157
7
EQUILIBRATURA DEGLI INDUTTORI
“L’equilibratura è una procedura per mezzo della quale la distribuzione di massa di un rotore viene controllata e, se necessario, aggiustata per assicurare che le vibrazioni e/o le forze sui cuscinetti, alla frequenza corrispondente alla velocità di esercizio, siano all’interno di limiti specificati” (ISO 1925).
158
7.1 Introduzione
Lo sbilanciamento è la più comune sorgente di vibrazione nelle macchine rotanti e in genere può essere causato da:
asimmetrie (spostamento dell’anima nei getti, superfici ruvide nei forgiati, configurazioni asimmetriche);
materiali non omogenei (soffiature nei rotori fusi, inclusioni in materiali forgiati o laminati, variazioni della struttura cristallina causate dal cambiamento di densità del materiale);
deformazioni alla velocità di esercizio;
eccentricità (perni non concentrici o circolari); disassamento dei cuscinetti;
squilibrio aerodinamico o idraulico (cavitazione o turbolenza); gradienti termici (rotori di turbine a vapore).
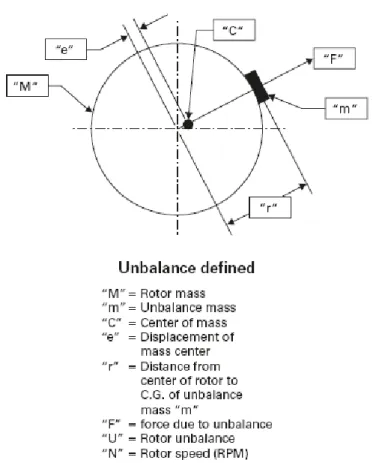
Figura 7.1: Rappresentazione dello sbilanciamento di un rotore (Norfield, 2006).
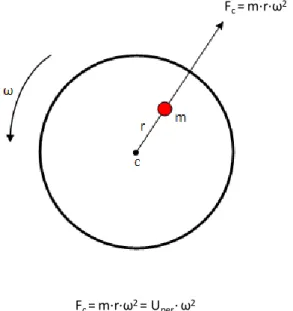
Lo sbilanciamento di un rotore può essere rappresentato come una singola massa posta ad un particolare raggio :
159
dove è la massa del rotore, mentre , chiamato sbilanciamento specifico, rappresenta lo spostamento del centro di massa del rotore dal centro di rotazione ideale.
7.2 Tipi di sbilanciamento
Lo sbilanciamento può essere di quattro tipi: statico, di coppia, quasi-statico e dinamico.
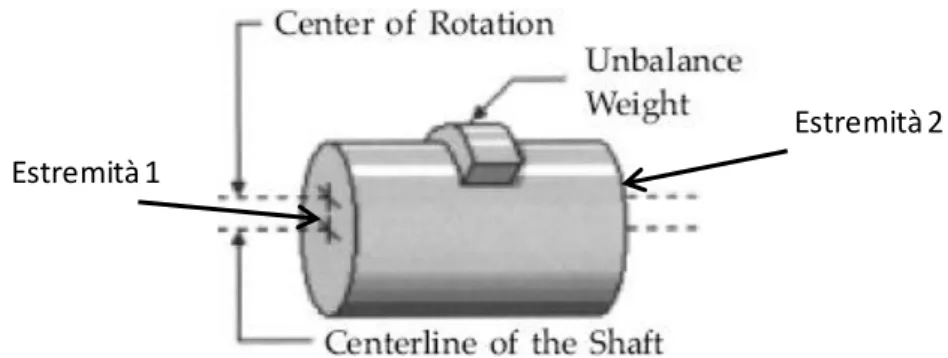
7.2.1 Sbilanciamento statico
Lo sbilanciamento statico, mostrato in figura 7.2, è definito come uno squilibrio dove il centro di massa del rotore è spostato parallelamente rispetto al centro di rotazione ideale.
Figura 7.2: Sbilanciamento statico (McMillan, 2004).
Con un elemento rotante sbilanciato staticamente, l’ampiezza e la fase della vibrazione, ad entrambe le estremità del rotore, sono le stesse. Questo sbilanciamento può essere facilmente corretto aggiungendo o rimuovendo la giusta quantità di materiale nel piano opportuno.
Figura 7.3: Sbilanciamento statico corretto con una massa (McMillan, 2004). Estremità 2 Estremità 1
160
In figura 7.3, ad esempio, una singola massa, pari allo squilibrio, è posizionata sullo stesso piano dello sbilanciamento a 180° da quest’ultimo; questo fa sì che il centro di massa ed il centro di rotazione ideale coincidano.
