5
Leggi di controllo per il sistema di attuazione
5.1
Requisiti di risposta in frequenza di ciclo chiuso
Anche i requisiti sulle prestazioni dell’intero sistema controllato in ciclo chiuso vengono forniti tramite curve limite di accettazione sulla risposta in frequenza.
Le curve limite di accettazione illustrate in figura 5.1 sono relative ad un comando di posizione impartito al pistone dell’attuatore di ampiezza maggiore o uguale all’1% del fondocorsa.
Figura 5.1 – Curve limite di accettazione per il sistema di attuazione controllato in ciclo chiuso (Comando ≥ 1% fondocorsa)
5.2
Controllo proporzionale
In analogia a quanto fatto per la servovalvola DDV sono state inizialmente valutate le prestazioni del sistema in ciclo chiuso con un controllo di tipo proporzionale puro. Per avere una stima in prima approssimazione del guadagno da utilizzare per la prima prova sperimentale è stato utilizzato il modello linearizzato descritto nel capitolo 4.
Il modello linearizzato del sistema controllato in ciclo chiuso è immediatamente ricavabile a partire dalla f.d.t. linearizzata di ciclo aperto (4.23) (per la servovalvola si utilizza il controllo con rete ritardatrice-anticipatrice):
) ( 1 ) ( ) ( s G K s G K s G sys sys sysCL + ⋅ ⋅ = (5.1)
Tramite il toolbox Sisotool di Matlab è facile studiare il comportamento della risposta di ciclo chiuso al variare del guadagnoK in relazione ai requisiti imposti.
Utilizzando i valori dei parametri definiti in tabella 4.1, per un valore del guadagno
K pari a 0.15 il modello linearizzato fornisce la risposta illustrata nel diagramma di Bode di figura 5.2, mentre in figura 5.3, 5.4 e 5.5 vengono illustrati il luogo delle radici della f.d.t. di ciclo chiuso ed il diagramma di Bode generalizzato della f.d.t. di ciclo aperto.
Figura 5.3 – Luogo delle radici per la f.d.t. di c.c. del sistema di attuazione
Figura 5.4 – Luogo delle radici per la f.d.t. di c.c. del sistema di attuazione (zoom ed identificazione delle dinamiche principali)
La risposta di ciclo chiuso prevista del modello linearizzato rispetta i requisiti e garantisce buoni margini di stabilità: la prima prova sperimentale è stata quindi effettuata con un controllo proporzionale avente un guadagno di chiusura Kpari a 0.15.
Le prove sperimentali effettuate hanno evidenziato le differenze tra la risposta reale e la risposta prevista dal modello linearizzato. Per quanto riguarda il la risposta di ampiezza il modello linearizzato prevede adeguatamente il valore del guadagno statico confermando l’attendibilità dell’ordine di grandezza dei valori numerici dei parametri utilizzati, ma non riesce a prevedere bene il comportamento del sistema per frequenze superiori a 3 Hz. Per quanto riguarda invece il diagramma di fase, la risposta prevista dal modello linearizzato è in accordo con quella del sistema reale ad eccezione dell’intervallo di frequenze compreso tra 15 Hz e 50 Hz (figura 5.6).
Queste differenze sono imputabili al comportamento nonlineare della DDV
Figura 5.6 – Confronto tra la risposta di ciclo chiuso dell’attuatore reale e quella prevista dal modello linearizzato descritto nel capitolo 4
Per ottenere una funzione di trasferimento da utilizzare in Sisotool per la sintesi dei controllori che consentisse di prevedere con maggiore accuratezza la risposta del sistema nella zona più critica per il rispetto dei requisiti (9-20 Hz), si è deciso di realizzare un modello linearizzato con la medesima struttura,i cui parametri sono stati però tarati a partire dai dati sperimentali disponibili (paragrafo 5.2.2).
