6
Capitolo 1
Quadro di riferimento teorico della tesi
Il presente lavoro non può prescindere dalle teorie che negli ultimi anni stanno cambiando l’approccio della robotica al modo di pensare e costruire robot. Tali teorie sono sottese dalle sempre più fini e approfondite conoscenze degli aspetti biologici di natura anatomica e morfo-funzionale, presupposti e fondamenta dell’avanzamento delle tecnologie robotiche. Questo allo scopo del raggiungimento di un sempre più alto e articolato livello di interazione tra robot e ambiente circostante.
1.1 Robotica biomimetica
Il termine “biomimetica”, coniato da Otto H. Schmitt, descrive gli studi e l’imitazione dei metodi, dei meccanismi e dei processi esistenti in natura. Le capacità della natura, infatti, sono molto superiori alle capacità umane in molte aree e ispirarsi all’ambiente naturale può migliorare significativamente la nostra tecnologia. Attraverso l’evoluzione la natura, con continue “sperimentazioni” in ambito fisico, chimico, meccanico, neurosensoriale e in molti altri campi riferibili al mondo della scienza e dell’ingegneria, ha realizzato molte soluzioni alle sfide che essa stessa crea e ha migliorato sempre più le soluzioni vincenti. A tali soluzioni l’uomo si è sempre ispirato: per esempio, le metodologie utilizzate per rendere possibile il volo sono state ispirate alle caratteristiche degli uccelli. Una volta che il volo è divenuto possibile i miglioramenti nelle tecnologie degli aerei hanno portato a capacità che eccedono quelle degli animali a cui ci si era ispirati.
Ne discende logicamente che i ricercatori nel campo della robotica concordino sempre maggiormente che le idee provenienti dall’ambiente biologico naturale possono essere d’aiuto per la creazione di robot autonomi. Gli organismi biologici, infatti, si sono evoluti per sopravvivere in un mondo caratterizzato da rapidi cambiamenti, grande incertezza e limitata possibilità di reperire informazioni [1]. Al contrario, i robot industriali operano in ambienti altamente modulati e controllati.
7
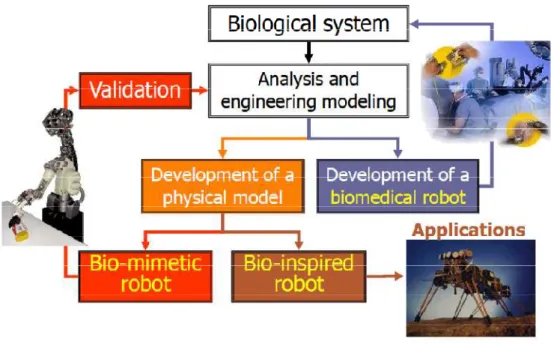
La robotica biomimetica, però, ha uno scopo ancor più ampio. Essa, infatti, è l’applicazione della robotica allo studio dei sistemi biologici. Il suo scopo non è quindi solo quello d’ispirarsi al mondo naturale, come lo è per la robotica bioispirata, ma a ciò aggiunge la sfida di fornire un utile strumento di verifica per le scienze biologiche. In Fig. 1.1. viene mostrato uno schema che illustra la differenza di scopi dei due approcci.
