UNIVERSITÀ DEGLI STUDI DI PISA
Facoltà di Ingegneria
Corso di laurea in Ingegneria Meccanica
Tesi di laureaMODELLI DI ATTIVAZIONE MUSCOLARE DELL’ARTO
INFERIORE IN CONDIZIONI DI CAMMINO: CONFRONTO
TRA SOGGETTI GIOVANI ED ANZIANI
Candidato Alessio Ghionzoli Relatori: Prof. P. Dario Ing. F. Di Puccio Ing. S. Micera Ing. V. Monaco Data di laurea 5/03/08Archivio tesi Corso di Laurea in Ingegneria Meccanica 03/08 Anno accademico 2007/2008
MODELLI DI ATTIVAZIONE MUSCOLARE DELL’ARTO
INFERIORE IN CONDIZIONI DI CAMMINO: CONFRONTO
TRA SOGGETTI GIOVANI ED ANZIANI
diAlessio Ghionzoli
Tesi proposta per il conseguimento del titolo accademico di
DOTTORE IN INGEGNERIA MECCANICA presso la
Facoltà di Ingegneria della
Università degli Studi di Pisa Data della laurea
5/03/08 Autore Alessio Ghionzoli Approvata da: Prof. P. Dario Ing. F. Di Puccio Ing. S. Micera Ing. V. Monaco
INTRODUZIONE... 4
A. Sinergie muscolari...4
B. Obiettivi della Tesi...7
1 STATO DELL’ARTE... 8
1.1 Deambulazione...9
1.2 Terminologia ...11
1.3 Biomeccanica e coordinazione muscolare del cammino...14
1.4 Muscoli ...15
1.4.a Tibiotarsica e piede ...16
1.4.b Ginocchio ...19
1.4.c Anca...21
2 SEGNALE EMG... 23
2.1 Origine del segnale ...25
2.2 Genesi del segnale EMG - il potenziale d’azione – ...25
2.3 Propagazione del segnale e rilevazione ...26
2.4 Natura del segnale emg - emg grezzo -...28
2.5 Influenza delle condizioni di indagine e stima del segnale EMG...29
3 MATERIALI E METODI... 33
3.1 Protocollo ...33
3.2 Pre-processamento ...36
3.2.a Filtraggio...38
3.2.b Rettifica...38
3.2.c Filtraggio a media mobile...38
3.2.d Normalizzazione ...39 3.2.e Media ...40 3.4 Post-processamento ...43 4. RISULTATI... 47 4.1 Analisi Fattoriale ...47 5 CONCLUSIONI ... 58 BIBLIOGRAFIA ... 60
INTRODUZIONE A. Sinergie muscolari
Il coordinamento motorio risulta da un'adeguata azione di controllo del Sistema Nervoso Centrale (SNC) sul sistema muscolo-scheletrico. L'obiettivo di tale azione è gestire i molteplici gradi di libertà del sistema, tenendo conto delle caratteristiche non lineari dei muscoli, delle forze di interazione alle articolazioni, dell'influenza del mondo esterno e della ridondanza negli attuatori muscolari (Bernestein, 1967). Molti autori hanno evidenziato come il SNC riesca a semplificare questo compito, attivando delle sinergie muscolari (Grillner, 1985; Bizzi, 1991; Tresh, 2002), ovvero producendo l'attivazione contemporanea di numerosi muscoli, a partire dalla combinazione di un numero ridotto di segnali (Tresh et al., 2002; Hart e Giszter, 2004; Ting e Macpherson, 2005). Lo studio delle sinergie muscolari è stato condotto analizzando i segnali elettrici associati alla contrazione muscolare. Questi, chiamati segnali elettromiografici (EMG), sono il risultato dell'attività dei motoneuroni durante l'eccitazione delle fibre muscolari.
Alcuni ricercatori hanno dimostrato che durante attività motorie cicliche, quali il cammino, l'attivazione dei muscoli assume un andamento sistematizzato all'interno del ciclo di passo (Vaughan, 1995; Winter, 1991) ed esiste correlazione fra i segnali EMG di gruppi muscolari differenti (Vaughan, 1995; Lacquaniti, 2003; Cheung, 2005). I risultati di questi studi hanno suggerito di analizzare le attività di numerosi muscoli coinvolti nel cammino, investigando la possibilità di esprimerle come prodotte da un numero limitato di segnali, detti segnali primitivi. In questo modo, si riuscirebbe a gestire la ridondanza del sistema muscolo scheletrico riducendo la complessità del controllo motorio.
I metodi adottati per estrapolare i segnali primitivi sono strumenti algebrici detti, in generale, metodi di fattorizzazione, tra i quali i più noti sono: Fattorizzazione di matrice non negativa (NMF), L’Analisi Fattoriale (AF), l’Analisi delle Componenti Principali (PCA) e l’Analisi dei Componenti Indipendenti (ICA). In questo lavoro
dell’ Analisi Fattoriale (AF). Gli obiettivi dell’AF sono: esaminare la struttura delle relazioni tra variabili, valutare se il comportamento dei risultati può essere spiegato sulla base di un numero inferiore di informazioni e ridurre il numero di variabili in gioco ad un numero più gestibile. Tresch (Tresch, 2006), confrontando diverse tecniche di fattorizzazione, ha dimostrato che la AF risponde in maniera adeguata allo scopo prefisso, perché è in grado di ricostruire, con affidabilità, l'informazione contenuta all’interno di un set di dati.
Alcuni dei più importanti risultati ottenuti adottando tecniche di fattorizzazione per descrivere il ruolo dei segnali EMG durante il ciclo di passo, sono descritti di seguito. Patla (Patla, 1985), studiando sei muscoli dell’arto inferiore ed uno del tronco a diverse velocità, mediante l’Analisi delle Componenti Principali, ha identificato alcune caratteristiche invarianti relative all'insieme dei dati. In particolare ha mostrato che: i. la fase e l’ampiezza dell’attività muscolare sono modulate in risposta alle velocità; ii. la variabilità tra le varie prove riscontrata nell’attività dei muscoli prossimali è più alta di quella dei muscoli distali;
iii. all’interno di ciascun gruppo i muscoli estensori biarticolari hanno mostrato più alta variabilità dei flessori monoarticolari;
iv. la velocità influenza il valor medio del segnale EMG.
Davis e Vaughan (Davis & Vaughan, 1993) hanno dimostrato che l’attività EMG di sedici muscoli (Hamstring Laterale, Retto Femorale; Erettore Spinale; Peroneo Lungo; Hamstring Mediale; Vasto Laterale; Sartorio; Gastrocnemio Laterale; Tibiale anteriore; Gluteo Massimo; Adduttore Lungo; Gastrocnemio Medio; Estensore Lungo delle dita; Gluteo Medio; Adduttore Grande; Soleo) coinvolti durante la locomozione può essere descritta attraverso la combinazione di quattro segnali primitivi rappresentanti il 95% della variabilità dei dati. Tali segnali descriverebbero la funzione svolta da ciascuno dei gruppi muscolari in relazione al ciclo di passo. Nel dettaglio, i muscoli analizzati sono stati raggruppati in:
a. muscoli operanti durante il contatto del piede con il suolo (heel-strike, HS); b. muscoli attivi nella fase di singolo appoggio;
c. muscoli atti alla propulsione durante la fase di stacco del piede;
d. muscoli attivi sia durante la fase di appoggio che durante quella di volo.
Olree e Vaughan (Olree & Vaughan, 1995), registrando attività EMG di otto coppie di muscoli appartenenti ad entrambe le gambe (Erettore Spinale; Gluteo Medio; Gluteo Massimo; Retto Femorale; Adduttore Grande; Hamstring; Tibiale Anteriore;
Gastrocnemio Medio), hanno mostrato che l’attività muscolare durante il cammino può essere principalmente descritta da tre fattori: la risposta di carico, la propulsione e il fattore di coordinamento avente la funzione di mantenere il movimento ciclico dei due arti.
Merkle (Merkle, 1997), applicando l’AF a sette segnali provenienti dalla muscolatura di gambe, tronco e collo (Sternocleidomastoideo sinistro; Erettore Spinale sinistro; Retto Femorale destro; Bicipite Femorale destro; Tibiale Anteriore destro; Gastrocnemio Medio destro), ha evidenziato che muscoli appartenenti a zone anatomiche differenti si coordinano con lo scopo di armonizzare il movimento di tutte le parti del sistema muscolo-scheletrico.
In sintesi, gli studi presentati hanno confermato che la complessa attività muscolare durante il cammino può essere ricondotta alla combinazione di un numero ridotto di segnali. Le funzioni principali dei muscoli possono essere distinte in azioni deputate al controllo degli arti inferiori, in accordo con le fasi del ciclo di passo, ed al controllo dell’equilibrio di tronco e testa. Questa interpretazione supporterebbe l'ipotesi relativa all’esistenza del Generatore Centrale di Pattern (Central Pattern Generator, CPG), il quale realizzerebbe il compito motorio richiesto, la locomozione, adottando una strategia che ne ridurrebbe la complessità funzionale.