5.2.1 Effetto delle forze di flusso sulla dinamica della DDV
Tutte le prove sperimentali relative alla dinamica della servovalvola DDV presentate nel capitolo 3 sono state effettuate senza efflusso di portata verso o dall’attuatore poiché è a questa condizione operativa che si riferiscono le specifiche di risposta in frequenza. Quando la servovalvola opera in combinazione con l’intero sistema di attuazione il passaggio di fluido idraulico genera delle forze di natura idrodinamica che agiscono sullo spool e ne variano la risposta dinamica.
In modo da fornire un quadro completo delle prestazioni della servovalvola si è quindi deciso di effettuare una prova di risposta in frequenza in presenza di tali “forze di flusso”. Per una corretta esecuzione della prova la servovalvola dovrebbe essere stimolata con un segnale di comando sinusoidale (proveniente dal controllore del loop esterno del sistema di attuazione) che dovrebbe avere la medesima ampiezza ad ogni frequenza, tuttavia, poiché la servovalvola si trova ad operare assieme all’intero sistema di attuazione, tale segnale di comando dipende dal segnale comando di posizione del pistone (loop esterno), dal controllore, e dal feedback di posizione del pistone e di conseguenza anche dalla dinamica di quest’ultimo.. Anche utilizzando un controllo di tipo proporzionale per il loop esterno non è quindi immediato determinare a priori l’ampiezza del comando al pistone che ad ogni frequenza determina un segnale di comando alla servovalvola dell’ampiezza desiderata. L’ampiezza del comando al pistone opportuna ad ogni frequenza è stata quindi determinata sperimentalmente attraverso prove ripetute.
In tabella 5.1 vengono riportati (peri ogni frequenza di test) il valore dell’ampiezza del segnale di comando al pistone ed il corrispondente segnale di comando alla servovalvola ottenuto. (xram_com massimo pari a 60 mm, xsv_com massimo pari a 0.8 mm)
Come si può leggere in tabella la prova è stata effettuata per comandi (alla servovalvola) di piccola ampiezza ( circa 10%): i risultati sono illustrati in figura 5.7.
Frequenza xram com xsv com 0.5 Hz 15,0% 11.0% 2 Hz 3,3% 9.8% 5 Hz 1.6% 12.1% 10 Hz 0.8% 11.3% 20 Hz 0.7% 12.3% 30 Hz 0.7% 10.1% 40 Hz 1,0% 10.2% 50 Hz 1,0% 10.9% 55 Hz 1,0% 10.6% 60 Hz 2.9% 10.7% 65 Hz 1,0% 9.8% 70 Hz 1,0% 9.3%
Tabella 5.1 – Ampiezze del segnale di comando al pistone (loop esterno) utilizzati per la prova di risposta in frequenza della servovalvola DDV in presenza di forze di flusso
Figura 5.7 – Risposta sperimentale della servovalvola in assenza o in presenza di forze di flusso
La risposta della servovalvola con passaggio di portata risulta essere attenuata: questo dimostra che le forze di flusso agenti sullo spool ne ostacolano il movimento.
Il modo più semplice per tener conto in un modello della presenza di tali forze di flusso (come accennato nel paragrafo 2.2.1) è quello di considerare la presenza di un contributo aggiuntivo alla rigidezza dello spool [4]:
s f
f K x
F =− (5.2)
In questo modo con il modello semiempirico si riesce ad ottenere (utilizzando un valore di rigidezza opportunamente incrementato) una buona corrispondenza con la risposta sperimentale in bassa frequenza, ma non si riesce a prevedere in modo adeguato la dinamica della servovalvola per frequenze superiori a 20Hz (figura 5.8): è evidente che in alta frequenza la dinamica del fluido idraulico è più complicata e la (5.2) non è adeguata per descrivere le forze che si generano.
