6.ELABORAZIONE DEI DATI ED INTERPRETAZIONE DEI RISULTATI
6.Elaborazione dei dati ed interpretazione dei risultati
L'analisi effettuata con tecniche D.O.E. di analisi della varianza in ambiente Matlab ci ha consentito di poter stabilire da un punto di vista statistico quali sono i fattori, e le combinazioni dei fattori, che effettivamente determinano una variazione dei parametri scelti come indice della precisione del nostro sistema di ricostruzione tridimensionale, nonché di farci un’idea della relazione tra la variazione dei fattori e quella dei parametri.
Tali risultati sono stati ottenuti analizzando le tabelle forniti dalla funzione Matlab anovan (in grado di eseguire un'anova su un parametro considerando contemporaneamente più fattori) ed i grafici ottenuti elaborando i dati delle tabelle anova mediante la funzione Matlab multcompare.
Per individuare in maniera più immediata alcuni risultati della campagna di prove sperimentali (e per avere anche una conferma dei risultati ottenuti in ambiente Matlab), i dati sono stati elaborati separatamente anche in ambiente Excel e analizzati mediante grafici.
Per non appesantire l’esposizione dei risultati dell’analisi con lunghe espressioni ripetute e per renderne più agevole una rappresentazione grafica si è rivelato opportuno utilizzare diverse diciture sintetiche: quella che seguirà quindi può considerarsi a tutti gli effetti una legenda con cui interpretare le tabelle, i grafici e anche alcune parti scritte.
Fattori: sono i 5 fattori di controllo scelti per la nostra campagna sperimentale (distanza normale, distanza laterale, tipo di obiettivo, tipo di ricostruzione, entità ricostruita), ovvero quelle variabili che abbiamo deciso di modificare per valutarne l’effetto sulla precisione del sistema di ricostruzione.
Parametri: sono i 3 indicatori scelti per valutare la precisione del sistema di ricostruzione (scostamento massimo, deviazione standard, raggio del cilindro).
6.ELABORAZIONE DEI DATI ED INTERPRETAZIONE DEI RISULTATI
Distanza normale: è la distanza tra il proiettore e l’oggetto ricostruito; i tre livelli scelti per questo fattore sono: 600 mm, 1050 mm, 1400 mm; nelle tabelle anova verrà indicato con “DN”.
Distanza laterale: è la distanza tra l’asse ottico del proiettore e il punto di snodo delle telecamere sulla guida lineare tarata che le sostiene; i due livelli scelti per questo fattore sono: 240 mm e 430 mm; nelle tabelle anova verrà indicato con “DL”.
Obiettivo: è il tipo di obiettivo montato sulle telecamere; i due tipi di obiettivo differiscono solo per la lunghezza della focale, pertanto indicheremo i due livelli del fattore proprio mediante questa grandezza: 6 mm e 12 mm; nelle tabelle anova verrà indicato con “OB”.
Ricostruzione: è il tipo di ricostruzione impiegata per ottenere la nuvola di punti; abbiamo tre livelli per questo fattore, ossia sono state utilizzate tre metodologie: la tecnica che prevede l’utilizzo delle due telecamere per la corrispondenza (indicata come “stereo”), quella che utilizza una telecamera e il proiettore calibrato tenendo conto di un modello di distorsione (indicata come “mono con distorsione” o “monoD”) e quella uguale alla precedente ma che non considera nessun modello di distorsione per il proiettore (indicata come “mono senza distorsione” o “monoND”); nelle tabelle anova verrà indicato con “RI”.
Entità: è l’oggetto ricostruito tridimensionalmente; i due livelli di questo fattore sono il piano (rappresentato dallo stesso pannello di calibrazione) e dal cilindro (un cilindro di alluminio di 125 mm di raggio realizzato con elevata precisione dimensionale); nelle tabelle anova verrà indicato con “EN”.
Scostamento massimo: rappresenta l’errore massimo (in mm) tra la nuvola di punti e la superficie di best-fit piana o cilindrica.
6.ELABORAZIONE DEI DATI ED INTERPRETAZIONE DEI RISULTATI
Deviazione standard: rappresenta la deviazione standard (in mm) degli errori tra la nuvola di punti e la superficie di best-fit piana o cilindrica; da notare che si utilizzerà anche il termine “deviazione standard campionaria” per indicare la deviazione standard di qualche grandezza eseguita su una popolazione all’interno del campione.
Raggio (del cilindro): è la misura (fornita dal programma Imageware) del raggio del cilindro di best-fit; in alcuni casi il vero parametro analizzato sarà l’errore sul raggio (ovvero la differenza tra questa misura e il raggio noto del cilindro) in valore assoluto o anche considerando il segno.
Layout: indica la singola configurazione assunta dal sistema di ricostruzione considerato complessivamente: in pratica avendo 2 fattori con 3 livelli e 3 fattori con 2 livelli abbiamo 3 x 3 x 2 x 2 x 2 = 72 possibili combinazioni o layout; ogni tanto si parlerà di layout geometrico-ottici: con questa dizione indicheremo le diverse configurazioni “fisiche” della struttura di acquisizione (che richiedono in pratica una singola procedura di calibrazione); in base al numero dei livelli di questi fattori si ha che si devono eseguire 3 x 2 x 2 = 12 procedure di calibrazione.
6.1 Determinazione dell’influenza dei fattori sui parametri
Per stabilire in modo statistico se un fattore influenza o meno un parametro bisogna interpretare i risultati raccolti nella tabella ottenuta mediante l’utilizzo della funzione Matlab anovan: ogni tabella presentata si riferisce ad un parametro dei tre che sono stati scelti per la nostra analisi; i fattori considerati sono tutti e cinque quelli stabiliti in fase di pianificazione e sono state considerate anche tutte le possibili combinazioni tra di essi.
Ogni riga della tabella si riferisce ad un fattore o ad una combinazione di fattori, riportati in forma sintetica nella prima colonna: si faccia riferimento alla legenda appena riportata per interpretare le sigle.
6.ELABORAZIONE DEI DATI ED INTERPRETAZIONE DEI RISULTATI
Per ottenere le informazioni sulla influenza dei fattori è sufficiente sapere come interpretare i valori riportati nelle ultime due colonne; nella penultima viene riportato il valore corrispondente alla statistica di Fischer [9] (in pratica indica quanto è grande la variabilità imputabile ad un fattore o alla combinazione di fattori rispetto a quella dovuta agli errori): più è grande tale valore e più sarà influente un fattore o la combinazione di fattori corrispondente. Confrontando quindi i valori di questa colonna si può ordinare i fattori in base alla loro influenza sui parametri.
Nell’ultima colonna abbiamo il p-value [9]: se il valore relativo ad un fattore in tale colonna è α allora possiamo dire che tale fattore risulta influente sul parametro con una confidenza dell’ (1- α)%.
Dato che normalmente in questo tipo di analisi si impone un livello di confidenza standard del 95%, noi diremo che un fattore risulta influente sul parametro quando il valore nell’ultima colonna è inferiore a 0.05.
6.1.1 Parametro “scostamento massimo”
Dall'analisi della tabella anova relativa allo scostamento massimo (vedi figura 6.1) si evince che risultano influenti (con un livello di confidenza del 95%) non solo tutti i fattori, ma anche quasi tutte le combinazioni fra i fattori (fino al quinto livello), con le sole eccezioni della combinazione di terzo livello "distanza normale - distanza laterale - entità" e quella di quarto "distanza normale - distanza laterale - entità - tipo di ricostruzione".
Mediante l'analisi della quinta colonna della tabella possiamo dire che i fattori analizzati risultano essere nell'ordine, dal più influente a quello meno: entità ricostruita, tipo di obiettivo, distanza laterale, tipo di ricostruzione e distanza normale; si può anche notare che ben tre combinazioni di secondo livello risultano essere più influenti del fattore singolo "distanza normale".
