CAPITOLO VI
SISTEMA PER STIME MULTIPLE CONTEMPORANEE
1.1 INTRODUZIONE E SCHEMA GENERALE
1.2 DESCRIZIONE DEI COMPONENTI
1.3 ELABORAZIONE DEI DATI SALVATI
1.1 Introduzione e schema generale
In questo capitolo viene esposta una procedura per la stima multipla dei parametri caratteristici di un processo come: margine di ampiezza, margine di fase, banda passante, sensibilità e picco di risonanza a ciclo chiuso.
Questo capitolo si concentra nel chiarimento del funzionamento della procedura nel suo complesso e la spiegazione di ogni componente di cui è costituito. Non verrà spiegato in
questo capitolo la tecnica del criterio del cerchio per calcolare i parametri caratteristici di un processo in quanto ciò è stato già fatto nel relativo capitoloII.
Questa proceduta come quella SATV [9],[6] è stata realizzata in modo da poter eliminare l’approssimazione introdotta dalla teoria della funzione descrittiva. In figura VI.1.1 è mostrato lo schema generale che realizza questo metodo.
1 1 s +s+502 s +11s +11s+13 2 sistema 90 num. campioni White Noise controlloseriepassxxx S-Function f req on/of f y Oscillatore sin si so tc N w on/of f stima FFT Demux
Figura VI.1.1 – Rappresentazione a blocchi dello schema di principio del modello
L’idea su cui si basa il funzionamento dello schema è quella di realizzare un dispositivo che invii in ingresso al sistema G(s) un segnale sinusoidale con una frequenza tale da ottenere per ogni processo ottenuto con il criterio del cerchio P(s), lo sfasamento tra l’uscita yi(t) e u(t) pari a – radianti.
In questo metodo è stato eliminato l’utilizzo del relé in retroazione e quindi è stato anche eliminato l’errore introdotto da quel componente. Il sistema con funzione di trasferimento G(s) ha come ingresso un segnale sinusoidale proveniente dal blocco Oscillatore sinusoidale il quale emette una sinusoide ad una frequenza pari a quella desiderata dal
blocco controlloserie. Il controllo dello sfasamento dell’uscita del sistema G(s) rispetto all’ingresso è demandato al blocco FFT il quale stima la trasformata di Fourier (la parte reale e quella immaginaria) della funzione di trasferimento di G(s) alla frequenza immessa nel sistema dall’oscillatore sinusoidale. Solo dopo che è stato stimato tale valore dal blocco FFT, il blocco controlloserie effettua il calcolo della trasformata di Fourier per tutti gli altri processi P(s) implicati nel calcolo delle stime utilizzando il criterio del cerchio. Tale blocco dopo aver calcolato lo sfasamento per ogni processo P(s) decide la nuova frequenza da immettere nel sistema G(s).
1.2 DESCRIZIONE DEI COMPONENTI
In questo paragrafo verrà esaminato il funzionamento di ogni componente necessario al funzionamento dello schema generale.
Blocco FFT
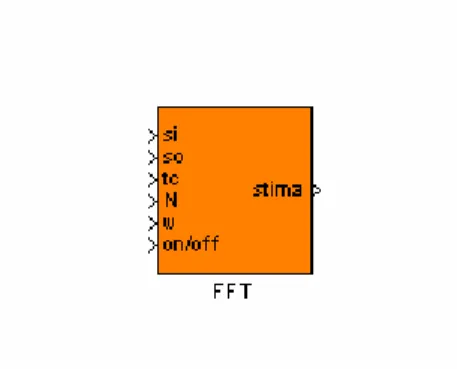
Il modello del blocco FFT utilizzato per il calcolo dell’algoritmo di Fast Fourier Trasform è riportato in figura VI.2.1
Questo è un dispositivo in grado di stimare il modulo e la fase della funzione di trasferimento G(s) ad una determinata frequenza .