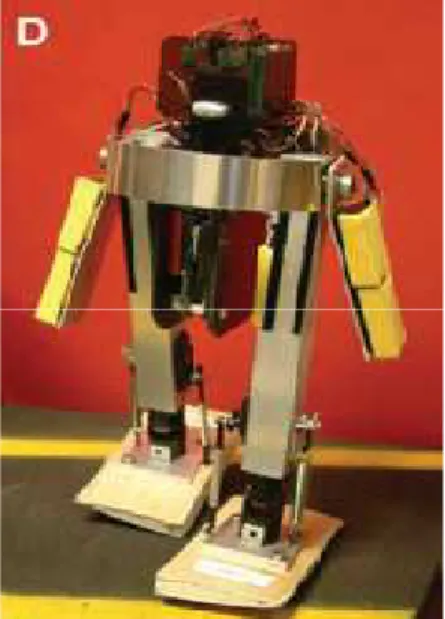
La robotica biomimetica, infatti, fornisce la possibilità di dare ulteriore conferma ai modelli biologici che sono serviti da ispirazione alla progettazione dei robot stessi. Un esempio di tale approccio lo si ha, per esempio, nel robot umanoide di Fig. 1.1 che viene impiegato come piattaforma robotica per validare un modello teorico di apprendimento della coordinazione senso-motoria nei neonati [3]. Poter utilizzare un artefatto fisico invece di un modello teorico, infatti, porta a poter osservare direttamente l’interazione con l’ambiente che rappresenta il miglior campo di test possibile, al di là di qualsiasi simulazione artificiale del mondo fisico. Come viene riferito da Brooks, infatti, “risulta più facile costruire robot reali che simulare interazioni complesse col mondo, incluse la percezione e il controllo motorio. Escludendo queste ci si priverebbe di intuizioni chiave nella natura dell’intelligenza umana”. Le prestazioni ed i comportamenti dei robot possono così essere comparate con quelle del sistema biologico servito da ispirazione. In questo modo si possono validare o, al contrario,
Fig. 1.1 Dallo studio del sistema biologico può nascere un robot bio-ispirato - creato per applicazioni nell’ambiente di riferimento - o un robot biomimetico - che ha possibilità sia di far muovere un sistema robotico nell’ambiente sia di validare le teorie biologiche secondo le quali è stato costruito.
8
disconfermare le ipotesi proposte sul sistema biologico in esame. Infatti, se un dispositivo si comporta in accordo con ciò che la teoria alla sua base permette di prevedere, tale test rinforza la teoria proposta [4]. La biomimetica permette, quindi, di sviluppare piattaforme fisiche equivalenti ai sistemi biologici, al fine di testare sperimentalmente “modelli” di sistemi viventi e loro principi funzionali.
Sono possibili molti livelli di bioispirazione, da una vaga somiglianza ad una stretta emulazione. Nel caso della locomozione di robot ispirati ad insetti un semplice esempio di ispirazione biologica può essere rappresentato dall’osservazione che l’uso di sei zampe nell’insetto fornisce maggiore stabilità. Nello stesso ambito un esempio di emulazione consiste nello studio del numero e della configurazione dei gradi di libertà della zampa utilizzati dall’insetto per attraversare terreni accidentati, sulla base degli effetti di torsione che questi gradi di libertà esercitano, e nella sua applicazione allo scopo di selezionare la migliore geometria del robot [Mazzolai].
Tuttavia, l’idea di copiare pedissequamente la natura non può aver successo, sia perché la natura è troppo complessa per prestarsi a tale scopo, sia perché non è detto che le soluzione adottate dal mondo animale siano le migliori possibili per un robot.
Un esempio di robot biomimetico è rappresentato dal robot-salamandra sviluppato dal gruppo del professor Ijspeert. Gli obiettivi del progetto sono stati quelli di esplorare nuove tecnologie ispirate alla salamandra per sviluppare un robot che potesse sia nuotare che camminare. Per raggiungere tale obiettivo il gruppo ha sviluppato modelli neurali per investigare il controllo della locomozione nella salamandra ed usare il robot stesso per testare i modelli neurobiologici relativi. Tale doppia finalità rispecchia a pieno il duplice proposito della ricerca biomimetica.
La scelta dell’animale da imitare è caduta sulla salamandra che, come anfibio, rappresenta tra i vertebrati un animale chiave nel processo evolutivo dagli habitat acquatici a quelli terrestri. Inoltre essa è situata ad un giusto livello di complessità tra i vertebrati (abbastanza semplice per farne un modello comprensivo ma sufficientemente complesso in termini di similarità del funzionamento del suo SNC rispetto ai vertebrati più evoluti). Il lavoro di questi autori si è basato sull’elaborazione di reti neurali. Nei vertebrati le reti neurali presenti nella parte ventrale del midollo spinale sono responsabili della generazione dei comportamenti locomotori ritmici, come l’atto del camminare o del nuotare, anche in assenza di afferenze cerebrali e sensoriali. Tali reti spinali sono noti anche come
9
modello biologicamente plausibile di un CPG capace di produrre i tipici movimenti di nuoto e di cammino della salamandra.