6.ELABORAZIONE DEI DATI ED INTERPRETAZIONE DEI RISULTATI
figura 6.1 tabella anova relativa al parametro scostamento massimo
L'analisi effettuata separatamente con Excel (vedi figura 6.2) si limita a considerare esclusivamente i singoli fattori e non le combinazioni fra gli stessi; inoltre, per avere ulteriori elementi di analisi, si è preferito evidenziare i contributi delle variazioni dei livelli dei fattori invece che quello dei fattori.
influenza della variazione dei livelli dei fattori sullo scostamento massimo
0.0000 0.1000 0.2000 0.3000 0.4000 0.5000 0.6000 0.7000 0.8000 0.9000 1.0000 600 -1050 monoD -monoND 1050 -1400 600 -1400 240 - 430 stereo -monoD 6 - 12 cilindro -piano stereo -monoND Dist normale Tipo ricostruz Dist normale Dist normale Dist laterale Tipo ricostruz
Obiettivo Entità Tipo ricostruz
mm
6.ELABORAZIONE DEI DATI ED INTERPRETAZIONE DEI RISULTATI
Tenuto presente questo, possiamo confrontare i risultati e ottenere così una conferma delle due analisi effettuate in base all’accordo che esse mostrano.
Ritornando al parametro che stiamo considerando, possiamo vedere che il grafico di Excel conferma l’ordine di influenza ricavato dall’analisi della tabella anova, ma si vede che in realtà la variazione del livello del fattore che determina la maggiore variazione dello scostamento massimo risulta essere quella tra il metodo di ricostruzione stereo e quello mono senza distorsione; poiché però le altre due variazioni di livelli relativi al fattore sono piuttosto contenute, globalmente il fattore “tipo di ricostruzione” risulta essere meno influente di altri.
6.1.2 Parametro “deviazione standard”
6.ELABORAZIONE DEI DATI ED INTERPRETAZIONE DEI RISULTATI
Analizzando l’ultima colonna della tabella anova relativa alla deviazione standard (figura 6.3) si vede come tutti i fattori e tutte le combinazioni fra i fattori (fino al quinto livello) risultano influenti con un livello di confidenza del 95%.
Osservando la quinta colonna nella tabella possiamo ordinare i fattori in base alla loro influenza sulla deviazione standard; abbiamo dunque dal più influente al meno influente: tipo di obiettivo, distanza laterale, entità ricostruita, tipo di ricostruzione, distanza normale.
Questa volta nessuna combinazione di fattori risulta più influente di qualche singolo fattore; la combinazione più influente risulta essere quella di secondo livello "ricostruzione - entità".
influenza della variazione dei livelli dei fattori sulla deviazione standard
0.0000 0.0200 0.0400 0.0600 0.0800 0.1000 0.1200 0.1400 0.1600 600 -1050 monoD -monoND stereo -monoD 1050 -1400 cilindro -piano 240 - 430 600 -1400 6 - 12 stereo -monoND Dist normale Tipo ricostruz Tipo ricostruz Dist normale Entità Dist laterale Dist normale Obiettivo Tipo ricostruz mm
figura 6.4 Ordine di influenza delle variazione dei livelli dei fattori sulla deviazione standard
Anche in questo caso l'analisi effettuata in Excel (figura 6.4) conferma i risultati ottenuti in Matlab; inoltre la variazione di livelli del fattore che determina la maggiore variazione del parametro "deviazione standard" è ancora quella tra il metodo di ricostruzione stereo e quello mono senza distorsione; per lo stesso motivo precedentemente illustrato, però, globalmente il fattore stesso risulta essere meno influente di altri.
Possiamo anche notare come l'ordine di influenza dei fattori (sia globale sia come variazione dei livelli) non si discosti molto tra le analisi effettuate sui due parametri deviazione standard e scostamento massimo.
6.ELABORAZIONE DEI DATI ED INTERPRETAZIONE DEI RISULTATI
6.1.3 Parametro “raggio” (del cilindro)
figura 6.5 tabella anova relativa al parametro raggio
Dai risultati dell'anova relativa al parametro raggio (figura 6.5) si vede che tutti i fattori risultano influenti con un livello di confidenza del 95% (ma sarebbe addirittura superiore al 99.99%: l'ultima colonna infatti presenta tutti 0 perché sono valori troppo piccoli rispetto al numero di decimali visualizzati di default).
Osservando la quinta colonna vediamo che il fattore più influente risulta essere la distanza laterale, seguito dalla distanza normale, del tipo di ricostruzione e dall'obiettivo; stranamente, però, è una combinazione di fattori di secondo livello, ovvero "distanza normale - obiettivo", quella che risulta avere la maggiore influenza sul raggio, e comunque le influenze delle combinazioni di fattori non risultano essere mediamente inferiori a quelle dei singoli fattori.
C’è da precisare, comunque, che risultati relativi ai raggi del cilindro ricostruito risultano avere un andamento meno regolare rispetto agli altri parametri scelti come indice della precisione della metodologia di ricostruzione (deviazione standard e scostamento massimo).
Questo aspetto sarà esposto più dettagliatamente in seguito nella trattazione dell'analisi completa dei dati effettuata con Excel: ad ogni modo il grafico dell'influenza delle variazione dei livelli dei parametri sul raggio concorda con i risultati dell'anova, come è possibile vedere dalla figura 6.6.
6.ELABORAZIONE DEI DATI ED INTERPRETAZIONE DEI RISULTATI
influenza della variazione dei livelli dei fattori sul raggio
0.0000 0.2000 0.4000 0.6000 0.8000 1.0000 1.2000 monoD -monoND 6 - 12 1050 -1400 600 - 1400 stereo -monoD stereo -monoND 240 - 430 600 - 1050 Tipo ricostruz Obiettivo Dist normale Dist normale Tipo ricostruz Tipo ricostruz Dist laterale Dist normale mm
figura 6.6 Ordine di influenza della variazione dei livelli dei fattori sull’errore sul raggio
Confrontando l’ordine di influenza dei fattori per i tre parametri analizzati si nota che il caso del raggio risulta più a sé stante rispetto agli altri due: questo non stupisce in quanto il raggio è un parametro di precisione dimensionale ed è maggiormente influenzato dalla calibrazione; gli altri due parametri dipendono invece più dalla fase successiva della ricostruzione.
Se analizziamo infatti i valori in tabella 6.1 dei parametri ottenuti da due ricostruzioni ottenute dalle stesse immagini ma con parametri di calibrazione diversi (la calibrazione 2 è ottenuta “affinando” la 1 mediante riestrazione dei punti e togliendo alcune immagini) possiamo renderci conto di come ci siano piccole variazioni per lo scostamento massimo e per la deviazione standard, mentre il raggio varia in modo non trascurabile.
Tabella 6.1
Calibraz 1 Calibraz 2 Calibraz 1 Calibraz 2 Calibraz 1 Calibraz 2
Ricostruzione Scost max Scost max Dev Standard Dev Standard Raggio Raggio
stereo 0.896 0.838 0.179 0.178 126.970 126.372
monoD 1.170 1.121 0.256 0.256 128.276 127.012
monoND 1.156 1.127 0.246 0.235 128.030 126.576
6.2 Analisi dell’influenza dei fattori sui parametri
Stabiliti quali siano i fattori influenti mediante le analisi esposte andiamo ora a valutare come questi fattori influenzino i tre parametri di interesse.
6.ELABORAZIONE DEI DATI ED INTERPRETAZIONE DEI RISULTATI
A partire dalla tabella in cui sono riportati i tre parametri di interesse per ogni nuvola ottenuta nella campagna sperimentale, sono state calcolate le medie campionarie e le deviazioni standard campionarie dei tre parametri per ogni layout (in pratica le medie e le deviazioni standard all'interno delle sette ripetizioni eseguite per ogni layout).
Queste medie campionarie vengono assunte come il valore dei parametri stessi del layout: analizzando globalmente tali medie campionarie si è cercato di capire quali possibili legami e relazioni ci fossero tra i fattori di controllo e i parametri scelti nella nostra indagine, nonché di evidenziare possibili anomalie.
Per i tre parametri di ogni layout è stato fatto poi il rapporto tra la deviazione standard campionaria e la media: questo ha consentito di avere un'idea della variabilità dei risultati relativa ad ogni layout.