Tale blocco è formato da sei ingressi:
o Si Ingresso in cui viene immesso il segnale che andrà in ingresso al sistema
fisico G(s)
o So Ingresso in cui viene inserito il segnale in uscita dal sistema fisico G(s) o Tc Ingresso che rappresenta il tempo di campionamento a cui campionare i
due segnali si ed so
o N Ingresso che indica la dimensione del buffer in cui verranno immessi i due
segnali da analizzare; tale ingresso è costante e pari a 90 elementi. Tale ingresso deve contenere sempre un numero pari.
o w Ingresso che indica la pulsazione alla quale l’algoritmo FFT deve restituire
le stime di modulo e fase.
o On/off Ingresso che abilita o disabilita l’immissione dei segnali nel blocco
FFT (1 = abilitato / 0 = disabilitato).
In uscita a tale blocco si ha un vettore di tre elementi:
o Bit validità Tale bit indica se le stime in uscita dal blocco FFT sono valide o meno ( 1 = stime valide / 0 = stime non valide )
o Stima modulo Tale valore indica la stima del modulo della funzione di trasferimento G(s) alla frequenza indicata dall’ingresso w calcolata con
o Stima fase Tale valore indica la stima della fase della funzione di trasferimento G(s) alla frequenza indicata dall’ingresso w calcolata con l’algoritmo FFT
In figura VI.2.2 è rappresentato il vettore in uscita dal blocco FFT.
bit validità Stima modulo Stima fase
Figura VI.2.2 – Vettore rappresentante il vettore in uscita dal blocco FFT.
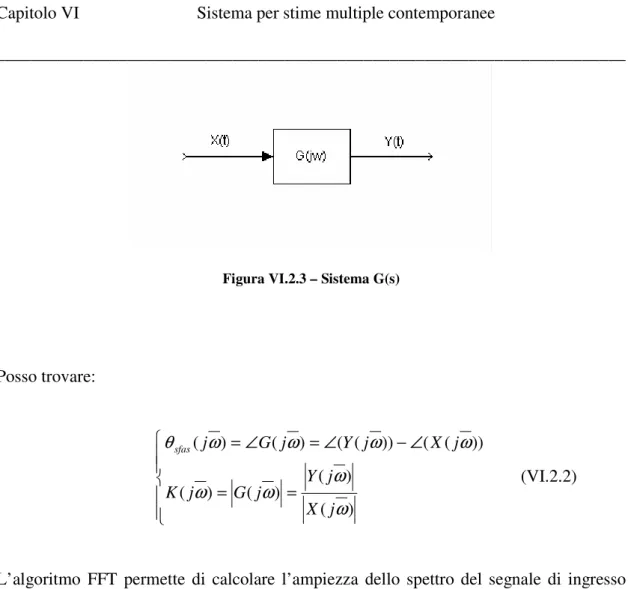
Per capire meglio come tale blocco riesce a stimare il modulo e la fase della funzione di trasferimento ad una determinata frequenza, si consideri un segnale sinusoidale di pulsazione . Sia x(t) il segnale di ingresso al sistema G(s) o segnale di riferimento avente ampiezza X e fase in, sia y(t) il segnale con ampiezza Y e fase out in uscita dal sistema G(s). Il blocco FFT permette di stimare la fase in e l’ampiezza X del segnale di ingresso inoltre calcola la fase out e l’ampiezza Y del segnale di uscita.
Essendo il sistema G(s) un sistema lineare, esso può introdurre delle modifiche al segnale di riferimento pari a: ) ( ) ( out in j sfas j
XKe
XKe
Y
=
θ −ϑ=
ϑ (VI.2.1)Figura VI.2.3 – Sistema G(s) Posso trovare: = = ∠ − ∠ = ∠ = ) ( ) ( ) ( ) ( )) ( ( )) ( ( ) ( ) ( ω ω ω ω ω ω ω ω θ j X j Y j G j K j X j Y j G j sfas (VI.2.2)
L’algoritmo FFT permette di calcolare l’ampiezza dello spettro del segnale di ingresso )
(jω
X e del segnale di uscita Y(jω), inoltre restituisce la fase del segnale in ingresso )
(jω X
∠ (fase di riferimento) e la fase del segnale di uscita ∠Y(jω).