Nessuno degli studi in letteratura si è rivolto all'analisi delle sinergie muscolari nei soggetti anziani per i quali i principali risultati sono una ridotta ampiezza dei picchi e una più bassa variabilità delle forme d’onda del segnale EMG all'interno del ciclo di passo (Winter, 1991). Tali caratteristiche sono state imputate ad una minore plasticità del SNC che comporterebbe una ridotta versatilità nel controllo motorio. Un'analisi più approfondita, che metta a fuoco le sinergie muscolari in soggetti anziani avrebbe, invece, una duplice importanza.
Da una parte, potrebbe evidenziare quali sono gli schemi adottati dai soggetti anziani durante il cammino, a fronte dell'invecchiamento, dall’altra, la conoscenza delle relazioni esistenti nell'attivazione muscolare durante il cammino può rappresentare un elemento di confronto durante la somministrazione di terapie riabilitative postume ai traumi di maggiore frequenza nei soggetti anziani.
In altri termini, è ben noto che l'invecchiamento influenza il sistema neuro-muscolo-scheletrico per effetto di cambiamenti di natura neurologica e fisiologica.
la dopamina) ed alla riduzione di acutezza del sistema uditivo, vestibolare, visivo e somatosensoriale (Peterka, 1990; Martin-Hunyadi, 1997);
I secondi, come la perdita di forza muscolare causata da una riduzione di unità motorie (Trueblood, 1991; Bendall, 1989; Bassey, 1988) e l’elevato fabbisogno di ossigeno richiesto dalle cellule muscolari, la cui conseguenza sembra essere la riduzione della velocità di passo (Inman, 1981; Clark J.E., 1995), cambiamenti delle caratteristiche di fibre e tendini, il cambiamento di proprietà meccaniche del tessuto connettivo periarticolare (PCT) (Buckwalter, 1985) e la degenerazione meccanica della cartilagine nelle articolazioni (Sokololoff L., 1969).
Tali modificazioni influenzano il cammino, riducendo la velocità, modificando la cinematica e la dinamica (Oberg, 1993; Oberg, 1994, Winter, 1991; Judge, 1996; DeVita, 2005), e richiedendo agli anziani un adattamento neuro-muscolare tale da eseguire compiti motori, quali il cammino, con sufficiente destrezza (McGibbon, 2003).
Quindi uno studio dedicato alle sinergie muscolari negli anziani metterebbe in evidenza quali sono i gruppi muscolari maggiormente influenzati dall'invecchiamento e quali sono le strategie adottate per compensarne gli effetti.
B. Obiettivi della Tesi
Obiettivo fondamentale di questo studio è esplorare le relazioni tra i segnali EMG di 6 coppie di muscoli (Tibiale anteriore, Gastrocnemio laterale, Soleo, Retto femorale, Vasto mediale, Bicipite femorale) appartenenti ad entrambe le gambe, in soggetti giovani ed anziani durante il cammino. Lo scopo è comparare i segnali primitivi fra i due campioni ed esplorare la loro struttura in relazione ai ruoli svolti durante il ciclo di passo.
L’ipotesi che ci si propone di verificare è che l'attivazione muscolare negli anziani, per effetto della minore plasticità motoria, sia caratterizzata da una struttura più semplice e riconoscibile rispetto a quella dei giovani.
1 STATO DELL’ARTE
L’indagine relativa all’attivazione sinergica dei muscoli durante il cammino è stata svolta per un’ampia varietà di scopi ed i risultati sono stati presentati con diversi gradi di dettaglio.
Alcuni studi hanno focalizzato l’attività dei muscoli di un solo arto, altri hanno considerato gruppi di muscoli selezionati del bacino inferiore, altri ancora muscoli del bacino inferiore con muscoli del tronco superiore.
All’interno della popolazione dei segnali EMG è stata notata una certa differenziazione nella forma dell’onda e da circa un trentennio l’attenzione è rivolta verso questo fenomeno.
Paul (Paul, 1974), riportando i risultati di diversi studi, ha indicato significative incompatibilità nell’andamento dei segnali EMG di particolari muscoli o gruppi muscolari, e tali disaccordi sono stati attribuiti sia a differenze nei protocolli di ricerca che a variazioni dinamiche inter-individuali (Pedotti, 1977).
Ad esempio è noto che i segnali EMG possono cambiare con la velocità del cammino (Schiavi, 1983; Lacquaniti, 2004).
Principali differenze nei protocolli sperimentali sono state riscontrate nei seguenti casi:
- soggetti che camminano liberamente o in cadenza con un metronomo. - soggetti che camminano alla propria andatura o ad andature differenti. - soggetti che indossano scarpe o che sono scalzi.
- soggetti che camminano su un pavimento, su un piano metallico, o su un tapis roulant
- attività EMG registrata con elettrodi di superficie o ad ago. -
Un altro fattore che complica l’assimilazione dei risultati di tutte le prove è costituito dai diversi metodi usati per analizzare e rappresentare l’attività EMG. Già una pubblicazione risalente al 1980 (Winter et al,1980) contiene indicazioni al riguardo dei protocolli sperimentali.
Altre pubblicazioni indicano che il miglior metodo è la media del segnale EMG normalizzato all’interno del ciclo di passo (Bodem, 1981; Schiavi, 1983; Winter,
Un’altra questione significativa è il tipo di normalizzazione adottato per ridurre la variabilità fisiologica dei muscoli individuali.
Pubblicazioni risalenti a metà anni ’80 hanno mostrato che una normalizzazione sul passo medio è in grado di ridurre la variabilità dei segnali EMG in un numero elevato di passi (Schiavi, 1983; Yang, 1982).
I ricercatori in passato hanno utilizzato ampie rappresentazioni includenti: - dati grezzi (Basmajian, 1978)
- modelli on-off (Perry, 1974)
- segnale EMG rettificate ed integrate nel 5% della lunghezza del passo (Grieve, 1974).
La significatività dei risultati è anche influenzata dal numero di soggetti in ogni particolare indagine.
1.1 Deambulazione
Il cammino utilizza una sequenza ripetitiva di movimenti degli arti al fine di far avanzare il corpo mantenendo contemporaneamente la stabilità dell’appoggio. Poiché ogni sequenza comprende una serie di interazioni tra i vari segmenti degli arti inferiori e la massa corporea totale, l’identificazione dei numerosi eventi che avvengono richiede l’ analisi del cammino sotto diversi aspetti.
Tre sono i metodi generalmente utilizzati per il riconoscimento delle fasi del cammino: il primo suddivide il ciclo in base alle variazioni del contatto reciproco con il suolo da parte dei due piedi; il secondo considera le caratteristiche di tempo e di spazio del passo; il terzo identifica il significato funzionale degli eventi nell’ambito del ciclo del passo e individua i periodi come fasi funzionali del cammino.
Durante l’avanzamento del corpo, un arto funge da sostegno, mentre l’altro avanza fino al successivo appoggio; in seguito i due arti si scambiano di ruolo ed entrambi i piedi sono in contatto con il terreno durante il trasferimento del corpo da un arto all’altro. Questa serie di eventi è ripetuta da ogni arto in modo alternato, fino al raggiungimento della destinazione. Una singola sequenza di queste funzioni di un arto è definita ciclo di passo.
La deambulazione può essere indicata come la capacità di spostare il centro di pressione (CPS: proiezione a terra del baricentro) da un piede all’altro alternativamente e dinamicamente per mantenere l’equilibrio dinamico.
I presupposti neuromeccanici per la locomozione in posizione eretta bipede sono: - il supporto antigravitazionale del corpo, quando la postura eretta dipende dai
riflessi di raddrizzamento e dai riflessi antigravitazionali che consentono il passaggio da supino a seduto e eretto.
- L’effettuazione dei passi, che è un movimento di base presente già alla nascita, integrato a livello del midollo, mesencefalo, diencefalo;
- I mantenimento dell’equilibrio - un mezzo di propulsione
Stimoli appropriati alla deambulazione sono il contatto della pianta del piede al suolo e lo spostamento del centro di gravità (su un piede, poi sull’altro).
Il centro di gravità (CPS) deve spostarsi da un lato all’altro (piede destro, piede sinistro e viceversa) in una situazione di equilibrio instabile entro limiti ristretti -ottenuto attivando i riflessi posturali e di raddrizzamento periferici e centrali, attraverso informazioni afferenti precise: visive, vestibolari, propriocettive. Sono inoltre necessari movimenti alternati in avanti e di lato .
La deambulazione normale avviene per lo più con la testa eretta, il tronco eretto, le braccia che pendono in modo sciolto e armonioso lungo i fianchi. I piedi sono leggermente divaricati e i passi sono di lunghezza moderata in cui i malleoli interni quasi si toccano quando un piede sopravanza l’altro.
Mentre la gamba si porta avanti c’è una flessione coordinata dell’anca e del ginocchio, una dorsiflessione del piede ed una elevazione appena percettibile dell’anca che permette al piede di sfiorare il suolo. Ad ogni passo il torace si sposta leggermente in avanti e verso il lato opposto a quello dell’arto inferiore che avanza. Il tallone poggia al suolo per primo.
Il modo di camminare differisce da un individuo all’altro e tra uomo e donna; infatti cadenza, pesantezza sono fattori variabili.
Parametri importanti per l’analisi del passo sono la lunghezza, la larghezza, l’angolo del passo.
Il semipasso o passo semplice (step) è dato dalla distanza fra l’appoggio di un tallone e quello controlaterale .