Laddove si è notato un valore di tale rapporto superiore agli altri relativamente allo scostamento massimo, sono state riaperte le corrispondenti nuvole per controllare se si fossero dimenticati punti outlier7 in fase di pulizia.
Dall’analisi di tali rapporti si vede che per quanto riguarda gli scostamenti massimi solo in 6 casi su 72 la deviazione standard campionaria risulta essere maggiore del 15% dello scostamento massimo e comunque è sempre inferiore al 20%; anche per le deviazioni standard si evidenzia una buona ripetibilità con solo 10 dei 72 casi superiori al 10% dei quali uno solo superiore al 20%.
Per quanto riguarda i raggi ci troviamo di fronte a valori di questi rapporti ancora più bassi: in tutti e 36 i casi si hanno valori inferiori all'1%, ed addirittura in due soli casi si supera lo 0.1%.
Questi valori mostrano come la variabilità dei dati elaborati non imputabile direttamente ai fattori sia molto contenuta, confermando i risultati già ottenuti mediante le tabelle anova.
Riportiamo ora i risultati dell'analisi condotta in ambiente Excel (con l’ausilio di qualche grafico Matlab) considerando ad uno ad uno i vari parametri di controllo, prima a livello globale e poi nel dettaglio dei confronti tra layout corrispondenti e vediamo cosa si può dire riguardo alla loro influenza sui tre parametri analizzati.
6.ELABORAZIONE DEI DATI ED INTERPRETAZIONE DEI RISULTATI
6.2.1 Fattore “entità ricostruita”
Si è visto dall'analisi della tabella anova che tale fattore risulta essere il più influente relativamente allo scostamento massimo, mentre era il terzo su 5 relativamente alla deviazione standard.
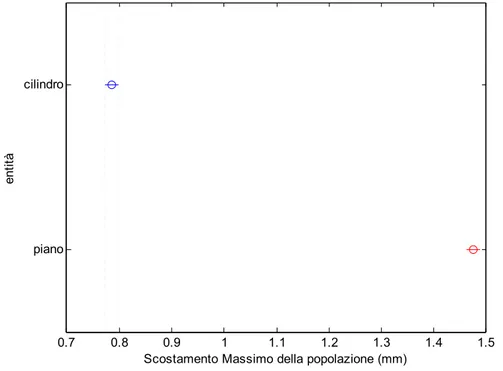
Uno degli strumenti di analisi della varianza del toolbox di statistica in ambiente Matlab è la funzione multcompare: se applichiamo tale funzione in base al fattore “entità” sui dati ottenuti dalle anovan relative ai parametri considerati otteniamo dei grafici in cui troviamo la medie campionarie dei parametri stessi per le popolazioni divise in base al livello del fattore su cui viene eseguito il multcompare, con un'indicazione sulla variabilità statistica dei dati.
Questi grafici vanno letti nella maniera seguente: i cerchietti rappresentano le medie della popolazione cilindro e del piano (relative al parametro considerato); i segmenti che passano attraverso il cerchietto rappresentano l'intervallo di confidenza al 95% di tali medie.
0.7 0.8 0.9 1 1.1 1.2 1.3 1.4 1.5 piano
cilindro
Scostamento Massimo della popolazione (mm)
ent
ità
6.ELABORAZIONE DEI DATI ED INTERPRETAZIONE DEI RISULTATI
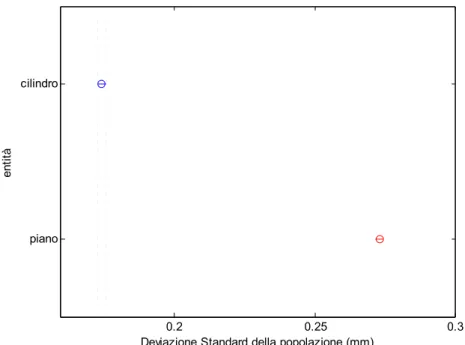
0.2 0.25 0.3
piano cilindro
Deviazione Standard della popolazione (mm)
en
tit
à
figura 6.8 Confronto tra le popolazioni cilindro e piano in base alla deviazione standard
Questi grafici sono stati calcolati per tutti i fattori analizzati, per i parametri scostamento massimo e deviazione standard (per il raggio si sono riportati altri grafici ritenuti più utili); non si osserverà nessun caso in cui questi intervalli di confidenza relativi ai fattori si sovrappongono: ciò equivale a dire che i fattori stessi sono influenti con una confidenza del 95%, come era già stato visto direttamente dall’analisi delle tabelle anova.
Tutti questi grafici forniti dalla funzione multcompare mostrano intervalli di confidenza al 95% sempre piuttosto ristretti:questo significa che l'incertezza sulle medie delle varie popolazioni è molto bassa.
Questo risultato è anche frutto del fatto di avere incluso tutti i fattori in gioco contemporaneamente nell’analisi variazionale (anovan): in tal modo le variazioni dei parametri imputabili ai fattori possono essere determinate e non vanno ad incrementare questa incertezza.
Confrontando la media della "popolazione cilindro" e quella corrispondente per quanto riguarda il piano vediamo come i risultati migliori per entrambi i parametri siano ottenuti dal cilindro.
6.ELABORAZIONE DEI DATI ED INTERPRETAZIONE DEI RISULTATI
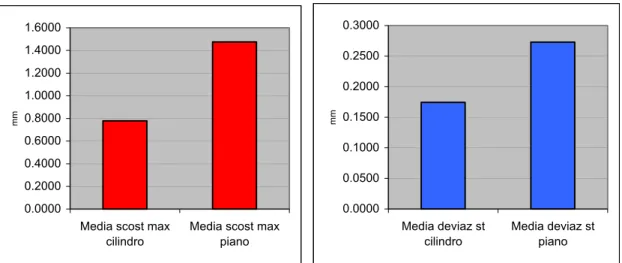
Per avere una conferma di non aver commesso errori nel trattare una mole così grande di dati sono state calcolate le stesse medie campionarie, partendo dai dati ottenuti nella fase di analisi delle nuvole, separatamente in ambiente Excel: sono stati fatti dei grafici corrispondenti a quelli del multcompare e per tutti è stato controllato che i risultati fossero identici (in figura 6.9 si riporta un esempio di questi grafici per il caso appena trattato, tralasceremo invece di riportare gli altri).
0.0000 0.2000 0.4000 0.6000 0.8000 1.0000 1.2000 1.4000 1.6000
Media scost max cilindro
Media scost max piano mm 0.0000 0.0500 0.1000 0.1500 0.2000 0.2500 0.3000 Media deviaz st cilindro Media deviaz st piano mm
figura 6.9 Confronto tra le popolazioni cilindro e piano in base ottenuto separatamente in Excel
Per ricavare ulteriori informazioni utili sull’influenza del fattore “entità ricostruita” analizziamo ora un grafico (figura 6.10) che confronta in dettaglio le medie campionarie degli scostamenti massimi di ogni layout in base al fattore entità.
L'analisi di questo grafico permette di avere un'idea più precisa riguardo all'influenza del fattore stesso (entità) sul parametro di interesse (scostamento massimo) in quanto consente di confrontare direttamente fra loro le coppie di layout che differiscono esclusivamente per quel fattore; essendo poi indicata la composizione dei layout in termini di livelli dei fattori di controllo, è possibile anche notare eventuali andamenti del parametro "scostamento massimo" dipendenti dagli altri fattori, ma per un'analisi più comoda si è preferito riportare ed analizzare di volta in volta un grafico per ogni fattore.
6.ELABORAZIONE DEI DATI ED INTERPRETAZIONE DEI RISULTATI
Questa analisi dettagliata è stata fatta per tutti e tre i parametri scelti come indice della precisione del nostro sistema di ricostruzione, e per tutti e 5 i fattori di controllo.
figura 6.10 Confronto dettagliato degli scostamenti massimi dei layout in base all’entità ricostruita
6.ELABORAZIONE DEI DATI ED INTERPRETAZIONE DEI RISULTATI
Dall'analisi dettagliata del fattore "entità" (vedi figura 6.10 e figura 6.11) si evince che le medie campionarie degli scostamenti massimi risultano sempre inferiori, a parte due soli casi, per il caso del cilindro che risulta pure il livello del fattore più favorevole per la deviazione standard (anche qui tranne due sole eccezioni, peraltro di valore piuttosto limitato).