Figura 5.8 – Confronto tra la risposta del modello semiempirico e la risposta sperimentale in presenza di forze di flusso
5.2.2 Taratura dei parametri del modello linearizzato
Per poter tarare i parametri del modello occorre prima di tutto conoscere la risposta di ciclo aperto del sistema di attuazione: questa non si può ottenere sperimentalmente in modo diretto poiché il martinetto risponde in velocità ad un comando in ingresso. E’ comunque possibile ricavare la risposta in ciclo aperto a partire dalla risposta in ciclo chiuso; dalla (5.1) si ricava:
)) ( 1 ( ) ( ) ( s G K s G s G sysCL sysCL sys = − (5.3)
La risposta di ciclo aperto così ricavata è mostrata in figura 5.9:
Figura 5.9 – Risposta di ciclo aperto del sistema di attuazione ricavata a partire dalla risposta sperimentale di ciclo chiuso (equazione 5.2)
In base è quanto evidenziato nel capitolo 4 il sistema le principali dinamiche del sistema di attuazione sono le seguenti:
• Integratore (polo nell’origine)
• Interazioni servoelastiche (2 zeri e 2 poli complessi coniugati)
• Dinamica di ciclo chiuso della servovalvola DDV (globalmente assimilabile ad un secondo ordine)
• Trasduttore di posizione del pistone (4.24)
Il sistema linearizzato può dunque essere espresso nella forma seguente:
) ( 1 2 1 1 2 1 2 ) ( 2 2 2 s S s s s s s s s K s G LVDTRam DDV DDV DDV pSEL pSEL pSEL zSEL zSEL zSEL sys sys ⋅ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ + + ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ⋅ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ + + ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ + + ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ⋅ = ω ζ ω ω ζ ω ω ζ ω (5.4)
con i parametri da tarare sulla risposta di figura 5.9.
Per scegliere il valore di Ksysè sufficiente considerare un valore della risposta a 1 Hz
( 6.28 rad/s ): a questa frequenza il sistema non risente degli effetti della dinamica della servovalvola né delle interazioni servoelastiche:
⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ ⋅ ⋅ = 20 ) 1 ( exp 10 j G Ksys sys (5.5)
Per quanto riguarda gli zeri ed i poli complessi coniugati associati alle interazioni servoelastiche del sistema i valori dei parametri sono stati scelti cercando di far corrispondere con la risposta sperimentale la posizione e l’intensità del ritardo di fase localizzato generato da tali singolarità.
Particolare attenzione merita invece il valore della pulsazione del secondo ordine associato alla dinamica della servovalvola DDV. Non si riesce infatti a trovare un valore che approssima bene la risposta sperimentale di ampiezza e di fase per tutte le frequenze: ad esempio con ωDDV pari a 25 Hz si approssima bene la risposta di fase (per tutte le frequenze) ma la risposta di ampiezza è ben approssimata solo fino a 15 Hz; con ωDDV pari a 35 Hz si approssima meglio la risposta in ampiezza, ma si commettono grandi errori sulla fase nell’intervallo compreso tra 20 e 50 Hz (figura 5.10).
Figura 5.10 – Confronto tra la risposta di ciclo aperto ricavata dai dati sperimentali di ciclo chiuso e la risposta prevista dal modello linearizzato per diversi valori di banda
passante della dinamica di ciclo chiuso associata alla servovalvola DDV
Ciò è dovuto al comportamento nonlineare della servovalvola che diminuisce la propria banda passante all’aumentare del comando. Per chiarire il fenomeno è utile ricavare dai dati sperimentali l’andamento in frequenza dell’ampiezza del comando di posizione u inviato alla servovalvola:
(
1 ( ))
) ( ) ( G s s r K s u = − sysCL (5.6)Figura 5.11 – Andamento in frequenza dell’ampiezza del comando alla servovalvola DDV
Come si può osservare in figura 5.11 per frequenze superiori a 10 Hz, ovvero dove il sistema è sensibile alla dinamica della servovalvola, il comando è sempre superiore al 15%; il massimo del comando si ha nell’intervallo 15-25 Hz dove si supera il 30%.