Nei soggetti normali le fasi in cui è suddiviso il ciclo di passo sono molto simili; mentre nei patgologici il cammino è frequentemente alterato.
La lunghezza del passo secondo taluni autori sarebbe pari in condizioni di normale velocità a circa l’80-90% dell’altezza corporea del soggetto.
La lunghezza del passo dipende dalla lunghezza degli arti inferiori, dall’istante del doppio appoggio, che si riduce fino ad annullarsi nel passaggio dalla marcia alla corsa, dal grado di estensione del ginocchio e dalla flessione della coscia dell’arto anteriore.
1.2 Terminologia
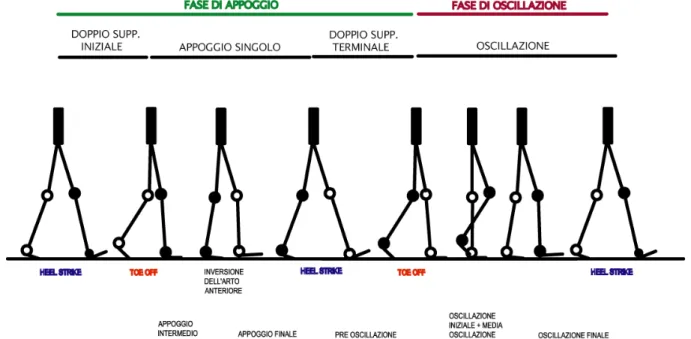
La terminologia utilizzata per la descrizioni degli eventi temporali del cammino è presentata da Perry (Perry, 1981). Ciascun passo (ciclo di passo) è composto di due step ed è diviso in due fasi principali:
- fase di appoggio, che è il periodo temporale in cui ogni parte ipsilaterale del piede è in contatto con la superficie di cammino;
- fase di oscillazione, che è il periodo temporale di assenza di contatto del piede col suolo.
I tempi di accadimento di tutti gli eventi sono indicati come percentuale del passo. Quando entrambi i piedi (tallone sinistro/destro, avampiede destro/sinistro) sono in appoggio si parla di doppio appoggio. La fase di appoggio rappresenta circa il 60% della durata complessiva del passo, la fase di oscillazione riveste il restante 40%. In Figura 1 è rappresentata una tipica sequenza temporale del ciclo di passo.
Figura 1: Fasi del ciclo di passo.
Il passo normale è simmetrico ed esso richiede principalmente tre condizioni: - stabilità nella fase di posizione
- un mezzo di progressione - conservazione di energia
La stabilità richiede un continuo bilanciamento del tronco sopra la base del supporto. Nella progressione l’energia potenziale è convertita in energia cinetica.
La maggior parte di energia cinetica per il movimento della gamba è di natura inerziale, inoltre dipende dai flessori plantari (85%) e dai flessori del bacino (15%). L’energia è conservata minimizzando i movimenti del centro di gravità del corpo attraverso un controllo del momento e un trasferimento di energia tra le articolazioni. La fase di appoggio consiste di cinque periodi: contatto, caricamento, appoggio
intermedio, appoggio finale, preoscillazione.
Durante tutto il posizionamento il bacino ruota gradatamente all’indietro ed il fianco si estende: tale movimento oppone resistenza alla tendenza del fianco a flettersi nella prima fase di posizionamento per il peso e l’inerzia del corpo.
Contatto
All’inizio del doppio posizionamento dell’arto (heel strike) il tallone entra in contatto col terreno, il ginocchio è esteso e la caviglia si flette con il movimento del piede. Nel primo intervallo di posizionamento, i muscoli tibiali anteriori e quelli del dito del piede funzionano massimamente per prevenire il cedimento del piede e lo decelerano attraverso il piano.
Quello che si verifica è una accettazione del peso corporeo da parte del piede ed i muscoli interessati svolgono un gioco di forze per creare un costrutto sufficientemente rigido atto a garantire stabilità.
Caricamento
E’ il periodo iniziale del doppio supporto e si estende dal contatto del tallone col terreno (heel strike) al distacco della punta (toe-off) del piede opposto.
Durante questo periodo si verifica una flessione del ginocchio di 15° ed una flessione plantare del solito angolo nella caviglia; questo può essere interpretato come un meccanismo di conservazione dell’energia. In tutta la prima fase di posizionamento i tendini ed i dorsiflessori della caviglia rimangono attivi.
I quadricipiti ed i muscoli del gluteo si attivano durante il caricamento e nel corso di tutta la prima fase di appoggio intermedio, per mantenere stabilità del fianco e del ginocchio.
Appoggio intermedio
E’ il periodo di supporto su singola gamba; esso si estende dalla fine del supporto su doppia gamba sino all’istante in cui il corpo è posizionato sopra la gamba supportante.
In questa fase il ginocchio è esteso e la caviglia è in posizionamento neutro (come nell’heel stike), il muscolo gastrocnemio medio attua il controllo dell’avanzamento tibiale (prevenendo la tendenza, causata dal peso corporeo e dall’inerzia, alla dorsiflessione della caviglia ).
Appoggio finale
Preoscillazione
E’ il secondo periodo di doppio supporto, esso si estende dal contatto del piede opposto col terreno, al toe-off ipsilaterale.
Il ginocchio si flette di 35° mentre la caviglia ha una flessione plantare di 20°.
La gamba è inizialmente scarica, cosicché un richiamo elastico permette la flessione plantare della caviglia. Si ha un trasferimento di energia alla gamba che aiuta la flessione del ginocchio in preparazione alla fase di movimento.
La fase di movimento è divisa in tre tappe corrispondenti a tre periodi di tempo: iniziale, medio e finale. Durante la fase di movimento il ginocchio si dorsiflette per le contrazioni concentriche dei muscoli tibiali anteriori. Tutti gli altri muscoli sono inattivi.
1.3 Biomeccanica e coordinazione muscolare del cammino
Osservando il cammino non possiamo fare a meno di notiamo armonia dei movimenti. Tale apparente leggiadria suggerisce senza dubbio un’idea di semplicità di coordinazione motoria. Tuttavia, nonostante molti studi in materia, resta ancora poco chiaro il modo in cui i singoli muscoli adempiono al reclutamento di funzionalità meccaniche nella locomozione Nelle ricerche si trova un’ampia testimonianza di misure biomeccaniche sull’attività muscolare di individui sani, patologici, anziani, giovani (Winter, 1991; Prince, 1997), bambini (Vaughan, 1997), in condizioni di cammino. I Principali metodi sperimentali consistono in registrazioni di attività elettromiografica con elettrodi invasivi o di superficie (Rab GT, 1994; Sutherland DH, 2001) e misure di tipo dinamico (Whittle M, 1991), svolte all’interno di laboratori specializzati nello studio del cammino. Alcune variabili, tipiche di studi del genere, come posizione, velocità ed accelerazione, possono essere misurate o ricavate durante lo svolgimento del task motorio tramite appositi marker posizionati in punti specifici del corpo, altre, come la forza di reazione con il terreno vengono principalmente valutate per mezzo di piattaforme di forza o sensori di pressione, posti sotto la suola delle scarpe (Bontrager, 1998; Allard et al., 1997). Un’ulteriore stima delle diverse variabili biomeccaniche può essere estratta da misure di cinematica e di forza, avvalendosi di modelli dinamici inversi che possono richiedere indagini di tipo energetico associate alle varie parti del corpo come l’estrazione di momenti e potenze relativi alle giunzioni articolari di caviglia, ginocchio e bacino
Molti laboratori clinici mettono a confronto le caratteristiche del cammino di individui sani con quelle di soggetti affetti da patologie neurologiche o ortopediche (Vaughan, 1997; Adams, 1994; Olney, 1996). Altri studi, confrontando il cammino di soggetti giovani a quello degli anziani, hanno evidenziato come contratture nei flessori di anca e di debolezza nei flessori plantari limitino le performance motorie indipendentemente dalla velocità di deambulazione (Kerrigan, 1998).
Ipotesi su relazioni causali tra variabili quali segnali EMG, cinematica e velocità di cammino, hanno reso più chiara la comprensione di come i muscoli si coordinino tra loro nell’esecuzione del determinato task locomotorio. Vaste indagini, tendenti a gettare basi su cui innalzare strutture riabilitative, grazie all’identificazione di legami tra patologie neuro-muscolo-scheletriche e modelli di cammino anormale, hanno fornito nuove speranze sulla possibilità di trattamenti correttivi (Brand, 1992; Mulder, 1998).
Un ampio ventaglio di nuovi orizzonti eplorativi si è aperto negli ultimi decenni grazie alle simulazioni dinamiche di modelli muscolo-scheletrici implementati tramite software (Delp, 1990; Chao, 1993), le quali sono state d’aiuto nella comprensione delle relazioni causali tra i modelli EMG e dinamica del cammino (Zajac, 2003). L’assenza di un supporto stazionario ed esterno per il bacino rende il sistema altamente instabile, complicando l’interazione tra i piedi ed il terreno.