Avendo tutti i dati necessari per applicare la (VI.2.2) si riesce ad ottenere la stima del modulo e fase della funzione di trasferimento G(j ) per una determinata frequenza.
Il problema che si è posto durante lo sviluppo di questa tesi è stato quello di realizzzare delle simulazioni che effettuino delle stime multiple dei parametri di un sistema, in tempi limitati. Il fattore principale che rallenta le simulazioni è quello dell’attesa del riempimento del buffer che sarà utilizzato dall’algoritmo FFT. Infatti per effettuare una stima del modulo e fase del sistema a basse frequenze (0.1 rad/s), bisogna immettere in esso una sinusoide a tale frequenza ma prima che il segnale abbia compiuto un periodo, il tempo trascorso si aggira intorno ai 63 secondi.
Per effettuare una simulazione che sia allo stesso tempo veloce e con buoni risultati, si è dedeciso di campionare il segnale in modo che all’interno di un periodo vi siano sempre 30 campioni e di immettere nel buffer almeno tre peiodi del segnale quindi 90 campioni. In questo modo dovrò attendere circa 60 secondi per il riempimento del buffer per il calcolo dell’algoritmo FFT nel caso di un segnale di 0.3 rad/s; però man mano che aumento la frequenza del segnale da inviare nel sistema fisico, i tempi diminuiscono notevolmente. Ad una frequenza di 0.8 rad/s infatti devo solo attendere 23 secondi circa.
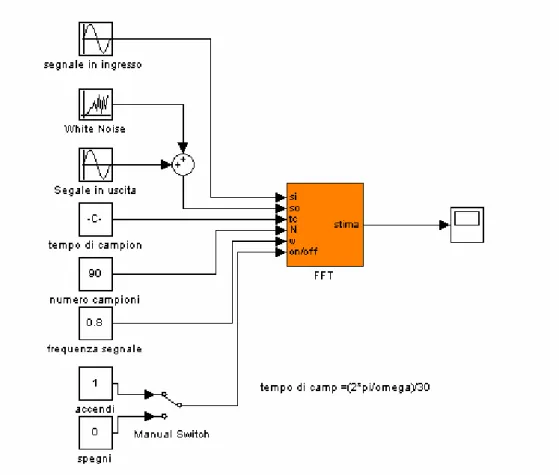
Le prove di simulazione della stima del modulo e fase della funzione di trasferimento di un sistema sono state effettuate utilizzando il blocco FFT descritto in precedenza. Lo schema a blocchi utilizzato nelle simulazioni è mostrato in figura VI.2.4
Il segnale y(t) (nominato segnale in uscita) è sfasato di – /6 radianti rispetto al segnale nominato segnale in ingresso. Entrambi i segnali hanno una pulsazione pari a 0.8 rad/s. Solamente il segnale in uscita è sovrapposto da un rumore bianco ( blocco chiamato white noise). Questo componente permette di simulare il comportamento del blocco FFT anche nel caso in cui il segnale che rappresenterebbe il segnale in uscita dal sistema y(t) fosse affetto da rumore. Il peso del rumore sul segnale y(t) può essere calcolato attraverso il rapporto tra la potenza del segnale e quella di rumore.La potenza di un segnale sinusoidale di ampiezza A vale
2
2 sin
A
P = , mentre per il rumore bianco la potenza è data dalla varianza del processo =σ2
−noise
white
P dove è la deviazione standard. Nelle prove di simulazione non è stato calcolato SNR ma, èstato sempre considerato l’ammontare di rumore sul segnale y(t) in termini percentuali. Le prove sono state effettuate facendo l’ipotesi plausibile che la componente di rumore si sommi al segnale y(t) come mostrato in figura VI.2.4.
In ingresso al sistema si ha il tempo di campionamento, che per quel tipo di segnale vale 262 . 0 30 854 . 7 30= = = T
tc secondi. Il numero di campioni è fisso a 90 elementi e la
frequenza del segnale da cercare in questo caso è chiaramente 0.8 rad/s.
