Vincenzo Marcelletti Indice
Indice
INDICE ... 1
LISTA DELLE FIGURE... 3
LISTA DELLE TABELLE... 5
ABBREVIAZIONI ... 7
CAP. 0 - INTRODUZIONE... 10
CAP. 1 - FISICA DEL NEUTRINO ED EFFETTO CHERENKOV ... 14
CAP. 2 - DESCRIZIONE KM3NeT ... 22
2.1 - DESCRIZIONE PROGETTI PILOTA... 24
2.2 - DESCRIZIONE DEL "DESIGN STUDY KM3NET" ... 27
2.2.1 - Descrizione del WP7 ... 33
2.3 - DESCRIZIONE DEL PROGETTO PILOTA "NEMO"... 34
2.3.2 - Layout Telescopio... 35
2.3.2 - Operazioni marine... 40
2.3.3 - Cavo elettro-ottico... 39
2.3.4 - Stato del progetto Fase 1&2... 42
CAP. 3 - ATTIVITÀ DI TROCINIO E METODOLOGIA ADOTTATA ... 49
3.1 - DESCRIZIONE DELLA METODOLOGIA FMEA/FMECA ... 52
3.1.1 - Caratteristiche dell'analisi FMEA... 56
3.2 – LIVELLI ANALISI FMEA... 58
3.2.1 - Analisi qualitativa... 60
3.2.2 - Analisi quantitativa... 62
3.2.3 - Analisi correttiva ... 64
3.3 - FATTORE DI CRITICITÀ FMECA ... 65
3.4 - ANALISI DEL PROGETTO NEMO ... 66
3.5 - INTEGRAZIONE ATTIVITÀ RA & QA... 67
3.5.1 - Road Map delle Attività RA & QA... 69
CAP. 4 - ANALISI DEL SISTEMA TELESCOPIO "NEMO" ... 71
4.1 – PRE-REQUISITI ANALISI FMEA ... 72
4.2 – SISTEMA TELESCOPIO... 73
4.3 - ANALISI DELLE FUNZIONI... 74
4.3.1 - Descrizione processi operativi principali... 77
4.3.2 - Suddivisione sistema telescopio... 88
4.3.3 - Descrizione funzioni Modulo Ottico ... 105
4.4 - ANALISI QUALITATIVA FMEA DI PROGETTO BENTHOS-SPHERE OM ... 106
4.5 - ANALISI QUANTITATIVA FMEA DI PROGETTO BENTHOS-SPHERE OM... 108
4.5.1- FMEA di progetto quantitativa... 111
ALLEGATO A ARCHIVIO DATI... 119
ALLEGATO B - PRESENTAZIONE METODOLOGIA RIUNIONE SAN PIERO ... 132
ALLEGATO C - PRESENTAZIONE WP7 & ROAD MAP SGQ ... 138
ALLEGATO D - MINUTE RIUNIONE 20/03/2006 ... 147
ALLEGATO E - QUESTIONARIO RA&QA ... 152
Vincenzo Marcelletti Lista delle figure
Lista delle figure
Capitolo 1
1.1 “Propagazione delle particelle”
1.2 “Rilevazione dei neutrini”
1.3 “Flusso dei neutrini in funzione dell’energia”
1.4 “Effetto Cherenkov”
1.5 “Simulazione cono di luce Cherenkov nelle Profondità marine”
1.6 “NEMO nel Porto di Capo Passero”
Capitolo 2
2.1 “Siti esplorati dalla collaborazione NEMO
2.2 “Flusso integrale di muoni atmosferici in funzione della
profondità. Sono evidenziate le profondità dei rivelatori proposti ed in costruzione”
2.3 “Elemento ottico di un fotomoltiplicatore”
2.4 “Struttura dell’esperimento Fase 1”
2.5 “1° Layout proposto per il telescopio NEMO”
2.6 “2° Layout proposto per il telescopio NEMO”
2.7 “Torre di Nemo”
2.8 “Collegamenti interni di una torre.”
2.9 “Shore Station”
2.10 “Cavo Eletro-Ottico Principale”
2.11 “Laboratorio sottomarino”
2.12 “Branching Unit”
2.13 “Frame-JB-TW”
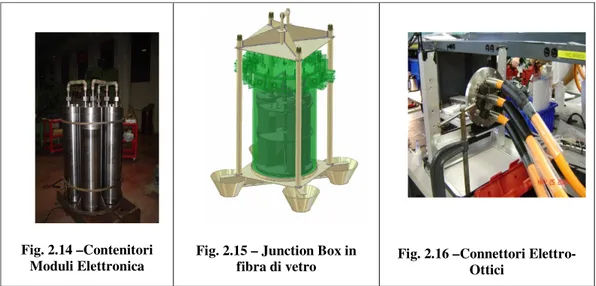
2.14 “Contenitori Moduli Elettronica”
2.16 “Connettori Elettro-Ottici”
2.17 “Mini-Tower chiusa”
2.18 “Mini-Tower Unfurled”
2.19 “NEMO-SN1”
Capitolo 3
3.1 “Interazioni causa-modo-effetto tra i diversi livelli di dettaglio”
3.2 “Layout Worsheet Format elaborato per la FMEA di
progetto”
3.3 “Layout Worsheet Format elaborato per la FMEA di
processo”
3.4 “Matrice indice di criticità.”
Capitolo 4
4.1 “Sistema telescopio”
4.2 “Periodi vita sistema telescopio”
4.3 “Sistema Telescopio / Modulo Ottico / Missioni”
4.4 “Modulo Ottico”
4.5 “Diagramma a blocchi funzionale sistema meccanico
Vincenzo Marcelletti Lista delle tabelle
Lista delle tabelle
Capitolo 3
3.1 “Worksheet Format: individuazione della terna Causa-
Guasto-Effetto da sottoporre all’analisi Quantitativa”
3.2 “Schematizzazione dell’analisi delle cause.”
3.3 “Indice di Occurrence”
3.4 “Indice di Severity”
3.5 “Indice Detection”
Capitolo 4
4.1 A
“Evoluzione verticale dei due principali Processi
durante il periodo di “vita utile” ”
4.1 B
“Evoluzione verticale dei due principali Processi
durante il periodo di “vita iniziale” “
4.2 A “Descrizione dei processi-sottoprocessi-operazioni
durante il periodo di “vita utile” del Sistema di
Rilevamento e del Sistema di Gestione e Controllo delle infrastrutture”
4.2 B
4.3 “Suddivizione telescopio in Unit/
Sub-unit/Element/Item e descrizione delle funzioni.”
4.4 “Uscite Funzionali e interrelazioni causa/modo/effetto
tra i due livelli Element-Item”
4.5
“FMEA di Progetto qualitativa”
4.6
“Indice di Occurrence”
4.8
“Indice di Severity”
VincenzoMarcelletti Abbreviazioni
Abbreviazioni
BU Branching Unit
CDR Conceptual Design Report
CNR Centro Nazionale di Ricerca
DAQ-Board Data Acquisition Board
DIMNP Dipartimento di Ingegneria Meccanica, Nucleare e della
Produzione
DWDM Dense Wavelength Division Multiplexing
ESONET European Seafloor Observatory Network
Ev Electron Volts
FCM Floor Control Module
FCMI Floor Control Module Interface
FIFO First Insert First Out
FMEA Failure Mode and Effects Analysis
FMECA Failure Mode Effect Criticality Analysis
Gbps Giga Byte per secondo
GRBs Gamma Ray Bursts
HVCnt High Voltage Control
HVI High Voltage Interface
HVMon High Voltage Monitor
HVPSU High Voltage Power System Unit
INFN Istituto Nazionale di Fisica Nucleare
INGV Istituto Nazionale di Geofisica e Vulcanologia
ISCTI Istituto Superiore delle Comunicazioni e delle Tecnologie
JB (o JBP) Primary Junction Box
JBS Secondary Junction Box
JTAG/ONCE Joint Test Action Group/On Chip Emulator
KHz Kilo Hertz
KM3NeT Kilometer cube Neutrinos Telescope
LNS Laboratori Nazionali del Sud
LVDS Low Voltage Differential Signaling
Mbps Megabite per sec.
MEOC Main Electro-Optical Cable
OGS
OM Optical Module
OSD Occurrence Detection Severity
PFCM Power Floor Control Module
PMT Photo-MultiPlicator
PMTI Photo-MultiPlicator-Interface
QA Quality Assurance
RA Risk Assessment
R&D (RD) Research & Development
ROV Remote Operating Vehicle
RPN Risk Priority Number
SCM Slow Control Module
SDH Synchronous Digital Hierarch
SGQ Sistema di Gestione della Qualità
SN-1 Station North One
SS Shore Station, Stazione di Terra
VincenzoMarcelletti Abbreviazioni
TSN Terminal Station North
TSS Terminal Station South
VLVnT Very Large Volume neutrinos telescope
CAPITOLO 0
Introduzione
L’attività di tirocinio è stata svolta durante la fase iniziale della collaborazione tra DIMNP (Dipartimento di Ingegneria Meccanica, Nucleare e della Produzione sede di San Piero a Grado) e INFN (Istituto Nazionale di Fisica Nucleare) di Pisa nell’ambito del Progetto KM3NeT. Questo progetto è nato dall’esigenza di realizzare un telescopio sottomarino, di un Chilometro cubo di rilevatori foto-sensibili, per l’individuazione dei neutrini provenienti dalle regioni più lontane dell’intero universo.