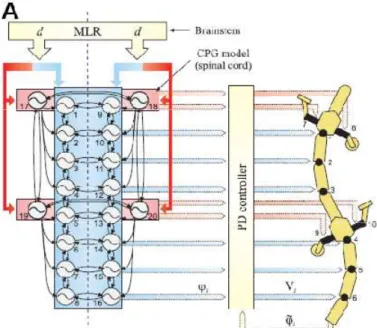
Il CPG del corpo è formato da una doppia catena di 16 oscillatori accoppiati al vicino più prossimo per attuare i motori nella spina mentre il CPG degli arti è composto da 4 oscillatori (17-20 in Fig.1.2) per attuare i motori[5].
Sono stati sviluppati un circuito locomotorio che produce il gait natatorio quando l’input tonico è applicato al CPG del corpo e il gait del cammino quando l’input tonico è applicato sia al CPG del corpo che a quello degli arti. Il CPG del corpo quindi produce spontaneamente il nuoto se attivato da un input tonico. Se si attiva il CPG degli arti ciò fa sì che l’intero CPG dia il cammino. Infatti, le forze dell’accoppiamento dagli oscillatori degli arti a quelli del corpo sono più forti delle altre quindi il CPG corpo è forzato a produrre il cammino. Inoltre gli oscillatori degli arti non possono oscillare ad alte frequenze, ciò sottende il passaggio tra le due modalità di gait al cambio dell’input.
Fig. 1.2 Il CPG riceve gli input d destro e sinistro dalla regione locomotoria mesencefalica nel midollo spinale, grazie a questi si possono cambiare velocità, direzione e tipo di gait. Le uscite degli oscillatori sono utilizzate per determinare gli angoli desiderati φ dati ai controllore a feedback PD che controllano i momenti del motore (attraverso il voltaggio) una volta che gli sono forniti gli angoli attuali φ
10
Questo studio evidenzia come un controllore per la locomozione tetrapode possa essere costruito sopra un circuito di nuoto primitivo (in senso evoluzionistico) e spiega il meccanismo della transizione di gait, il passaggio dal nuoto al cammino e la coordinazione di corpo ed arti. La modificazione delle frequenze intrinseche e di saturazione negli oscillatori spinali fornisce inoltre un meccanismo generale di generazione di gait multipli nei vertebrati. I CPG offrono un approccio interessante per risolvere il problema della generazione della traiettoria on-line usando il comportamento del ciclo limite di oscillatori accoppiati per produrre comandi motori in real time. Il controllo con i CPG permette di rimanere altamente flessibili nel cambiare continuamente velocità, direzione e tipo di
gait[6].
La ricerca della robotica biomimetica, quindi, come evidenziato dall’esempio suddetto, ha come obiettivo di sviluppare una nuova classe di robot ispirati alla biologia che esibiscono, rispetto ai robot odierni, una maggiore robustezza nella performance in ambienti non strutturati. Tale nuova classe di robot possiederà una sostanziale maggior compliance e stabilità e potrà beneficiare dei continui sviluppi in termini di materiali e tecniche di fabbricazione. Le applicazioni includeranno compiti autonomi e semi-autonomi come, per esempio, le operazioni di sminamento per robot piccoli ed ispirati agli insetti e compiti d’interazione con l’uomo per robot ad una scala maggiore [7].