Possiamo dire quindi che il comportamento globalmente migliore della "popolazione cilindro" rispetto a quella del piano, precedentemente visto dalle analisi non dettagliate, è il risultato di una notevole regolarità “layout per layout” e mostra inoltre un grande accordo tra i due parametri (scostamento massimo e deviazione standard).
I risultati dell’analisi sul fattore “entità ricostruita” danno quindi una chiara indicazione sull’influenza dello stesso sui due parametri di interesse; riguardo a tale influenza non si aveva un’idea precisa in fase di previsione anche se sembrava più problematica la ricostruzione di superfici curve rispetto a quelle piane.
Ad ogni modo il confronto relativo a questo fattore non è ai fini pratici così importante dato che non è una variabile che possiamo controllare: le superfici da ricostruire dipenderanno infatti dall’oggetto che si vuole acquisire.
6.2.2 Fattore “tipo di obiettivo”
Si è visto che il tipo di obiettivo risulta essere un fattore abbastanza influente per quanto riguarda lo scostamento massimo e la deviazione standard (il secondo su 5 in entrambi i casi); riguardo al raggio risulta invece il meno influente di tutti.
L'analisi effettuata mediante multcompare sulle popolazioni "obiettivo da 6 mm" e "obiettivo da 12 mm" (figure 6.12 e 6.13) mostra un comportamento globalmente migliore per l'obiettivo da 12 mm: tale risultato è in linea con le previsioni che si basavano sulla valutazione positiva della maggiore grandezza che risultano avere le immagini (di calibrazione e di acquisizione) per l’obiettivo da 12 rispetto a quello da 6 mm.
6.ELABORAZIONE DEI DATI ED INTERPRETAZIONE DEI RISULTATI
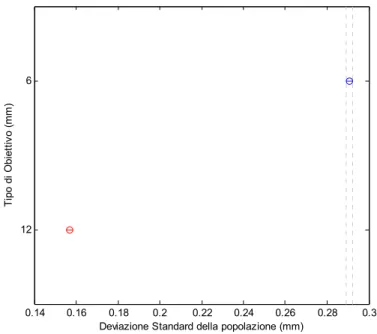
Nel caso del parametro “errore medio sul raggio”, invece di presentare il grafico del multcompare come si è fatto per gli altri due parametri, è utile piuttosto analizzare un altro grafico, ottenuto ancora in ambiente Matlab: tale grafico, chiamato “box-plot”, è il prodotto di un'anova ad una via eseguita su tutto il campione analizzato considerando esclusivamente il fattore "tipo di obiettivo" per il parametro “errore sul raggio” (vedi figura 6.14).
0.7 0.8 0.9 1 1.1 1.2 1.3 1.4 1.5
12 6
Scostamento Massimo della popolazione (mm)
T ip o d i O bi etti vo ( m m )
figura 6.12 Confronto tra le popolazioni obiettivo da 12 e obiettivo da 6 in base allo scostamento massimo
0.14 0.16 0.18 0.2 0.22 0.24 0.26 0.28 0.3 12
6
Deviazione Standard della popolazione (mm)
T ipo di O bi et tiv o (m m )
6.ELABORAZIONE DEI DATI ED INTERPRETAZIONE DEI RISULTATI 6 12 -4 -3 -2 -1 0 1 2 3
Parametro Errore sul Raggio - Fattore Obiettivo
E rro re s ul R ag gi o (m m ) Obiettivo (mm)
figura 6.14 Box-Plot dell’anova ad una via relativa all’errore sul raggio e in base al fattore obiettivo
Questo grafico verrà riportato anche per tutti gli altri fattori e ci consentirà di effettuare ulteriori considerazioni dato che i risultati relativi al parametro “raggio” sono risultati di più difficile interpretazione data la loro minore regolarità rispetto agli altri due; nel box plot si trattano gli errori sul raggio con il loro segno in modo da evidenziare la varianza delle popolazioni.
Il box-plot va letto nel seguente modo: le linee più basse e più alte del "box" sono il 25° e 75° percentile del campione; la linea a metà del box è la mediana del campione; i segmenti orizzontali all'esterno del box sono i limiti inferiore e superiore del campione; le crocette sono gli outlier (per default sono ritenuti tali i campioni distanti dalle estremità del box più di 1.5 volte l'interquantile del campione).
La figura 6.14 mette in evidenza come la popolazione "obiettivo da 12 mm" sia più centrata sullo 0 e presenti molti meno outlier rispetto a quella dell’obiettivo da 6 mm: in definitiva la distribuzione dell’errore appare migliore.
6.ELABORAZIONE DEI DATI ED INTERPRETAZIONE DEI RISULTATI
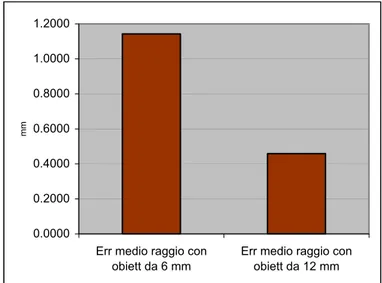
Ad ogni modo per poter confrontare in modo immediato i due livelli di questo fattore relativamente al parametro errore sul raggio (globalmente, ossia in termini di medie campionarie delle popolazioni “obiettivo da 12 mm” e “obiettivo da 6 mm”) riportiamo un grafico Excel con l’errore medio campionario sul raggio delle due popolazioni (qui, a differenza del box-plot, si parla di errore sul raggio in termini di valore assoluto, dato che ci interessa mostrare di quanto è “sbagliato” in media il valore del raggio associato ad una certa popolazione).
0.0000 0.2000 0.4000 0.6000 0.8000 1.0000 1.2000
Err medio raggio con obiett da 6 mm
Err medio raggio con obiett da 12 mm
mm
figura 6.15 Confronto tra le popolazioni obiettivo da 12 e obiettivo da 6 in base all’errore medio sul raggio
Il comportamento migliore della popolazione “obiettivo da 12 mm” è stato riscontrato per tutti e tre i parametri scelti come indice delle performance del sistema di ricostruzione (vedi figure 6.12, 6.13, 6.14 e 6.15).
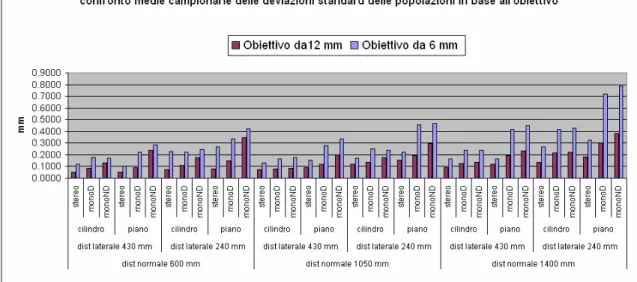
Il comportamento globalmente migliore dell'obiettivo da 12 mm si conferma anche nel dettaglio dei confronti tra i singoli layout con molta regolarità (figure 6.16, 6.17 e 6.18): riguardo allo scostamento massimo solo in un caso su 36 si ha un comportamento peggiore per il tipo da 12 mm, mentre non ci sono eccezioni riguardo alle deviazioni standard; anche l'errore sul raggio mostra un comportamento quasi sempre migliore per il caso dell'obiettivo da 12 mm, e si vede molto chiaramente come gli errori "fuori norma" si abbiano praticamente solo per l'obiettivo da 6 mm.