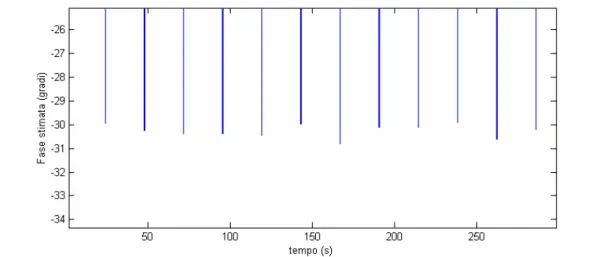
Quando si effettua una stima in assenza di rumore, il blocco FFT effettua una stima precisa dell’angolo; come si può vedere dalla figura VI.2.5 la stima effettuata è di –pi/6 radianti.
Figura VI.2.5 – Stime di fase effettuate dal blocco FFT senza rumore sul segnale y(t)
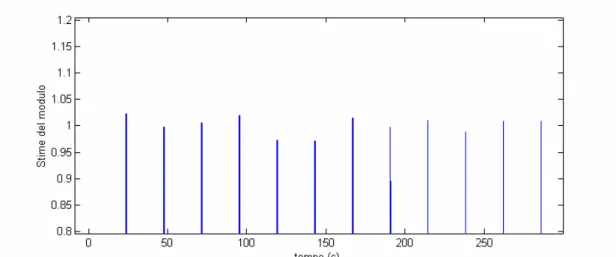
In figura VI.2.6 si può verificare la correttezza del modulo dell’ipotetico sistema che ha modificato i segnale x(t) nel segnale y(t). Il risultato è 1 perchè i due segnali hanno la stessa ampiezza.
Gli impulsi che si vedono nelle due figure precedenti, sono in realtà dei segnali rettangolari che mantengono la stima per un tempo che è sufficiente ad essere acquisito dal blocco controlloserie. Si può inoltre notare come già detto sopra che i tempi di stima per una frequenza di 0.8 rad/s sono circa di 23 secondi.
Di seguito viene analizzato il comportamento del blocco FFT in presenza di rumore. Si effettuano delle similazioni con rumore sul segnale y(t) pari al 20% (figura VI.2.7/8), 40% (figura IV.2.9/10).
Figura VI.2.7 – Stime di fase effettuate dal blocco FFT con rumore del 20% sul segnale y(t)
Figura VI.2.9 - Stime di fase effettuate dal blocco FFT con rumore del 40% sul segnale y(t)
Figura VI.2.10 - Stime del modulo effettuato dal blocco FFT con rumore del 40% sul segnale y(t)
Si può notare che in caso di rumore le stime di modulo e fase rimangono comunque abbastanza buone (errore massimo 0.8 gradi con rumore del 40% e 0.5 gradi nel caso di rumore del 20 %). Questo si ha perchè l’algoritmo FFT è abbastanza tollerante al rumore e la precisione ottenuta è conseguenza diretta del tempo di simulazione e quindi del numero di periodi del segnale immessi nel buffer (scelto in fase di progettazione).
Blocco controlloserie
Il modello del blocco controlloserie utilizzato che gestisce il controllo delle frequenze e del raggiungimento delle stime con il criterio [8],[12] del cerchio è riportato in figura VI.2.11
Figura VI.2.11 - Modello che realizza la gestione del controllo delle frequenze.
Questo modello ha come ingresso un vettore di tre elementi:
o Bit validità Tale bit indica se le stime in uscita dal blocco FFT sono valide o meno ( 1 = stime valide / 0 = stime non valide )
o Stima modulo Tale valore indica la stima del modulo della funzione di trasferimento G(s) alla frequenza indicata dall’ingresso w calcolata con l’algoritmo FFT
o Stima fase Tale valore indica la stima della fase della funzione di trasferimento G(s) alla frequenza indicata dall’ingresso w calcolata con l’algoritmo FFT
Questo vettore è il solito vettore in uscita dal blocco FFT (si veda figura VI.2.2).
o On/off tale bit serve per attivare o disattivare il blocco FFT e il blocco oscillatore sinusoidale.
o tale valore rappresenta la frequenza (rad/s) alla quale effettuare le stime. Tale valore viene passato solo al blocco FFT.
o Tc indica il tempo di campionamento al quale il blocco FFT
dovrà effettuare il campionamento dei segnali
In figura VI.2.12 è rappresentato il vettore in uscita dal blocco controlloserie:
on/off Tc
Figura VI.2.12 - Vettore rappresentante il vettore in uscita dal blocco controlloserie.
