CAPITOLO 3
IL SIMULATORE DI GUIDA UTILIZZATO NEL
PROGETTO DI RICERCA
3.1 INTRODUZIONE
Nel corso dei tre anni del progetto di ricerca è stato utilizzato il simulatore di guida sviluppato presso il Dipartimento di Ingegneria Meccanica, Nucleare e della Produzione nell’ambito di precedenti progetti di ricerca [1].
Il candidato ha curato, in particolare, l’upgrade del sistema grafico che ha consentito, unitamente al potenziamento del sistema dal punto di vista meccanico, seguito direttamente dallo stesso DIMNP, di ottenere una nuova versione completa funzionante adatta allo svolgimento di campagne di prove di guida sperimentali con possibilità di monitoraggio e salvataggio sia dei segnali relativi agli input del conducente (angolo e coppia volante e posizione pedali freno e acceleratore), che di tutti i segnali inerenti la dinamica del veicolo (traiettoria, componenti di velocità e accelerazione, angoli di rollio, beccheggio, imbardata, rpm motore ecc.) [2].
Il simulatore di guida del DIMNP si presenta a base statica, vale a dire con postazione di guida fissa, ed è caratterizzato da un unico canale video di proiezione frontale, attraverso il quale è possibile riprodurre uno scenario grafico tridimensionale.
Il sistema è stato collocato in un locale appositamente dedicato, con pareti scure per permettere una migliore visualizzazione delle immagini proiettate sullo schermo.
Nel dettaglio, il laboratorio di simulazione prevede:
- la postazione di guida strumentata (Figura 1b), per l’acquisizione degli input del conducente;
Figura 1: a) Telaio del veicolo per la ricostruzione dell’abitacolo- b) Postazione di guida strumentata
- i computer dedicati alla gestione delle prove, in numero pari a 4, connessi tramite una rete locale con protocollo UDP;
- la postazione di controllo (Figura 2), dalla quale un operatore può seguire la simulazione ed eventualmente intervenire sulla stessa.
-
Figura 2: Postazione di controllo
- il sistema di riproduzione video, composto da un video proiettore e da uno schermo frontale;
- il sistema di riproduzione audio, del tipo 2.1; - le componenti hardware.
3.2 ARCHITETTURA DEL SIMULATORE E COMPONENTI HARDWARE
3.2.1 Generalità
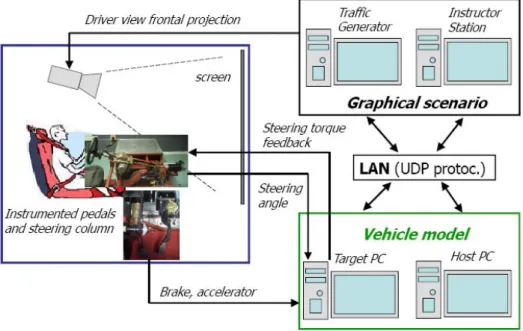
Dal punto di vista dell'architettura del sistema, il simulatore si presenta come illustrato in Figura 3.
Figura 3: Schema a blocchi del funzionamento del simulatore di guida.
Il driver interagisce con il simulatore tramite degli ingressi tipici di un veicolo con trasmissione automatica: il volante ed i pedali acceleratore e freno.
Allo stesso tempo il conducente avverte la sensazione di movimento per mezzo della vista frontale, il rumore del motore e le reazioni prodotte sul volante (feedback attivo). E’stato inoltre riprodotto l’abitacolo attraverso l’utilizzo di un telaio reale di una Fiat Panda e, all’interno di esso, sono stati realizzati tutti gli elementi di input caratteristici di una vettura reale.
I pedali ed il volante sono caratterizzati da sensori che permettono l’acquisizione degli input del conducente durante la simulazione; sul piantone dello sterzo, in particolare, un motore elettrico applica la coppia calcolata dal modello di veicolo.
3.2.2 Computer e uso dati
Alla base del funzionamento del simulatore ci sono quattro PC che gestiscono la simulazione in tempo reale, l'acquisizione dei dati, il flusso delle informazioni per
aggiornare lo scenario grafico e tutte le attività necessarie per lo svolgimento della guida simulata. I quattro personal computer, connessi in una rete locale, vengono identificati nel modo seguente:
- Target PC (TPC); - Host PC (HPC);
- Traffic Generator (TG); - Instructor Station (IOS).