Le tre collaborazioni che partecipano alla realizzazione del telescopio sono: NEMO, ANTARES, NESTOR; ognuna di esse ha concepito delle soluzioni alternative, ed ha individuato dei siti che potrebbero ospitare un telescopio di cosi grande volume.
I neutrini ad alta energia sono prodotti in sorgenti astrofisiche lontane, e sono particelle elementari privi di carica e capaci di interagire solo tramite interazioni deboli. Proprio per queste caratteristiche possono giungere sulla Terra senza subire deviazioni, si prestano pertanto ad indagini di tipo astrofisico.
La distribuzione spettrale ed il flusso dei neutrini originati in sorgenti astrofisiche dipende fortemente dai processi che caratterizzano le sorgenti stesse. L’interazione di “corrente carica” di neutrini muonici dà origine a leptoni : lo studio delle proprieta’ cinematiche di tali particelle, se veramente dovute ad interazioni di neutrini astrofisici, puo’ fornire informazioni sui flussi di neutrino da sorgenti lontane.
Attribuire un all’interazione di un neutrino astrofisico non è però semplice, infatti i muoni sono prodotti copiosamente nell’atmosfera. Tali muoni sono distribuiti isotropicamente e sono caratterizzati da uno spettro di energia, che segue una legge di potenza del tipo N (E)=N0 E-3, che decresce molto più rapidamente di quello dei neutrini astrofisici al crescere dell’energia. Si stima che per energie > 1/10 TeV i neutrini di origine astrofisica dovrebbero essere in numero superiore dei neutrini originati nell’atmosfera: l’identificazione di neutrini con E >1/10 TeV potrà permettere l’ “Astronomia con Neutrini”, l’apparato potrà essere considerato un “Telescopio per Neutrini”. In tale regione dello spettro i flussi di neutrini astrofisici sono estremamente deboli tanto che per poter raccogliere in un anno un numero di eventi statisticamente significativo sarà necessario un rivelatore di dimensioni enormi, con un’area
CAPITOLO 0 Introduzione
atmosferici, e quindi rendere più agevole lo studio dei neutrini astrofisici, si può usare l’effetto “frenante” della materia. Il “Telescopio per Neutrini” non potrà essere alloggiato in un tunnel o in una miniera, dovrà essere immerso in fondo al mare, ad una profondità tale (> 3000m) che il flusso dei muoni atmosferici è ridotto, rispetto alla superficie, di un fattore pari a ~106. Muoni relativistici nel propagarsi in acqua provocano la produzione di fotoni Cherenkov (circa 200 fotoni per ogni cm di traccia); la componente di tale radiazione contenuta nell’intervallo di frequenza ~370/470nm riesce a propagarsi in acqua per decine di metri permettendo la rivelazione del passaggio del muone anche da parte di un apparato composto da rivelatori di fotoni posti distanti uno dall’altro. L’acqua quindi, oltre a frenare muoni di bassa energia, assume anche il ruolo di “radiatore” per l’apparato di rivelazione composto essenzialmente da “fotomoltiplicatori”. Il muone si muove su una direzione molto simile a quella del neutrino. La ricostruzione della direzione del muone potrà quindi permettere di attribuire una direzione di provenienza al neutrino che l’ha originato. Per tale motivo è estremamente importante ricostruire con la massima accuratezza la direzione di volo del muone, possibilmente rivelando la massima parte del suo cammino in acqua: il telescopio per neutrini non dovrà quindi avere solo una grande “area efficace” (~ 1km2) , dovrà avere anche uno “spessore” tale da poter campionare opportunamente la traccia di un muone (E ~1 TeV) che lo attraversi. Il “Telescopio per Neutrini” astrofisici di alta energia dovrà quindi estendersi per almeno “1km3”, essere localizzato in un sito sottomarino a profondità maggiore di 3000m, equipaggiato con sensori capaci di raccogliere segnali luminosi estremamente deboli (singoli fotoni), connesso a riva da cavi e fibre ottiche per la trasmissione dei dati e dell’energia necessaria alla alimentazione dell’apparato sperimentale.
Le problematiche connesse ad un siffatto apparecchio sono molteplici, e partono dalla configurazione architettonica idonea, che dovrà essere concepita tenendo in considerazione non solo i parametri di merito del telescopio (area efficace e risoluzione angolare), ma anche dinamiche che vanno ad interessare la realizzazione fisica delle infrastrutture necessarie e lo schieramento nei fondali marini dell’apparecchio, fino ad arrivare al rispetto dei vincoli tecnologici e meccanici che un ambiente sottomarino comporta (es: pressione, corrosione, ecc...). Altre problematiche inerenti la realizzazione e funzionalità del telescopio sono da attribuire all’impossibilità di poter intervenire, al verificarsi di eventuali guasti, una volta che le infrastrutture saranno posizionate a più di 3000 metri di profondità. Alla luce di ciò l’Analisi dei Rischi riveste un ruolo fondamentale per lo studio di fattibilità di un progetto di tale complessità.
Proprio per queste esigenze le tre collaborazioni hanno unito le loro sinergie istituendo un Design Study per la realizzazione del KM3NeT, che ne comprovasse l’effettiva fattibilità e ne garantisse la riuscita. A tale scopo sono stati istituiti dei pacchetti di lavoro (WP), organizzati in relazione alle problematiche progettuali da affrontare.
L’INFN di Pisa, avvalendosi della collaborazione del DIMNP, si è proposta di realizzare (all’interno del WP7) l’Analisi dei Rischi e la Garanzia della Qualità del KM3Net, con particolare riferimento alla soluzione progettuale della collaborazione NEMO.
Lo scopo durante il mio tirocinio, presso il DIMNP di San Piero a Grado, è stato quello di svolgere gli studi preliminari per ottenere l’Analisi dei Rischi del progetto pilota NEMO.
I passi compiuti in tal senso hanno riguardato la raccolta di tutti i dati possibili in relazione al progetto succitato e degli altri due progetti pilota connessi al Design Study.
Questa fase è stata seguita da un’organizzazione del materiale in base alle argomentazioni trattate, per poi poterlo attribuire ad i vari campi di indagine (es: sistema di rilevamento, trasmissione dati, ecc...).
Una volta organizzato il materiale sono state effettuate operazioni in funzione della metodologia scelta per l’analisi dei rischi, nel nostro caso si è scelta l’Analisi Critica dei potenziali Modi di Guasto e dei suoi Effetti (FMEA/FMECA), in quanto questa metodologia si presta bene all’analisi di progetti sperimentali; si è cosi avviata l’analisi del Sistema Telescopio NEMO, cercando di individuare e raggruppare tutti i processi che avvengono per la realizzazione e per la funzionalità operativa dell’apparecchio.
Si sono identificati cosi tre sistemi principali: Sistema Meccanico delle Infrastrutture, Sistema di Rilevamento e Sistema di Gestione e controllo delle Infrastrutture, questi sistemi sono stati divisi spazialmente in operazioni da effettuare a riva, ed operazioni da effettuare in mare, e temporalmente nei periodi di vita del telescopio (iniziale, in esercizio oppure di fine vita). Per ogni sistema si è individuata una missione concettuale e/o tecnologica, in relazione al tempo di vita ed alle operazioni da effettuare “on-shore” oppure “off-shore”.
Lo scopo di questo lavoro è stato attribuire tutte le funzionalità ai vari componenti. Di fatti a seguito di questa analisi è stata redatta una tabella che scompone ad albero le 4 unità principali costituenti il telescopio, descrivendo le funzionalità di ognuno di essi e numerandoli, in modo da poterne attribuire l’appartenenza.
CAPITOLO 0 Introduzione
Alla fine del lavoro è stata redatta, a titolo di esempio, una tabella quantitativa FMEA, in modo da identificare sequenze incidentale di guasto in riferimento alla Benthos Sfera del Modulo Ottico durante il periodo di “vita utile”.
Si sono cosi quantificati gli indici di priorità di rischio (RPN), da far interagire con le azioni correttive suggerite per limitarne il valore.
Una volta che si saranno completate tutte le tabelle relative a tutti i componenti dei sistemi, in rapporto alla loro missione ed al loro periodo di vita, si passerà alla quantificazione delle categorie di rischio (da marginale a catastrofico), cosi da poter validare le scelte tecnologiche e meccaniche nell’ambito dello studio di fattibilità, della proposta di telescopio NEMO.
Nell’ambito della predetta attività, lo scrivente è stato responsabile dei seguenti compiti: A) archiviazione ed organizzazione delle informazioni;
B) suddivisione del sistema telescopio; C) individuazione processi e missioni; D) analisi delle funzioni del OM;
E) redazione tabella FMEA qualitatitiva e quantitativa; F) valutazione indici ODS.
