4. Georeferenziazione dei dati.
4.1. Nozioni di base di cartografia.
Lo scopo di una carta geografica è quello di rappresentare sul piano zone più o meno estese della superficie terrestre, fornendo ad ogni utilizzatore la concezione più efficace possibile della realtà esistente.
La superficie che maggiormente si avvicina a quella effettiva della Terra è quella secondo la quale si disporrebbero i mari sottratti all’azione del vento, delle maree e delle correnti e sottoposti solamente agli effetti dell’attrazione terrestre e della forza centrifuga di rotazione della Terra. Tale forma è denominata Geoide ed è ottenibile effettuando il prolungamento del livello medio dei mari sotto i continenti fino ad avvolgere l’intero pianeta. Tale superficie priva di asperità e ovunque convessa, in ogni suo punto si mantiene normale al vettore gravità ed è una superficie equipotenziale.
Per poter sviluppare i calcoli con lo scopo di determinare la posizione planimetrica di ogni punto della superficie effettiva, non possedendo il geoide una espressione matematica, si introduce la superficie ellissoidica di riferimento.
La forma di tale superficie è data dall’appropriata grandezza di due dei parametri principali: il semiasse maggiore e lo schiacciamento determinati entrambi con delicate operazioni di geodesia. L’ellissoide scelto viene successivamente posizionato rispetto ad un punto della superficie effettiva dando così origine al Datum.
La cartografia ha lo scopo di rappresentare sul piano zone più o meno estese della superficie effettiva riportate sulla superficie ellissoidica.
Nell’ambito dello stesso continente ogni nazione ha scelto un proprio datum e quindi un proprio ellissoide per far coincidere il più possibile geoide ed ellissoide come indicato nella tabella 4.1 (da www.analisidifesa.it).
Nome Anno Semiasse maggiore Schiacciamento Delambre 1810 6.375.653 m 1/334.0 Walbeck 1819 6.376. 896 m 1/302.8 Everest 1830 6.377. 276 m 1/300.8 Airy 1830 6.377 .563 m 1/299.3 Bessel 1841 6.377.397 m 1/299.1 Pratt 1863 6 .378.245 m 1/295.3 Clarke 1866 6 .378 .206 m 1/294.9 Clarke modificato 1880 6 .378.249 m 1/293.5 Hayford (Elliss. Internaz. 1924) 1909 6 .378.388 m 1/297.0 Krasovskiy 1940 6 .378.245 m 1/298.3 Hough 1956 6 .378.260 m 1/297.0 Fischer (Mercury datum) 1960 6 .378.166 m 1/298.3 Fischer modificato 1968 6 .378.150 m 1/298.3 National Australian 1965 6 .378.165 m 1/298.3 South America 1969 6 .378.160 m 1/298.3 WGS 60 1960 6 .378.165 m 1/298.3 WGS 66 1966 6 .378.145 m 1/298.25 WGS 72 1972 6.378.135 ± 5m 1/298.258 WGS 84 1984 6.378.137 ± 2m 1/298.257
Tabella 4.1.( da www.analisidifesa.it). Gli ellissoidi di riferimento principali e le loro caratteristiche fisiche.
Successivamente la proiezione o rappresentazione cartografica è il modo con cui viene stabilita la corrispondenza biunivoca tra ogni punto dell’ellissoide ed il piano della carta, e tale corrispondenza viene stabilita analiticamente dalle equazioni della carta.
Per ogni proiezione viene definito anche un sistema di riferimento, rappresentato da un piano cartesiano, utilizzato per il calcolo delle coordinate.
Tipi di proiezioni:
• coniche,
• planari (polari, equatoriali, olblique), • cilindriche (dirette, trasverse, oblique), • gnomoniche,
• stereografiche (o polari), • ortogonali (o ortografiche).