Figura 7.4: Sbilanciamento statico corretto con due masse (McMillan, 2004).
In figura 7.4, invece, due masse identiche, la cui somma è pari allo squilibrio, sono posizionate a distanze uguali dallo sbilanciamento sempre a 180° da quest’ultimo; anche in questo caso il centro di massa ed il centro di rotazione ideale coincidono.
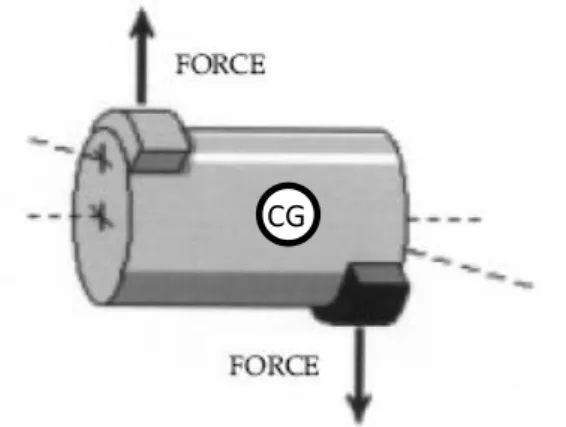
7.2.2 Sbilanciamento di coppia
Lo sbilanciamento di coppia, mostrato in figura 7.5, è definito come la condizione di sbilanciamento per cui l’asse di rotazione reale interseca quello ideale nel centro di massa del rotore.
Figura 7.5: Sbilanciamento di coppia (McMillan, 2004).
Nonostante sia bilanciato staticamente, se messo in rotazione, il rotore tenderebbe ad oscillare intorno al suo centro di massa; entrambe le estremità vibrerebbero con la stessa intensità, ma con fase opposta. Lo sbilanciamento di coppia, quindi, può essere rilevato solo con rotore in movimento.
161
A differenza dello sbilanciamento statico, lo sbilanciamento di coppia non può essere corretto aggiungendo o rimuovendo massa su un solo piano, ma la correzione deve avvenire su due o più piani.
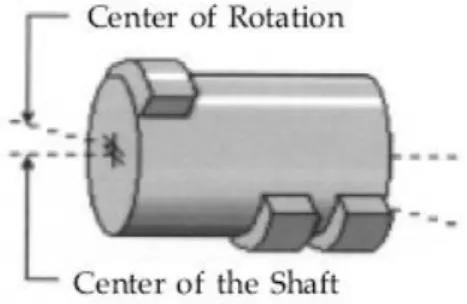
7.2.3 Sbilanciamento quasi-statico
Lo sbilanciamento quasi-statico, mostrato in figura 7.6, è definito come la condizione di sbilanciamento per cui l’asse di rotazione reale interseca quello ideale, ma non nel centro di massa del rotore. È quindi una combinazione di quello statico e di quello di coppia.
Figura 7.6: Sbilanciamento quasi-statico (McMillan, 2004).
Lo sbilanciamento quasi-statico può essere rilevato attraverso l’ampiezza della vibrazione essendo molto differente alle due estremità, ed essendo la fase separata di circa 180°. Anche in questo caso la correzione deve avvenire su due o più piani.
7.2.4 Sbilanciamento dinamico
Lo sbilanciamento dinamico, mostrato in figura 7.7, è definito come la condizione di sbilanciamento per cui l’asse di rotazione reale non coincide o tocca quello ideale.
Figura 7.7: Sbilanciamento dinamico (McMillan, 2004).
Lo sbilanciamento dinamico, nella maggioranza dei casi, esibisce alle estremità ampiezze della vibrazione differenti ed angoli di fase diversi fra loro.
162
Questo tipo di sbilanciamento deve essere corretto su due o più piani.
7.3 Principi operativi e classificazione delle macchine equilibratrici
Ogni macchina equilibratrice deve determinare, attraverso qualche tecnica, sia la grandezza della massa correttiva sia la sua posizione angolare in ciascuno dei piani di correzione selezionati. Per un’equilibratura a singolo piano questo può essere fatto staticamente, ma per equilibrature a due o più piani questo può essere fatto solo mentre il rotore sta girando. Tutte le macchine, infine, devono essere capaci di trasformare le letture dello sbilanciamento, normalmente prese ai cuscinetti, nelle equivalenti correzioni in ogni piano.