I primi due, Host PC e Target PC, sono dedicati, rispettivamente, allo sviluppo del modello di veicolo e alla sua simulazione in tempo reale. In particolare, l'Host PC viene utilizzato per lo sviluppo del modello dinamico del veicolo in Matlab/Simulink e il monitoraggio e la registrazione dei dati durante la guida simulata.
Il Target PC è invece dedicato alla simulazione in tempo reale del modello, che vi viene trasferito dall'Host PC all'avvio della simulazione, utilizzando il toolbox xPC Target di Matlab.
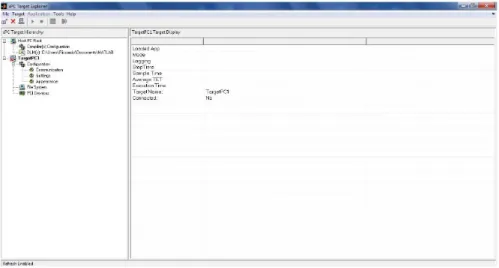
Per consentire la simulazione in tempo reale, in questo PC viene installato un sistema operativo apposito, il modello viene compilato in linguaggio C, utilizzando il Realtime Workshop toolbox di Matlab. Il modello, una volta compilato, viene inviato al PC di destinazione utilizzando il toolbox di matlab XPC Target, che ha una interfaccia utente grafica visualizzata nella Figura 4.
Figura 4: Interfaccia xPCTarget
Sfruttando i comandi dell’XPC Target è possibile controllare la simulazione in tempo reale direttamente dall’host PC: in particolare, è possibile impostare i parametri di
comunicazione tra i due PC, controllare la comunicazione in rete dei PC una volta che questi vengono collegati, caricare un nuovo modello di veicolo, avviare e interrompere la simulazione, monitorare alcune variabili di output e modificare i parametri del modello. Il Target PC è stato anche dotato di scheda di acquisizione National Instruments per poter acquisire i segnali di ingresso del conducente (pedali e sterzo) e per l'invio del segnale di controllo del feedback al piantone di sterzo.
Figura 5: Scheda di acquisizione NI e connettori
Il Target PC invia in rete agli altri computer, inoltre, i segnali necessari per l'aggiornamento dello scenario grafico (coordinate di posizione e orientamento del veicolo rispetto a un sistema di riferimento fisso, comune a quello dello scenario grafico) e per il salvataggio dei dati della guida. Come si vedrà in seguito, poiché il modello di veicolo è in grado di fornire un largo spettro di segnali relativi al moto (componenti di posizione, velocità ed accelerazione lineari e angolari ecc.) e ai principali sottosistemi del veicolo (trasmissione, sospensioni, pneumatici ecc.), tutte queste informazioni vengono inviate in rete e sono acquisite e salvate dall'Host PC: durante la simulazione queste grandezze sono visibili dall'operatore della postazione di controllo.
Gli altri due computer, Traffic Generator e Instructor Station, sono dedicati alla generazione e proiezione dello scenario grafico (sviluppato da Antycip Simulation s.r.l.) e alla gestione di variabili ambientali dello scenario stesso, come i veicoli, i pedoni, i parametri ambientali ed il suono. Questi segnali saranno descritti in seguito nel paragrafo ad essi dedicato. Il software utilizzato per la grafica è in grado di fornire anche la distanza,
valutata sul piano stradale tra la posizione del baricentro del veicolo e la mezzeria della corsia sulla quale si trova l'auto. Questo segnale, che non è normalmente disponibile a bordo di un veicolo, viene registrato insieme agli altri dati.
L'Instructor Station riceve dal TargetPC gli stessi segnali che sono inviati al Traffic Generator ed è adibito al controllo della prova: è possibile visualizzare lo scenario grafico secondo diverse modalità ed è possibile controllare le condizioni ambientali quali la luminosità del cielo in base all'ora durante il giorno, la presenza di pioggia e/o di nebbia (per effettuare prove con visibilità ridotta o con bassa aderenza). E’ possibile variare le condizioni di traffico e si possono inoltre comandare degli eventi improvvisi. Questo PC, così come l'Host PC, è alloggiato nella postazione di controllo.
La connessione tra i PC, come già premesso, è basata sul protocollo UDP (User Datagram Protocol), che essendo più snello del protocollo TCP/IP, è più indicato in applicazioni real time.
La trasmissione dei dati sulla rete avviene a 100 Hz, mentre il modello viene simulato a 400 Hz.