Facendo riferimento alla risposta sperimentale della servovalvola DDV controllata con rete ritardatrice-anticipatrice esaminata nel paragrafo 3.5, si osserva che per comandi pari al 15% o superiori è sempre presente la saturazione associata all’aumento degli attriti viscosi; si può estrapolare che la banda passante della servovalvola si riduce da circa 40Hz in corrispondenza di un comando pari al 15% fino a circa 20Hz in corrispondenza di un comando pari al 30%; riguardo all’andamento delle fasi, la pendenza della curva a valle della saturazione rimane la stessa indipendentemente dalla frequenza alla quale si verifica la saturazione.
A partire da queste osservazioni si riesce prevedere a grandi linee gli effetti delle nonlinearità della servovalvola sul sistema di attuazione e si comprende il motivo per il quale non si riesce ad individuare un valore di ωDDV univoco:
• Gli effetti sulla risposta di fase del sistema di attuazione dipendono soprattutto dalla pendenza della curva di fase (della DDV) a valle della saturazione, la quale non varia sensibilmente se il comando varia dal 15% al 30%. Il comportamento in fase della servovalvola in ciclo chiuso è quindi sempre ben approssimabile con un second’ordine avente banda passante 25 Hz.
• Per frequenze comprese tra 15 e 20 Hz il comando impartito alla servovalvola è dell’ordine del 30%: di conseguenza la risposta in ampiezza della DDV è ben approssimata da un second’ordine avente banda passante 25Hz. Per frequenze superiori, il comando si riduce sino a valori inferiori al 20%, condizione per la quale la risposta in ampiezza è invece ben approssimata da un second’ordine avente banda passante superiore a 30 Hz.
Osservando la figura 5.1 si vede che le curve limite di accettazione sono fornite sino a 20Hz: poiché desideriamo un modello linearizzato che dia delle indicazioni quanto più affidabili possibile sulla risposta di ciclo chiuso in questo intervallo di frequenze, conviene in definitiva scegliere ωDDVpari a 25 Hz.
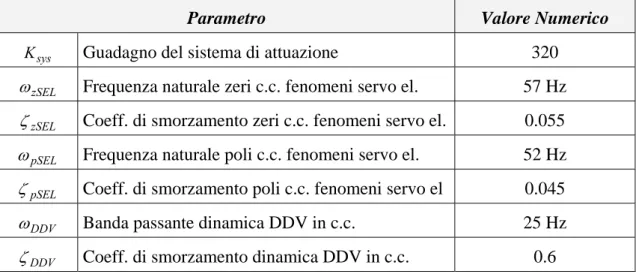
In tabella 5.2 sono stati riassunti i valori scelti per i parametri del sistema linearizzato, mentre in figura 5.12 viene confrontata la risposta sperimentale di ciclo chiuso con quella ottenuta con tale modello.
Parametro Valore Numerico
sys
K Guadagno del sistema di attuazione 320 zSEL
ω Frequenza naturale zeri c.c. fenomeni servo el. 57 Hz zSEL
ζ Coeff. di smorzamento zeri c.c. fenomeni servo el. 0.055
pSEL
ω Frequenza naturale poli c.c. fenomeni servo el. 52 Hz
pSEL
ζ Coeff. di smorzamento poli c.c. fenomeni servo el 0.045 DDV
ω Banda passante dinamica DDV in c.c. 25 Hz
DDV
ζ Coeff. di smorzamento dinamica DDV in c.c. 0.6
Figura 5.12 – Confronto tra la risposta sperimentale di ciclo chiuso del sistema di attuazione e la risposta prevista dal modello linearizzato
5.3
Controllo proporzionale con rete
ritardatrice-anticipatrice
Osservando la risposta in ciclo chiuso del sistema con controllo proporzionale (figura 5.6) si nota che non viene rispettato il limite imposto dalla curva di accettazione superiore per frequenze superiori a 10 Hz circa.
La prima soluzione considerata è stata l’aggiunta di una rete ritardatrice-anticipatrice posizionata in tale intervallo di frequenze con lo scopo di attenuare la risposta di ampiezza senza penalizzare troppo la risposta di fase che è già marginale con il controllo proporzionale.