I sistemi di riferimento maggiormente utilizzati in Italia sono:
• sistema ED 50 – UTM (fuso 32, fuso 33);
• sistema Roma M.Mario 40-Gauss Boaga (fuso ovest, fuso est); • sistema WGS 84- UTM (fuso 32, fuso 33).
Le immagini da satellite sono generalmente fornite dal produttore, come nel nostro caso, già in formato digitale (raster). I dati raster sono immagini espresse sotto forma di matrici bidimensionali i cui elementi, chiamati pixels, contengono dei valori, la cui posizione spaziale è implicita nella sequenza ordinata dei pixel stessi che nel campo geografico rappresentano una porzione di terreno.
Con il termine "georeferenziazione" si intende la procedura consistente nel posizionare, mediante punti di coordinate note chiamati punti di controllo o GCP (Ground Control Points), un 'immagine raster nella rispettiva zona del territorio reale, secondo un determinato sistema di riferimento (es. UTM o Gauss-Boaga).
In questa tesi il sistema geodetico-cartografico utilizzato per georeferenziare le immagini forniteci dal satellite Landsat è il sistema WGS
84 - UTM. La prima parte del nome (datum) descrive l’ellissoide di riferimento scelto per rappresentare la superficie della terra, e anche dove tale ellissoide è tangente alla terra stessa. La seconda parte invece descrive la proiezione cartografica utilizzata. Datum Ellissoide geocentrico: • semiasse maggiore a = 6378137; • semiasse minore b = 6356752,31; • schiacciamento f = 1/298,257223563;
• centro di massa della Terra coincidente con quello dell’ellissoide; • origine delle longitudini Greenwich.
Proiezione cartografica
Universal Transverse Mercator (UTM):
• La Terra viene suddivisa in 60 fusi longitudinali.
• Ciascun fuso ha un’ampiezza di 6°, la massima consentita per avere deformazioni tollerabili in una buona carta topografica.
• Sistema di tipo chilometrico in quanto si basa su un sistema di assi cartesiani che ha per asse delle ascisse l’equatore e per asse delle ordinate di volta in volta un meridiano di riferimento.
• Al meridiano centrale del fuso di appartenenza si assegna il valore convenzionale di 500 Km (falsa origine in longitudine).
• La numerazione dei fusi inizia dall’antimeridiano di Greenwich (Londra) procedendo verso Est.
Datum, tipo di proiezione, meridiani fondamentali e paralleli determinano un sistema di riferimento cartografico. Le coordinate riferite ad uno dei sistemi possono essere a loro volta geografiche, espresse in gradi
sessagesimali, o piane espresse in metri e riferite a determinati fusi di riferimento (Tomaselli, cap. 14).
4.2. Fasi della georeferenziazione.
La metodologia utilizzata, per entrambe le scene, è quella dei Ground Control Point o GCP (punti di controllo a terra) che si avvale di ortofoto AIMA per rilevare le coordinate geografiche degli oggetti su di esse rappresentati ed associarle agli oggetti omologhi rappresentati sull’immagine da satellite. Le ortofoto AIMA sono fotografie aeree di tutta l’Italia sotto i 2000 metri che hanno una risoluzione spaziale di 1 metro. Queste fotografie aeree sono già georeferenziate e servono, come già detto, per poter dare delle coordinate reali e precise a dei GCP.
Avendo utilizzato le ortofoto AIMA (che ci danno informazioni solo sulle coordinate x e y) come sistema per georeferenziare le immagini da satellite abbiamo inoltre bisogno anche di un Digital Elevation Model – DEM del territorio in esame che ci permetta di quotare i punti presenti nelle immagini.
Un DEM è una matrice in cui, ad ogni cella, è associato un valore di quota. La risoluzione di cella del modello digitale del terreno utilizzato in questo lavoro è di 40 metri.
I passi procedurali relativi sono di seguito descritti:
• Omogeneizzazione delle immagini, delle ortofoto AIMA e del DEM in un unico sistema geografico di riferimento.