CAPITOLO 1
Fisica del neutrino ed effetto cherenkov
Le nostre conoscenze dell’Universo si basano principalmente sullo studio della radiazione elettromagnetica con la rivelazione di segnali caratterizzati da lunghezze d’onda che vanno dalle onde radio a fotoni di altissima energia. Fotoni di alta o bassa energia, elettricamente neutri e quindi non deviati dai campi magnetici galattici, consentono l’individuazione delle regioni dove sono stati generati ed in generale ne permettono lo studio dettagliato delle proprietà chimiche e fisiche. Tuttavia regioni dense, come il centro delle stelle o i nuclei galattici attivi che vengono attualmente considerati fra i più importanti “motori” di accelerazione delle particelle elementari, sono opachi alla radiazione elettromagnetica e non possono essere studiati con questo strumento. Infatti la radiazione elettromagnetica di alta energia (102TeV<E <108TeV) non riesce a giungere fino a noi a causa dell’assorbimento causato dalla presenza della radiazione cosmica di fondo che permea l’intero Universo, per i fotoni l’interazione dominante è con il fondo di microonde. Questo assorbimento limita l’orizzonte osservabile con gamma di alta energia a circa 500 milioni di anni luce.
Qualche altra informazione ci giunge per mezzo dei raggi cosmici: protoni o nuclei atomici più pesanti. Queste particelle però sono cariche e subiscono l’effetto dei campi magnetici presenti nella galassia e negli spazi intergalattici che ne deflettono le traiettorie impedendoci di identificare il loro punto di origine.
Quello che è necessario per sondare le profondità dell’universo è uno strumento che sia in grado di vedere particelle che non sono influenzate dal gas, dalle polveri, dalla radiazione elettromagnetica di fondo e dai campi magnetici che incontrano nel loro viaggio verso di noi. L’unico candidato conosciuto che risponda a tutti questi requisiti è il neutrino. Questa particella neutra interagisce solo debolmente con la materia e può così arrivare indisturbata direttamente dalla sorgente a noi viaggiando ad una velocità prossima a quella della luce.
La realizzazione di un telescopio per neutrini di alta energia permetterebbe di estendere la distanza accessibile all’osservazione di svariati ordini di grandezza, permettendo di studiare oggetti e fenomeni ai limiti dell’universo, prodotti a tempi prossimi al Big Bang.
A causa della bassa probabilità di interazione del neutrino con la materia, la rivelazione dei neutrini è estremamente difficile e richiede rivelatori di grande volume.
CAPITOLO 1 Fisica del neutrino ed effetto Cherenkov
Fig. 1.1 Propagazione delle particelle
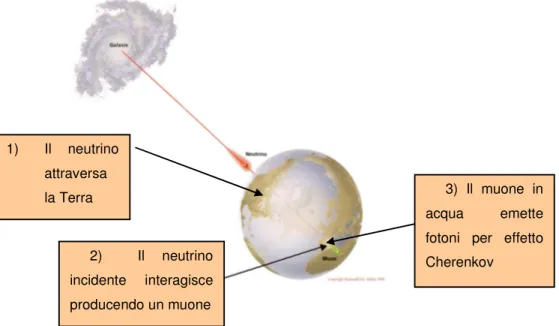
Le stime dei flussi di neutrini attesi stabiliscono che per poter affrontare il problema dell’astronomia con neutrini d’alta energia è necessario un rivelatore con un’area sensibile di almeno un km2. La necessità di ricostruire la traccia del muone (prodotto dall’interazione del neutrino con la materia), unita a quella di avere un’area sensibile dell’ordine di un km2, impone di avere una struttura “tridimensionale” con lato di circa un km: da qui il nome km3 o “chilometro cubo” con cui questo rivelatore viene convenzionalmente nominato. Il metodo che sembra più promettente per la rivelazione dei neutrini è l’identificazione dei muoni prodotti dall’interazione dei neutrini nel rivelatore.
Fig. 1.2 Rilevazione dei neutrini 1) Il neutrino attraversa la Terra 2) Il neutrino incidente interagisce producendo un muone 3) Il muone in acqua emette fotoni per effetto Cherenkov
Propagazione delle particelle
Propagazione delle particelle
I muoni sono particelle cariche molto penetranti e sufficientemente pesanti (200 volte la massa di un elettrone) da non perdere tutta la loro energia per via di emissioni elettromagnetiche. I muoni prodotti nelle interazione di corrente carica di (neutrini muonici) hanno la caratteristica di perdere energia essenzialmente per ionizzazione e quindi di potersi propagare per “lunghi percorsi” nel “volume sensibile” di un eventuale detector. A titolo di esempio il percorso medio di un muone di 10 GeV in acqua è pari a circa 40m. Un elettrone della stessa energia, originato nell’interazione di e, darebbe luogo ad uno sciame elettromagnetico che propagherebbe solo per qualche metro. Volendo ricostruire la “direzione” di provenienza dei neutrini astrofisici tramite lo studio delle caratteristiche cinematiche dei leptoni da essi originati, è evidente che le migliori condizioni sperimentali sono possibili per i .
I muoni originati dai vanno però distinti da quelli, molto più numerosi, originati negli sciami elettromagnetici, prodotti dalle interazioni dei raggi cosmici adronici (protoni e nuclei) con l’atmosfera. Il flusso dei muoni atmosferici è cento miliardi di volte (1011) più intenso di quello atteso dai muoni prodotti da neutrini astrofisici.
Fig. 1.3 Flusso dei neutrini in funzione dell’energia !
"
CAPITOLO 1 Fisica del neutrino ed effetto Cherenkov
Un rivelatore, posto per esempio al livello del mare, non schermato dal flusso di muoni atmosferici, sarebbe “accecato” da queste particelle e non potrebbe distinguere i segnali di interesse astrofisico. Questa è la ragione per cui i rivelatori per neutrini devono essere collocati a grandi profondità sotto terra dove gli spessi strati di roccia sovrastanti riducono fortemente l’intensità del flusso di muoni atmosferici.
Questa soluzione è ovviamente improponibile per un rivelatore delle dimensioni di un “chilometro cubo”. Il modo più efficace per ovviare al problema è costruire il rivelatore nelle profondità delle fosse marine abissali. Un apparato sottomarino realizzato a grande profondità permette di risolvere efficacemente ed elegantemente buona parte dei problemi sperimentali per l’astronomia con neutrini:
- con l’acqua marina è possibile realizzare un ottimo, ed economico, “rivelatore Cherenkov” per particelle cariche relativistiche
- il rivelatore può assumere la geometria più opportuna per la rivelazione delle tracce raggiungendo facilmente “volumi ed aree sensibili” di enormi proporzioni (km3, 104÷106 m2) - un rivelatore sottomarino a ~3500m di profondità è naturalmente schermato rispetto alla radiazione di origine atmosferica: il flusso di muoni si riduce di circa 6 ordini di grandezza rispetto a quello presente alla superficie del mare.
- Inoltre costituisce un mezzo trasparente in cui si produce e propaga il segnale Cherenkov Infatti se il muone prodotto si propaga a velocità superiore a quella della luce in acqua esso genera, con un meccanismo detto effetto Cherenkov simile a quello che porta al “bang” caratteristico di un jet che supera la velocità del suono, un fronte luminoso con un angolo ben determinato rispetto alla sua direzione di moto. L’angolo Cherenkov in acqua è di circa 42° per la radiazione visibile.
Equipaggiando grandi volumi d’acqua (o ghiaccio) con sensori capaci di rivelare segnali luminosi anche debolissimi, si può identificare la traccia del muone. Poiché i muoni di altissima energia si propagano per distanze dell’ordine del km con direzione prossima a quella del neutrino che li ha generati, e ne trasportano in media il 50-60% dell’energia, identificare una traccia di muone permette di risalire alle informazioni sul neutrino incidente.
Nonostante l’enorme spessore d’acqua che lo scherma, alcuni dei muoni atmosferici possono ancora raggiungere il rivelatore, dando origine ad un segnale indistinguibile da quello generato da un neutrino. La soluzione a questo problema sta nel cercare quei segnali che provengono dalla direzione che è schermata dall’intero spessore della Terra. Solo i neutrini, infatti, possono attraversare indisturbati un tale spessore di materia e interagire in prossimità del rivelatore. La peculiarità di un siffatto telescopio per neutrini è quindi che esso invece di guardare verso “l’alto”, come gli strumenti astronomici a cui siamo abituati, guarderà solo verso il “basso”.
La luce Cherenkov
profondità marine
La luce Cherenkov
profondità marine
Fig. 1.5 Simulazione cono di luce Cherenkov nelle Profondità marine
Pertanto solo una parte della volta celeste sarà accessibile ad un telescopio collocato nell’emisfero boreale, ed un’esplorazione completa del cielo sarà possibile solo se questo strumento sarà complementato da uno analogo nell’altro emisfero. Il vantaggio di essere collocato nell’emisfero nord è che esso potrà guardare alla parte di cielo che contiene la maggior parte delle sorgenti più interessanti tra cui il centro della nostra galassia.