Tale blocco può abilitare/disabilitare gli altri 2 blocchi presenti in modo da permettere la sincronizzazione dei dati tra i blocchi stessi. Questo blocco inoltre è il blocco che decide quale frequenza far controllare dal blocco FFT e a quale frequenza si devono campionare i segnali. Inizialmente esso emette come uscita il vettore [1 0.3 0.698] che impone al blocco oscillatore sinusoidale di accendersi e di emettere un segnale sinusoidale alla pulsazione di 0.3 rad/s; impone inoltre al blocco FFT di cominciare a ricevere nel suo buffer i segnali si e so, avvisa inoltre il blocco FFT che la frequenza da controllare è quella che ha come frequenza 0.3 rad/s e che i segnali vanno campionati alla frequenza di 1/Tc.
Una volta effettuata l’uscita il modello controlloserie si mette in attesa che il bit validità in uscita dal blocco FFT valga 1 (sono state effettuate le stime di modulo e fase ed i dati sono pronti). Quando tale bit vale 1 si prendono come ingressi la stima del modulo
) (jω
G e della fase ∠G(jω) della funzione di trasferimento G(s) alla frequenza ω.
) ( ) ( ) (jω Rω jI ω G = + (VI.2.3)
Una volta calcolati i valori di G(j ) stimati come in (VI.2.3), essi vengono elaborati per ogni stima da dover effettuare in modo da trovare i valori della fase e modulo degli altri processi calcolati con la tecnica del criterio del cerchio attraverso le seguente formula:
(
)
(
( ))
( ) ) ( ) ( 1 ) ( ) ( ) ( ) ( 1 ) ( ω ω ω ω ω ω ω ω ω ω ω jI k R jI h R j k jI R h jI R j j P + + + − = + + − + = (VI.2.4)dalla quale si può facilmente calcolare il modulo P(jω) e la fase ∠P(jω) alla frequenza ω. Tali valori calcolati per ogni stima da dover effettuare vengono salvati in maniera permanente in un file che contiene oltre a tutte le stime anche la frequenza alla quale sono state effettuate le stime.
A questo punto se quella appena ricevuta è la prima stima, la precedente frequenza viene incrementata di un passo fisso che in questo caso è stato scelto di 0.1 rad/s e viene attivato l’oscillatore sinusoidale e il blocco FFT a tale nuova frequenza. Solo dopo aver acceso gli altri blocchi il controlloserie si rimette in attesa che il bit validità in uscita dal blocco FFT valga 1.
Se invece la stima ricevuta non era la prima, viene controllato se la fase di qualche processo calcolato con il criterio del cerchio ha attraversato la fase -180 gradi (tra la stima precedente e quella attuale si trova la fase -180). Se nessuna di esse ha effettuato tale attraversamento o vi è stato un attraversamento ma una delle due stime (prima o dopo l’attraversamento) è sufficientemente vicina alla fase di -180 gradi, viene calcolata la nuova frequenza incrementando il valore della precedente frequenza del passo fisso (0.1 rad/s). Se invece vi è stato un attraversamento e nessuna delle due stime (prima o dopo l’attraversamento) è sufficientemente vicina alla fase -180 gradi allora il blocco controlloserie torna indietro in frequenza in maniera dicotomica fino a che una stima di fase non si è avvicinata sufficientemente alla fase di -180 gradi. Una volta raggiunta la stima voluta tornando indietro in frequenza viene ripristinata la frequenza alla quale era