• Individuazione dei Ground Control Point. • Registrazione delle immagini.
Omogeneizzazione delle immagini, delle ortofoto AIMA e del DEM in un unico sistema geografico di riferimento.
Le immagini satellitari Landsat – ETM 7 , le ortofoto AIMA di riferimento e il modello digitale del terreno per la regione Toscana sono stati riferiti al sistema di riferimento cartografico WGS 84 – UTM (fuso 32).
Un discorso supplementare va fatto per quel che riguarda il DEM da noi utilizzato.
Il formato di questo DEM che noi abbiamo a disposizione è dato nel programma ArcView (figura 4.1); quindi la prima operazione fatta è stata quella di passare il DEM in un formato leggibile dal programma Erdas 8.6, programma usato per creare le immagini.
Una volta effettuata questa operazione si è dovuto procedere con il settaggio in Erdas delle coordinate che volevamo utilizzare, ossia è stato necessario immettere nel programma il datum e la proiezione scelte per georeferenziare le immagini (WGS 84 – UTM).
Individuazione dei Ground Control Point.
Le due immagini Landsat–7 ETM sono state georeferenziate utilizzando le ortofoto AIMA ed individuando per entrambe gli stessi 10 GCP.
Questi punti sono stati scelti in modo tale da essere facilmente identificabili sia sull'immagine che sulla foto e possono in genere coincidere con incroci di strade, piste di aeroporti, capannoni industriali, ponti, moli, ecc.
Figura 4.1 ( fornito da IGG-CNR di Pisa). Immagine del DEM per la Toscana. Il DEM è ricampionato con passo 40 m.
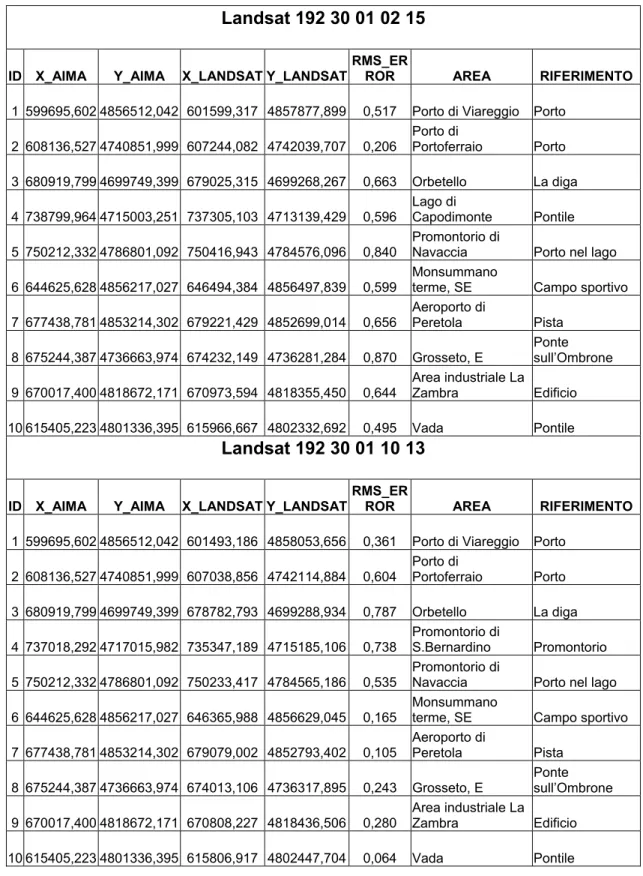
Nella tabella 4.2 vengono riportate le seguenti informazioni:
1. coordinate x e y dei punti sulle AIMA, 2. coordinate x e y dei punti sulle Landsat,
3. la differenza di posizione residua ossia il Root Mean Square error, 4. l’area dove è stato preso il punto,
Landsat 192 30 01 02 15
ID X_AIMA Y_AIMA X_LANDSAT Y_LANDSATRMS_ERROR AREA RIFERIMENTO
1 599695,602 4856512,042 601599,317 4857877,899 0,517 Porto di Viareggio Porto 2 608136,527 4740851,999 607244,082 4742039,707 0,206
Porto di
Portoferraio Porto 3 680919,799 4699749,399 679025,315 4699268,267 0,663 Orbetello La diga 4 738799,964 4715003,251 737305,103 4713139,429 0,596 Lago di Capodimonte Pontile 5 750212,332 4786801,092 750416,943 4784576,096 0,840 Promontorio di Navaccia Porto nel lago 6 644625,628 4856217,027 646494,384 4856497,839 0,599
Monsummano
terme, SE Campo sportivo 7 677438,781 4853214,302 679221,429 4852699,014 0,656 Aeroporto di Peretola Pista 8 675244,387 4736663,974 674232,149 4736281,284 0,870 Grosseto, E Ponte sull’Ombrone 9 670017,400 4818672,171 670973,594 4818355,450 0,644 Area industriale La Zambra Edificio 10 615405,223 4801336,395 615966,667 4802332,692 0,495 Vada Pontile