CAPITOLO 1 Fisica del neutrino ed effetto Cherenkov
energie superiori a 10 TeV, sia maggiore del rumore di fondo. In particolare, l’identificazione di muoni con traiettorie dirette dal fondo del mare verso la superficie, è un chiaro segnale di un evento prodotto da un’interazione di neutrino avvenuta in prossimità del rivelatore.
Nonostante l’idea di realizzare un telescopio sottomarino per neutrini risalga agli anni ‘60 solo oggi le tecnologie necessarie per l’impresa sono disponibili ed il progetto risulta realizzabile. Nel Mediterraneo è in corso un’attività di Ricerca & Sviluppo da parte della collaborazione NESTOR in Grecia, mentre la collaborazione ANTARES, che coinvolge ricercatori di Francia, Italia, Olanda, Spagna, Gran Bretagna e Russia ha realizzato un apparato dimostratore da un decimo di km2, immerso al largo di Tolone ad una profondità di 2400 m. I ricercatori di ANTARES e NEMO hanno collaborato inoltre ad un’attività di caratterizzazione dei siti e di Ricerca & Sviluppo in vista della realizzazione del rivelatore km3.
L’apparato sperimentale NEMO sarà costruito a più di 3000m di profondità nel Mediterraneo, nella zona a circa 80km a SE di Capo Passero, vicino alle coste della Sicilia.
Fig. 1.6 NEMO nel Porto di Capo Passero
Come già detto il processo fisico utilizzato per tracciare il muone è basato sull’effetto erenkov. Un muone, di energia superiore a ~51MeV, che attraversi il rivelatore emetterà lungo la sua traiettoria dei fotoni lungo un cono (cono di luce erenkov) la cui apertura è, in prima approssimazione, solo funzione dell’indice di rifrazione del mezzo. Misurando con un array di fototubi la posizione ed il tempo di arrivo dei fotoni erenkov sarà possibile ricostruire la traccia
del muone (almeno 5 informazioni sono necessarie per risolvere univocamente il problema della ricostruzione della traccia del muone). Dopo una lunga fase di studio delle prestazioni del “telescopio per neutrini” come funzione della geometria di posizionamento dei fotomoltiplicatori (PMT), la Collaborazione NEMO propone attualmente di realizzare un apparato sperimentale costituito da 64 torri (oppure 81), un cavo elettro-ottico, lungo circa 80Km, connetterà l’apparato alla stazione di ricezione sulla costa. Questo cavo provvederà sia ad alimentare l’apparato sia, tramite delle fibre ottiche, al trasporto dei dati opportunamente messi in forma digitale. L’utilizzo delle fibre ottiche per l’invio dei dati consentirà di trasportare in tempo reale tutti i segnali acquisiti dall’apparato con l’ovvio vantaggio di non dover implementare alcun tipo di selezione dei dati (“trigger hardware”) ancora in acqua, con un’elettronica posizionata in prossimità dei PMT stessi. Con uno strumento di questo tipo saranno sufficienti pochi segnali, generati in differenti fotomoltiplicatori, di cui si conoscano con precisione la posizione ed il tempo di formazione per ricostruire la traccia del muone. La stima dell’energia dei muoni (e quindi dei neutrini che li avranno generati) sarà più difficoltosa e richiederà tecniche differenti a seconda delle caratteristiche della traccia misurata. Nel caso in cui la traccia del muone sarà interamente compresa nell’apparato sarà possibile una misura accurata (entro il 20%) della sua energia. In caso contrario sarà sempre possibile stimare un limite inferiore per la sua energia e, mediante alcune caratteristiche degli sciame elettromagnetici prodotti dal muone, anche la sua energia totale con un errore dell’ordine del 100%.
Le possibili fonti di rumore in un apparato cosi concepito, sono da ricercare in quei fenomeni fisici differenti dalle interazioni dei neutrini, astrofisici o atmosferici, che generino fotoni nel campo di sensibilità dei fotomoltiplicatori utilizzati (300-650nm ). Un’enorme sorgente di “rumore” è, come detto, costituita dal flusso di muoni atmosferici, da ciò risulta evidente l’importanza di una corretta distinzione, in fase di ricostruzione della traccia, tra muoni provenienti da sopra o da sotto l’apparato; anche una piccola percentuale di errore nel discriminare questi due casi porterebbe il segnale fisicamente interessante (le tracce provenienti “dal basso”) ad essere indistinguibile dal fondo. Un apparato erenkov sottomarino é inoltre soggetto a due tipi di “rumore” di origine completamente differente: i decadimenti delle sostanze radioattive disciolte nell’acqua marina e la bioluminescenza. I decadimenti delle sostanze radioattive, di cui il maggior contributo é dovuto al 40K, generano particelle cariche (elettroni) che, se sopra soglia, producono luce erenkov. Sebbene questi decadimenti siano sostanzialmente puntiformi e quindi non rischiano di essere identificati come tracce “lunghe” dovute a muoni energetici, sono nondimeno diffusi in tutto l’apparato ed hanno una frequenza
CAPITOLO 1 Fisica del neutrino ed effetto Cherenkov
diminuisce notevolmente considerando che per ricostruire le tracce delle particelle cariche estremamente energetiche si impongono coincidenze temporali tra i segnali dei vari fotomoltiplicatori; ciò diminuisce considerevolmente la probabilità di “allineamenti temporali” casuali fra segnali di diversi PMT dovuti a questo tipo di fondo. La conoscenza di questo rumore rimane in ogni caso di primaria importanza sia nella fase di simulazione e test delle varie tecniche di ricostruzione delle tracce sia nella rivelazione di Supernovae galattiche. In questo caso infatti i neutrini sono troppo poco energetici per essere tracciati ed il loro passaggio viene evidenziato da un aumento della frequenza di segnali misurata da ciascun fotomoltiplicatore. La bioluminescenza viene prodotta da alcuni tipi di batteri presenti alle profondità dell’apparato che emettono luce con una intensità compatibile a quella di una sorgente di singoli fotoni ma con una frequenza che può essere anche più di due ordini di grandezza superiore a quella dovuta ai decadimenti delle sostanze radioattive. Il meccanismo più comune di eccitazione della bioluminescenza é la stimolazione meccanica: il microrganismo emette luce quando è investito da un’onda di pressione (che potrebbe essere generata da un pesce in avvicinamento). Tuttavia sono stati appurati anche altri meccanismi di eccitazione indotti da campi elettrici, da alcune sostanze chimiche e dall’emissione stessa di luce. Il tipo di segnale generato da questi batteri su di un singolo fotomoltiplicatore é indistinguibile, per forma e spettro in ampiezza, da quello generato dai fotoni erenkov. Non è ancora chiaro se sia un effetto originato in una zona spazialmente piccola, rispetto alla distanza media dei fotomoltiplicatori né quali siano le sue variazioni nell’arco dell’anno. Il suo effetto su di un apparato come quello che si intende costruire per l’esperimento NEMO é quello di rendere inutilizzabile per un periodo di tempo (che può variare da s ad alcuni secondi) la parte dell’apparato interessata dal fenomeno. Di questo effetto bisogna ovviamente tenere conto nel calcolo del tempo morto dell’apparato. Per tutte queste problematiche sopra esposte la prima attività delle collaborazioni ANTARES, NEMO e NESTOR per la realizzazione del “km3” è stata la caratterizzazione del sito. Le tre collaborazioni difatti hanno unito gli sforzi in tal senso organizzandosi in un Design Study che ha avuto il suo effettivo inizio nel 2002.
CAPITOLO 2
Descrizione KM3NeT
KM3NeT è un progetto europeo che coinvolge circa 8 nazioni e 30 istituzioni allo scopo di realizzare un’infrastruttura sottomarina di ricerca scientifica che ospiterà un telescopio di neutrini. I fotorilevatori del telescopio dovranno coprire una dimensione volumetrica di circa un chilometro cubo e vanno istallati nelle profondità del Mar Mediterraneo. Lo scopo è di rilevare i neutrini da fonti astrofisiche “distanti”, come i GRBs (Gamma Ray Bursts), le Supernovae o le Microquasar e costituirà un potente mezzo per la ricerca della materia oscura dell’universo. I due fondamentali fattori di merito per caratterizzare le performance di un telescopio sono: l’area efficace e la risoluzione angolare. La determinazione dell’area efficace permette di stimare il numero di muoni rilevabili per un dato flusso di muoni incidenti. La risoluzione angolare definisce la capacità del rilevatore di identificare le sorgenti puntiformi. Vediamo brevemente questi due parametri.
L’area efficace Aeff per un telescopio di neutrino è definite come l’area di un equivalente rilevatore bidimensionale che abbia un’efficienza di rilevazione
=1
(rapporto tra muoni ricostruiti e muoni che attraversano il rilevatore). L’ Aeff dipende fortemente dall’energia del muone e dalla direzione del muone, e si può esprimere come il rapporto tra il numero di particelle rilevate per unità di tempo e il flusso incidente. L’area efficace può essere stimata mediante le simulazioni Monte Carlo e sarà in questo caso espressa da una relazione che la lega all’area geometrica proiettata sul piano ortogonale alla direzione del muone e l’efficienza di rilevazione.