6.ELABORAZIONE DEI DATI ED INTERPRETAZIONE DEI RISULTATI
figura 6.16 Confronto dettagliato degli scostamenti massimi dei layout in base al tipo di obiettivo
6.ELABORAZIONE DEI DATI ED INTERPRETAZIONE DEI RISULTATI
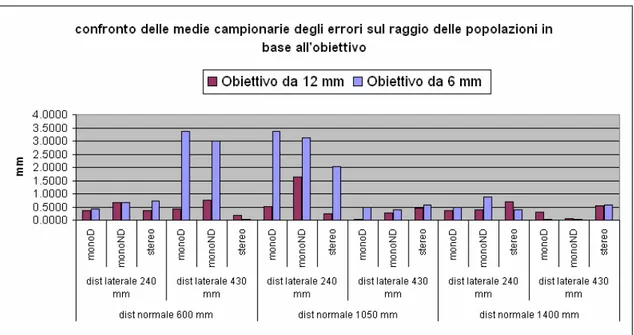
figura 6.18 Confronto dettagliato degli errori medi sul raggio dei layout in base al tipo di obiettivo
Dai risultati ottenuti dall'analisi globale e da quella dettagliata possiamo quindi affermare che l'obiettivo da 12 mm ha dato risultati regolarmente migliori per tutti e tre parametri scelti come indice della precisione del nostro sistema di ricostruzione.
6.2.3 Fattore “distanza laterale”
Abbiamo visto che la distanza laterale risulta essere il terzo parametro più influente relativamente agli scostamenti massimi, il secondo per le deviazioni standard e il primo per quanto riguarda il valore del raggio.
Con analoghe considerazioni rispetto a quelle fatte prima, dai grafici Matlab ed Excel notiamo un comportamento globalmente migliore su tutti e tre i parametri allorché la distanza laterale risulta maggiore (figure 6.19, 6.20, 6.21).
Il box-plot (vedi figura 6.21) ci mostra come, a parte gli outlier, l'estensione globale della popolazione "distanza laterale 430 mm" risulti molto minore e più centrata sullo 0: questo vuol dire che adottare distanze laterali maggiori permette di avere una maggiore ripetibilità e affidabilità dei risultati in termini di raggio.
6.ELABORAZIONE DEI DATI ED INTERPRETAZIONE DEI RISULTATI
0.8 0.9 1 1.1 1.2 1.3 1.4 1.5
430 240
Scostamento Massimo della popolazione (mm)
D is tan za Lat er al e ( m m )
figura 6.19 Confronto tra le popolazioni distanza laterale 240 mm e 430 mm in base allo scostamento massimo
0.2 0.25 0.3
430 240
Deviazione Standard della popolazione (mm)
D is tanz a Lat er al e (m m )
figura 6.20 Confronto tra le popolazioni distanza laterale 240 mm e 430 mm in base alla deviazione standard
0.0000 0.2000 0.4000 0.6000 0.8000 1.0000 1.2000 Err medio raggio a dist lat
240 mm
Err medio raggio a dist lat
430 mm mm 240 430 -4 -3 -2 -1 0 1 2 3
Parametro Errore sul Raggio - Fattore Distanza Laterale
E rr ore s ul Raggi o ( m m ) Distanza Laterale (mm)
6.ELABORAZIONE DEI DATI ED INTERPRETAZIONE DEI RISULTATI
A questo punto precisiamo che quando si parla di outlier riferendoci ai box plot ci si riferisce ai valori dei parametri delle singole ripetizioni (ricordiamo che per ogni layout del nostro piano degli esperimenti abbiamo fatto sette ripetizioni); nelle analisi dettagliate gli outlier sono invece i valori dei parametri assunti per i layout stessi (le medie campionarie all’interno del layout).
L'analisi dettagliata (vedi figure 6.22, 6.23 e 6.24) evidenzia anche per questo fattore una grande regolarità nel confronto tra layout corrispondenti e un sostanziale accordo fra i tre parametri.
Si nota infatti un comportamento migliore per il valore 430 mm senza eccezioni per la deviazione standard, con una sola eccezione per lo scostamento massimo e con poche eccezioni per l'errore sul raggio (i due evidenti outlier, come verrà esposto in alcune considerazioni finali di questo capitolo, dovrebbero dipendere principalmente dalla calibrazione non soddisfacente del proiettore per il relativo layout geometrico-fisico).
figura 6.22 Confronto dettagliato degli scostamenti massimi dei layout in base alla distanza laterale
Il comportamento migliore per valori della distanza laterale maggiori era comunque previsto: da semplici considerazioni geometriche si può capire infatti
6.ELABORAZIONE DEI DATI ED INTERPRETAZIONE DEI RISULTATI
che diminuendo l’angolo tra i due elementi che formano il sistema stereo diminuisce la precisione di ricostruzione.
figura 6.23 Confronto dettagliato delle deviazioni standard dei layout in base alla distanza laterale
6.ELABORAZIONE DEI DATI ED INTERPRETAZIONE DEI RISULTATI
Consideriamo un semplice schema bidimensionale (figura 6.25): supponendo di avere un’incertezza costante (un pixel) sulle immagini di un punto nei due piani retina, si vede come la zona di incertezza risulti più ampia, nel senso della profondità, per angoli minori, per i quali aumenta quindi l’incertezza media su z che è proprio la coordinata che bisogna ricavare per poter ricostruire tridimensionalmente l’oggetto.
c
figura 6.25 Confronto tra le zone di incertezza sulla ricostruzione di un punto con angoli diversi
Nella pratica l’angolo tra telecamere e proiettore è limitato dal fatto che aumentando tale angolo i rilievi presenti sull’oggetto da ricostruire determinano
6.ELABORAZIONE DEI DATI ED INTERPRETAZIONE DEI RISULTATI
nelle immagini zone d’ombra sempre più grandi: per tali zone non si riesce quindi ad avere una ricostruzione perché non si riesce ad attribuire ai punti un codice binario).
Si capisce quindi come sia il caso di adattare la configurazione geometrica del sistema di ricostruzione in base all’oggetto che si deve ricostruire (oggetto liscio o con evidenti rilievi) e in base allo scopo principale della ricostruzione (fornire alcune misure o ricreare in modo dettagliato una forma).
6.2.4 Fattore “tipo di ricostruzione”
Dall’analisi variazionale effettuata in Matlab il tipo di ricostruzione non risulta essere tra i fattori più influenti: per tutti e tre i parametri analizzati risulta infatti al penultimo posto nell'ordine di influenza dei fattori; abbiamo visto però come questo dato vada interpretato alla luce del fatto che in realtà la variazione di livello (all'interno del fattore) tra caso stereo e gli altri due sia comunque una delle variazioni di livello più influenti, ma la scarsa rilevanza della variazione di livello tra caso mono con distorsione e mono senza distorsione fa essere il fattore globalmente non tra i più influenti.
0.6 0.7 0.8 0.9 1 1.1 1.2 1.3 1.4 1.5 1.6 MonoND
MonoD Stereo
Scostamento Massimo della popolazione (mm)
T ipo di R ic os tr uz ione
6.ELABORAZIONE DEI DATI ED INTERPRETAZIONE DEI RISULTATI
0.14 0.16 0.18 0.2 0.22 0.24 0.26 0.28 0.3 0.32 MonoND
MonoD Stereo
Deviazione Standard della popolazione (mm)
T ip o d i R ico st ru zi on e
figura 6.27 Confronto tra le popolazioni “tipo di ricostruzione” in base alle deviazioni standard
0.0000 0.2000 0.4000 0.6000 0.8000 1.0000 1.2000 Err medio raggio con ricostr monoD Err medio raggio con ricostr monoND Err medio raggio con ricostr stereo mm
figura 6.28 Confronto tra le popolazioni “tipo di ricostruzione” in base agli errori sul raggio
Come possiamo vedere dai grafici (figure 6.26, 6,27 e 6.28) globalmente il comportamento risulta migliore (in tutti e tre parametri) per il tipo di ricostruzione stereo, seguito da quello mono che tiene conto della distorsione del proiettore e da quello mono che non ne tiene conto; il box plot sarà analizzato in seguito.