Landsat 192 30 01 10 13
ID X_AIMA Y_AIMA X_LANDSAT Y_LANDSAT
RMS_ER
ROR AREA RIFERIMENTO
1 599695,602 4856512,042 601493,186 4858053,656 0,361 Porto di Viareggio Porto 2 608136,527 4740851,999 607038,856 4742114,884 0,604 Porto di Portoferraio Porto 3 680919,799 4699749,399 678782,793 4699288,934 0,787 Orbetello La diga
4 737018,292 4717015,982 735347,189 4715185,106 0,738 Promontorio di S.Bernardino Promontorio 5 750212,332 4786801,092 750233,417 4784565,186 0,535
Promontorio di
Navaccia Porto nel lago 6 644625,628 4856217,027 646365,988 4856629,045 0,165
Monsummano
terme, SE Campo sportivo 7 677438,781 4853214,302 679079,002 4852793,402 0,105
Aeroporto di
Peretola Pista 8 675244,387 4736663,974 674013,106 4736317,895 0,243 Grosseto, E Ponte sull’Ombrone 9 670017,400 4818672,171 670808,227 4818436,506 0,280 Area industriale La Zambra Edificio 10 615405,223 4801336,395 615806,917 4802447,704 0,064 Vada Pontile
Tabella 4.2. Informazioni sui GCP utilizzati per la georeferenziazione delle due immagini Landsat.
Registrazione delle immagini.
La procedura di registrazione comporta le due azioni di warp (deformazione) e resampling (ricampionamento).
La prima azione ha lo scopo di adattare l’immagine satellitare grezza alle coordinate geografiche attribuitegli con i GCP ed di restituire agli oggetti le dimensioni reali in scala. Per poter fare questo necessitiamo di una matrice di trasformazione.
La seconda si pone l’obiettivo di ricostruire, per i pixels dell’immagine deformata, il contenuto radiometrica originario.
La matrice di trasformazione viene realizzata a partire dai GCP. Consiste di coefficienti che sono usati in un’equazione polinomiale per convertire le coordinate. L’obiettivo nel calcolo dei coefficienti di trasformazione è ottenere l’equazione polinomiale per la quale c’è la più piccola aggiunta di errori quando essi vengono usati per convertire le coordinate di origine (raster) in quelle geografiche. Non è sempre possibile ottenere dei coefficienti che non producono errori.
Il warp per le immagini Landsat–7 ETM è stato effettuato con un algoritmo polinomiale di primo grado funzionale alla elaborazione delle immagini georeferenziate con un numero limitato di GCP:
Xo = b 1+ b 2 X i + b 3 Y i Yo = a 1 + a 2 X i + a3 Y i
con Xo e Yo coordinate output (proiezione UTM), Xi e Yi coordinate raster di
input, a e b (1,2,3) coefficienti della matrice di trasformazione.