La risoluzione angolare è una funzione statistica che dipende dalla capacità del rilevatore di identificare la direzione del neutrino incidente dalla ricostruzione della traccia del muone indotto dal neutrino stesso. Essa è la combinazione dell’angolo tra il neutrino ed il muone e l’angolo tra la direzione effettiva del muone e quella ricostruita dal rilevatore, che dipenda dalla geometria del rilevatore e dalla bontà dell’algoritmo di ricostruzione.
CAPITOLO 2 Descrizione KM3NeT Questo telescopio cercherà i segnali dovuti al passaggio di neutrini provenienti dall'emisfero sud
e sarà complementare al progetto americano denominato AMANDA-ICECUBE che controllerà invece i neutrini provenienti dall’emisfero nord.
L’idea di istituire uno studio sulla progettazione (Design Study KM3Net) di un siffatto telescopio è nato all’interno delle collaborazioni di tre progetti pilota NEMO-ANTARES-NESTOR.
ANTARES è un progetto di iniziativa francese a cui collabora anche l’Italia e che prevede un rivelatore di dimensioni molto più contenute disposto al largo di Tolone. NESTOR, il primo fra i progetti europei, è stato promosso dalla Grecia.
2.1 Descrizione progetti pilota km
AMANDA-IceCube:
AMANDA è una collaborazione americana nata agli inizi degli anni ’90, allo stato attuale, denominato AMANDA II, l’apparato è costituito da 667 moduli ottici (OM) orientati verso il basso e montati su 19 stringhe verticali poste ad una profondità compresa fra i 1300 e i 2400 m, ed è schermata dai muoni atmosferici da uno spessore di ghiaccio. Ice-Cube è l’estensione di AMANDA alle dimensioni di un km3 . Quando sarà completato (data prevista 2010) consterà di 4800 PMT (fotomoltiplicatori) orientati verso il basso e disposti in 80 stringhe. IceCube sarà in grado di identificare le tracce dei muoni prodotti da neutrini muonici con energia > 100 GeV e sciami prodotti da neutrini elettronici con energie >10TeV e da neutrini tauonici con energie > 1PeV.
NESTOR:
La collaborazione NESTOR, la prima ad aver iniziato gli studi di fattibilità del telescopio km3 nel Mar Mediterraneo, propone la costruzione di un rilevatore “modulare” a 3800 m di profondità in prossimità delle coste del Peloponneso (Grecia): ogni torre è una struttura semi-rigida alta 360 m e 32 m di diametro equipaggiata da circa 170 PMT orientati sia verso il basso che verso l’alto. Nel marzo del 2003 è stato posizionato un piano di torre con 12 moduli ottici e di 12 m di diametro alla profondità di 3800 m, in modo da testare le performance dell’apparato e in particolare il sistema di acquisizione dati. Esso ha acquistato rumore ottico sottomarino e segnale di muoni cosmici per circa un mese. Dai dati acquisiti in questo intervallo di tempo sono state ricostruite le tracce di 745 muoni atmosferici.
ANTARES:
La collaborazione è impegnata nella costruzione di un apparato dimostratore con superficie di 0.1 km2 in questo sito sottomarino vicino Tolone (Francia) a 2400 m di profondità. L’apparato è costituito da 12 stringhe verticali equipaggiate con un totale di 74 PMT orientati verso il basso a 45° rispetto alla verticale, in modo da ridurre l’oscuramento dovuto alla crescita biologica e alla sedimentazione. Dopo una prima messa in opera di 2 stringhe nella primavera del 2003, da aprile 2005 una nuova versione instrumentata con sensori oceanografici e moduli ottici sta prendendo dati. I dati raccolti sino ad ora mostrano un inaspettato valore di rumore ottico compreso tra 60 e
CAPITOLO 2 Descrizione KM3NeT spiegabile con fenomeni di decadimento radioattivo del 40K. Questo effetto potrebbe limitare le
capacità di rilevazione di ANTARES.
NEMO (NEutrino Mediterranean Observatory):
La collaborazione italiana è la più giovane delle tre, attualmente la collaborazione comprende: • INFN (Istituto Nazionale di Fisica Nucleare) delle sezioni di Bologna, Bari, Cagliari, Catania, Genova, Messina, Roma e Pisa;
LNS (Laboratori Nazionali del Sud);
• INGV (Istituto Nazionale di Geofisica e Vulcanologia); • CNR (Consiglio Nazionale delle Ricerche), in particolare: – Istituto di Oceanografia Fisica (La Spezia);
– Istituto di Biologia del Mare (Venezia); – Istituto Talassografico (Messina); – Istituto GEOMARE-SUD (Napoli).
• Istituto Nazionale di Oceanografia e Geofisica Sperimentale (Trieste); • Centro Interdisciplinare di Bioacustica e Ricerche Ambientali (Pavia); • Marina Militare Italiana;
• SACLANT NATO Undersea Research Center.
Le prime attività sono state quelle di scelta e caratterizzazione di un sito ideale agli scopi del KM3NeT. Infatti la scelta del sito per il futuro telescopio è di fondamentale importanza, e dovrà essere installato in un sito, non troppo lontano dalle coste, avente le seguenti caratteristiche:
Profondità superiore a 3000 m in modo da ottenere una buona reiezione del fondo dovuto ai muoni atmosferici;
Presenza di un pianoro di lato superiore ai 10 km per l’installazione dell’apparato:
Distanza dalla costa inferiore alle 50 miglia nautiche per facilitare le operazioni di installazione e monitoraggio;
Bassa attività biotica la quale potrebbe peggiorare le proprietà di trasmissione della luce in acqua ed aumentare i sedimenti in sospensione;
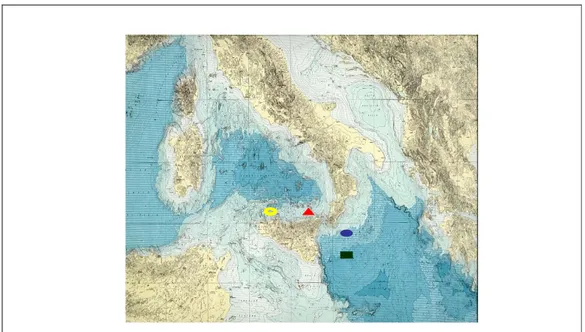
Sono stati identificati due siti nel bacino tirrenico, al largo di Ustica e di Alicudi , e due nel bacino ionico, al largo di Capo Passero (Fig. 2.1).
Tali aree sono localizzate approssimativamente:
35° 50’ Nord, 16° 10’ Est nel Mar Ionio, a Sud-Est di Capo Passero; 39° 05’ Nord, 13° 20’ Est nel Mar Tirreno, a Nord-Est dell’isola di Ustica; 39° 05’ Nord, 14° 20’ Est nel Mar Tirreno, a Nord dell’isola di Alicudi.
La collaborazione ha selezionato il sito di Capo Passero come migliore tra i siti proposti. Successivamente a questa scelta la collaborazione ha iniziato un intenso programma di caratterizzazione delle proprietà ottiche ed oceanografiche del sito prescelto [112][125].
Fig. 2.1 - Siti esplorati dalla collaborazione NEMO: Alicudi(triangolo rosso), Ustica (anello giallo), Capo Passero ( quadrato verde).
Successivamente la collaborazione NEMO ha studiato una configurazione architettonica tale da raggiungere (per muoni di 1 TeV) un’area efficace dell’ordine del km2 e una risoluzione angolare migliore del decimo di grado (fattori di merito). Schematicamente l’apparato sottomarino sarà costituito da:
Il telescopio stesso realizzato con strutture semi-rigide ( le Torri o Tower TW) ancorate sul fondo del mare. Le torri ospiteranno i sensori ottici e le altre strumentazioni
CAPITOLO 2 Descrizione KM3NeT Una rete di cavi sottomarini elettro-ottici per connettere la struttura del laboratorio alla
stazione di terra;
Una stazione di terra che fornisce l’energia al laboratorio sottomarino e che ospita il sistema per il controllo e la gestione della strumentazione delle infrastrutture ed il sistema di raccolta ed elaborazione dati.
2.2 Descrizione del “Design Study KM3NeT”
Il lavoro necessario per realizzare il telescopio sottomarino viene condotto nel quadro di un Design Study, iniziato nel 2002, instituito dall’Unione Europea.
I tre progetti pilota ANTARES, NESTOR e NEMO hanno esplorato e stanno continuando ad esplorare nuove tecnologie e metodologie di ricerca, costruendo e schierando, in siti considerati idonei, “telescopi pilota” in piccola e media scala destinati a funzionare in profondità marine che variano da 2500 a 4000 m.
