi discorsi anche il perché l’effetto Doppler è molto utilizzato per misurare le velocità.
Il sistema funziona piuttosto bene finché δf ≤ 1 MHz, e questo si capisce anche da un discorso puramente aritmetico poiché per δf maggiori avremmo segnali con frequenze negative che è un assurdo fisico ( in realtà si creerebbero segnali ad altre frequenze, ovviamente positive, ma che nulla avrebbero a che fare con la nostra misura ).
Ci sembra scontato concludere, riconfermandolo, trattandosi di sistemi interferometrici, che tutti i vari modelli di interferometro eterodina misurano piccoli spostamenti e piccole velocità ( dell’ordine di 0,3 m / s ) e queste metodologie non sono applicabili per distanze e velocità molto maggiori.
Si può ulteriormente osservare che lo schema dell’interferometro eterodina non si discosta molto da quello dell’interferometro di Michelson, e, in linea di principio, i due strumenti funzionano in maniera abbastanza simile.
2.6 Lo “ SMART 310 ”, un esempio di utilizzo dell’interferometro
eterodina
In commercio si trovano più aziende che producono svariati sistemi contenenti un interferometro eterodina come strumento di misura.
Uno tra quelli più moderni e con maggiore notorietà è sicuramente lo “ SMART 310 ”, un sistema prodotto direttamente dalla “ Leica Geosystems ”, un colosso del settore.
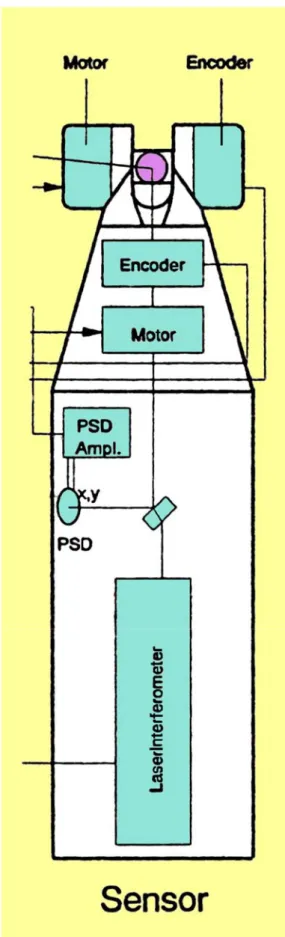
Ecco come si presenta e come è composto lo “ SMART 310 ”.
Come si vede nell’interno dello “SMART 310” è allocato un interferometro laser di tipo eterodina, descritto nel paragrafo precedente.
Oltre all’interferometro, troviamo un “PSD”, cioè un fotosensore bidimensionale ( con due assi: x e y ) che riceve parte del fascio riflesso dal target. All’interno ci sono altri elementi che non sono strettamente necessari per la misura, ma che sono parte integrante del sistema e hanno una loro importante funzione.
Questi sono l’alimentatore, due motori che amplificano, due encoder, l’amplificatore del “ PSD ” e uno specchio inclinato.
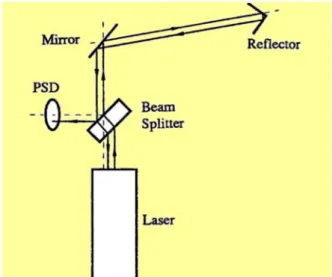
Il funzionamento in dettaglio è quello tipico dell’interferometro eterodina, ma in più lo “ SMART 310 ” presenta l’aggiunta del “ PSD ” che funge da anello di reazione per il controllo dell’allineamento del fascio con il prisma riflettore posto sull’oggetto dal quale si misura la distanza.
Il fotosensore è tarato in modo tale che se riceve il fascio dal centro del prisma la sua uscita è sullo “ zero ” elettrico, un lieve disallineamento del prisma causa uno spostamento da questo “ zero ” e l’effetto di questo spostamento è l’automatico movimento del motore per compensare e ritornare ad allinearsi.
Così si ottiene una alta precisione nel direzionare il fascio.
Fig. 5 funzionamento dello Smart 310
Questo sistema di misura ha le, già più volte citate, applicazioni di tutti i sistemi interferometrici ( controllo delle deformazioni, delle macchine industriali, ecc., ecc., ecc. ) ed, in più, è usato nella robotica di precisione e per lo scanner in 3D degli oggetti.
2.7 Considerazioni finali sul concetto di interferometria e sulle
tecniche con cui esso è applicato
Per concludere questo capitolo riassumiamo alcuni importanti concetti che abbiamo già espresso e che ci servono ad inquadrare il posto che l’interferometria occupa all’interno delle tecniche di misure.
Il primo concetto da evidenziare è che l’interferometria non è soltanto una tecnica contemporanea, ma esiste da tempo con svariate sorgenti di luce ( led, lampade, ecc., ecc. ). L’introduzione del laser le ha aperto nuove opportunità e nuovi campi di utilizzo, ma ha anche permesso l’invenzione di altre metodologie che, in altri settori, hanno superato l’interferometria stessa.
Per quanto riguarda l’argomento del nostro lavoro, cioè il campo della misura delle distanze, l’interferometria ha il grandissimo vantaggio di essere molto precisa e di avere un alta risoluzione. Il suo principale difetto, come numerose altre volte riferito, è l’inutilizzabilità per medie e grandi distanze.
Un altro limite importante, come visto nel paragrafo 4 di questo capitolo, è la necessità di un target cooperativo, come si dice in gergo, ovvero di un target che rifletta quasi per intero il segnale, con scarsissimo assorbimento della luce e poche perdite in termini di potenza lungo il tragitto percorso. In pratica, ciò comporta l’obbligo di porre sopra il target un prisma riflettente, in genere un “Corner Cube”, e non sempre abbiamo questa possibilità.
Per questi e altri motivi, possiamo sostenere che oggi l’interferometria è una maniera di misurare piuttosto particolare.
Pensiamo, che dopo questa discussione, sia abbastanza più agevole, per i nostri eventuali lettori, comprendere come l’interferometria, per la sua estrema precisione è utilizzata tantissimo nei settori industriali, nei controlli dimensionali dei macchinari ( sia le dimensioni dei prodotti che il controllo della posizione relativa di parti della macchina e parti di prodotti ), nelle misure di deformazione degli oggetti, ed anche, talvolta, nella valutazione dei movimenti delle zolle della crosta terrestre.
Invece, per quanto riguarda il settore che a noi più interessa, cioè la misura della distanza lineare, l’interferometria è in uso solo per brevi tratti da misurare o per calibrare e tarare altri strumenti di misura delle distanze.
Gli strumenti interferometrici hanno praticamente sostituito i calibri meccanici. Come abbiamo osservato per il sistema interferometrico eterodina, però, queste tecniche, sfruttando l’effetto Doppler, sono ancora in auge per la misura delle velocità.
Il più importante sviluppo dell’interferometria è, certamente, l’olografia che è, principalmente, usata per il rilievo e le riproduzione su calcolatore ( o, in generale, su di uno schermo ) dei profili delle superfici, ma oramai è stata adottata in molteplici applicazioni di diversi campi.
Per le misure di distanze medie e grandi in campo aperto, al contrario, oggi, i più moderni mezzi della tecnica sfruttano gli altri due metodi di misura: quello del confronto di fase e quello del tempo di volo, che noi analizzeremo nei successivi capitoli.