Capitolo 6: Scheda di pilotaggio e acquisizione
Introduzione
Con il procedimento descritto nel capitolo precedente, è stato realizzato un tessuto sensorizzato di forma adatta ad essere sovrapposto ad una testa umana, artificiale o meno. I sensori ottenuti presentano una resistenza variabile, secondo degli stimoli esercitati, in un intervallo compreso tra 150KΩ e 180KΩ.
Su queste specifiche è stato progettata e costruita una scheda con alimentazione stabilizzata, garantita dagli integrati SG7812 e SG7912 per i componenti a 12V (TL084) e SG7805 e SG7905 per i componenti a 5V (MAX336 e AD623), in grado di pilotare correttamente i sensori ed acquisire il dato da essi proveniente.
6.1 Schema funzionale
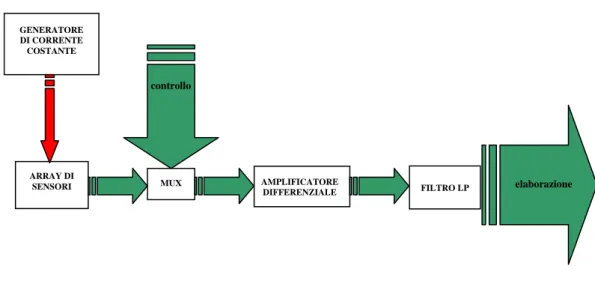
La scheda di pilotaggio ha la funzione di generare la corrente costante che scorre nella serie di sensori, di prelevare e filtrare la tensione dal sensore voluto tramite un amplificatore differenziale e successiva squadra RC; la commutazione tra i vari sensori è affidata a due multiplexers interposti tra i sensori e l’amplificatore.
In figura 6.2 sono rappresentati le strutture della scheda secondo le loro funzioni: ARRAY DI SENSORI MUX GENERATORE DI CORRENTE COSTANTE AMPLIFICATORE
DIFFERENZIALE FILTRO LP elaborazione
controllo
Figura 6.2: Schema a blocchi funzionali della scheda di pilotaggio
Il controllo e l’elaborazione sono rappresentati da frecce e non da blocchi poiché sono funzioni svolte esternamente alla scheda che si sta descrivendo. Il controllo consiste nell’indirizzamento dei multiplexers che selezionano il sensore da cui è prelevata la tensione; l’elaborazione indica la registrazione e il processamento delle tensioni acquisite.
6.1.1 Generatore di corrente costante
È stato usato lo schema di figura 4.3, l’amplificatore transconduttivo detto di Howland. Per la costruzione è stato impiegato l’amplificatore operazionale TL084, con i valori degli altri componenti riportati in figura 6.3:
Sistema di Sensori
I
Figura 6.3
l’array piezoresistivo, compreso tra 150 KΩ e 180KΩ. È comunque possibile regolare tensioni Vs minori in maniera da pilotare carichi maggiori, in
conseguenza del fatto che, diminuendo la corrente, l’operazionale satura per valori più grandi di resistenza. Il riferimento Vs è realizzato con un partitore resistivo
seguito da un buffer di tensione; così è possibile variare la corrente in un certo intervallo.
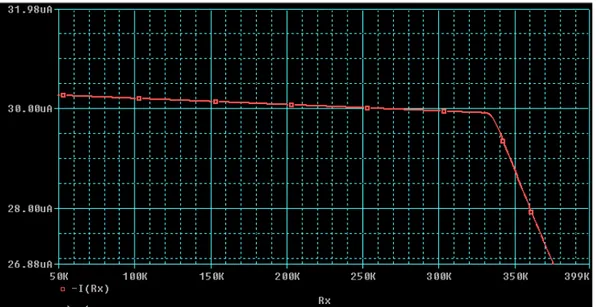
La simulazione con PSpice™ fornisce l’andamento grafico (figura 6.4) della corrente erogata al crescere della resistenza del carico:
Figura 6.4: Grafico della corrente in funzione del carico
In figura 6.4 è possibile notare la corrente I, circolante nei sensori, che si mantiene praticamente costante nell’intervallo di resistenze prima considerato. Il forte degrado delle prestazioni del generatore tranconduttivo coincide col limite approssimativo dei 330KΩ, sensibilmente diverso dal limite teorico a cause delle ipotesi semplificative assunte per lo studio del generatore di corrente.
L’ottima stabilità della corrente al variare della resistenza è stata confermata con prove sperimentali.
6.1.2 Multiplexers MAX336
Due mux MAX336 sono adoperati per scegliere da quale sensore prelevare la tensione. Essi sono a singolo canale d’uscita e sedici in ingresso, indirizzabili tramite quattro variabili gestite dalla scheda di controllo. Ognuno preleva la tensione da un terminale del sensore considerato e lo connette ad un polo dell’amplificatore differenziale; questo avviene sequenzialmente dal primo all’ultimo sensore. Il sistema non è parallelo, ma è comunque abbastanza veloce da garantire il funzionamento in tempo reale.
6.1.3 Amplificatore da strumentazione AD623
E’ stato scelto di utilizzare come amplificatore differenziale un amplificatore da strumentazione.
Questi dispositivi hanno:
• parametri noti con alta precisione • basso rumore
• ottima reiezione a modo comune
L’integrato AD623 è un amplificatore da strumentazione e presenta caratteristiche adatte all’applicazione richiesta, come l’alta impedenza di ingresso che permette di realizzare con ottima approssimazione il metodo delle quattro punte; l’AD623 preleva la tensione ai capi del sensore selezionato dai multiplexers e la rende disponibile per l’eventuale elaborazione e registrazione.
Il guadagno è facilmente regolabile tramite una resistenza RG connessa
agli appositi piedini; il piedino REF serve a dare all’AD623 una tensione a cui
riferire il valore dell’uscita, utile nel caso in cui siano presenti dinamiche molto ampie che potrebbere far saturare l’amplificatore da strumentazione (figura 6.5).
6.1.4 Filtro passa-basso RC
Il filtraggio è ottenuto da una squadra RC posta subito dopo l’amplificatore da strumentazione.
La frequenza scelta è di 100Hz, limite adatto a segnali provenienti dai movimenti del viso.
Usando la relazione: RC fp π 2 1 =
sono stati ricavati i valori:
R=1,6KΩ C=1µF
Il calcolo è stato effettuato imponendo nota la resistenza. Il valore scelto è dovuto alle specifiche del convertitore A/D del PIC16F877, componente usato nella scheda descritta al capitolo 9; i dettagli sono discussi nel paragrafo 9.2.