La progettazione, la costruzione e la gestione in funzionamento del telescopio KM3NeT viene realizzata da un consorzio formato principalmente dagli Istituti attualmente impegnati nei tre succitati progetti pilota. Sulla base della perizia principale di questi gruppi di ricerca è previsto un periodo di tre anni per il lavoro preparatorio di Ricerca e Sviluppo (R&D), più 5 anni per la costruzione e lo schieramento in mare.
Il Design Study del KM3NeT, superate le problematiche iniziali inerenti la configurazione dei fotomoltiplicatori, ha avuto il suo effettivo inizio nel febbraio 2006. I tempi presunti per la realizzazione dell’apparecchiatura sono:
estate 2007 definizione del “Conceptual Design Report” (CDR);
febbraio del 2009 con “Tecnical Design Report” (TDR) sancisce la fine della suddetta fase preparatoria di R&D;
2009-2010 la fase preparatoria; 2010-2012 costruzione;
2011-20xx (data da stabilire) esercizio.
Gli obiettivi e gli scopi del Design Study sono perseguiti tramite un percorso che va dalla: rivisitazione critica delle soluzioni tecniche correnti;
studio comparato dei siti candidati;
valutazione dell’assicurazione e del controllo della qualità; collegamento con l’industria;
ricerca di fondi e costituzione di modelli di governo e di gestione di tutte le attività all’interno del Design Study [1].
I quesiti chiave a cui bisogna necessariamente dar una risposta affinché il periodo di R&D possa assicurare la completa realizzazione e riuscita del progetto KM3NeT, riguardano essenzialmente: a) l’architettura da usare per la struttura subacquea dei fotomoltiplicatori;
b) la metodologia di trasferimento dei dati alla struttura litoranea, c) la separazione delle unità di rilevazione da quelle di calibratura, d) il dimensionamento delle unità di fotorilevazione (OM),
e) lo sviluppo di nuove tecnologie per quanto riguarda i veicoli subacquei autonomi (AUV) e quelli comandati a distanza (ROV);
f) la scelta del sito.
Il sito per la messa in atto di tale progetto viene scelto tra i possibili siti del Mar Mediterraneo che ospitano attualmente i progetti pilota: NEMO, ANTARES, e NESTOR. Il Mar Mediterraneo è il posto ideale per questa istallazione date le proprietà ottiche eccellenti alla giusta profondità, il tutto dovrà necessariamente essere abbinato ad un’infrastruttura litoranea eccellente per il funzionamento delle operazioni marine, sia d’ istallazione, che per l’elaborazione dei dati . La scelta di un sito ottimale per la installazione del rivelatore ha una importanza fondamentale per le prestazioni del rivelatore e per i costi del progetto stesso.
E’ stata impostata un’attività di ricerca e caratterizzazione di un sito sottomarino adeguato alla realizzazione del telescopio per neutrini, stabilendo una serie di requisiti fondamentali che il sito prescelto deve soddisfare.
Il sito deve essere sufficientemente profondo, per schermare l’apparato di misura dall’elevato flusso di muoni atmosferici, di bassa energia e provenienti dall’alto, in modo da permettere la rivelazione del più debole flusso di muoni diretti verso l’alto, originati da neutrini che dopo aver
CAPITOLO 2 Descrizione KM3NeT atmosferici rappresentano un rumore per la rivelazione del segnale di neutrini astrofisici. La
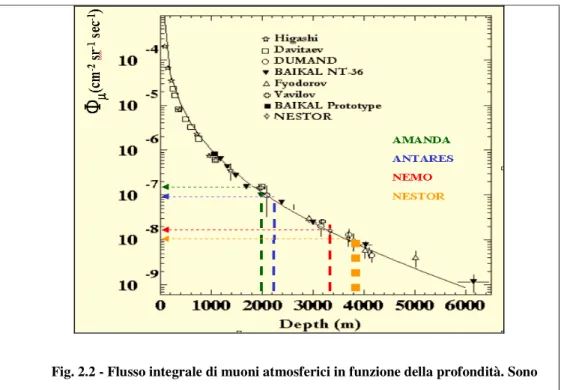
capacità di reiezione di tale rumore è funzione dell’angolo dei muoni rispetto alla verticale, della loro energia e dipende in gran parte dalla validità dell’algoritmo di ricostruzione delle tracce nel distinguere tracce dirette verso il basso da quelle che si propagano verso l’alto. Alla profondità di circa 3500 m il flusso di muoni atmosferici è ridotto di cinque ordini di grandezza rispetto al flusso misurato in superficie (Fig. 2.2). Dalle simulazioni Montecarlo [128] si stima che la probabilità di ricostruire, erroneamente, come diretta verso l’alto una traccia dovuta ad un muone atmosferico è minore di 10-6 (tale condizione è raggiungibile sperimentalmente); a 3000 metri di profondità avremo un rapporto segnale/rumore che permetterà di identificare i deboli flussi di neutrini astrofisici.
Fig. 2.2 - Flusso integrale di muoni atmosferici in funzione della profondità. Sono evidenziate le profondità dei rivelatori proposti ed in costruzione
La trasmissione dei dati dal rivelatore al laboratorio a terra, così come la trasmissione dell’energia necessaria all’apparato sottomarino, necessitano l’impiego di un cavo elettro-ottico sottomarino. Tali cavi, generalmente usati per comunicazioni e per trasmissioni di dati, sono costosi e richiedono opportuni accorgimenti durante il posizionamento. Ciò farebbe preferire senza dubbio siti abissali più vicini alle coste. D'altronde un sito troppo vicino alla scarpata continentale potrebbe essere sede di pericolosi fenomeni di instabilità quali correnti di densità e
possibile trasmettere dati su fibra ottica per circa un centinaio di chilometri senza l’ausilio di amplificatori di segnali e quindi senza la necessità di utilizzare ulteriori costosi apparati sottomarini.
Il sito deve avere ottime proprietà di propagazione della luce Cherenkov [127], in modo che la ricostruzione dalla traccia del neutrino in telescopi di scala km3 sia basata sulla rivelazione di fotoni Cherenkov irraggiati in acqua da particelle relativistiche. In particolare le proprietà dell’acqua marina di assorbire la luce determinano direttamente la densità di sensori ottici nel rivelatore. Le proprietà di diffusione della luce influiscono, invece, sulla capacità del rivelatore di ricostruire il pattern spazio-temporale della traccia Cherenkov prodotta dal passaggio dei muoni in acqua.
Il sito deve mostrare un rumore ottico trascurabile. La presenza dell’isotopo radioattivo 40K (decade -) nel sale marino, determina la presenza di un fondo ottico naturale del mare. Tale luminescenza è dovuta alla luce Cherenkov irraggiata dagli elettroni prodotti nel decadimento del 40K. Questa luce costituisce un fondo ottico “non correlato” temporalmente (come invece la luce Cherenkov prodotta dai muoni) ma può determinare “false correlazioni” con la luce prodotta dai µ, peggiorando la ricostruzione della traccia. Le simulazioni numeriche mostrano che il rumore di fondo ottico non inficia le prestazioni del rivelatore entro valori compatibili con ~40 kHz (per fotomoltiplicatori da 10’’ con soglia di rivelazione di 0.25 fotoelettroni). Il rumore di fondo effettivamente atteso dal 40K è pressoché simile in tutti i mari (la variazione della concentrazione di sale, e quindi di 40K, nel sale marino è dell’ordine del percento).
Il comportamento delle proprietà ottiche del sito pone delle costrizioni sull’utilizzo di trigger nell’elettronica così come per le strutture meccaniche nei moduli ottici.
CAPITOLO 2 Descrizione KM3NeT
Quando vengono esposte all’acqua marina, le superfici dei moduli ottici (Fig. 2.3) sono disturbate dalla combinazione di due processi:
organismi viventi, principalmente batteri, cresciuti sulla superficie più esterna; sedimenti depositati sulle superfici rivolte verso l’alto.
Mentre lo sviluppo dei batteri è ritenuto essere quasi trasparente, i sedimenti aderiscono alla superficie e gradualmente la rendono opaca, diminuendo la sensibilità del rilevatore. Questo fenomeno è ritenuto dipendente dal sito così come la crescita dei batteri diminuisce con la profondità, e il livello di sedimenti dipende dalle vicine fonti di sedimenti come le rive. Questi fenomeni sono stati quantificati attraverso specifici test .
Nel sito il tasso di sedimentazione deve essere basso,la presenza di sedimenti in acqua può infatti influenzare, negativamente, le capacità di misura del rivelatore. I sedimenti (organici ed inorganici) alterano la diffusione della luce peggiorando la ricostruzione angolare delle tracce. Il deposito di sedimenti sulla regione sensibile dei rivelatori per fotoni, fotomoltiplicatori di grande superficie, riduce inoltre l’efficienza globale di rivelazione.
Le correnti d’acqua sottomarine devono essere di piccola intensità e poco variabili in direzione. Ciò è importante per diversi motivi:
non implica particolari richieste per la struttura meccanica di sostegno dell’apparato; rende più semplice il posizionamento in acqua del detector;
il rumore ottico dovuto alla bio-luminescenza è limitato. tale fenomeno è infatti fortemente correlato a variazioni della corrente d’acqua.