La posizione ottimale per lo zero ed il polo della rete è stato individuato utilizzando il modello linearizzato tarato sui dati sperimentali descritto nel paragrafo 5.2.1 all’interno del toolbox Sisotool di Matlab.
In definitiva si è giunti alla seguente f.d.t. per il controllore:
⎟ ⎠ ⎞ ⎜ ⎝ ⎛ + ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ + ⋅ = 1 30 1 40 15 . 0 ) ( s s s Csys (5.7)
In figura 5.13 viene mostrato il diagramma di Bode del controllore, mentre in figura 5.14 e 5.15 vengono mostrati i risultati sperimentali confrontati anche con risposta prevista dal modello linearizzato: la risposta del sistema rispetta i requisiti di ampiezza e riesce a rispettare, seppur in modo marginale i requisiti sulla fase.
Figura 5.14 – Risposta del sistema di attuazione controllato con rete ritardatrice-anticipatrice
Figura 5.15 – Risposta del sistema di attuazione controllato con rete ritardatrice-anticipatrice (ingrandimento della zona critica per i requisiti)
5.4
Controllo proporzionale con notch filter
Poiché l’effetto di attenuazione che si desidera ottenere per rispettare i requisiti è limitato ad un ristretto intervallo di frequenze (da 10 a 20 Hz), una soluzione alternativa alla rete ritardatrice-anticipatrice illustrata nel paragrafo 5.3 è quella di utilizzare un
notch filter con elevato smorzamento. Anche in questo caso la posizione ottimale delle
singolarità è stata determinata con l’ausilio di Sisotool e del modello linearizzato giungendo alla seguente f.d.t. del controllore:
1 2 . 94 65 . 0 2 2 . 94 1 2 . 94 5 . 0 2 2 . 94 15 . 0 ) ( 2 2 + ⋅ + ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ + ⋅ + ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ ⋅ = s s s s s Csys (5.8)
In figura 5.16 viene mostrato il diagramma di Bode del controllore, mentre in figura 5.17 e 5.18 vengono mostrati i risultati sperimentali confrontati anche con risposta prevista dal modello linearizzato: anche in questo caso il controllo riesce a rendere la risposta del sistema conforme ai requisiti di ampiezza pur restando marginale sui requisiti di fase. Si può tuttavia notare un leggero miglioramento della risposta in fase rispetto al controllo con rete ritardatrice-anticipatrice.
Figura 5.17 – Risposta del sistema di attuazione con controllo proporzionale con notch filter
Figura 5.18 – Risposta del sistema di attuazione con controllo proporzionale con notch filter (ingrandimento della zona critica per i requisiti)
5.5
Controllo proporzionale con due notch filter
Sia il controllo con rete ritardatrice-anticipatrice che il controllo con Notch Filter illustrati nei paragrafi 5.3 e 5.4 rispettano i requisiti. Tali controlli non vanno a modificare la risposta in frequenza del sistema nell’intervallo di frequenze interessato dai fenomeni di interazione servoelastica del sistema (intorno a 50 Hz) i cui effetti sembrano comunque essere sufficientemente attenuati dalla dinamica del sistema stesso.
E’ però opportuno considerare che i requisiti sono imposti sulla risposta in frequenza della posizione del pistone ed è quindi in riferimento alla dinamica in posizione del pistone che sono stati sviluppati i modelli e sono state svolte le prove sperimentali: quando il sistema di attuazione è montato sul velivolo è invece più importante considerare la dinamica in deflessione della superficie di controllo che viene movimentata dal pistone.
Nel modello teorico approssimato del sistema di attuazione le f.d.t. la risposta in deflessione della superficie di controllo (schematizzata con la posizione della massa mL, figura 4.1) si differenzia dalla risposta in posizione del pistone principalmente per l’assenza degli zeri complessi coniugati al numeratore [4].