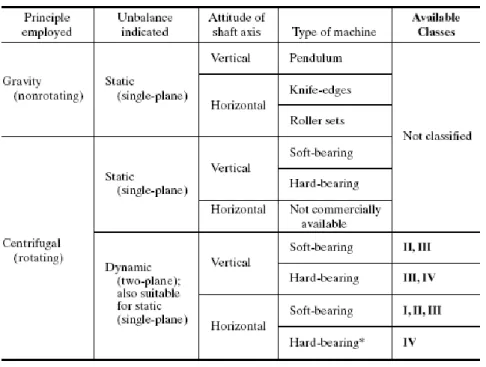
Sulla base dei loro metodi operativi, le macchine equilibratrici possono essere raggruppate in due categorie generali:
1. macchine equilibratrici per gravità: il vantaggio è dato dal fatto che un corpo libero di ruotare cerca sempre la posizione in cui il centro di gravità è più in basso possibile. Questo tipo di macchine includono sia i modi orizzontali (coltelli o rulli) sia i modi verticali (pendolo) e sono tutte capaci di rilevare e/o indicare solo lo sbilanciamento statico;
2. macchine equilibratrici centrifughe: questo tipo di macchine sono normalmente capaci di rilevare qualsiasi tipo di sbilanciamento, e possono essere classificate o per il tipo di sbilanciamento che la macchina è capace di individuare (statico o dinamico), o per l’orientamento dell’asse della macchina (orizzontale o verticale) o dal tipo di cuscinetto di supporto impiegato (morbido o duro).
Le macchine equilibratrici centrifughe possono anche essere suddivise, a sua volta, in quattro classi:
- Classe I: Macchine equilibratrici “prova-ed-errore” (trial-and-erro”).
Le macchine in questa classe sono del tipo a cuscinetti morbidi. Esse non indicano lo sbilanciamento direttamente in grammi, ma indicano solo spostamenti e/o velocità di vibrazione sui cuscinetti. Inoltre la strumentazione non mostra la quantità di materiale che deve essere aggiunta o rimossa, e l’equilibratura comporta una lunga procedura di prove ed errori per ogni rotore. Infine lo sbilanciamento non può essere risolto per piani di correzione specificati, poiché queste macchine non utilizzano la configurazione “piano di separazione” (plane separation), che consiste nel bilanciare il rotore eliminando lo squilibrio su un piano alla volta.
163
- Classe II: Macchine equilibratrici calibrabili richiedenti un rotore calibrato come prototipo.
Le macchine di questa classe sono del tipo a cuscinetti morbidi, usanti una strumentazione che permette la configurazione “piano di separazione” e la calibrazione di un rotore, dato un prototipo bilanciato. Comunque la stessa procedura di prove ed errori è richiesta per il primo rotore di una serie.
- Classe III: Macchine equilibratrici calibrabili non richiedenti un rotore equilibrato come prototipo.
Le macchine di questa classe sono del tipo a cuscinetti morbidi. Qualsiasi rotore non bilanciato può essere usato al posto di un rotore prototipo. In genere la configurazione “piano di separazione” e la calibrazione pussono essere raggiunte mediante l’aiuto di pesi calibrati, attaccati temporaneamente in ognuno dei due piani di correzione.
- Classe IV: Macchine equilibratrici calibrate permanentemente.
Le macchine di questa classe sono del tipo a cuscinetti duri. Esse sono calibrate permanentemente dal costruttore, per tutti i rotori che rientrano all’interno di un certo intervallo di velocità e peso. A differenza delle altre classi, queste macchine indicano lo sbilanciamento al primo funzionamento, senza dover calibrare il rotore singolarmente. La strumentazione della macchina indica, quindi, l’ampiezza e la posizione angolare del peso di correzione richiesto per ognuno dei due piani di correzione.
Una classificazione completa delle macchine equilibratrici è riportata nella figura seguente.
164
7.4 Tolleranze di equilibratura
Quando si effettua l’equilibratura di un elemento rotante è impossibile ottenere un bilanciamento perfetto, in quanto qualsiasi lavorazione comporta un certo grado di errore. Come è possibile, quindi, determinare quali tolleranze devono essere usate per equilibrare i vari tipi di rotore?
