15
2.
MODELLO DELLA DINAMICA
DELL’ATTUATORE
Lo schema elettro-idraulico dell’attuatore oggetto di studio è illustrato in figura 2.1 [16]. L’attuatore in esame è un tandem nei quali il flusso idraulico, generato da due sistemi di alimentazione indipendenti, è regolato attraverso la rotazione dello spool della DDV a otto vie. La rotazione dello spool è ottenuta mediante un motore DC brushless a rotazione limitata (LABM) costituito da quattro bobine di comando.
Figura 2.1: schematizzazione dell’attuatore, [16]
Nel seguito sono richiamati brevemente i modelli fisico-matematici che governano il funzionamento dell’attuatore, che è stato descritto individuando tre sezioni:
- Sezione elettromeccanica - Sezione idraulica
- Sezione elettronica di controllo
LABM DDV rotante Attuatore Correnti (feedback) Correnti di comando RVDT LVDT
16
2.1. SEZIONE ELETTROMECCANICA
2.1.1.
Controllo PWM della corrente di bobina
Ogni bobina è controllata da una sezione elettronica indipendente. La tensioni ai capi della bobina è regolata con un controllo in ciclo chiuso sulla corrente mediante la tecnica del PWM (Pulse Width Modulation).
La modulazione di larghezza dell’impulso (PWM) è una modulazione analogica in cui l’informazione è codificata sottoforma di durata nel tempo di ciascun impulso di segnale. La durata di ciascun impulso può essere espressa in rapporto al periodo tra due impulsi successivi (duty cycle).
La modulazione dell’impulso è realizzata da una dinamica tristato: ai capi della bobina si impone una tensione pari a !"#$$%&, ' o (!"#$$%&. La tensione di alimentazione ai capi della bobina è fornita attraverso un ponte ad H (H-bridge) regolato attraverso quattro interruttori (switch) permettendo di ottenere diverse condizioni di stimolo (vedi figura 2.2): quando gli switch S1 e S4 sono chiusi (e quindi gli altri sono aperti), !)*+!"#$$%&; se S2 e S3 sono chiusi, la tensione è uguale ma di segno opposto
(!)*+,!"#$$%&); se S3 e S4 sono chiusi e gli altri due aperti, la tensione !)* è nulla. Esistono altri tre possibili combinazioni sugli interuttori che però non vengono usasti (vedi tabella 2.1).
17
State -./ -0/ -1/ -2/ 345
HIGH On Off Off On 367889:
ZERO Off Off On On 0
LOW Off On On Off ;367889:
Not used On On Off Off
-Not used On Off On Off
-Not used Off On Off On
-Tabella 2.1: logiche di funzionamento dell’H-bridge , [16]
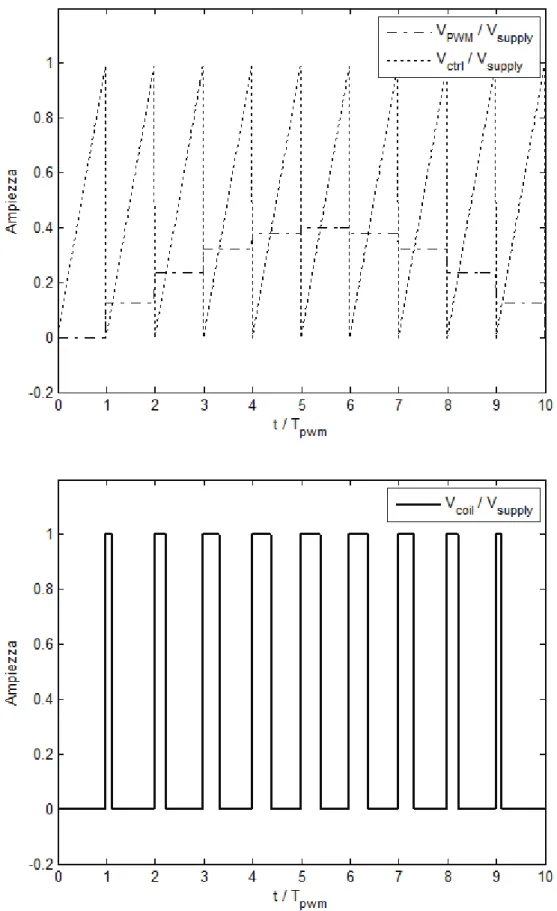
Lo stato dell’H-bridge è ottenuto confrontando il segnale di ingresso con un’onda a dente di sega avente una frequenza molto maggiore di quella di campionamento. Il periodo del segnale di controllo è indicato con <=>? e corrisponde al periodo di duty cycle del PWM. Se il valore assoluto dell’ampiezza del segnale di ingresso è minore dell’ampiezza del segnale di controllo, allora lo stato dell’H-bridge è ZERO, altrimenti lo stato è HIGH o LOW a seconda che il segnale di ingresso sia rispettivamente positivo o negativo (figura 2.4).
Figura 2.3: schema del funzionamento di PWM
PWM
CONTROL
@=>?
@ABCD @AEFD @GHIIDJ
3KLM
3NOP9
18
19
La dinamica di PWM viene simulata mediante un modello semplificato che riproduce il funzionamento base, trascurando aspetti di elettronica quali i circuiti per la stimolazione degli elettrodi dei gate.
Nel modello, la tensione di controllo è un segnale a dente di sega STUV di periodo <=>? moltiplicato per la tensione di alimentazione @GHIIDJ:
@ABCDTWV + @GHIIDJSTUV (2.1)
essendo:
STUV + XU <Y'=>? Z[ ' \ U \ <Z[ U + < =>?