(
)
(
)
(
)
⎥⎦ ⎤ ⎢ ⎣ ⎡ + + ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + + + + = h s L s h h s s c h s L s h q x K K m K K s K K V K K K K m C K s s K s G p β 2 ) ( ~ 2 (5.9)La presenza degli zeri nella risposta in posizione del pistone attenua l’effetto di amplificazione generato dai poli complessi coniugati al numeratore: questo effetto di attenuazione non è presente invece nella risposta in deflessione che risulterà dunque più amplificata. La figura 5.19 mostra la risposta in deflessione prevista dal modello linearizzato per i due valori limite che può assumere la banda passante della servovalvola DDV (paragrafo 5.2.1): la risposta in deflessione reale dovrebbe esservi plausibilmente compresa.
Pensando in funzione del sistema di attuazione montato sul velivolo risulta dunque utile attenuare l’effetto delle interazioni servoelastiche: questo si può ottenere inserendo un opportuno notch filter. Come base è stato usato il controllo con notch filter descritto nel paragrafo 5.4 poiché si è dimostrato leggermente migliore rispetto al controllo con rete ritardatrice e si è giunti alla seguente f.d.t. per il controllore:
⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + ⋅ + ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ + ⋅ + ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ ⋅ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + ⋅ + ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ + ⋅ + ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ ⋅ = 1 314 5 . 0 2 314 1 314 05 . 0 2 314 1 2 . 94 65 . 0 2 2 . 94 1 2 . 94 5 . 0 2 2 . 94 15 . 0 ) ( 2 2 2 2 s s s s s s s s s Csys (5.10)
Figura 5.19 – Risposta in deflessione della superficie di controllo prevista dal modello linearizzato per i due valori estremi che può assumere la banda passante della
servovalvola DDV
In figura 5.20 viene mostrato il diagramma di Bode del controllore (5.10) ed in figura 5.19 vengono mostrati gli effetti positivi dell’aggiunta del notch filter di alta frequenza sulla risposta in deflessione stimata con il modello linearizzato.
In figura 5.21 e 5.22 viene invece mostrata la risposta sperimentale in posizione del pistone confrontata con risposta prevista dal modello linearizzato: con questo controllo riesce effettivamente a ridurre la risposta del sistema alle frequenze in cui si verificano le interazioni servoelastiche tuttavia l’interazione tra le singolarità del secondo Notch
Filter ed i poli della f.d.t. della servovalvola (si faccia riferimento al luogo delle radici
di figura 5.4) determina una indesiderata amplificazione della risposta di ampiezza del sistema intorno a 10 Hz.
Nonostante questo, il controllo riesce comunque a soddisfare, seppure marginalmente, sia i requisiti in ampiezza che i requisiti in fase.
Figura 5.20 – Diagramma di Bode del controllore (5.10)
Figura 5.21 – Risposta del sistema di attuazione con controllo Proporzionale con notch filter ed un secondo notch filter per attenuare le interazioni servoelastiche
Figura 5.22 – Risposta del sistema di attuazione con controllo Proporzionale con notch filter ed un secondo notch filter per attenuare le interazioni servoelastiche
di alta frequenza (ingrandimento della zona critica per i requisiti)
5.6
Confronto tra le diverse tipologie di controllo
In questo paragrafo si propone un confronto tra i controlli descritti nei paragrafi 5.3, 5.4 e 5.5. Il controllo che rispetta meglio i requisiti (il meno marginale) è quello con un unico Notch Filter posto a 15 Hz (f.d.t. (5.10)); l’aggiunta di un Notch Filter posto a 50 Hz risolve l’eventuale problema delle amplificazioni della risposta in deflessione della superficie di controllo dovute alle interazioni servoelastiche ma riduce considerevolmente i margini rispetto ai requisiti.
Figura 5.23 – Confronto tra le risposte di ciclo chiuso che si ottengono con i controlli proposti
Figura 5.24 – Confronto tra le risposte di ciclo chiuso che si ottengono con i controlli proposti (ingrandimento della zona critica per i requisiti)