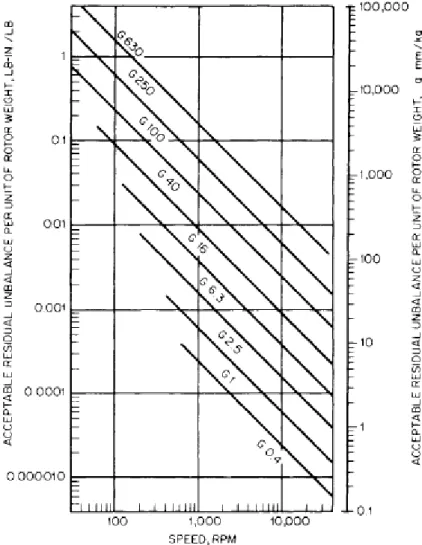
Per aiutare gli ingegneri a rispondere a questa domanda sono stati sviluppati vari standard, come ad esempio l’ISO 1940/1; la figura 7.9 fornisce lo sbilanciamento residuo ammissibile, cioè lo sbilanciamento massimo che può rimane dopo l’operazione di equilibratura, in funzione del grado di equilibratura G.
Figura 7.9: Sbilanciamento residuo ammissibile corrispondente a vari gradi di equilibratura G (Harris, 2002).
Il grado di equilibratura G, per rotori rigidi, è il prodotto dello sbilanciamento specifico per la velocità angolare del rotore alla massima velocità di esercizio, ed è costante per rotori dello stesso tipo.
165
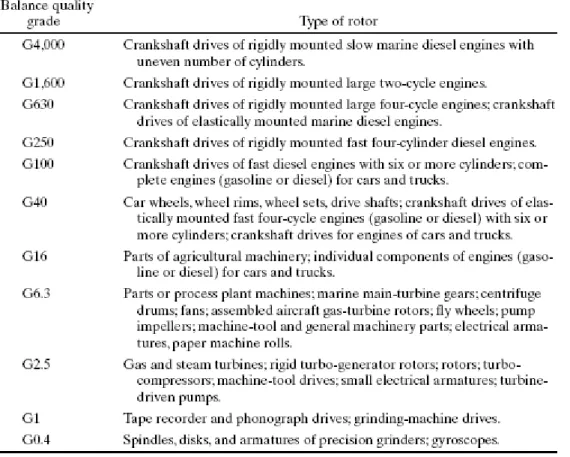
Il grado di equilibratura G, raccomandato, è basato sull’esperienza con vari tipi di rotore e per la sua scelta possiamo riferirci alla seguente tabella:
Tabella 7.1: Grado di equilibratura per vari gruppi di rotori rigidi (Harris, 2002).
7.5 Equilibratura degli induttori DAPAMITO3 e DAPAMITO4
Nell’ambito delle prove rotodinamiche si è reso necessario effettuare l’operazione di equilibratura sugli induttori utilizzati per la sperimentazione.
Grazie all’analisi della tabella 7.1 è stato scelto un grado di equilibratura G=2.5, cosa che permette di avere, nel peggiore dei casi (velocità massima di esercizio 3000 rpm), uno sbilanciamento residuo ammissibile pari a 10.8 g∙mm per il DAPAMITO3 e pari a 11.53 g∙mm per il DAPAMITO4, come è possibile verificare dalla figura 7.9. Sfruttando la modalità di rappresentazione dello sbilanciamento, può essere calcolata, in modo semplice e veloce, la forza centrifuga dovuta allo squilibrio rimasto dopo l’operazione di equilibratura.
166
Figura 7.10: Rappresentazione utilizzata per il calcolo della forza centrifuga.
Come è possibile osservare dalla figura precedente, infatti, la forza centrifuga può essere calcolata moltiplicando il valore dello sbilanciamento residuo ammissibile per la velocità di rotazione al quadrato. Prendendo, ad esempio, l’induttore DAPAMITO3 e utilizzando la massima velocità di esercizio di 3000 rpm, si ottiene una forza centrifuga pari a 1.07 N, che risulta molto inferiore alle forze rotodinamiche previste.
Inoltre è stato tenuto presente che i due induttori, destinati ad essere equilibrati, lavorano in acqua; questo comporta il fatto che il volume da asportare, durante l’operazione di equilibratura, deve essere aumentato di un fattore pari a 1.552, infatti:
dove sarebbe la massa da asportare nel caso in cui l’induttore girasse in aria, la densità dell’alluminio (materiale di cui sono fatti gli induttori) e il volume da asportare. Nel caso in cui l’induttore giri in acqua si ha:
dove è la densità dell’acqua e il volume da asportare.