Un criterio di cui ci possiamo avvalere, per comprendere il complesso fenomeno del cammino umano, consiste nell’indagine approfondita della meccanica del corpo multi-articolare attraverso un semplice modello meccanico senza muscoli (Alexander, 1995). Ad esempio, alcuni studi si sono avvalsi di un semplice set di modelli fisici atti a definire un totale di sei fattori del cammino utilizzati per fornire una descrizione qualitativa di come la dinamica di bacino, di arti e piedi, provveda a rendere dolce il movimento del centro di massa (COM) del corpo (Inman, 1981, 1984). Indagini svolte sul ruolo dei fattori del cammino hanno chiarito che due di questi su tutti hanno un sensibile effetto sul movimemento del tronco.
1.4 Muscoli
La fig 2 mostra le fasi di attività di muscoli RF, VM, BF, GMAX, TA, TP, SO, GL, PL, PB, all’interno di un ciclo di passo.
FIG 2: Attività on-off di alcuni muscoli dell’arto inferiore
1.4.a Tibiotarsica e piede
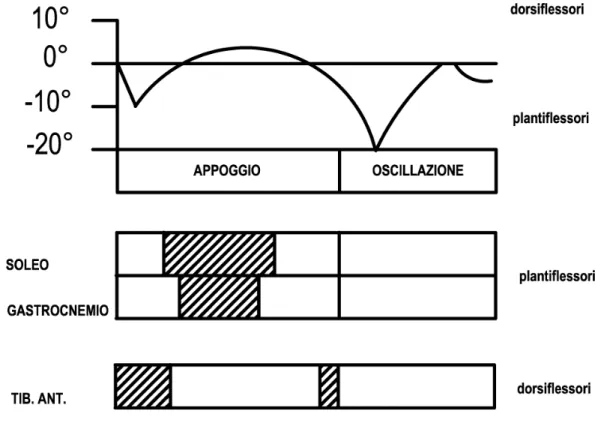
Figura 3: Modello di attività dei muscoli pretibiali
In generale i muscoli pretibiali sono attivi nel periodo di scarico della fase finale di oscillazione e nel periodo di carico della fase di appoggio.
La loro attività nel periodo centrale della fase di oscillazione è altamente variabile ed in molti soggetti può essere assente. L’elevato livello di questa, durante l’ultima parte del periodo di carico, mostra come tali muscoli, specialmente il tibiale anteriore, contribuiscano alla stabilizzazione della caviglia ed al trasferimento del peso sul bordo laterale del piede.
La categoria dei muscoli plantari della caviglia è costituita dai sette muscoli che si trovano dietro alla tibiotarsica, e sono il soleo (SOL), il gastrocnemio (GM), il tibiale posteriore (TP), il flessore proprio delle dita (FD), il flessore proprio dell’alluce (FA), il peroneo lungo (PL), il peroneo breve (PB).
La loro capacità effettiva varia in modo considerevole, infatti il soleo ed il gastrocnemio forniscono il 93% del momento interno teorico in flessione plantare, mentre gli altri provvedono per il 7%. Questo significa che sono presenti due distinti gruppi funzionali di flessori plantari: il tricipite surale ed i muscoli perimalleolari.
formata dal muscolo soleo, gastrocnemio medio, gastrocnemio laterale. Questi muscoli sono attivi maggiormente nella fase di appoggio e la loro funzione è connessa con il controllo del ‘momento di avanzamento’. Generalmente l’attività cessa durante la fase di volo. Alcune ricerche hanno chiarito come i muscoli appartenenti a questo gruppo siano simultaneamente attivi nel periodo di transizione tra fase di oscillazione e l’appoggio (Dubo, 1976) particolarmente a velocità elevate (Schiavi, 1983).
Le contrazioni concentriche del gastrocnemio, durante la decelerazione in regimi di elevata velocità, contribuiscono alla decelerazione della tibia.
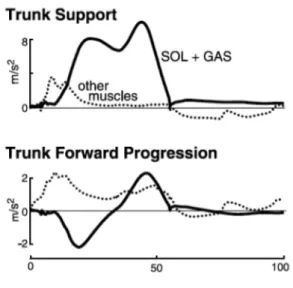
Le ricerche di simulazione dinamica condotte da Neptune (Neptune, 2001) hanno mostrato come i plantiflessori uniarticolari (SOL) assieme ai biarticolari (GM, GL) provvedano al supporto del tronco dal periodo iniziale di appoggio singolo sino al periodo di pre-oscillazione (55% del ciclo di passo), mentre il supporto operato dagli altri muscoli subisce un rapido decremento (fig 4).
Figura 4: Contributo dei muscoli plantiflessori (SOL,GAS) nel supporto del tronco.
Le elevate componenti dei vettori forza dei muscoli soleo (SOL) e gastrocnemio (GAS) nella regione del bacino garantiscono il supporto del tronco attraverso azioni coordinate di accelerezione e decelerazione (fig 5).
Figura 5: Vettori forza dei flessori plantari nel supporto del tronco
In questo modo i muscoli SOL e GAS svolgono un’azione sinergica nel mantenere attivi sia il supporto del tronco che la progressione; tale meccanismo è regolato da fluttuazioni energetiche prima e dopo l’appoggio intermedio.
E’ possibile individuare due distinti compiti di SOL e GAS nella fase finale di appoggio: SOL contribuisce alla progressione del tronco, mentre GAS si occupa della fase iniziale di oscillazione, vale a dire dell’avanzamento dell’arto.
Tra i muscoli del piede ricordiamo i flessori della punta, la cui funzione contribuisce alla stabilità del piede durante il contatto metatarsico.
Importanti sono anche il peroneo e il tibiale posteriore, muscoli antagonisti che controllano principalmente il ribaltamento del piede.
Durante il cammino questo gruppo di muscoli controlla la distribuzione del peso sul bordo laterale del piede nella fase di appoggio e la direzione del piede nella fase di oscillazione.
1.4.b Ginocchio
Il ginocchio ha tre compiti funzionali durante il cammino, due delle quali si realizzano durante l’appoggio: si tratta dell’assorbimento dell’impatto, quando l’arto è sotto carico, e della stabilità in estensione per sostenere il peso del corpo. Nell’oscillazione il ginocchio deve essere flesso rapidamente per l’avanzamento dell’arto.
Il quadricipite è il gruppo muscolare dominante a livello del ginocchio. Esso è costituito da tre capi muscolari che attraversano esclusivamente l’articolazione del
ginocchio: il vasto intermedio (VI), il vasto laterale (VL) e il vasto mediale (VM). Un quarto capo, il retto femorale, (RF) agisce sul ginocchio che sull’anca.
L’attività dei muscoli vasti inizia nell’oscillazione terminale (90% del ciclo di passo). Invece due muscoli monoarticolari, il popliteo (PO) ed il capo breve del bicipite femorale (BFB), determinano direttamente la flessione del ginocchio.
BFB risulta attivo prevalentemente nella oscillazione iniziale ed intermedia (65% ed 85% del ciclo di passo).
I tre muscoli semimembranoso (SEMB), il capo lungo del bicipite femorale (BF) e il semitendinoso (SEMT), sono i principali estensori dell’anca, tuttavia questi muscoli sono meglio conosciuti per il loro ruolo di flessori del ginocchio.
Il muscolo gastrocnemio (GM) è un muscolo accessorio della fase di appoggio a livello del ginocchio, poiché, nonostante agisca principalmente a livello della tibiotarsica, è anche un flessore del ginocchio.
I muscoli gracile (GR) e sartorio (SA) sono muscoli con azione combinata di flessione del ginocchio e dell’anca.
I muscoli quadricipiti sono maggiormente attivi nel periodo di transizione tra oscillazione ed appoggio. L’attività del muscolo vasto intermedio è sincronizzata con gli altri muscoli vasti (vasto laterale e vasto mediale).
La maggiore variazione di attività di questo gruppo di muscoli si riscontra durante il periodo di transizione tra la fase di appoggio ed oscillazione. I risultati di indagine evidenziano i seguenti trends generali:
- a libere velocità di cammino approssimativamente il 67% dei modelli EMG di retto femorale e 45% dei muscoli vasti mostrano attività durante il periodo di transizione tra fase di appoggio ed oscillazione.
- una maggiore attività dei quadricipiti, con l’incrementare della velocità, tende ad estendersi nella fase centrale dell’appoggio e questo è riscontrato nel 40% dei casi.
Brandell (Brandell, 1977), attraverso prove di cammino su tappetino motorizzato ha mostrato come il muscolo vasto mediale abbia predominante attività nella fase centrale e terminale dell’appoggio.
Nella prima fase di attività, corrispondente alla parte iniziale dell’appoggio, i quadricipiti svolgono la funzione di cuscinetto legata alla stabilità del ginocchio e
supportano i carichi dinamici su esso gravanti; successivamente, all’atto dell’estensione del ginocchio, tale attività si stabilizza a bassi livelli.
La seconda fase di attività è anch’essa legata alla stabilità del ginocchio associata con l’accelerazione dell’arto nella parte iniziale dell’oscillazione.