1.2 Embodied intelligence
Recenti sviluppi nel campo della robotica bioispirata sono incentrati sulle nozioni dell’auto organizzazione e dell’embodiment. Quest’ultima nasce dall’evidenza dell’interazione dinamica e reciproca tra cervello (controllo), corpo ed ambiente. Gli studiosi di robotica utilizzano, implicitamente o esplicitamente, una serie di principi ispirati a tale teoria. Per
Fig.1.3 Il robot ha 10 motori a corrente continua che attuano 6 giunti nella spina (1-6) e 4 giunti rotativi per gli arti (7-10)
11
esempio, il comportamento di un sistema dipende dalla nicchia ecologica nella quale il sistema è inserito, dalla sua morfologia e dalle proprietà dei materiali degli elementi che la compongono. E’ facile dedurre che, se la morfologia ed i materiali sono adeguati il controllo sarà molto più semplice, concetto che è stato teorizzato sotto il nome di “ecological balance”[2].
Un esempio di applicazione robotica di tale nozione è rappresentato dal robot Water strider e si basa sul fatto che gli insetti molto piccoli usano la forza della tensione superficiale per supportare il loro peso sull’acqua invece del galleggiamento come fanno i corpi alla macroscala, come illustrato in Fig.1.4.
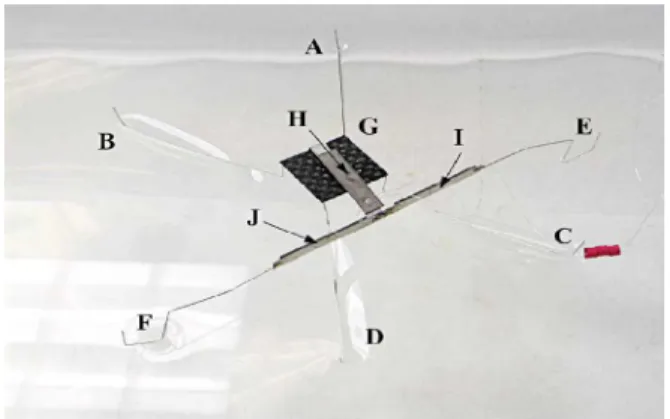
Come si può vedere in Fig. 1.5 devono essere adoperati attuatori multipli per realizzare il movimento di vogata dato che gli attuatori piezoelettrici adoperati hanno solo un grado di libertà. Gli arti (vedi Fig.1.6) sono fili di teflon idrofobico ottimizzati in modo da poter sopportare il peso del robot di 1 g. Nonostante le loro dimensioni è stato dimostrato che dodici di questi arti possono sostenere un payload di 9.3 g [8].
Fig. 1.4 insetto che sfrutta la forza della tensione per stare sull’acqua
Fig.1.5 un prototipo del robot sulla superficie dell’acqua. A B C e D sono gli arti per il supporto, E ed F gli arti attuati, G: corpo con a bordo l’elettronica e la sorgente di potenza, H: attuatore del centro, I e J attuatori destro e sinistro
12
Un altro esempio di questo principio è dato dalla costruzione del robot Geko, in Fig.1.7 L’ispirazione biologica per questo robot delle dimensioni di una mano è stata data dal geco e dalla sua sorprendente abilità nello scalare pareti di ogni tipo. Ognuna delle tre zampe del robot è equipaggiata con materiale asciutto adesivo polimerico che ha caratteristiche del tutto simili al suo analogo biologico. Il robot può sia camminare su pareti lisce verticali sia su superfici invertite[2].
Fig.1.6 l’arto può essere rappresentato come un lungo cilindro sottile e rigido parzialmente sommerso e con un angolo di contatto θ con l’acqua. L’area Ab è proporzionale alla forza di galleggiamento sul cilindro e l’area At è proporzionale alla componente verticale della forza di tensione superficiale
Fig.1.7 Il robot può camminare agilmente sui muri grazie ai materiali di cui è composto
13
Se davvero la funzionalità di un robot è correlata alla sua morfologia sarebbe desiderabile avere dei robot che, a seconda del compito attuale, cambiano forma come illustrato in Fig.1.9. Infatti, ci sono dei robot modulari ed auto-configuranti che possono passare da una struttura quadrupede ad una simile ad un serpente, gli M-Tran [9].