Per ottenere il solito quantitativo di massa da asportare, quindi, deve risultare
In definitiva il volume da asportare nel caso in cui l’induttore giri in acqua risulta pari a:
Fc= m∙r∙ω2
167
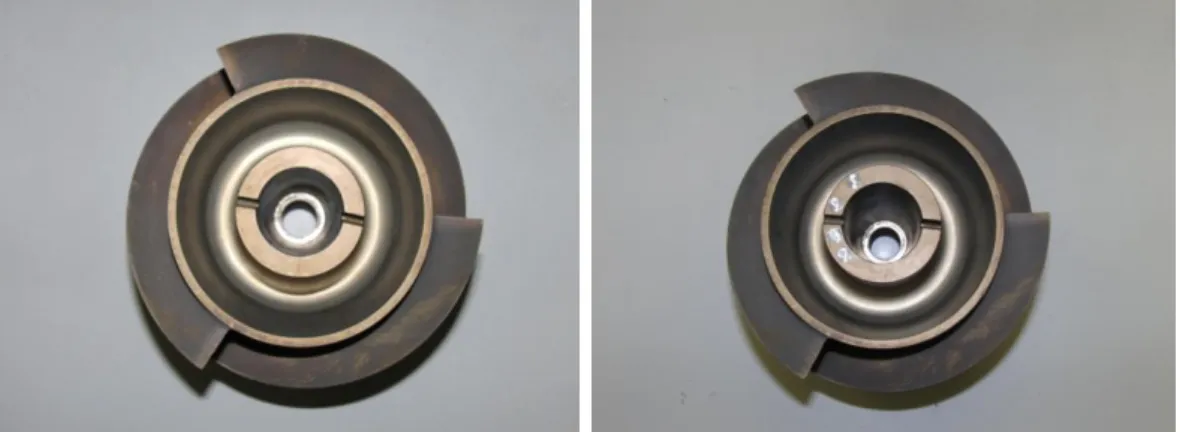
Inizialmente, poiché l’induttore DAPAMITO4 era impegnato in una campagna di prove, l’operazione di equilibratura ha riguardato solo la prolunga in acciaio da utilizzare nel montaggio “rotodinamico” e l’induttore DAPAMITO3, che si differenzia dal DAPAMITO4 per avere tre pale invece di quattro (vedi paragrafo 8.2). Sotto vengono riportate le foto dell’induttore e della prolunga prima e dopo l’operazione di equilibratura.
Figura 7.11: Vista frontale DAPAMITO3; A sinistra prima dell’equilibratura e a destra dopo.
Figura 7.12: Vista posteriore DAPAPITO3; A sinistra prima dell’equilibratura e a destra dopo. Come piani di correzione sono stati scelti, vedi figure 7.11 ed 7.12, il piano frontale ed il piano posteriore dell’induttore e l’asportazione di materiale è stata eseguita facendo dei fori di opportuna lunghezza in zone ritenute ininfluenti per il funzionamento dell’induttore stesso.
168
Figura 7.13: Vista frontale della prolunga dopo l’equilibratura.
Figura 7.14: Vista posteriore della prolunga; A sinistra prima dell’equilibratura e a destra dopo.
Così come per l’induttore, per l’equilibratura della prolunga, i piani correttivi scelti sono quello frontale e quello posteriore. Inoltre è possibile osservare in figura 7.14 la comparsa di un’ulteriore cava fatta realizzare durante l’operazione di equilibratura.
In seguito l’operazione di equilibratura è stata effettuata anche sull’induttore DAPAMITO4, come è possibile osservare nelle seguenti figure 7.15 e 7.16:
169
Figura 7.16: Vista posteriore DAPAPITO3; A sinistra prima dell’equilibratura e a destra dopo.
Anche in questo caso sono stati scelti il piano frontale ed il piano posteriore come piani di correzione.
170
7.6 Bibliografia
[1] “Balance Quality Requirements of Rotating Rigid Bodies”; Part 1, “Determination and Verification of Balance Tolerance”, ISO 1940-1, CD, 1998; Part 2, “Balance Errors”, ISO 1940-2, 1998
[2] “Balancing Vocabulary”, ISO 1925-1990; Amendment 1, 1995, Draft Amendment 2, 1999; Final Draft International Standard (FDIS) ISO 1925-2000
[3] C.M.Harris, A.G.Piersol, “Harris’Shock and Vibration Handbook”, McGraw-Hill, New York, 2002
[4] H.Josephs, R.L.Huston, “Dynamics of Mechanical Systems”, Crc Press, Boca Raton, pag. 513-537, 2002
[5] R.B.McMillan, “Rotating Machinery Practical Solutions to Unbalance and Misalignment”, The Fairmont Press, Lilbum, pag. 43-95, 2004
[6] A.Muszynska, “Rotordynamics”, Crc Press, Boca Raton, pag. 711-736, 2005 [7] D.Norfield, “Practical Balancing of rotating”, Elsevier, Oxford, 2006