Per quanto riguarda l'analisi dettagliata (figure 6.29, 6.30 e 6.31) tale andamento si conferma con grande regolarità anche nei singoli confronti tra i layout per i parametri scostamento massimo e deviazione standard (in totale abbiamo tre sole eccezioni per la deviazione standard, inoltre sono di entità
6.ELABORAZIONE DEI DATI ED INTERPRETAZIONE DEI RISULTATI
molto limitata); per l'errore sul raggio vediamo invece che, sebbene a livello globale ci sia accordo con gli altri due parametri, nel dettaglio non si ha una grande regolarità nei confronti tra i layout.
figura 6.29 Confronto dettagliato degli scostamenti massimi dei layout in base al tipo di ricostruzione
6.ELABORAZIONE DEI DATI ED INTERPRETAZIONE DEI RISULTATI
figura 6.31 Confronto dettagliato degli errori sul raggio dei layout in base al tipo di ricostruzione
Addirittura abbiamo ben 6 casi sui 18 totali in cui si ha l'errore medio sul raggio più elevato proprio per la ricostruzione stereo: dato che la precisione sulla dimensione è una delle caratteristiche fondamentali che devono avere tutti sistemi di misura, questo dato potrebbe insinuare dei dubbi sulla scelta di utilizzare il sistema stereo piuttosto che quello mono (con distorsione).
Infatti il comportamento regolarmente migliore che ha relativamente agli altri due parametri indica semplicemente che il sistema di ricostruzione stereo permette di ottenere nuvole con meno rumore, e questo potrebbe non interessare poi così tanto.
Anche se il comportamento globale risulta comunque migliore per il caso stereo, sarebbe quindi auspicabile una maggiore regolarità di questo andamento anche nel dettaglio.
A questo punto è utile considerare alcune indicazioni che possono scaturire dall'analisi del box-plot (figura 6.32): come abbiamo detto in precedenza, esso considera gli errori sul raggio di ogni campione con il segno e quindi si può avere un’idea più precisa della distribuzione delle popolazioni relative ai tre tipi di ricostruzione analizzati.
6.ELABORAZIONE DEI DATI ED INTERPRETAZIONE DEI RISULTATI
Stereo MonoD MonoND
-4 -3 -2 -1 0 1 2 3
Parametro Errore sul Raggio - Fattore Tipo di Ricostruzione
E rr or e s ul R aggi o ( m m ) Tipo di Ricostruzione
figura 6.32 Box-Plot dell’anova ad una via relativa all’errore sul raggio e in base al fattore tipo di ricostruzione
Si può vedere come le mediane delle popolazioni delle ricostruzioni mono risultino entrambe più vicine allo 0 di quella della ricostruzione stereo; questo dato sembrerebbe smentire i risultati dell’analisi globale sul fattore ottenuta precedentemente: in realtà ciò è dovuto al fatto che gli errori sul raggio della popolazione “stereo” sono praticamente tutti positivi mentre nelle altre due popolazioni si hanno risultati sia positivi che negativi che mediamente si annullano.
Il box-plot ci consente quindi di avere le idee chiare sull'influenza che ha il tipo di ricostruzione: in realtà si vede come la variabilità della popolazione stereo risulta molto più contenuta di quella delle altre due popolazioni, la cui notevole variabilità fa sì che i metodi di ricostruzione mono risultino meno affidabili anche dal punto di vista della precisione sulle dimensioni.
Concludendo possiamo quindi affermare che il tipo di ricostruzione migliore è quella stereo, anche se presenta un leggero problema di "scala" (nel senso che fornisce valori del raggio tendenzialmente superiori alla realtà), cosa che è stata confermata da colloqui avuti con dottorandi della nostra università; presumibilmente la fase in cui tale problema scaturisce dovrebbe essere quella
6.ELABORAZIONE DEI DATI ED INTERPRETAZIONE DEI RISULTATI
in cui avviene la calibrazione del sistema stereo a partire dai risultati delle calibrazioni singole delle telecamere.
Dal confronto tra ricostruzione mono che tiene conto della distorsione del proiettore e quella che non ne tiene conto emerge inoltre un'importante indicazione statistica sulla bontà del lavoro svolto in precedenza in questa università riguardo alla definizione di un modello di distorsione del proiettore e alla sua implementazione nella calibrazione del sistema.
6.2.5 Fattore “distanza normale”
Si è visto in precedenza che la distanza normale risulta essere un fattore abbastanza influente solo nel caso della misura del raggio; per gli altri due parametri risulta infatti il fattore meno influente dei cinque.
Rispetto agli altri fattori, inoltre, la distanza normale è quello che è risultato di più difficile lettura ed interpretazione ed ha parzialmente smentito le previsioni: si prevedeva infatti che aumentando la distanza normale ci fosse un evidente peggioramento della precisione della ricostruzione a causa delle minori dimensioni che risultano avere, nelle relative immagini, sia il pannello di calibrazione sia l’oggetto da ricostruire.
Quello che si può vedere dall'analisi relativa alla distanza normale è che le previsioni sono state confermate globalmente per i parametri scostamento massimo e deviazione standard, mentre per l'errore sul raggio si osserva sorprendentemente che le performance migliori si hanno nel caso della distanza normale maggiore (vedi figure 6.33, 6.34, 6.35).
Anche dall'analisi del box-plot (figura 6.35) si evince che la popolazione che presenta i migliori risultati in termini di errore sul raggio è quella con distanza normale di 1400 mm.
6.ELABORAZIONE DEI DATI ED INTERPRETAZIONE DEI RISULTATI
0.9 0.95 1 1.05 1.1 1.15 1.2 1.25 1.3 1.35 1.4
1400 1050 600
Scostamento Massimo della popolazione (mm)
D is tanz a Nor m al e (m m )
figura 6.33 Confronto tra le popolazioni distanza normale 600, 1050 e 1400 mm in base allo scostamento massimo
0.18 0.2 0.22 0.24 0.26 0.28 0.3
1400 1050 600
Deviazione Standard della popolazione (mm)
D is tanz a Nor m al e (m m )
figura 6.34 Confronto tra le popolazioni distanza normale 600, 1050 e 1400 mm in base alla deviazione standard
0.0000 0.2000 0.4000 0.6000 0.8000 1.0000 1.2000 Err medio raggio a dist norm 600 mm Err medio raggio a dist norm 1050 mm Err medio raggio a dist norm 1400 mm mm 600 1050 1400 -4 -3 -2 -1 0 1 2 3
Parametro Errore sul Raggio - Fattore Distanza Normale
E rr ori s ul R aggi o ( m m ) Distanza Normale (mm)
6.ELABORAZIONE DEI DATI ED INTERPRETAZIONE DEI RISULTATI
Ad ogni modo l'analisi dettagliata mostra come anche per i due parametri per cui i risultati confortano le previsioni non si abbia una buona regolarità nei confronti tra i singoli layout come per gli altri fattori, anche se si vede che aumentando la distanza normale la ricostruzione di un oggetto tendenzialmente fornisce nuvole con più rumore (oltre che con meno risoluzione dato che viene trattato un numero minore di pixel a parità di superficie dell’oggetto).
figura 6.36 Confronto dettagliato degli scostamenti massimi dei layout in base alla distanza normale
6.ELABORAZIONE DEI DATI ED INTERPRETAZIONE DEI RISULTATI
figura 6.38 Confronto dettagliato degli errori sul raggio dei layout in base alla distanza normale
Nel grafico dettagliato dell'errore sul raggio è invece difficile notare una tendenza particolare analizzando i confronti tra i layout corrispondenti; ad ogni modo è degno di nota il fatto che nel caso della distanza normale maggiore (1400 mm) non si sono avuti outlier (come si è visto anche nel box-plot).
Relativamente all’aspetto dell’esattezza della misura, in base a questi risultati non possiamo quindi confermare l’idea che si aveva in fase di previsione per cui per ottenere la maggior precisione fosse necessario adottare il limite inferiore della distanza normale: tale limite dipende dalle specifiche del proiettore (deve mettere a fuoco a quella distanza) e dalle dimensioni dell'oggetto unitamente all'ottica delle telecamere (l'oggetto deve comunque risultare incluso interamente nelle immagini, a meno che si voglia ricostruirne solo una parte).
Il fatto che comunque gli altri due parametri mostrino un andamento più regolare e in linea con le previsioni sembra suggerire che i motivi di questo andamento anomalo relativo al parametro “raggio” sia da imputare essenzialmente a problematiche riguardanti più che altro la fase di calibrazione.