1.4.c Anca
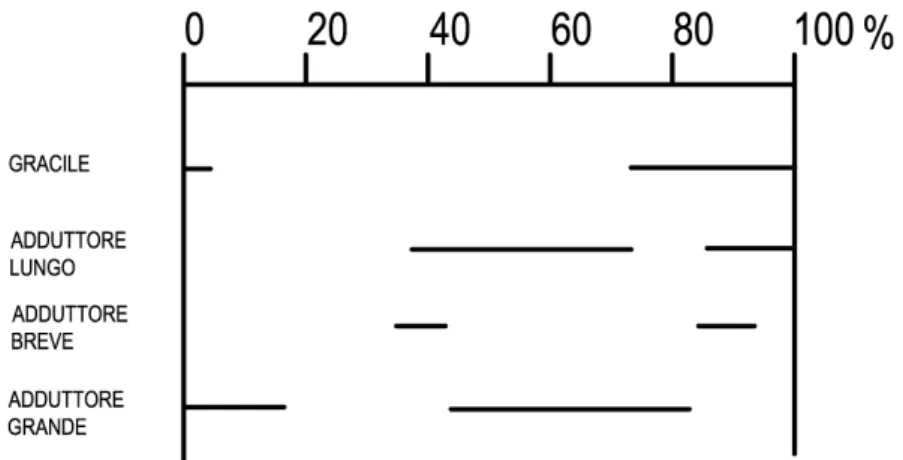
Durante l’appoggio i muscoli principali che controllano l’anca sono gli estensori e gli abduttori; nell’oscillazione sono invece i flessori. Gli adduttori entrano in azione durante i periodi di passaggio dall’oscillazione all’appoggio.
I muscoli che adempiono la funzione di estensori di anca sono, oltre a BF, SEMB, SEMT, il grande adduttore (GAD) e il gluteo massimo (GMAX).
Il gluteo massimo è considerato il principale estensore dell’anca, infatti esso è maggiormente attivo nella fase transitoria tra oscillazione ed appoggio ed contribuisce alla stabilizzazione e l’estensione del bacino (fig 2).
E’ stata inoltre riscontrata una seconda modesta fase di attività nel periodo tra appoggio ed oscillazione (Basmajian, 1978) legata alla stabilità del bacino in seguito alla flessione dell’anca.
Gli abduttori dell’ anca rappresentano l’altro gruppo muscolare principale che si attiva durante la metà iniziale dell’appoggio. Tre muscoli sono coinvolti: il gluteo medio (GMED), il tensore della fascia lata (TFL) ed il gluteo massimo (GMAX).
Tra i flessori di anca mensioniamo l’iliopsas.
La Fig 6 illustra modelli on-off di attività EMG del gruppo di muscoli adduttori.
I muscoli quadricipiti monoarticolari (VAS) e gli estensori dell’anca sono i principali muscoli che contribuiscono al supporto ed alla progressione durante la fase iniziale di appoggio (Neptune, 2002).
Il quadricipite biarticolare (RF) fornisce un significante contributo all’avanzamento nella fase finale di appoggio.
Una importante funzione dei VAS è quella di accelerare il tronco e frenare le gambe all’inizio dell’appoggio (fig 7).
Figura 7: Vettore forza del gruppo VAS nel periodo di appoggio singolo
Nella fase finale dell’appoggio RF è attivo per assistere l’avanzamento del tronco, attraverso la decelerazione delle gambe e l’accelerazione del tronco (fig 8).
Il contributo di RF nella parte terminale dell’appoggio è antagonistico a quello di GAS nell’inizio dell’oscillazione e favorisce il contributo di SOL all’avanzamento del tronco.
2 SEGNALE EMG
Il segnale EMG è il segnale elettrico associato alla contrazione muscolare per effetto dell’attività dei motoneuroni durante l’eccittazione delle fibre muscolari.Il segnale EMG è la migliore rappresentazione osservabile del controllo neurologico sull’’attività del sistema muscolo scheletrico.
Caratteristica del segnale EMG è la tendenza nel mostrare incrementi di ampiezza come risultato di aumenti di attività muscolare volontaria.
Esistono molte variabili in grado di onfluenzare il segnale, tra queste menzioniamo i cambiamenti di velocità di contrazione muscolare e le diverse estensioni muscolari, fenomeni di affaticamento muscolare ed attività di riflesso.
Con un’appropriata strumentazione, questi segnali mioelettrici possono essere registrati ed analizzati al fine di determinare l’attivazione e la relativa intensità dello sforzo muscolare.
Com’è noto, i muscoli sono composti da diverse migliaia di catene di elementi contrattili, ognuna delle quali (definita come fibra muscolare) si trova sotto il controllo neurale diretto, gli elementi contrattili sono detti sarcomeri.
Il controllo è semplificato dal fatto che un singolo neurone attiva un gruppo di fibre muscolari, questa famiglia di fibre muscolari con il proprio neurone di controllo comune ed il motoneurone del midollo spinale viene definita unità motoria.
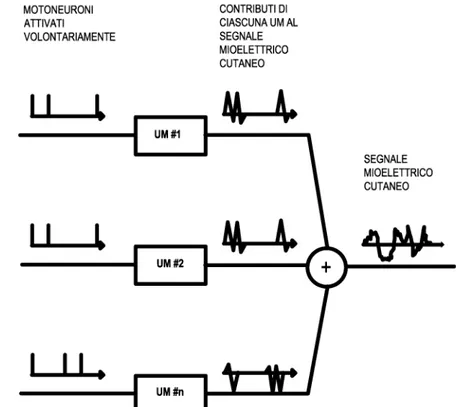
La figura 1 riporta l’insieme costituito da un singolo motoneurone (fibra nervosa motoria composta da cellula ed assone) e da un certo numero di fibre muscolari innervate da placche motorie, generalmente denominata unità motoria (UM).
Figura 1: Unità motoria: motoneurone (viola), mielina (verde) fibre muscolari (roso).
Il segnale elettromiografico (EMG) indica l’attivazione dell’unità motoria. In primo luogo l’intesità dell’attività muscolare è determinata dal numero delle unità motorie che sono attivate. Altri fattori significativi sono rappresentati dalla dimensione, dal tipo di fibre e dallo stato delle unità motorie così come dalla meccanica intramuscolare ed esterna. La conoscenza di queste diverse qualità delle unità motorie è importante per la corretta interpretazione del segnale EMG dei diversi muscoli.
La funzione e la dimensione dei muscoli sembrano influenzare la composizione dell’unità motoria (UM).
Dal confronto dei muscoli di mano e gamba si osserva che mentre i primi, più piccoli, permettono una mobilità fine delle dita, ai secondi è associata la funzione di stabilizzazione piuttosto che di controllo fine, inoltre questi presentano una anatomia dell’unità motoria più grossolana. Per esempio il capo mediale del gastrocnemio contiene 579 unità motorie in una sezione trasversa di 28cm2 e sono presenti 1784 fibre in ciascuna UM. Il muscolo tibiale anteriore, che determina il rapido distacco del piede nell’oscillazione, presenta una dimensione moderata (13.5cm2) contenente 445 UM con 610 fibre muscolari ciascuna.
Un’altra variabile è costituita dalle dimensioni di ciascuna fibra muscolare. La dimensione delle fibre nella gamba è compresa tra 54micron e 57micron.
2.1 Origine del segnale
La comprensione del significato funzionale dell’elettromiografia inizia con la valutazione dell’attività della fibra muscolare. L’eccitazione del muscolo ha origine con l’attivazione chimica da parte dei neuroni delle placche neuromuscolari di ciascuna fibra muscolare, seguita da un segnale elettrico che si diffonde attraverso la fibra alla stessa velocità (2-5m/sec), per cui tutti i sarcomeri si contraggono virtualmente nello stesso tempo. Le fibre muscolari rispondono con una contrazione globale che viene comunemente definita reazione del “tutto o nulla”: se esiste un segnale (EMG), è presente l’attività di una fibra muscolare che genera una forza per iniziare o inibire il movimento.
Il fenomeno della stimolazione delle fibre muscolari per mezzo del controllo dei neuroni può essere spiegato dal modello di una membrana semipermeabile, detta sarcolemma, che ha proprietà elettriche.
Un equilibrio di ioni, tra gli spazi esterni ed interni della cellula muscolare costituisce un potenziale a riposo per la membrana della fibra muscolare (-80mV<>-90mV). Questa differenza di potenziale, che è mantenuta da processi fisiologici, attraverso la pompa sodio potassio, risulta, se confrontata con la superficie esterna, in una carica intracellulare negativa.
L’attivazione di un motoroneurone alpha anteriore al corno di una cellula, indotto dal sistema nervoso centrale (SNC) o da un atto riflesso, risulta nella conduzione dello stimolo lungo il nervo motorio in seguito al rilascio di trasmettitori alle placche motorie.
I gradienti di diffusione della membrana della fibra muscolare sono temporaneamente modificati e gli ioni Na+, diffondendosi all’interno, producono una depolarizzazione che è immediatamente ripristinata da uno scambio inverso di ioni ad opera della pompa ionica.
2.2 Genesi del segnale EMG - il potenziale d’azione –
Se il flusso di ioni Na+ supera una certa soglia, la depolarizzazione della membrana produce un rapido cambiamento nel potenziale d’azione che da -80mV va a +30mV Si tratta di un impulso elettrico che è immediatamente ripristinato dalla
ripolarizzazione e seguito da un successivo periodo di iperpolarizzazione della membrana.
A partire dalle placche motorie, il potenziale d’azione si diffonde attraverso la fibra muscolare in entrambe le direzioni e all’interno attraverso un sistema tubulare.