Tabella 1: Flussi di dati e frequenze
Simulazione modello 400 Hz
Invio dati a Host PC 100 Hz
Invio dati a Traffic Generator PC 100 Hz Invio dati a Instructor Station 100 Hz
3.2.3 Postazione di guida strumentata
La postazione di guida strumentata, come già premesso, riproduce l'interfaccia uomo-macchina di un autoveicolo con cambio automatico.
Il guidatore interagisce col simulatore agendo sul volante e sui pedali di acceleratore e freno e, in tempo reale, percepisce le condizioni di moto del veicolo dalla vista frontale proiettata su un unico schermo, dal rumore riprodotto dal sistema audio e dal feedback di coppia sullo sterzo. La postazione di guida, chiaramente visibile in Figura 4a è stata realizzata per riprodurre la geometria dell'abitacolo di un veicolo reale; per questo è stato utilizzato il sedile di un autoveicolo, che permette la possibilità di regolazione della distanza dal volante e dell'altezza, ed il telaio di una FIAT Panda per la ricostruzione dell’abitacolo (Figura 4b).
Figura 4: a) Postazione di guida strumentata – b) Riproduzione abitacolo con telaio reale
Si prevede di sviluppare ulteriormente la cabina del conducente attraverso la realizzazione di un cruscotto fisico (attualmente riprodotto in sovrapposizione allo scenario grafico, come visibile in Figura 4b) e tre specchietti retrovisori attraverso piccoli schermi piatti della dimensione di 7”.
La piattaforma di guida è stata progettata per riprodurre le caratteristiche geometriche di una vera automobile. Le dimensioni della Fiat Idea (auto commerciale di piccola/media
dimensione) sono state considerate come riferimento insieme alla Normativa SAE J1100-JUN84 (1984) inerente il design ergonomico[3].
La posizione del volante è regolabile e consente di cambiare l'angolo di inclinazione e la distanza dal posto di guida.
La struttura principale della piattaforma di guida è composta di tubi quadrati saldati di misura 30 mm x 2 mm di spessore. Pannelli di rivestimento in legno sono stati utilizzati come appoggio per i piedi del conducente, in modo da garantire il comfort per il piede sinistro che non viene utilizzato, e per motivi di sicurezza.
Questa struttura, progettata prima di questo lavoro di ricerca, (cfr. [3] per i dettagli) supporta i pedali, il sistema di sterzo con il motore elettrico per la coppia di retroazione (e il suo convertitore), il blocco connettore della scheda di acquisizione, un generatore di corrente continua e il Target PC.
3.2.4 Pedali
I pedali dell'acceleratore e del freno, mostrati in Figura 6, sono stati dotati di potenziometri angolari atti a misurare l'angolo percorso da ogni pedale durante la simulazione.
Figura 6: a) Pedali acceleratore e freno – b) Generatore corrente continua
Questa misura è utilizzata come segnale di riferimento per le posizioni dei pedali nel modello di simulazione del veicolo.
Questi segnali analogici dei potenziometri sono acquisiti dalla scheda di acquisizione collegata al Target PC, come già detto precedentemente.
All'interno del modello di simulazione del veicolo, i segnali acquisiti in Volt vengono convertiti in segnali compresi in un range variabile tra 0 e 1.
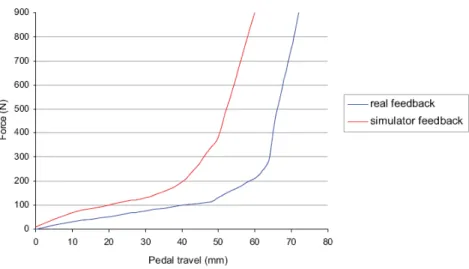
Al fine di riprodurre il comportamento reale i pedali dell'acceleratore e del freno sono stati dotati di sistemi di feedback:. si tratta, in particolare, di sistemi di retroazione passivi, basati sull'impiego di molle elicoidali e silent-block. Il pedale dell'acceleratore ha il sistema di feedback originale, identico a quello installato su veicolo; per il pedale freno è stato invece sviluppato un sistema di feedback basato su una molla elicoidale e un elemento in gomma per riprodurre il fine corsa, al fine di ottenere una risposta simile a quella rilevata su un veicolo reale; tale risposta in realtà è determinata anche dall'impianto frenante.
I risultati del ritorno di forza dei pedali del sistema di simulazione rispetto ad un veicolo reale sono rappresentati in Figura 7.