La trasparenza dell’acqua influenza l’efficienza del rilevamento dei muoni, mentre la somma delle luci diffuse determina il limite della risoluzione angolare del rilevatore. Questi due parametri influenzano il design del rilevatore. Devono essere misurati sul sito, perchè campioni d’acqua possono degradarsi quando portati in superficie.
Inoltre per le operazioni di posizionamento e di recupero sono necessarie condizioni marine (es. altezza delle onde,velocità del vento) accettabili, che durino per periodi che possono arrivare ad alcuni giorni. Queste condizioni dipendono sia dalla natura delle operazioni che dalle caratteristiche della nave. Anche su questi aspetti è stato fatto uno studio approfondito, ricevendo i dati da diverse fonti metereologiche.
progettazione meccanica del rilevatore. Tutte le misurazioni della corrente in profondità raccolte durante i test hanno mostrato una corrente massima di 18 cm/s.
I membri del consorzio provengono da tutta Europa e sono composti da: Università, Associazioni scientifiche, Istituti di ricerca, i quali tutti, contribuiscono alla realizzazione del Design Study KM3NeT, coordinandosi in modelli collaborativi concepiti in Pacchetti di Lavoro
(WP). Essi sono organizzati in maniera da interagire attivamente tra loro nelle varie fasi
progettuali (CDR, TDR) [76], tramite dei Workshop denominati in maniera progressiva con
l’acronimo VLVnT (Very Large Volume neutrinos Telescope).
Nel secondo Workshop (il più recente) i principali soggetti della discussione sono stati:
stato corrente del progetto dei rilevatori ad alta energia;
condizioni e prospettive del neutrino di alta energia, del raggio gamma e della fisica del raggio cosmico;
condizione dei progetti di fisica marina riferita alle infrastrutture nelle profondità marine;
sviluppo degli attrezzi di analisi di simulazione e di dati del software (flusso di neutrini, interazioni del neutrino H.E.(high energy), propagazione dei leptoni, ricostruzione degli eventi, parametri progettuali del rilevatore, accettazioni, risoluzioni, etc);
ingegneria del rilevatore (sensori ottici e acustici, architettura del rilevatore, garanzia della qualità e anali dei rischi, etc);
infrastrutture sulla superficie del litorale e nelle profondità marine (sistema di corrente elettrica, cavi e connettori, funzionamento in mare, etc);
informazioni tecnologiche (elettronica per il trattamento del segnale, lettura, trasmissione di dati, calibratura, acquisizione ed immagazzinaggio di dati, etc) [124];
Per quanto concerne la suddivisione in WP, l’INFN coordina i pacchetti di lavoro concentrati sulla valutazione sia logistica, che strutturale delle infrastrutture marine e su terra, sull’Analisi di Rischio “Risk Assessment” del progetto (del funzionamento, della messa in atto del telescopio) e
CAPITOLO 2 Descrizione KM3NeT procedure di organizzazione e realizzazione del complessivo, in modo tale da costituire di fatto
la garanzia dell’effettiva riuscita e realizzazione.
Tali pacchetti di lavoro sono attualmente identificati come WP5 e WP7 rispettivamente. I WP identificati nell’ambito del Design Study sono nove di seguito viene riportato il titolo
WP1: Management of the Design Study WP2: Physics analysis and simulation WP3: System and product engineering WP4: Information technology
WP5: Shore and deep-sea infrastructure WP6: Sea surface infrastructure.
WP7: Risk assessment and quality assurance WP8: Resource exploration
WP9: Associated science
2.2.1 Descrizione del WP7
Risk Assessment
L’analisi dei rischi è un’attività cruciale per la fattibilità di un progetto cosi complesso. L’obiettivo di questa task è di eseguire l’analisi di rischio al progetto durante la definizione iniziale dell’intero sistema di rilevamento e dei suoi sottosistemi. Questo consentirà di verificare l’affidabilità di ogni suo sistema, di ogni componente cruciale, delle procedure principali (schieramento, connessione) e di tutte le operazioni necessarie al suo funzionamento. L’intento finale di questa task è l’individuazione dei punti critici del sistema in termini affidabilistici e quindi come conseguenza lo stabilire i requisiti per eventuali azioni correttive da apportare al progetto. Durante l’ultima fase del presente Design Study l’analisi dei rischi consentirà di caratterizzare pienamente il progetto e di identificare i suoi punti deboli. Inoltre permetterà di validare i risultati raggiunti, comparandoli alle specifiche iniziali.
Quality Assurance
Durante la prima fase del Design Study il lavoro di questa task sarà quello di definire gli standards e i metodi di valutazione della qualità per tutte le procedure e i processi del Design Study: progetto concettuale, studio, scrittura di documenti, realizzazione di un database, e
fase, si dovranno fornire documenti che descrivano:
le procedure di assicurazione della qualità per la produzione, per la validazione dei test e per i componenti finali del rilevatore;
le procedure per lo stoccaggio dei componenti prima e durante le operazioni e le procedure di assemblaggio e integrazione; cosicché si possano definire le caratteristiche dei laboratori dove l’assemblaggio e le integrazioni verranno realizzate;
le procedure e le operazioni per lo schieramento, l’istallazione e la connessione nelle profondità marine delle unità sottomarine [76].
2.3 Descrizione del progetto pilota NEMO
Il progetto NEMO è nato nel 1998 al fine di realizzare una idonea R&D necessaria per lo studio del rivelatore. L’attività principale si è concentrata sulla ricerca e sulla descrizione di un sito ottimale per la sua istallazione e sullo sviluppo di uno studio che ne comprovasse la fattibilità tecnica, tenendo ben presente tutti i relativi componenti ed il loro schieramento in mare. Questo lavoro ha portato alla realizzazione di un progetto preliminare, il primo contributo di tale collaborazione al Design Study KM3NeT è avvenuto durante il primo Workshop (Amsterdam 2003), in cui è stato presentato un intenso programma di caratterizzazione delle proprietà ottiche ed oceanografiche del sito prescelto, grazie ad un esplorazione di lunga durata [112][125]. Nell’ambito del secondo Workshop (Catania 2005) l’attenzione è stata posta sugli aspetti tecnici che l’infrastruttura KM3NeT doveva perseguire. I propositi erano quelli di investigare le più idonee tecniche di rilevamento, gli aspetti del “Design” e le soluzioni di elettronica e di lettura di un telescopio di cosi ampio volume. Il Workshop ha anche analizzato le immaginabili future tecniche possibili valutando la loro fattibilità e utilità, mettendole in relazione ai costi effettivi per la ricerca e sviluppo delle stesse. Allo stato attuale (dopo il secondo Workshop), dopo aver individuato il sito ideale per installare l’apparecchiatura (largo di Capo Passero), e dopo aver investigato sull’architettura e sulle tecniche di rilevamento, la collaborazione NEMO si pone l’obiettivo di individuare tutti i punti critici nella realizzazione dell’infrastruttura a circa 3500 m di profondità. Queste attività sono state divise in due fasi, una fase preparatoria di prove eseguite sul campo (fase 1) che terminerà con lo schieramento di una mini-tower nel porto di Catania, ed una fase di realizzazione di tutte le infrastrutture necessarie (fase 2), che terminerà con lo
CAPITOLO 2 Descrizione KM3NeT schieramento di un’intera torre da 16 piani a largo di Capo Passero; la fine della fase 2 sancirà il
termine delle attività preparatorie all’istallazione effettiva dell’intero telescopio.
Per Nemo Fase 1 numerosi test sono eseguiti sui vari componenti, la struttura conterrà tutti i livelli di concentratore per testare le funzionalità di ognuno di essi.. In figura 2.4 è illustrata il layout di Nemo Fase 1.
Fig. 2.4: Struttura dell’esperimento Fase 1.
2.3.1 Layout telescopio NEMO
La collaborazione Nemo ha approfonditamente studiato, per mezzo di simulazioni numeriche, la più adeguata geometria del telescopio per ottenere, a parità di costi, le migliori potenzialità di scoperta. Questi studi indicano come ottimale, una struttura reticolare composta da 64 torri (fig. 2.5), ciascuna ospitante 64 moduli ottici (per un totale di 4096 PMT), in modo da formare un reticolo tridimensionale cubico con spigolo lungo 1260 m; tutte le torri saranno equidistanziate di circa 180 m, il che permetterebbe di raggiungere un’area di rivelazione media di circa 2 km2 ed una risoluzione angolare di puntamento di qualche decimo di grado, si presenterebbe come soluzione ottimale ma non definitiva. [124]. Con lo sviluppo del progetto, si sta delineando la possibilità che le dimensioni totali del rivelatore possano aumentare. E’ infatti al vaglio degli esperti la possibilità di incrementare le dimensioni del rivelatore fino ad ottenere una base 9 × 9 (fig. 2.6), e di innalzare di due livelli ogni torre raggiungendo così 18 piani di altezza (per un totale di 5832 PMT).