Un modulo M-Tran è composto da due parti (½ cilindrica e ½ cubica) e da un collegamento (vedi Fig.1.8). Ognuna delle tre facce piatte si può connettere meccanicamente e accoppiarsi con la faccia di un altro modulo. Tutte le superfici di connessione hanno un “sesso”: la parte attiva (maschile) si accoppia con la parte passiva (femminile) per un totale di quattro differenti combinazioni. È il modulo stesso che controlla la connessione.
All’interno di questo ambito si colloca anche il principio del cheap design per il quale il disegno deve essere parsimonioso, sfruttare le leggi fisiche ed i vincoli delle nicchie ecologiche. Un esempio di questa applicazione è il passive walker in Fig.1.10: è disegnato per funzionare in discesa, esso sfrutta la dinamica e la morfologia (in particolare la forma e lunghezza del corpo e dei piedi) per arrivare a poter camminare stabilmente.
Fig.1.9 Vari moduli di M-Tran possono formare:una struttura 3D che cambia la propria configurazione, una struttura 3D che genera robot più piccoli, un robot che cambia forma, un robot a più gdl che ha una locomozione flessibile Fig.1.8 morfologia dei moduli dell’M-Tran
14
Si teorizza anche che i vincoli fisici modellino l’interazione del sistema embodied con il suo ambiente. Tale principio può essere sfruttato per ottenere stabilità, manovrabilità ed efficienza energetica. Nelle progettazioni che tengono conto dell’embodied intelligence vengono, inoltre, usati concetti come l’auto-organizzazione e l’emergenza piuttosto che il controllo gerarchico top-down[2].
1.3 Stato dell’arte di bracci robotici
I Continuum Robot sono dispositivi ispirati agli organismi invertebrati che ripropongono strutture anatomiche come le braccia del polpo o le proboscidi degli elefanti. Tali robot, mancando di strutture rigide di sostegno, si prestano bene ad operare in ambienti non strutturati o pieni d’ingombri come edifici crollati, tunnel e aree geografiche sconosciute. Il braccio robotico OctArm è un “Continuum Robot”, un arto robotico con una struttura centrale continua e con mobilità omnidirezionale, in contrasto con i tradizionali robot a link rigidi. OctArm, come si può osservare in Fig. 1.11, si muove grazie ad un impianto pneumatico ad aria compressa[10]. Utilizzando solo 4.13 bar di aria compressa, la sezione distale compie un estensione del 66% e una rotazione di 380° in meno di 0.5 secondi. Tale robot è composto di 4 sezioni, intervallate e legate da 5 supporti discali che forniscono un punto di presa per gli attuatori.
Fig. 1.10 Questo dispositivo riesce a camminare senza possedere motori
15
In ogni sezione sono inseriti 3 attuatori McKibben che gli conferiscono un totale di 12 gradi di libertà. La forma snodata gli permette di avvolgersi agli oggetti, come illustrato in Fig.1.12. Questo robot dimostra, infatti, notevoli capacità di grasping e manipolazione effettuata con l’intero braccio. Chi utilizza il robot può anche controllare i movimenti del braccio robotico grazie al supporto di una telecamera posizionata sull’estremità dell’arto. Il braccio è dotato di sensori tattili che ne ricoprono la struttura e forniscono un feedback dei movimenti compiuti. La lunghezza di ogni sezione del braccio viene misurata dopo aver gonfiato i tre attuatori in una sezione con una certa pressione nota. Da questo si ricava una relazione tra la pressione e la lunghezza e ne viene fatto il fitting con un polinomio del terzo ordine. Si ha così un modo per trasformare le lunghezze degli attuatori desiderate in pressioni. Grazie ad un’equazione per la cinematica inversa è possibile controllare la forma del robot, utilizzando un joystick, per gli algoritmi di grasping dell’intero braccio. Il controllo dell’end-effector si ottiene utilizzando il Jacobiano[11].