Figura 7: Ritorno di forza – Confronto tra veicolo reale e modello di simulazione
3.2.5 Sistema di sterzo
Il sistema di sterzo del simulatore di guida è mostrato nella Figura 8 e si caratterizza dei seguenti elementi:
- volante;
- piantone di guida con servosterzo elettrico (attualmente disabilitato); - unità di sterzo;
- motore elettrico per il feedback di coppia.
Figura 8: Sistema di sterzo della postazione di guida strumentata. A destra è visibile il motore elettrico di feedback; in prossimità del volante si ha il servosterzo.
L'unità di servosterzo (EPS), anche se attualmente disabilitata, è stata necessaria durante lo sviluppo del sistema per correggere la Coppia e produrre una sensazione più realistica per il conducente. Durante il progetto di ricerca, al fine di migliorare il sistema, è stato introdotto un sistema attivo di feedback attraverso un motore elettrico brushless che ha portato alla disattivazione dell’unità e alla misurazione dei parametri del volante, e dell’angolo di sterzata in particolare, direttamente dal convertitore del motore elettrico. Lo sterzo servoassistito può essere, ovviamente, implementato nel veicolo ogni volta che si si ritiene necessario.
Il prossimo passo sarà quello di rimuovere fisicamente l'EPS e la colonna dello sterzo e di collegare il motore direttamente sull'albero del volante.
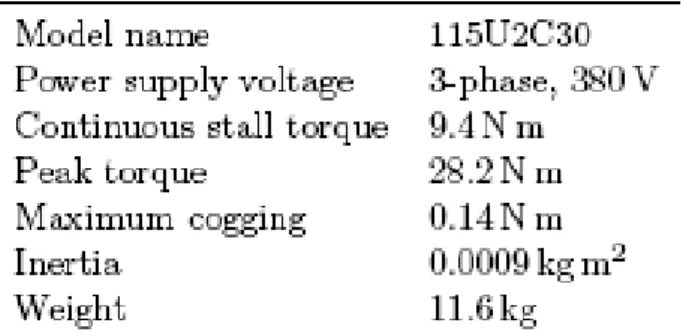
Le caratteristiche principali del motore elettrico utilizzato sono riportate in Tabella 2:
Tabella 2: Caratteristiche principali del motore elettrico brushless
Questo tipo di motore elettrico è stato considerato il più adatto a questa applicazione e viene utilizzato anche per misurare l’angolo di sterzata delle ruote.
3.2.6 Postazione di controllo
Le simulazioni sono sempre monitorate da un operatore attraverso la postazione di controllo: questa stazione permette di controllare tutti gli elementi del simulatore utilizzando l’host PC e l’Instructor Station PC.
In particolare la postazione di controllo permette di:
- controllare il modello di simulazione del veicolo (PC host); - acquisire i dati della simulazione;
- variare i parametri del modello di simulazione; - variare le condizioni ambientali della simulazione; - comandare eventi improvvisi.
Oltre a controllare il modello di simulazione del veicolo, l'operatore presso la postazione di controllo è in grado di monitorare il comportamento del veicolo graficamente attraverso l’Instructor Station. Per quanto i parametri ambientali, allo stato attuale è possibile comandare eventi come la pioggia e la nebbia o variare la luminosità in funzione dell’ora del giorno (Figura 10).
Gli sviluppi futuri prevederanno il controllo delle condizioni di circolazione, sia veicolare che pedonale.