CAPITOLO 2 Descrizione KM3NeT
La struttura della torre di Nemo , vuole avvicinarsi il più possibile alla semplicità costruttiva e di posa di una struttura a stringa (ANTARES), mantenendo la rigidità della struttura offerta dalla configurazione a torre (Fig.2.7). La rigidità della struttura, ne limita i movimenti, permettendo di conoscere la posizione dei singoli moduli ottici misurando un numero limitato di parametri[28].
Fig. 2.7 – Torre di NEMO
Considerando la configurazione tipo 8x8 avremo che le 16 travi sono mantenute in tensione da 4 cavi di sospensione, una zavorra alla base della torre e una boa di galleggiamento posta al suo vertice. Considerando che il primo livello è posto ad una altezza di circa 150 m dal fondo, risulta che ciascuna torre sarà alta circa 750 m [119].
Ogni piano, dovrebbe essere costituito da elementi tubolari in alluminio. Ad entrambe le estremità della trave verrà alloggiata una coppia di moduli ottici. Ogni fotomoltiplicatore della coppia osserva una regione d’acqua distinta, essendo orientati uno verso il basso ed uno orizzontalmente. Il basamento, ancorato al fondale marino, è di acciaio.
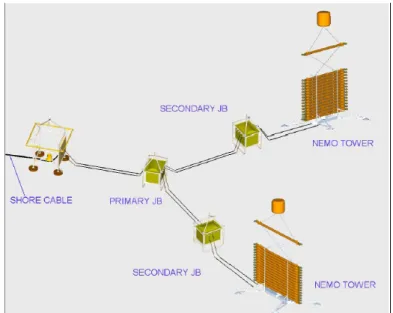
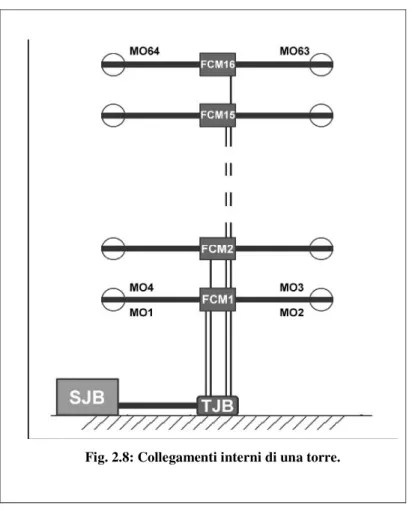
Alla base di ogni torre (Fig.2.8) verrebbe installato un modulo di raccolta dei segnali ottici, TBM (Tower Base Module) inviati dalla JBP (Junction Box Primaria) e dalle 8 JBS (Junction Box
2.5Gbps.
Otto TBM sarebbero quindi concentrati su un unico modulo contenuto in una scatola di derivazione JBS (junction box secondaria). La connessione a terra avverrebbe tramite una JBP (junction box primaria), che raccoglierebbe i dati di tutte le torri e li invierebbe a riva, con velocità di trasmissione di 20Gbps per fibra, attraverso un sistema di fibre dedicate (una per set di dati).
Fig. 2.8: Collegamenti interni di una torre.
Il sistema di moduli speculare permetterà a terra di diramare la serie dei dati fino a riottenere i dati, opportunamente pre-marcati, provenienti da ogni singolo sensore ottico, il tutto basato sulla tecnologia DWDM.
Secondo il progetto attuale, il cavo elettro-ottico principale ( Main Electr-Optical Cable MEOC) verrà posato e terminato con un pannello di interfaccia equipaggiato con speciali connettori
CAPITOLO 2 Descrizione KM3NeT connetterà il cavo elettro-ottico di connessione tra scatola di derivazione principale ed il pannello
di interfaccia. Verranno quindi installate 8 junction box secondarie e connesse alla junction box
principale con l’ausilio del ROV. Infine verranno installate le torri. Ogni junction box secondaria assicura la connessione elettro-ottica ad 8 torri. Sono anche previsti dei collegamenti
supplementari tra le junction box secondarie che fungano da by-pass nel caso di malfunzionamenti o rotture.
Rispetto ad una configurazione a reticolo realizzata con stringhe flessibili (tipo ANTARES), la convenienza di una struttura a torri risiede nel minor numero di elementi da installare in mare e nel minor numero di connessioni sottomarine richieste, ma presenta lo svantaggio di richiedere operazioni di preparazione più complesse.
La scelta dei materiali impiegati nelle torri riveste grande importanza anche nella fase di installazione, infatti, l’uso di materiali leggeri semplifica le procedure di movimentazione degli elementi della torre. Per questo motivo si scelgono cavi in polipropilene o in fibra di vetro che sono più leggeri dei cavi in acciaio, garantendo al tempo stesso elevate prestazioni meccaniche, nonché boe in materiali speciali per lo rotolamento (Unfurling) ed il mantenimento in estensione della torre (TW).
2.3.2 Operazioni marine
Dal punto di vista logistico, le operazioni di installazione in mare richiedono l'impiego di una imbarcazione primaria a posizionamento dinamico dotata di gru e argani; una chiatta della lunghezza di circa 50 m; due rimorchiatori; un argano primario con circa 4000 m di cavo e quattro argani secondari con circa 1000 m di cavo ciascuno; due ROV per le connessioni sottomarine (uno degli ROV ha funzione di riserva)[27]. Le imbarcazioni a posizionamento dinamico possono essere utilizzate anche in condizioni di mare agitato; vengono tenute in posizione non da ancore ma attivando le eliche di posizionamento con il riferimento di segnali rilevati da sistemi acustici e/o satellitari.
Sull’imbarcazione primaria viene controllata l’integrità dei vari componenti e vengono completate le operazioni di assemblaggio di ciascuno degli otto telai che recano i moduli ottici. Durante le operazioni di installazione inizialmente l’imbarcazione primaria viene condotta al sito di installazione per compiere una fase preliminare di rilevamento. Questa fase è di estrema importanza poiché la variabilità delle correnti e del moto ondoso può influenzare le operazioni in
posizionamento della struttura, per cui va conosciuto in anticipo. Una volta completate le rilevazioni, i macchinari necessari all’installazione vengono montati sull’imbarcazione primaria. I componenti delle torri, i telai e i cavi di sostegno (segmenti verticali) della struttura, sono stati pre-assemblati a terra. Vengono poi trasportati all’imbarcazione primaria per mezzo di una chiatta movimentata da rimorchiatori. Si trasporta una quantità di componenti sufficienti per lavorare almeno tre giorni senza dover tornare in bacino.
La chiatta è ormeggiata presso l’imbarcazione primaria e funge da deposito materiali.
Sono allo studio delle ipotesi alternative in cui gran parte dell’assemblaggio delle torri possa essere realizzata “on shore”,guadagnando in termini di tempi di esecuzione a terra.
Il posizionamento delle torri sul fondo in accordo con la geometria di progetto dell'apparato avverrà mediante l'ausilio di un sistema di posizionamento idroacustico.
La struttura da posizionare sarà dotata di un trasduttore la cui posizione potrà essere stabilita per triangolazione in base ai ritardi con cui esso rivela i segnali emessi da fari acustici precedentemente posizionati sul fondo. Il trasduttore verrà recuperato a fine operazione per poter essere impiegato nel deployment delle torri successive. Il sistema di fari acustici servirà inoltre durante il periodo di funzionamento del telescopio sottomarino per permettere di ricostruire la posizione dei moduli ottici anche in seguito ai movimenti e alle deformazioni delle torri[40][41].
2.3.3 Cavo elettro-ottico
La realizzazione e la posa di questa rete di cavi e delle strutture meccaniche è una delle fasi più complesse del progetto, la struttura della maglia deve essere studiata accuratamente per assicurare affidabilità nel tempo e semplicità di manovra durante le operazioni di posa, inoltre, lo svolgimento delle operazioni prevede l’utilizzo di una nave posacavi e di un ROV[132] (Remote Operating Vehichle), cioè un batiscafo per alte profondità guidato dal bordo di una nave appoggio tramite un cavo ombelicale.
Il cavo elettro-ottico ed è un componente altamente critico perché una sua eventuale rottura potrebbe pregiudicare il funzionamento dell’intero sistema. Pertanto si prevede una serie di accorgimenti sia in fase di progetto sia in fase di installazione:
CAPITOLO 2 Descrizione KM3NeT il cavo è ad armatura multipla ed ha un rivestimento esterno in materiale plastico: le armature
conferiscono resistenza meccanica ai conduttori e alle fibre ottiche proteggendole da eventuali azioni esterne quali torsioni o deformazioni catenarie che possono insorgere durante la sua posa, mentre il rivestimento protegge i conduttori e le armature da infiltrazioni d’acqua e/o dall’attacco di agenti chimici;
le parti del cavo in prossimità della riva e sulla terra ferma sono alloggiate in trincea.
La considerevole lunghezza del cavo la notevole differenza di profondità tra installazioni ‘on shore’ e telescopio sottomarino rendono necessarie accurate rilevazioni batimetriche prima della posa del cavo stesso. Per le esigenze della posa, il cavo va suddiviso in sezioni, da 3 a 5 a seconda della scelta della nave che effettuerà l’operazione e delle relative attrezzature[49].