6.ELABORAZIONE DEI DATI ED INTERPRETAZIONE DEI RISULTATI 6.3 Riepilogo e considerazioni sui risultati
6.3.1 Fattore “entità ricostruita”
Il confronto fra le popolazioni “cilindro” e “piano” ha visto ottenere precisioni migliori per il cilindro, oltretutto con grande regolarità nel dettaglio dei i singoli layout.
In fase di previsione ci si aspettava un responso diverso: crediamo comunque che abbia influenzato pesantemente i risultati il fatto che come piano è stato acquisito lo stesso pannello di calibrazione, che non era di colore uniforme né opaco come il cilindro, inoltre i pixel interessati non erano gli stessi.
Ricordiamo comunque che questo confronto non è particolarmente significativo: l’entità ricostruita infatti non è un parametro controllabile.
6.3.2 Fattore “obiettivo”
L’analisi di questo fattore ha dato risultati di notevole regolarità e accordo fra i tre parametri: possiamo dire quindi con buona sicurezza che l’obiettivo migliore risulta essere quello da 12 mm.
In questo caso le previsione sono state confermate: si valutava infatti che il maggiore ingrandimento che questo obiettivo consente fosse una cosa sicuramente positiva per la precisione.
Dal grafico dettagliato relativo al parametro raggio (figura 6.18) si nota inoltre che gli outlier si hanno solo per l’obiettivo da 6 mm; questi valori elevati dell’errore sul raggio sembrano comunque essere dovuti a calibrazioni insoddisfacenti, come documenteremo qui di seguito.
Per il caso delle ricostruzioni mono con distanza normale 600 mm, distanza laterale 430 mm e obiettivo da 6 mm la calibrazione del proiettore, nonostante diversi tentativi iterativi di "affinamento", non aveva raggiunto un livello soddisfacente, così come si poteva notare dall'analisi degli errori del toolbox di calibrazione del proiettore (vedi figura 6.39).
6.ELABORAZIONE DEI DATI ED INTERPRETAZIONE DEI RISULTATI
figura 6.39 Visualizzazione degli errori di riproiezione nella calibrazione del proiettore
Andando ad esaminare le riproiezioni dei punti della scacchiera proiettata sulle immagini di calibrazione del proiettore si è notato infatti che il processo di estrazione dei punti è avvenuto con frequenti errori probabilmente favoriti dalla presenza dei quadrati grigi della scacchiera stampata del provino, come si può vedere in figura 6.40 (le crocette rosse dovrebbero trovarsi ai vertici dei quadrati neri).
Queste difficoltà di estrazione probabilmente dipendono dallo scarso contrasto che mostrano le immagini di calibrazione del proiettore, favorito dal fatto che a bassi valori di distanza normale bisogna chiudere molto i diaframmi delle telecamere per non avere saturazione nelle immagini (da tener presente che nelle immagini di calibrazione del proiettore l’estrazione è complicata dalla presenza di quadrati bianchi e grigi della scacchiera stampata e di quelli neri della scacchiera proiettata, ovvero tre livelli di grigio invece che due come nella calibrazione delle camere).
Questo effetto non si è verificato nel corrispondente layout geometrico con gli obiettivi da 12 mm: in questo caso il processo di estrazione dei punti
6.ELABORAZIONE DEI DATI ED INTERPRETAZIONE DEI RISULTATI
coinvolge una regione rettangolare con le stesse dimensioni in pixel, ma i quadrati della scacchiera nelle immagini di calibrazione in questo caso risultano più grandi; questo probabilmente consente alla procedura di estrazione dei punti di lavorare bene (vedi figura 6.41).
figura 6.40 Estrazione dei punti insoddisfacente (obiettivo da 6 mm)
6.ELABORAZIONE DEI DATI ED INTERPRETAZIONE DEI RISULTATI
Ad ogni modo si è notato che gli obiettivi da 6 mm tendono a lavorare male a distanze ravvicinate: tale considerazione verrà sviluppata in seguito nel paragrafo relativo alla distanza normale.
Anche gli altri valori fuori norma dell'errore sul raggio che si notano nel grafico dettagliato (per distanza normale 1050 mm, distanza laterale 240 mm e obiettivo da 6 mm) dipendono da problemi di calibrazione e possiamo averne una conferma dalla figura 6.42 che presenta i valori dell’angolo fra le telecamere così come è stato calcolato dalla procedura di calibrazione stereo.
Valore dell'angolo tra le telecamere ricavato dalla calibrazione stereo
0.0 10.0 20.0 30.0 40.0 50.0 60.0 70.0 Dist Norm 600 mm Dist Norm 1050 mm Dist Norm 1400 mm Dist Norm 600 mm Dist Norm 1050 mm Dist Norm 1400 mm distanza laterale 430 mm distanza laterale 240 mm
angolo (gradi)
Obiettivo da 12 mm Obiettivo da 6 mm
figura 6.42 Angoli fra le telecamere calcolati dalle calibrazioni stereo
Tenuto conto che in fase di acquisizione delle immagini quando si passava da un layout geometrico-ottico a quello corrispondente, ma con l’obiettivo diverso, generalmente non era nemmeno necessario variare l’angolo tra le telecamere o comunque al massimo si effettuava un piccolo aggiustamento, dovremmo avere valori praticamente identici tra i casi con obiettivo da 6 mm e da 12 mm.
Come si può vedere dalla figura, c’è proprio un’anomalia in corrispondenza di quel layout geometrico-ottico per cui si hanno valori elevati dell’errore sul raggio: la differenza tra il caso dell’obiettivo da 6 mm e quello da
6.ELABORAZIONE DEI DATI ED INTERPRETAZIONE DEI RISULTATI
12 infatti è superiore alle altre in modo evidente, e sicuramente tra i due è il caso dell’obiettivo da 6 quello anomalo perché mostra un angolo inferiore al corrispondente layout ma con distanza normale maggiore.
6.3.3 Fattore “distanza laterale”
L’analisi sulla distanza laterale ha confermato l’idea che si aveva in fase di previsione, ovvero che la precisione migliora adottando valori maggiori per questo parametro; bisogna comunque tenere presente che in caso di corpi con rilievi o incavi aumentano le zone d’ombra (quindi non ricostruibili): la scelta del valore da adottare per tale fattore va fatta quindi tenendo presente la forma dell’oggetto da ricostruire e le finalità principali della ricostruzione.
6.3.4 Fattore “tipo di ricostruzione”
L’analisi ha messo chiaramente in evidenza come la calibrazione del proiettore messa a punto in questa università migliori i risultati della tecnica di ricostruzione mono; la tecnica migliore però è risultata quella stereo, senza considerare il fatto che per essa si dovrebbero ottenere facilmente ulteriori miglioramenti: se non ci fosse stata infatti l’esigenza di calibrare il proiettore per i metodi mono avremmo potuto realizzare ed utilizzare un pannello di calibrazione con quadrati bianchi e neri (e non grigi), migliorando così il contrasto nelle immagini di calibrazione e quindi presumibilmente anche la precisione di calibrazione.
6.3.5 Fattore “distanza normale”
Abbiamo visto come questo sia stato il fattore di più difficile lettura: da un lato i risultati sui parametri “scostamento massimo” e “deviazione standard” hanno confermato le previsioni, ma senza quella grande regolarità nel dettaglio dei confronti fra i layout come per gli altri fattori; inoltre l’analisi sul parametro
6.ELABORAZIONE DEI DATI ED INTERPRETAZIONE DEI RISULTATI
“errore sul raggio” sembra fornire indicazioni inaspettate: la popolazione migliore risulta essere infatti quella della distanza normale maggiore.
Cerchiamo ora di esporre alcune considerazioni che potrebbero spiegare in parte il perché l’ipotesi che si era fatta in fase di previsione non sia confermata dai risultati sperimentali.