Figura 10: Esempio di guida in presenza di nebbia e monitoraggio grafico
3.2.7 Sistema di visione
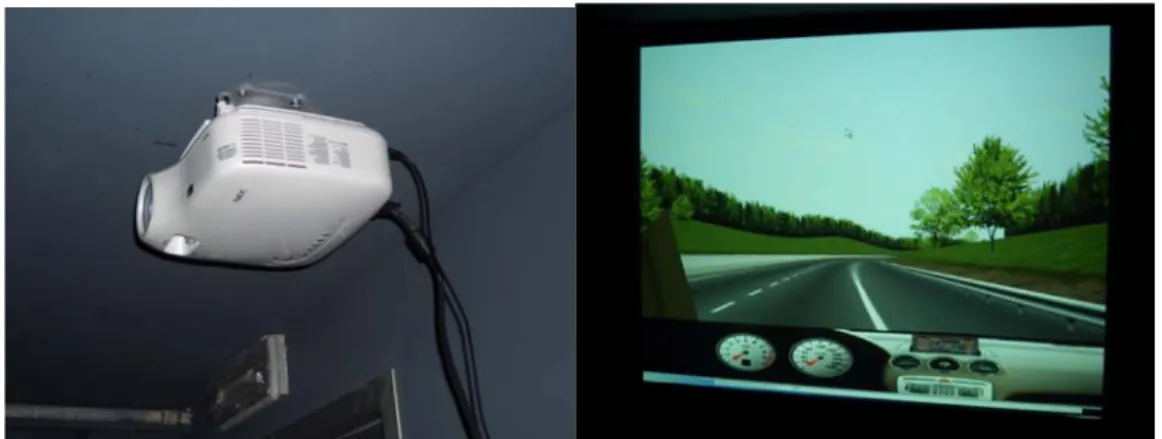
Il sistema di visione è costituito da un canale di proiezione frontale che rappresenta la vista frontale del conducente del veicolo. Un proiettore NEC (Figura 11a) proietta l'immagine elaborata dal Traffic Generator PC su uno schermo piano (Figura 11b).
Il sistema di visione è stato oggetto di una calibrazione attraverso la quale è stato possibile scegliere la corretta distanza del proiettore dallo schermo ed impostare la vista frontale del conducente, in funzione della dimensione dell'immagine e della prospettiva.
Gli sviluppi futuri prevedono l’installazione di uno schermo cilindrico o di tre schermi piani in modo da coprire un angolo di visione pari a 120° e consentire così agli utenti di avere una percezione ancora migliore della velocità e delle situazioni complesse che si verificano soprattutto in ambito urbano (ad esempio in corrispondenza delle intersezioni).
Figura 11: a) Proiettore per la vista frontale – b) Vista frontale del conducente
3.2.8 Scenario grafico
Lo scenario grafico è costituito da un ambiente tridimensionale in cui il veicolo si muove durante la guida simulata.
La ditta specializzata selezionata (Antycip Simulation S.r.l.) ha curato lo sviluppo di uno scenario autostradale al quale è stato aggiunto, nel corso del progetto, uno scenario urbano raccordato da alcune strade di tipo extraurbano.
La parte autostradale è costituita da un anello con tre rami radiali che convergono al centro. Sono presenti tipici svincoli autostradali, del tipo a trombetta, con rampe di raccordo (Figura 12 e Figura 13).
Figura 13: Particolare di svincolo autostradale dello scenario grafico
La parte urbana dello scenario è stata sviluppata sulla base di rilievi fotografici della città di Rosignano Marittimo (LI): in particolare, è stata riprodotta un isolato dell’abitato di Rosignano Solvay, caratterizzato da diversi incroci e rotatorie (Figura 14).
Figura 14: Incrocio nella zona urbana dello scenario grafico.
Per ottenere un buon livello di realismo della simulazione, nell'ambiente riprodotto dallo scenario grafico è presente un traffico autonomo, attualmente composto da 300 veicoli, gestito dai computer dedicati alla grafica (Traffic Generator e Instructor Station).
L'intero scenario può essere modificato inserendo, spostando o eliminando oggetti grafici statici (macchine parcheggiate, cantieri autostradali, ecc.) oppure agendo dall'Instructor Station, durante la simulazione, su variabili quali l'intensità di traffico o le condizioni ambientali (ora del giorno, nebbia e pioggia).
Nell’ultimo periodo è stato inserito il flusso di traffico pedonale in corrispondenza di percorsi opportunamente definiti all’interno dello scenario urbano (Figura 15).
Figura 15: Simulazione attraversamento pedonale
Lo scenario grafico viene eseguito in Vega Prime, un software dedicato realizzato da Multigen-Paradigm.
Il software in questione permette di creare ambienti tridimensionali su misura e permette la gestione del traffico e delle condizioni ambientali (Figura 16).
Tuttavia, alcune informazioni vanno settate quando la simulazione è ferma, vale a dire: - il set-up della vista frontale del conducente (posizione e angoli);
- i parametri di traffico (numero di veicoli, velocità e percorso di gruppi di veicoli - i percorsi pedonali;
- l’inserimento di oggetti statici (ad esempio, vetture parcheggiate, segnaletica, illuminazione ecc.
Con queste funzioni, l’ambiente di simulazione può essere completamente personalizzato per le esigenze dello specifico studio che si va a condurre.