L’eccitazione comporta un rilascio di ioni Ca2+ nello spazio intracellulare.
I processi chimici coinvolti alla fine producono un accorciamento degli elementi contrattili della cellula muscolare.
Questo fenomeno testimonia la stretta relazione che lega eccitazione e contrazione della fibra muscolare, anche se è possibile che a volte una debole eccitazione può non produrre una contrazione.
2.3 Propagazione del segnale e rilevazione
Il ciclo di depolarizzazione-ripolarizzazione traccia un’onda di depolarizzazione o dipolo elettrico che viaggia lungo la superficie di una fibra muscolare.
Per la misurazione dell’EMG cinesiologico servono elettrodi bipolari e un amplificatore differenziale.
Per semplicità facciamo riferimento allo schema seguente in cui si registra la distribuzione del potenziale di membrana lungo una delle fibre rappresentate ed appartenenti alla stessa unità motoria. (fig 2)
Poiché un’unità motoria consiste di molte fibre muscolari, la coppia di elettrodi registra l’ampiezza di tutte le fibre innervate. Il nome dato a tale segnale elettrico, generato nelle fibre muscolari dal proceso di eccitazione e contrazione, è quello di
potenziale d’azione dell’unità motoria (muap).
Gli elettrodi posti sulla superficie di un muscolo o al suo interno registrano in termini quantitativi il valore del muap che è trasmesso lungo le fibre muscolari in un dato tempo.
La quantità del muap varia in rapporto alla distanza dell’unità motoria dagli elettrodi. Il segnale EMG rappresenta l’attivazione di più unità motorie e, come appare evidente in fig. 3, questa registrazione è costituita da una serie asincrona di potenziali d’azione che appare molto varia in ampiezza e durata a causa sia delle differenze nella distanza dell’elettrodo dalle fibre muscolari, sia della lunghezza dell’assone che si estende sino alle fibre muscolari. I potenziali d’azione di tutte le unità motorie attive descrivibili si sommano e si osservano come un segnale bipolare con distribuzione simmetrica di ampiezze positive e negative e valore medio uguale a zero.
Figura 3: Generazione del segnale EMG risultante dalla somma di più unità motorie
I due meccanismi più importanti che influenzano l’ampiezza e la densità del segnale osservato sono il reclutamento dei ‘muap’ e la loro frequenza di attivazione.
Queste sono le strategie principali del controllo atte a regolare il processo di contrazione e a modulare la forza del muscolo coinvolto.
Per semplificare si può dire che il segnale EMG riflette direttamente i due meccanismi impiegati per incrementare la forza muscolare, vale a dire l’aggiunta di più unità motorie, oppure una più frequente stimolazione delle stesse unità motorie.
2.4 Natura del segnale emg emg grezzo
-Con il termine di segnale EMG grezzo indichiamo il risultato del processo di registrazione dell’attività muscolare.
Il segnale EMG grezzo presenta componenti di rumore, le cui cause possono essere associate a molti fattori, come la qualità dell’amplificatore, il rumore ambientale e la qualità delle condizioni sperimentali.
Il valore del rumore basilare calcolato non dovrebbe essere mediamente > 3-5mV e il target ottimale dovrebbe essere 1-2mV.
L’indagine della qualità dell’EMG basilare è una condizione necessaria per ogni misurazione dell’EMG.
Il muscolo rilassato in perfetta salute non mostra una significativa attività dell’EMG a causa della mancanza di depolarizzazione.
Per sua natura i picchi dell’ emg grezzo sono di forma casuale, ciò significa che una improvvisa esplosione di movimento non può essere riprodotta in una forma esatta, questo è dovuto al fatto che l’attuale set di unità motorie reclutate cambia costantemente con il diametro della fibra di unità motorie utilizzabili: se occasionalmente due o più unità motorie esplodono contemporaneamente e sono localizzate vicino agli elettrodi, esse producono un violento picco di sovrapposizione. Il range in ampiezza dell’ emg grezzo può variare (almeno per gli atleti) da +/- 5mV e la frequenza tipica varia da 6-500Hz, e la banda entro cui si reggistra la potenza massima è raggiunta tra i 20-150Hz circa.
dal segnale EMG grezzo. Non è sufficiente invece per la definizione della relativa forza muscolare, poiché ciascun segnale EMG è in funzione della relazione dell’elettrodo con il muscolo, così come dell’intensità muscolare. Prima di procedere al confronto dell’attività tra i singoli muscoli nei diversi soggetti, la registrazione deve essere quantificata e normalizzata.
2.5 Influenza delle condizioni di indagine e stima del segnale EMG
I fattori che influenzano la corretta rilevazione del segnale EMG sono i seguenti:
1 caratteristiche del tessuto
Il corpo umano è un buon conduttore elettrico, ma sfortunamente (spell check) la conduttività elettrica varia con il tipo di tessuto, inoltre cambiano lo spessore fisiologico cambia e anche la temperatura.
Queste condizioni possono enormemente variare da soggetto a soggetto e perfino nello stesso soggetto e impedire un confronto diretto quantitativo dei parametri di ampiezza di emg calcolati sul segnale di emg non processato.
2 cross talk fisiologico
Muscoli adiacenti possono produrre una quantità di EMG che è captato dall’elettrodo più vicino.
In genere questo cross talk non eccede 10%-15% dell’intero segnale, o addirittura non è rilevabile.
anche picchi di ECG possono interferire con la registrazione soprattutto quando si tratta di muscoli del tronco superiore e della spalla.
3 cambiamenti nella geometria del ventre del muscolo e nella posizione dell’elettrodo.
L’elettrodo deve essere posizionato precisamente tenendo conto della anatomia del muscolo del soggetto da esaminare.
4 rumore esterno
Un’attenzione particolare deve essere tenuta nel caso di ambienti elettrici molto rumorosi, ad esempio quando ci sono dispositivi esterni con una messa a terra non adeguata.
5 elettrodo e amplificatore
La qualità degli elettrodi ed il disturbo interno all’amplificatore possono aggiungere segnali all’EMG di base.
La maggior parte di questi fattori può essere eliminata o controllata da una preparazione accurata ed attraverso buone condizioni di laboratorio, ad esempio isolato da qualsiasi fenomeno di interferenza ambientale.
6 campionamento
Affinchè un segnale EMG possa essere visualizzato e quindi interpretato, esso necessita di essere convertito da analogico a digitale.
Un passo importante è quindi la selezione di una appropriata frequenza di campionamento. Allo scopo di trasferire completamente lo spettro di frequenza di un segnale, la frequenza di campionamento deve essere almeno due volte maggiore della frequenza banda in frequenza del segnale.
Nell’EMG, la massima potenza del segnale è localizzata tra 10-250Hz, e raccomandazioni scientifiche richiedono un settaggio della potenza dell’amplificatore compresa tra 10-500Hz
Questo risulterebbe in una frequenza di campionamento di almeno 1000Hz, o di 1500Hz per evitare perdite di segnale.
7 preparazione della pelle
La qualità delle misurazioni dipende fortemente dalla preparazione della pelle e dal posizionamento degli elettrodi.
Questa procedura ha il risultato di fornire una pelle a bassa impedenza e adatta ad un contatto stabile con l’elettrodo.
I più moderni amplificatori EMG sono progettati per un livello di impedenza della pelle tra 5-50 kOhm (tra coppie di elettrodi).
Per preparare la pelle in condizioni ideali, come per la disposizione degli elettrodi nei siti muscolari, è generalmente eseguito quanto riportato nel protocollo della SENIAM.
8 Scelta degli elettrodi di superficie
Nella maggior parte degli studi del segnale EMG per il loro carattere non invasivo, sono utilizzati elettrodi di superficie. Accanto a questo beneficio, la loro limitazione sta nel rilevare l’attività elettromiografica soltanto dei muscoli superficiali, mentre per i muscoli posti più in profondità o coperti da ossa sono necessari elettrodi invasivi, tipicamente ad ago.
Gli elettrodi di superficie sono in argento entro matrice di cloruro, di diametro conduttivo 1cm.
Commercialmente ci sono due tipi di elettrodi, quali elettrodi gel-bagnati o adesivi. Generalmente i primi hanno impedenza minore e sono adatti per applicazioni successive.
Figura 4: Elettrodi Ag-AgCl
Il tipo di elettrodo Ag–AgCl consiste in un disco di schiuma di materiale plastico con un disco argentato da un lato, attaccato ad un bottone argentato tipo clip .
Il disco è la parte che funziona da elettrodo, può essere ricoperto da uno strato di AgCl, ricoperto a sua volta da uno strato di pasta elettrolitica e da materiale adesivo compatibile con la pelle. Uno strato di pellicola protegge il tutto e viene tolto solo al momento di utilizzare l’elettrodo.
I segnali EMG sono troppo piccoli per l’intrpretazionediretta, perciò devono essere impiegato un amplificatore differenziale con un’elevata proporzione di scarto (valori maggiori di 80db). Questo tipo di amplificatore riduce l’interferenza dei segnali che derivano dalle sorgenti comuni come le linee elettriche di energia. L’impedenza in ingresso deve essere elevata (almeno 1Mohm) per cogliere adeguatamente i segnali EMG di basso livello.