Avvicinandosi con il proiettore e le telecamere all’oggetto da ricostruire o al pannello di calibrazione si favorisce l’insorgenza di fenomeni di saturazione nelle zone dell’immagine dove si trovano i riflessi della luce del proiettore sull’oggetto: questo ci obbliga a tarare l’apertura dei diaframmi delle telecamere in posizione molto chiusa determinando uno scarso contrasto nel resto dell’immagine: questo potrebbe essere fonte di minor precisione; da un confronto tra le immagini dei vari layout geometrico-ottici, però, non si nota una differenza di contrasto tale da poter pensare che questo effetto sia particolarmente determinante: meglio fare allora ulteriori considerazioni.
Dato che dall’anova a n vie risulta che in realtà sul parametro raggio quello che influisce di più è la combinazione dei fattori di secondo livello “obiettivo – distanza normale” vediamo cosa si può vedere analizzando questa combinazione di fattori. -1 -0.5 0 0.5 1 1.5 2 Ob 12 - Dn 1400 Ob 12 - Dn 1050 Ob 12 - Dn 600 Ob 6 - Dn 1400 Ob 6 - Dn 1050 Ob 6 - Dn 600
Media Errori sul Raggio (mm)
6.ELABORAZIONE DEI DATI ED INTERPRETAZIONE DEI RISULTATI
Se ai risultati dell’anova a n vie applichiamo un multcompare che tenga conto solamente di questi due fattori otteniamo il grafico 6.43 da cui si può ottenere un’indicazione importante: i risultati in termini di raggio per la distanza normale di 600 mm risultano non molto soddisfacenti principalmente a causa dei layout con obiettivo da 6 mm: se limitiamo l’analisi agli obiettivi da 12 si vede che l’errore medio sul raggio minore si ha proprio alla distanza normale di 600 mm.
In effetti l’obiettivo da 6 mm è un tipo di obiettivo quasi grandangolare, caratterizzato cioè dall’avere una spiccata distorsione a botte che si manifesta in modo molto evidente nelle zone periferiche dell’immagine: i pixel dei bordi del CCD sono quindi soggetti da parte della lente a distorsioni elevate.
A parità di distanza normale, e quindi a parità di profondità di messa a fuoco, la distorsione nei bordi, rispetto al caso dell’obiettivo da 12 mm, risulta notevolmente superiore: le calibrazioni effettuate confermano questo effetto, (vedi figure 6.43 e 6.44); probabilmente in presenza di valori così elevati di distorsione è possibile che la calibrazione dia luogo a maggiori errori di valutazione della distorsione stessa (quindi a calibrazioni non precise).
Pixel error = [0.2726, 0.2378] Focal Length = (2609.19, 2603.84) Principal Point = (672.166, 439.345) Skew = -0.001563 Radial coefficients = (-0.2572, -0.2594, 3.722) Tangential coefficients = (-0.000311, -0.0001676) +/- [5.674, 6.118] +/- [4.601, 2.411] +/- 0.0001713 +/- [0.01775, 0.4941, 4.129] +/- [0.0001963, 0.0003865] 0 200 400 600 800 1000 1200 0 100 200 300 400 500 600 700 800 900
Distorsione della telecamera con obiettivo da 12 mm a 600 mm di distanza normale 5 5 5 5 5 5 10 10 10 10 10 15 15 figura 6.43
6.ELABORAZIONE DEI DATI ED INTERPRETAZIONE DEI RISULTATI Pixel error = [0.2723, 0.1982] Focal Length = (1275.26, 1271.72) Principal Point = (616.219, 448.428) Skew = -0.002455 Radial coefficients = (-0.1765, 1.532, -8.818) Tangential coefficients = (-0.0006051, 0.007153) +/- [3.643, 3.854] +/- [2.403, 1.296] +/- 0.0001941 +/- [0.01438, 0.241, 1.238] +/- [0.0002407, 0.0003259] 0 200 400 600 800 1000 1200 0 100 200 300 400 500 600 700 800 900
Distorsione della telecamera con obiettivo da 6 mm a 600 mm di distanza normale 50 50 50 50 50 50 100 100 100 100 150 figura 6.44 Pixel error = [0.1347, 0.1216] Focal Length = (1267.9, 1266.08) Principal Point = (576.998, 463.754) Skew = -0.0008353 Radial coefficients = (-0.1058, -0.4816, 3.664) Tangential coefficients = (0.0009713, 0.0001196) +/- [3.729, 3.819] +/- [1.83, 1.07] +/- 0.0001206 +/- [0.0122, 0.3873, 3.655] +/- [0.0001841, 0.0002461] 0 200 400 600 800 1000 1200 0 100 200 300 400 500 600 700 800 900
Distorsione della telecamera con obiettivo da 6 mm a 1400 mm di distanza normale
10 10 10 10 20 20 20 30 30 40 4050 figura 6.45
6.ELABORAZIONE DEI DATI ED INTERPRETAZIONE DEI RISULTATI
Variando la distanza normale, poiché si deve cambiare la messa a fuoco, la lente si sposta rispetto al CCD della camera i cui pixel saranno quindi soggetti a valori di distorsione da parte della lente diversi rispetto a prima.
In particolare aumentando la distanza normale si hanno valori inferiori di distorsione per i pixel periferici del CCD (il che è confermato dai risultati stessi della calibrazione, vedi figura 6.45); a questo si aggiunge il fatto che a distanze maggiori il pannello di calibrazione risulta più piccolo nelle immagini acquisite, quindi coinvolge un’area minore del CCD che se è centrata (come è plausibile) non presenta valori elevati di distorsione (vedi ancora figura 6.45): questo spiegherebbe come mai il comportamento migliore in termini di raggio per l’obiettivo da 6 mm si abbia a distanze normali maggiori).
Questo effetto di elevata variabilità della distorsione in base alla distanza normale si ha in maniera molto più accentuata per l’obiettivo da 6 mm (in effetti essendo quasi un grandangolo avere distorsioni elevate per messe a fuoco ravvicinate è una caratteristica voluta) e questo spiegherebbe come sia risultato così importante sul parametro “raggio” la combinazione dei fattori di secondo livello “distanza normale – tipo di obiettivo”.
Concludendo possiamo dire che dai risultati dell’analisi emerge come convenga sicuramente posizionare il sistema di acquisizione il più vicino possibile (entro il limite di cui si è parlato precedentemente) se l’acquisizione è volta più che altro a ricostruire una forma con poco rumore (ossia poca incertezza) e buon dettaglio (da vicino essendo le immagini dell’oggetto più grandi, i pixel coinvolti sono di più e quindi la nuvola avrà un numero di punti maggiore).
Rimane più difficile invece esprimere un'indicazione precisa su quale distanza normale convenga adottare quando lo scopo principale è ottenere misure con buona precisione; presumendo però di usare l’obiettivo da 12 mm (risultato sicuramente migliore) si può ritenere comunque più favorevole il posizionarsi a distanze normali minori.
Ad ogni modo sarebbe auspicabile un’ulteriore analisi specifica limitata a questo fattore e considerando possibilmente più di un parametro di precisione
6.ELABORAZIONE DEI DATI ED INTERPRETAZIONE DEI RISULTATI
dimensionale, ovvero utilizzando un’entità da ricostruire in cui si possano ricavare diverse misure preventivamente note.
Tale analisi dovrebbe prevedere per il fattore distanza normale un certo numero di livelli (superiore a tre) in modo da ottenere indicazioni più dettagliate sull’influenza del fattore stesso sui parametri di precisione dimensionale.
Dato che riguardo agli altri fattori abbiamo ottenuto indicazioni piuttosto chiare, tale analisi dovrebbe essere effettuata alla luce di queste indicazioni, ovvero utilizzando valori dei fattori che presumibilmente daranno i risultati migliori; questo consentirebbe di evitare il pericolo dell’influenza sull’analisi di livelli dei fattori che nella pratica non verranno comunque utilizzati e di avere distribuzioni di campioni più regolari e meno soggette a outlier.
Inoltre sarebbe auspicabile la definizione di un metodo pratico di valutazione oggettiva della bontà dei risultati delle calibrazioni, in modo da poter separare l’analisi tra calibrazione e ricostruzione: questo permetterebbe di avere ulteriori elementi utili per una conoscenza ancora più dettagliata delle influenze dei fattori e di individuare le cause di eventuali anomalie con più sicurezza.