Una trasformazione polinomiale di questo tipo produce normalmente un errore nella trasformazione delle coordinate, il che significa che le coordinate stimate a partire dai GCP non possono uguagliare esattamente quelle cartografiche di riferimento.
La distanza tra le coordinate di riferimento dei GCP e la curva è chiamata RMS (Root Mean Square) error . In altre parole, è la differenza tra le desiderate coordinate di output per i GCP e le attuali coordinate di output
per gli stessi punti (quando i punti sono cambiati con una trasformazione geometrica). RMS error è calcolato come segue:
RMS error = {(Xr – Xi)2 + (Yr - Y i )2}-1/2
dove Xi e Y i sono le coordinate di input originali, mentre Xr e Yr sono le
coordinate ritrasformate (Erdas 8.6 Field Guide, cap. 9).
L’ RMS error è usualmente espresso in pixels o in metri. Nel nostro caso si è ritenuto accettabile un RMS error totale medio inferiore ad 2 pixels, ma ciò dipende comunque dalla precisione richiesta e dalle dimensioni del pixel dell'immagine originaria.
Ciascun GCP contribuisce all’errore totale ed è possibile selezionare i punti di controllo escludendo quelli che presentano valori di errore troppo alti per far scendere l’errore medio complessivo.
Bisogna però tener conto dei seguenti fattori:
• i punti devono essere ben distribuiti nell’immagine, non si possono quindi escludere tutti quelli di una determinata zona;
• più grande è l’immagine e più GCP devono essere acquisiti;
• se si aumenta il grado del polinomio (trasformazioni di ordine più alto) diminuisce l’errore medio ma aumentano le possibilità di introdurre distorsioni nell’immagine.
La fase finale del processo di georeferenziazione consiste nel creare un’immagine di output nella quale i valori dei pixels vengono ricampionati (resampling) in base ad un determinato algoritmo (Erdas 8.6 Field Guide, cap. 9). Infatti, ogni volta che su una immagine è stata applicata una trasformazione geometrica per rettificazione, il risultato è che i pixels si trovano in una nuova posizione, più accurata, ma la cui radiometria non rappresenta più i valori reali misurati sulla scena. Per questa ragione l’immagine deve essere ricostruita per posizionare i valori originali di radianza nella nuova griglia.
Una stima dei nuovi valori di radianza e quindi dei nuovi numeri indice dei pixel viene fatta mediante delle procedure di interpolazione matematica che sono dette tecniche di ricampionamento.
In genere esistono tre tipi di algoritmi che possono essere applicati:
• Nearest neighbour.
• Bilinear interpolation.
• Cubic convolution.
Nel nostro caso il resampling per entrambe le immagini è stato ottenuto applicando un algoritmo nearest neighbour poiché esso lascia il valore radiometrico del pixel invariato.
Con questa tecnica, che è un’approssimazione del primo ordine, il valore di radianza o numero indice (NI) assegnato è il numero indice del pixel che ha le coordinate (M,N) di riga e colonna (valori interi) più vicine alle coordinate (X,Y) ottenute dalla trasformazione geometrica (valori reali). Così per esempio, se da una trasformazione geometrica si ottengono i valori X = 4,37 e Y = 15,75, il valore di radianza di questo pixel sarà il numero indice del pixel con coordinate di riga M = 16 e di colonna N = 4. L’accuratezza geometrica ottenibile è dell’ordine di ½ pixel.
Le brusche variazioni nei valori dei pixels possono provocare sull’immagine così ricampionata un effetto di scalinatura o di discontinuità apparente soprattutto nella rappresentazione di elementi lineari.
Di contro questo tipo di interpolazione mantiene inalterati i valori di radianza, è semplice da implementare e necessita di tempi di calcolo molto limitati (Brivio et al., 1992).