sorto il problema di attraversamento di fase e si continua a cercare nuovi attraveramenti. La fine della simulazione può essere decisa in 2 modi:
o Esaurimento di tempo concesso
o Se le stime a frequenze successive non subiscono modifiche rilevanti
Di seguito viene evidenziato per maggiore chiarezza il flow chart del blocco controlloserie. INIZIO STIMA ARRIVATA ATTENDI STIMA NO
- CALCOLA STIME FASE DEI PROCESSI CON CRITERIO DEL CERCHIO
- AVANZA FREQUENZA DI UN PASSO - ACCENDI I MODULI
SI
1 STIMA ARRIVATA ATTENDI STIMA NO
- CALCOLA LE STIME DI FASE DEI
PROCESSI CON CRITERIO DEL CERCHIO - CONTROLLA LA PRESENZA DI ATTRAVERSAMENTI SI STIMATO ATTRAVERSA MENTO NO - AVANZA FREQUENZA DI UN PASSO - ACCENDI I MODULI 2 SI 3
2
- CALCOLA NUOVA FREQUENZA IN MODO DICOTOMICO - ACCENDI I MODULI ATTENDI STIMA STIMA ARRIVATA NO
- CALCOLA LE STIME DI FASE DEI PROCESSI CON CRITERIO DEL CERCHIO
STIMA VICINA A
-180°
- SALVA ULTIMA FREQUENZA CONTROLLATA
NO
- CARICA LA MAGGIORE
FREQUENZA CONTROLLATA 3
Oscillatore Sinusoidale
Il modello e lo schema circuitale dell’oscillatore sinusoidale sono riportati in figura VI.2.13/14.
Figura VI.2.13 – Modello Oscillatore sinusoidale
L’oscillatore sinusoidale è un sistema non lineare, desritto dalle seguenti equazioni di stato: = + = • • 1 2 1 2 2 1 1 0 0 1 0 x z x x x x ω δ ω (VI.2.5)
dove, (ingresso on/off), detto fattore di attivazione, è definito come:
≥ < = 0 0 1 0 t t t t δ (VI.2.6)
con t0 rappresentante il tempo di partenza. L’evoluzione temporale della (VI.2.5) è:
⋅ + = At teAt− B d x x e x x 0 ) ( 2 1 2 1 ( ) ) 0 ( ) 0 ( τ τ δ τ (VI.2.6) dove: = = − − − − − = − 0 1 0 1 0 ) cos( ) sin( ) sin( ) cos( 2 ) ( B A t t t t eAt ω ωτ ω ωτ ω ω ω ωτ ω ωτ ω τ (VI.2.7)
Con condizioni iniziali nulle su entrambi gli integratori x1(0)=x2(0)=0, tenendo conto della (VI.2.6) si ottiene:
− = t t t A Bd e x x 0 ) ( 2 1 τ τ (VI.2.8)
In base alla (VI.2.8) e alla prima equazione della (VI.2.7) si giunge alla seguente relazione: − − = − = t t t t d t t t x d t t t x 0 0 ) sin( ) ( ) cos( ) ( 0 2 0 1 τ ω ω ω τ ω ω (VI.2.9)
Si perviene all’espressione temporale delle variabili di stato:
− = − = ) cos( ) ( ) sin( ) ( 0 2 0 1 t t t x t t t x ω ωω ω ω (VI.2.10)
in base alla (VI.2.5) e alla (VI.2.6):
< ≥ − = 0 0 0 0 ) sin( ) ( t t t t per per t t t z ω ω (VI.2.11)
In figura VI.2.15 è mostrato il funzionamento del blocco Oscillatore sinusoidale avente per ingresso freq il valore di 10 rad/s e nell’ingresso on/off un gradino unitario attivato
dopo 4 secondi. Come si può notare l’uscita y rende proprio la sinusoide alla pulsazione desiderata.
Figura VI.2.15 – Oscillatore sinusoidale attivato dopo 4 secondi da un gradino unitario.
1.3 Elaborazione dei dati salvati
Una volta che la simulazione è volta al termine si può accedere a un file in cui sono stati salvati i dati di simulazione. Questo viene effettuato dal file matlab visualizza.m attraverso il quale è possibile rendere visibili le stime trovate ed i relativi diagrammi di fase delle funzioni di trasferimento dei processi che sono stati ricostruiti con i dati della simulazione.