Figura 16: Interfaccia Vega Prime – Struttura ad albero per il setting delle informazioni grafiche
Durante la simulazione, la grafica è in continuo aggiornamento con i segnali calcolati dal modello di simulazione del veicolo e inviati dal Target PC al Traffic Generator.e l’Instructor Station. Questi segnali definiscono la posizione e l’orientamento del veicolo nello scenario e sono rappresentati da:
- coordinata longitudinale del centro di massa del veicolo in un riferimento fisso (X); - coordinare laterale del centro di massa del veicolo in un riferimento fisso (Y); - centro di massa del veicolo in altezza (Z);
- velocità longitudinale del centro di massa del veicolo; - velocità laterale del centro di massa del veicolo; - angolo di imbardata; - angolo di beccheggio; - angolo di rollio; - velocità di imbardata; - velocità di beccheggio; - velocità di rollio;
- simulazione in tempo reale; - n° giri del motore.
Prima di inviare le coordinate X e Y, una traslazione e una rotazione di 90° vengono eseguite nel modello al fine di allineare il sistema di riferimento del modello a quello dello scenario grafico. E’ necessario eseguire un allineamento del vettore tempo per garantire la simulazione in tempo reale, per cui anche il segnale orario viene inviato dal Target PC. La vista anteriore del conducente (Figura 17) si completa con il cruscotto virtuale, che visualizza la velocità del veicolo ed il numero di giri del motore, e con uno specchietto retrovisore.
Figura 17: cruscotto e specchietto retrovisore virtuali
3.2.9 Modello di veicolo
Il modello di veicolo, realizzato in Matlab/Simulink e rappresentato in Figura 18, è il cuore del simulatore di guida. Esso è costituito da tre parti fondamentali:
- elaborazione input del guidatore; - modello di veicolo vero e proprio; - invio dati.
Il settore relativo all'elaborazione degli input del guidatore opera sui segnali di ingresso utilizzando dei blocchi presenti in Simulink dedicati alla comunicazione con la scheda NI per l'acquisizione dei segnali relativi allo sterzo e alle posizioni dei pedali.
Con questi blocchi viene specificato il protocollo di comunicazione e la frequenza di campionamento dei segnali; vengono inoltre eseguite operazioni di conversione dei segnali prima che essi siano inviati agli altri PC.
Il modello di veicolo è stato realizzato con blocchi che modellano, oltre alla dinamica, i vari sottosistemi di un veicolo, così che ciascuno di essi possa essere sviluppato ed eventualmente migliorato indipendentemente in qualunque momento.
Figura 18: Schema a blocchi del modello in Matlab/Simulink. Al centro in azzurro il sistema principale con il modello di veicolo a 14 gradi di libertà.
Tutti i sistemi (blocchi) sono inoltre parametrici permettendo così di modificare facilmente i parametri caratteristici dei vari sottosistemi per simulare la guida con diversi modelli di auto.
Il blocco della dinamica del veicolo è stato creato sulla base di modelli proposti in letteratura, aventi diversi livelli di complessità [4] [5].
Allo stato attuale il modello ha 14 gradi di libertà: 6 sono dati dalla posizione e orientamento della massa sospesa nello spazio, 4 rappresentano la posizione relativa delle masse non sospese rispetto alla cassa, ovvero il moto delle sospensioni e, infine, si hanno 4 gradi di libertà per la velocità angolare delle ruote.
Il modello di pneumatico, che influenza notevolmente la dinamica del veicolo, ha richiesto un'attenzione particolare per ovviare ai problemi che si riscontrano utilizzando i classici modelli presenti in letteratura in applicazioni in cui è richiesta la possibilità di effettuare manovre di arresto e ripartenza (ed eventualmente inversione di marcia), quali si hanno in un simulatore di guida [6].
Facendo riferimento alla Figura 19, rappresentativa del modello di veicolo, si osserva anche la presenza di un blocco relativo al sistema frenante che permette di calcolare la coppia frenante per ogni ruota come funzione della posizione acquisita del pedale del freno.
I blocchi relativi alla trasmissione, insieme al blocco dell'equilibrio dinamico delle ruote, sono invece adibiti al calcolo della coppia motrice alle ruote. Il motore è implementato con ulteriori blocchi che rappresentano le funzioni di coppia e potenza per numero di giri; inoltre, è presente una funzione di freno motore che interviene con valvola a farfalla chiusa. Il Powertrain, oltre al motore, è composto da una frizione centrifuga (impiegata per le partenze da fermo), da un cambio automatico, la cui logica di azionamento è basata al momento esclusivamente sulla velocità di avanzamento, e da un differenziale ordinario. Oltre ai blocchi descritti e rappresentati in figura, è presente una funzione dedicata al calcolo della coppia di feedback sullo sterzo.