Nella scelta dell’amplificatore si deve considerare il contenuto in frequenza dei segnali: lo spettro di base dei segnali mioelettrici include frequenze comprese tra 10 e 1000Hz.
Al fine di mantenere la qualità e la quantità del segnale, l’amplificatore selezionato deve possedere una larghezza di banda che copra l’escursione della frquenza dei segnali mioelettrici ottenuti con il sistema di elettrodi prescelto.
Falsi segnali (artefatti) indotti da movimento dei tessuti molli e rumore elettrico sono esclusi mediante le modificazioni dello spettro.
3 MATERIALI E METODI 3.1 Protocollo
Il lavoro è stato condotto coinvolgendo cinque soggetti giovani (età: 24.4±2.3) e cinque soggetti anziani (età: 70.4±5.3), sani, ai quali è stato illustrato l’obiettivo del lavoro e le modalità di esecuzione della prova. Ai soggetti è stato chiesto di camminare su di un treadmill a velocità costante di 0.3 m/s. Durante la prova sono stati acquisiti i segnali EMG di sei coppie di muscoli (Tibiale anteriore, TA, Gastrocnemio laterale, GL, Soleo, SOL, Retto femorale, RF, Vasto mediale, VM, Bicipite femorale, BF) appartenenti ad entrambe le gambe (fig. 1), in modo da considerare le asimmetrie funzionali del cammino.
Gli eventi temporali del ciclo di passo, heel strike (HS) e toe off (TO), sono stati identificati utilizzando dei micro pulsanti posti sotto il tallone e l’alluce. La figura 2 sintetizza la modalità di esecuzione della prova.
Figura 2: Setup sperimentale
1 Trasmettitore Wireless NORAXON; 2 Computer per la registrazione dei dati EMG inviati da NORAXON; 3 Sensore HS; 4 Sensore TO; 5 Treadmill; 6 Elettrodi muscoli gamba destra; 7 Elettrodi muscoli gamba sinistra.
I segnali EMG sono stati acquisiti mediante un elettromiografo NORAXON a 16 canali, attraverso elettrodi attivi KENDALL (ARBO*, EMG electrodes, H92SG) applicati sulla cute della pelle, precedentemente pulita, in prossimità delle pance muscolari e quindi fissati con elastici in modo da evitare artefatti. Il piazzamento degli elettrodi è scelto in modo da minimizzare il cross-talk tra muscoli adiacenti, durante massime contrazioni isometriche, secondo quanto indicato dalla procedura SENIAM. La distanza tra gli elettrodi nei punti di inserzione è di 2 – 3 cm disposti lungo la direzione delle fibre muscolari.
E’ stata adottata una frequenza di campionamento pari a 1000 Hz, ed un guadagno dell'amplificatore pari a 1000. Per ciascuna prova e per ciascuna gamba, i segnali relativi a ciascun passo sono stati identificati prendendo come riferimento due HS
passo, è mostrato in figura 3.
I dati sono sono stati pre-processati in accordo con i metodi più accreditati (Merkle LA., 1998) e post-processati con l’Analisi Fattoriale. Gli algoritmi di calcolo sono stati svolti per mezzo del software MATLAB.
3.2 Pre-processamento
Una volta che il segnale EMG è stato prelevato (fig 4), esso si presta utile per una interpretazione temporale, ma necessita di ulteriori processamenti al fine di rendere le registrazioni dei vari muscoli correlabili tra loro e consentire una migliore lettura.
Figura 4: Segnale EMG relativo ai muscoli BFdx, GMdx, SOLdx, RFdx, VMdx, TAdx, prelevati a v=0.3m/sec
Il trattamento di pre-processamento ha coinvolto le seguenti fasi principali:
3.2.a Filtraggio
il segnale è stato filtrato con un filtro di Butterworth del 4°ordine, passa banda (30-500 Hz) (fig. 5). Scopo principale dell’operazione di filtraggio è ottenere un segnale più pulito privo di componenti di disturbo quali rumore e fenomeni di cross-talk.
3.2.b Rettifica
Attraverso l’operazione di rettifica il segnale EMG grezzo, che si presenta con valore medio di zero, risulta completamente trasposto in valore assoluto. Si veda ad esempio la fig. 5 che illustra il risultato di questo procedimento applicato al muscolo Vasto Mediale (VM). Una stima visuale delle variazioni di ampiezza dell’onda rettificata provvede a dare indicazioni dei cambiamenti dei livelli di contrazione muscolare. L’unità di ampiezza del segnale rettificato è ancora espressa in mV.
3.2.c Filtraggio a media mobile
Successivamente all’operazione di rettifica si è proceduto con un filtro a media mobile su di un periodo di 22.5 ms. I risultati sono mostrati in fig. 5.
Figura 5: Fasi di processamento del segnale EMG relativo al muscolo vasto mediale.EMG grezzo (colore blu), EMG filtrato con filtro Buttherworth (colore verde), EMG rettificato (colore rosso), EMG filtrato a media mobile (colore nero).
3.2.d Normalizzazione
I dati elaborati, così come descritto in precedenza devono essere ulteriormente ridotti e resi omogenei per permetterne il confronto. Una tecnica sperimentale ampiamente adottata consiste nella normalizzazione dell’attività dei singoli segnali muscolari rispetto al valore massimo del segnale all’interno del ciclo di passo.
Dai segnali EMG ricavati in ciascuna prova, tenendo come punto di riferimento l’HS, sono stati estratti 11-13 cicli di passo (fig. 4). Il tempo medio di durata del ciclo di passo è stato ricavato mediando gli 11-13 cicli di passo (fig. 5).
Dopo il filtraggio a media mobile, ogni segnale è stato normalizzato in ampiezza, rapportandolo al proprio valore massimo.
Figura 5: Individuazione degli istanti temporali del ciclo di passo.
3.2.e Media
Per ciascuno sei segnali EMG sono stati estratti 21 punti per ogni ciclo di passo, distanziati del 5% della durata del passo stesso; successivamente, si è proceduto mediando i 21 punti su tutti i passi (fig. 8) (Yang e Winter, 1984).
Attraverso tale tecnica è stato possibile mantenere le componenti spazio-temporali della forma d’onda.
Per entrambi i gruppi (giovani ed anziani) le matrici sono state incolonnate in modo da ottenere due matrici di dimensioni 105 (gli istanti temporali per il numero di soggetti) x 12 (muscoli), (fig. 7) che sono state processate successivamente mediante l’Analisi Fattoriale (Norman-Streiner, 2000).
3.4 Post-processamento
L’utilità e l’importanza dell’AF, come metodo statistico per identificare i modelli di attivazione neuromuscolari che contribuiscono alla locomozione, è stata applicata con successo da alcuni studi (Wootten et al., 1990; Davis & Vaughan, 1993; Olree & Vaughan, 1995). Tali studi hanno dimostrato l’esistenza di fattori in grado di evidenziare quei segnali fondamentali generati da SNC per controllare i principali gruppi di muscoli coinvolti nel cammino.
In questo studio l’applicazione dell’AFè finalizzata all’estrazione di comuni forme d’onda condivise da un set di dati EMG normalizzati all’interno del ciclo di passo. L’AF è uno strumento statistico che, a partire da una mole elevata di variabili, le raggruppa in base al “carattere” ossia all’attitudine a descrivere lo stesso fenomeno. Questo consente di ridurre la complessità del problema facilitando l'interpretazione dei risultati. Affinché il metodo favorisca il raggruppamento delle variabili, è necessario che esista una correlazione, anche dell’ordine di 0,3-0,4, fra le coppie di dati. L’assenza di correlazione, banalmente, non consentirebbe di attribuire lo stesso carattere a parametri diversi, per cui procedere con l’analisi fattoriale non produrrebbe risultati utili.
Dopo la verifica della correlazione, si implementa la Analisi delle Componenti Principali (PCA) uno strumento, che ha anch'esso lo scopo di ridurre la complessità dell'insieme dei dati. La PCA processa la matrice dei dati di partenza, chiamata Mrxc,
realizzando una trasformazione della stessa in uno spazio vettoriale di pari dimensioni, secondo la Nrxc=Mrxc Tcxc, con ovvio significato dei simboli. L'algoritmo di
calcolo della PCA consente, successivamente, di scegliere la dimensione dei dati di uscita, in accordo con la variabilità spiegata dagli stessi. In altri termini, a partire da
Tcxc, la PCA consente di estrarre la sottomatrice Tcxp, con p minore di c, tale che la
variabilità contenuta nella matrice Mrxc, sia, in massima parte, mantenuta nella
Figura 9: Trasformazione dimensionale di PCA.
In particolare, la scelta del numero p, dimensione dello spazio di arrivo della trasformazione, viene individuato sulla base della variabilità cumulativa percentuale che si ritiene sufficiente, oppure adottando il criterio dell'autovalore pari a 1. Quest'ultimo consiste nello scegliere la dimensione dello spazio di arrivo pari al numero di autovalori della matrice Tcxc che siano maggiori o uguali ad 1. Le colonne
della matrice Nrxp vengono dette Componenti Principali, mentre la matrice Tcxp viene
definita Matrice dei pesi. Questo processo fa sì che ciascuna delle variabili di partenza possano insistere su più Componenti Principali, rendendo ancora complessa l'interpretazione dei risultati.