Per il manipolatore OctArm è stato presentata anche una combinazione del controllo convenzionale e dell’apprendimento basato su una rete neurale[12].
Fig.1.11 (a) vista semi-trasparente del braccio, (b) foto ravvicinata della base del braccio, (c) vista semi-trasparente della prima sezione, (d) foto del braccio completo
16
Un altro robot degno di nota nel campo dei “Continuum Robot” è Elephant Trunk (proboscide di elefante), sviluppato nell’università di Clemson. Proprio la proboscide dell’elefante, che sfrutta gli stessi principi di movimento dell’arto del polpo, ha ispirato la creazione di questo manipolatore robotico.
Il robot, come si può osservare in Fig.1.13 è composto di 16 sezioni cilindriche, sottili e
ravvicinate che sono collegate tra di loro attraverso giunti prismatici e rotoidali. L’attuazione del robot consiste nella trazione di due cavi ogni 4 sezioni il che implica l’uso di meccanismi di sottoattuazione per tutte le altre sezioni. I gradi di libertà totali sono 32, di
Fig. 1.12 Ci sono dei dispositivi di suzione sulla punta e sui lati di OctArm, simili alle ventose del polpo, che permettono al robot delle capacità di grasping come raccogliere una pallina e sollevare una scatola
Fig. 1.13 L’arto si curva in sezioni con curvatura costante ed è incapace di torsione, il manipolatore ha una struttura più semplice rispetto ad OctArm.
17
cui, quindi, solo 8 attivi. Coppie agonista-antagonista sono formate da diverse molle di richiamo disposte in posizione diametralmente opposta ai cavi.
La ricerca è ora incentrata sulla cinematica inversa del robot e sul path planning.
Interessante risulta anche lo Snake Robot commerciale di OCRobotics in Fig. 1.15, un manipolatore progettato e costruito per accedere in aree altrimenti inaccessibili e per sostituire le procedure manuali nei settori dell’aeronautica e del nucleare. Il braccio robotico ha una lunghezza di 1200 mm, un diametro di 100 mm e uno spazio interno vuoto di 25 mm di diametro. Esso si compone di 10 segmenti, ognuno fornito di 2 gradi di libertà. La progettazione del braccio ha richiesto un’attenta considerazione delle dimensioni, della flessibilità e del carico sopportabile. Solo dopo aver stabilito tali specifiche si è potuto procedere alla progettazione dei link che costituiscono il braccio. Il manipolatore è dotato di attuatori lineari per tirare i cavi e alterna dischi morbidi e rigidi per creare una sorta di spina dorsale pieghevole.
Il braccio ha un solo grado di libertà (pitch) all’end-effector che rende possibile orientarlo in base al compito specifico da eseguire ma l’intero snake-arm può essere rotato intorno al suo
asse maggiore (roll) per permetterne l’orientamento desiderato. Sull’end-effector è possibile montare diversi strumenti illustrati in Fig.1.14.
Il braccio robotico può operare in modo autonomo, in questo modo l’operatore è necessario solo se sorge un problema o per un compito non di routine, semi-automatico, in cui il robot esegue solo una parte dei compiti ed in tele-operazione avvalendosi del feed-back visivo fornito da varie telecamere. Per poter controllare il braccio mentre si muove in spazi chiusi vengono utilizzate le telecamere che identificano delle caratteristiche negli spazi chiusi per
Fig.1.14 strumenti da posizionare all’end effector del robot, il primo serve ad ispezionare, il secondo a sigillare, il terzo a swage
18
controllare il movimento. La cedevolezza del braccio è utile per le collisioni inevitabili e perché sia sicuro per un operatore stare accanto al robot in funzione[13]. Lo snake-arm viene anche utilizzato montato sul robot industriale Kuka, creando così un sistema master-slave che fornisce in tutto 27 gradi di libertà (vedi Fig.1.15).