In particolare, viene definita la configurazione geometrica completa delle sospensioni anteriori in funzione della loro escursione e dell'angolo di sterzo; in questo modo si ottengono, ad ogni step di simulazione, la posizione nello spazio dell'asse di sterzo e la posizione del centro dell'impronta rispetto al quale vengono valutate le azioni esercitate dal pneumatico. Noti i valori delle forze che lo pneumatico esercita, si ottiene il momento di sterzatura e infine la coppia da applicare al piantone di sterzo per mezzo del motore brushless adibito alla retroazione. Per poter simulare il modello in tempo reale nel Target PC, l'integratore deve essere a passo fisso. L'intervallo di discretizzazione è stato posto pari a 2,5 ms, ovvero corrispondente a una frequenza di 400 Hz, che si è dimostrato sufficiente per risolvere equazioni anche di modelli complessi.
Le prestazioni del modello sono apparse più che soddisfacenti in quanto il tempo di soluzione, di ricezione e invio segnali per ogni step di integrazione (TET: Task Execution Time) è di circa un ordine di grandezza inferiore al tempo massimo determinato dalla frequenza di calcolo e pari a 400 Hz.
L'ultima parte del modello in Simulink riguarda l'invio dati. Con questi blocchi vengono specificati i segnali da inviare agli altri computer e le relative impostazioni.
La frequenza di invio è posta al momento a 100 Hz per i tre computer destinatari.
3.2.10 Acquisizione dati
Durante le simulazioni, l'Host PC è adibito all'acquisizione, al monitoraggio e al salvataggio dei dati relativi agli input del pilota e alle variabili di dinamica del veicolo ricevuti dal Target PC.
A questo scopo è stato realizzato un Data Receiver come modello in Simulink (Figura 20).
Figura 20: Interfaccia acquisitore
Una semplice interfaccia consente all'operatore, che segue la simulazione, di monitorare la guida attraverso i valori di una serie di segnali. Con il data receiver si può inserire il nome e il percorso di salvataggio del file contenente i dati della prova ed inoltre può essere stabilita la frequenza di acquisizione tra tre diversi valori: 25, 50 e 100 Hz.
I risultati di simulazione sono salvati in un'unica matrice di dati nel formato di Matlab (file .mat) e nel classico formato testo (file .txt).
Allo stato attuale vengono registrati 54 segnali.
Il Data Receiver assembla la matrice dei dati con i vari segnali ricevuti e converte il formato dei numeri in modo da avere dimensioni di file molto ridotte. A titolo di esempio, i segnali acquisiti dopo 10 minuti di simulazione occupano poco più di 1MB in formato testo, rendendo possibile un semplice ed immediato passaggio di dati per la successiva fase di analisi.
Di seguito (Figura 20) vengono mostrati due segnali acquisiti durante una manovra di cambio corsia (angolo d sterzo e distanza dalla linea d’asse della corsia):
Figura 20: Segnali di angolo di sterzo e della distanza del veicolo dalla linea media della corsia durante una prova di sbandata.
BIBLIOGRAFIA
1. F. Frendo, A. Malvasi, N. Novi, E. Vitale, Development of an automotive real-time
simulator for preventive safety studies, Proc. of the Mathworks Automotive
Conference, Torino, Italy, 2006.
2. R. Bartolozzi, F. Frendo, E. Vitale, Sviluppo di un simulatore di guida per studi
sulla sicurezza attiva dei veicoli, Atti del XXXVII Convegno Nazionale
dell’Associazione Italiana per l’Analisi delle Sollecitazioni, Roma (Italy), September 10-13, 2008.
3. A. Malvasi, Sviluppo di un simulatore di guida di autoveicolo per studi di sicurezza
preventiva, PhD Thesis, Università di Pisa, 2007.
4. G. Genta, Meccanica dell'autoveicolo, Levrotto Bella, Torino, 1996.
5. M. Guiggiani, Dinamica dell'autoveicolo, Citt_a Studi Edizioni, Torino, 2007. 6. J. E. Bernard e C. L. Clover, Tire modeling for low-speed and high-speed