L'AF rappresenta, l’ultimo passo dell'intero algoritmo; essa si realizza applicando una “rotazione” alla matrice Tc.
Con la rotazione della matrice Tc si ottiene una interpretazione migliore dei pesi
assegnati a ciascun fattore.
Esistono varie tecniche di rotazione ortogonale e tra queste è stata utilizzata la ‘varimax’. Nella rotazione ortogonale gli assi matematici sono ruotati in modo da ridurre la complessità fattoriale, ossia permettere una equa distribuzione delle variabili all’interno dei fattori.
Obiettivo della AF è estrarre quei fattori Fj in grado di catturare le correlazioni
esistenti tra le variabili originali Xi.
Il modello generale di AF è di seguito espresso:
Xi = ai1F1 + ai2F2 + ··· + aimFm + ei
Dove con Xi sono indicate le variabili originali (i=1,…,n), aij i pesi che esprimono le
correlazioni tra le variabili Xi, Fj (j=1,…,m<n) i fattori, ed ei è un fattore specifico
soltanto per Xi.
Attraverso la fase di estrazione dei fattori si arriva ad una serie di combinazioni lineari delle variabili che definiscono il valore di ciascuno di essi. I pesi aij per il primo
fattore sono scelti in modo tale da essere capaci di esprimere il massimo della variabilità nel campione, ed i pesi per i rimanenti fattori sono calcolati in modo che ogni fattore non sia correlato con gli altri e che illustri di volta in volta una variabilità sempre minore dei precedenti fattori. Perciò, esistendo una struttura fattoriale per i dati considerati, la maggior parte della variabilità viene spiegata già dai primi fattori. L’obiettivo della fase di estrazione dei fattori è arrivare a una serie di combinazioni lineari delle variabili che definiscono ciascun fattore, quindi ciascuna sinergia.
Decidere quale sia il numero di fattori da mantenere nelle fasi successive è una delle scelte più importanti.
Nel presente studio si è seguito il test dell’ ‘autovalore >= uno’, criterio largamente utilizzato.
L’autovalore è definito come un indice di variabilità: ogni fattore produce un autovalore che rappresenta la quantità di variabilità spiegata da quel fattore.
Nei componenti principali la varianza totale è uguale al numero totale di variabili: per esempio avendo considerato 12 variabili (segnali EMG), la varianza totale sarà pari a 12.
Principale obiettivo della rotazione dei fattori è aiutare a capire che cosa succede ai fattori. Perché l’interpretazione dei fattori sia semplice, la matrice dei pesi fattoriali dovrebbe soddisfare quattro condizioni:
- la variabilità spiegata deve essere ben distribuita tra i fattori. - ogni variabile deve ‘pesare’ su un solo fattore.
- i pesi fattoriali devono essere prossimi a 1 o a 0 o a -1
- i fattori devono essere unipolari (tutte le variabili forti devono avere lo stesso segno).
4. RISULTATI
4.1 Analisi Fattoriale
In Tab 1 sono riportate le matrici di correlazione dei segnali muscolari relative al gruppo giovani ed anziani. L’estrazione della matrice di correlazione ha fornito una prima omogeneità del problema trasformando le variabili in punteggi standard, in cui i termini 1 sulla diagonale principale stanno a significare che ogni variabile è perfettamente correlata con sè stessa.
L’indagine relativa alla matrice di correlazione ha comportato la ricerca di comportamenti sistematici all’interno delle matrici (Tab 1.a,.b) di 12x(12-1)/2 singole correlazioni, ovvero 66.
Tabella 1.b: Matrice di correlazione gruppo anziani
Al fine di assicurare la corretta applicazione dell’analisi fattoriale e di procedere con l’estrazione dei fattori, sono state verificate l’adeguatezza generale delle matrici attraverso la Misura di Adeguatezza del Campione (KMO) ed il Test di Sfericità di Bartlett. Il KMO, misurando l’adeguatezza del campione, consente di verificare quali variabili non si stanno esprimendo al massimo. Generalmente l’indicatore KMO dovrebbe essere 0.5 o più grande. La misura effettuata sulle matrici di correlazione è stata di 0.56, rivelando perciò l’adeguatezza del campione per l’analisi fattoriale. L’indice di comunanza media (R2 ) delle variabili, ricavata dai fattori estratti, è stata di 0.93 per il gruppo degli anziani, contro un valore di 0.71 per quello dei giovani. Per entrambi i gruppi i valori di R2 stanno a significare che ciascun muscolo scambia una moderata porzione di varianza comune con gli altri, e tale dato è tanto più rilevante negli anziani in cui R2 , essendo uguale a 0.93 indica che una singola variabile può essere sufficientemente stimata a partire dalle altre.
Il test di sfericità di Bartlett testa l’ipotesi che le matrici di varianza e covarianza siano matrici identità. I valori ricavati col test di sfericità (62, p<0.05) hanno incoraggiato l’utilizzo dell’analisi fattoriale per l’estrazione dei fattori.
In base al criterio dell’autovalore pari ad uno, sono stati estratti quattro fattori in grado di spiegare rispettivamente nei giovani e negli anziani l'81% e 96% della variabilità dell'insieme dei dati (Fig 1).
0 10 20 30 40 50 60 70 80 90 100 1 2 3 4 5 6 7 8 9 10 11 12
FATTORE
VARIANZA CUMULATIVA
%
ANZIANIDa ognuno dei due gruppi sono stati estratti 4 fatttori. Considerando il gruppo dei soggetti giovani, il totale dei fattori mantenuti nell’analisi esplica l’81% di varianza totale nei dati, mentre nel gruppo degli anziani i quattro fattori contano approssimativamente il 96% della varianza totale (Tab 2.a,.b).
Tabella 2.a: Statistiche di inizio estrazione fattori (gruppo giovani)
Tabella 2.b: Statistiche di inizio estrazione fattori (gruppo anziani)
FATTORI EIGENVALUE VARIANZA% VARIANZA CUM%
1 6.732 61.04 61.04 2 2.276 18.96 80.00 3 1.283 10.69 90.69 4 1.150 5.00 95.69 5 0.231 1.98 97.67 6 0.107 0.89 98.56 7 0.077 0.56 99.12 8 0.056 0.38 99.50 9 0.032 0.27 99.77 10 0.028 0.15 99.92 11 0.007 0.06 99.98
FATTORI EIGENVALUE VARIANZA% VARIANZA CUM%
1 4.373 39.11 39.11 2 2.739 24.39 63.50 3 1.272 10.60 74.10 4 1.127 7.10 81.20 5 0.735 5.28 86.48 6 0.506 4.22 90.70 7 0.474 3.95 94.65 8 0.348 2.07 96.72 9 0.200 1.67 98.39 10 0.154 0.95 99.34 11 0.040 0.40 99.74
La rotazione varimax ha provveduto ad una migliore distribuzione di variabilità tra i fattori (fig 2).
Figura 2: Rotazione varimax dei pesi fattoriali. Gruppo giovani (colore rosso), gruppo anziani (colore blu).
Le tabelle 3 mostrano le matrici dei pesi fattoriali.
Tabella 3.a: Matrice pesi fattoriali (gruppo giovani)
Tabella 3.b: Matrice pesi fattoriali (gruppo anziani)
Il punteggio (peso) assegnato ad ogni fattore rappresenta il grado di correlazione tra
Variabile Fattore1 Fattore2 Fattore3 Fattore4
BFdx -0,42 0,28 0,84 -0,16 GMdx 0,06 -0,33 -0,53 0,78 SOLdx 0,67 -0,18 -0,28 0,26 RFdx 0,01 0,34 0,6 -0,29 VMdx -0,29 0,74 0,27 -0,31 TAdx 0,4 0,25 -0,07 0,16 BFsx 0,01 0,09 0,66 -0,06 GMsx 0,77 -0,13 -0,15 0,01 SOLsx 0,78 0,09 0,16 -0,11 RFsx 0,5 0,72 0,37 -0,16
Variabile Fattore1 Fattore2 Fattore3 Fattore4
BFdx 0,32 0,32 0,81 -0,32 GMdx 0,34 0,89 0,21 0,04 SOLdx 0,48 0,84 0,09 0,12 RFdx 0,91 0,3 0,12 0,21 VMdx 0,98 0,12 0,1 0,1 TAdx 0,6 0,2 -0,15 0,6 BFsx -0,17 0,19 0,96 0,07 GMsx 0,04 0,9 0,24 0,23 SOLsx 0,55 0,73 0,15 0,36 RFsx 0,87 0,32 -0,12 0,26
I risultati della AF sono illustrati in figura 3.
Separando i dati relativi agli arti, si osserva che il gruppo degli anziani, rispetto a quello dei giovani, mostra una distribuzione maggiormente simmetrica dei pesi fattoriali.
Figura 3: Pesi fattoriali relativi ai gruppi giovani (rosso) ed anziani (blu) in cui ciascuno degli istogrammi si riferisce ad un fattore. In rosso e in blu, sono rappresentati, rispettivamente, i dati relativi ai soggetti giovani e quelli relativi ai soggetti anziani.
I fattori sono descritti nel dettaglio, di seguito:
− Fattore 1: negli anziani i muscoli che insistono su questo fattore sono prevalentemente gli estensori del ginocchio (RF e VM) e a seguire, mantenendo una