=>? (2.2)
Una volta che la tensione @=>? entra nel modello, lo stato del ponte H-bridge viene definito applicando le (2.3) e si ricava la @AEFD tramite la tabella (2.1) delle porte logiche.
]U^U_ + ` a b a cdefd ghij kjl mmm no p!qrsp t !uvwxyz{ !qrs t ' nomp!qrsp | !uvwxmmmmmmmmmmmmmmmmmmmmmmmmmmmmm no p!qrsp t !uvwxyz{ !qrs \ ' (2.3)
Uno schema del funzionamento del PWM è rappresentato in figura 2.4.
2.1.2.
Motore DC brushless della servovalvola DDV
La movimentazione dello spool della valvola rotante è ottenuta mediante una coppia motrice <} generata da un motore DC brushless a rotazione limitata. Il motore è costituito da quattro bobine (coil) alimentate in corrente continua.
La configurazione del motore è illustrata nella figura 2.5a. Le bobine sono poste nello statore e sono montate radialmente rispetto al rotore; i quattro magneti permanenti sono invece posti nella parte rotorica e montati in direzione tangenziale al rotore.
20
Figura 2.5: (a) motore DDV; (b) linee di flusso sulla singola coppia bobina-magnete;
(c) orientamento dei flussi magnetici
Le ipotesi di base del modello di motore della DDV sono le seguenti: - il sistema è fault-tolerant con quattro bobine indipendenti
- in condizione normal-operative tre bobine sono attive ed una è in stand-by
- la generazione della coppia magnetomotrice è ripartita in maniera equa su ogni bobine attiva
- ogni bobina è controllata da una sezione elettronica separata - sono trascurati gli effetti di mutua induttanza tra le bobine Nella figura 2.5b sono riportate le linee di flusso magnetiche.
~AEFD G ~ ~ (a) (b) (c)
21
Il flusso magnetico correlato alla bobina è dato dalla somma delle componenti dei flussi lungo la direzione normale alla bobina: una componente è data dal flusso lungo l’asse diretto del magnete (~), l’altra dal flusso lungo l’asse di quadratura del magnete (~) (vedi figura 2.5c):
~AEFD + ~"nz G ~" G (2.4)
Il flusso magnetico correlato alla bobina del flusso nella bobina è: ~AEFD + AEFDZAEFD
"nz G " G } "nz G (2.5)
2.1.3.
Dinamica della corrente
L’equazione della dinamica della corrente nella bobina è:
@AEFD + AEFDZAEFD AEFD~UAEFD (2.6)
dove @AEFD e AEFD indicano rispettivamente la tensione ai capi della bobina regolata attraverso PWM e la resistenza della bobina stessa.
L’ultimo termine della (2.3) può essere scritto come ~AEFD
U +~ZAEFDAEFD
ZAEFD
U ~AEFDG
G
U (2.7)
da cui, riscrivendo l’equazione (2.3), si ottiene:
@AEFD + AEFDZAEFD AEFDTGV ZU AEFD BTZAEFD GV UG (2.8)
Il termine AEFD rappresenta l’induttanza della bobina ed il termine B rappresenta il coefficiente della forza elettromotrice della bobina ed in forma estesa diventano:
AEFDTGV + AEFD~ZAEFD AEFD + AEFD "nz G " G (2.9)
BTZAEFD GV + AEFD~AEFD G + AEFD} " G AEFD Z AEFD ; "nz G (2.10)
22
2.1.4.
Dinamica del moto dello spool
La coppia generata dalla bobina sullo spool è ottenuta mediante bilancio di potenza:
F + FGG }AA (2.11)
La potenza elettrica generata dalla bobina si converte in potenza dissipata per effetto Joule, in potenza induttiva e in potenza meccanica. Infatti moltiplicando l’equazione (2.5) per ZAEFD si può scrivere come:
@AEFDZAEFD + AEFDZAEFD
AEFDZU ZAEFD AEFD BZAEFDUG (2.12)
La coppia generata dalla bobina in funzione di G e di ZAEFD è: <} + BZAEFD + AEFD} " GZAEFD AEFD ; "nz GZAEFD (2.13)
L’equazione del moto dello spool è:
GG + <} <CFABFE <DE <G (2.14) dove
- G è il momento d’inerzia dello spool - <CFABFE è la coppia di attrito
- <DE è la coppia delle forze di flusso
- <G è la coppia generata dal case a fine corsa
Modello di attrito
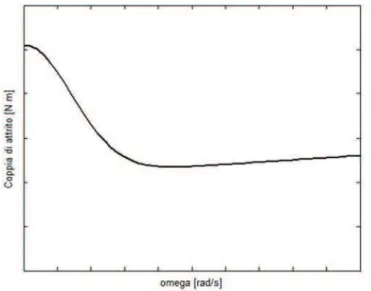
La modellazione degli attriti viene descritta mediante una curva di Stribeck, che tiene conto dei seguenti contributi:
- attrito statico - attrito coulombiano - attrito viscoso
Quando il corpo accenna a muoversi, l’entità della coppia di attrito è elevata (attrito statico). Pian piano che la velocità del corpo aumenta, la forza di attrito invece
23
diminuisce fino ad un valore costante (attrito coulombiano). C’è poi da considerare una componente di attrito viscoso che aumenta all’aumentare della velocità.
La tipica forma ad “L” della curva di Stribeck è rappresentata in figura 2.6.
Figura 2.6: curva di Stribeck
L’andamento della curva di Stribeck che rappresenta la variazione di valore di attrito statico ad attrito coulombiano è descritta mediante una curva gaussiana.
L’espressione della coppia di attrito è:
<CFABFE + ;p<p "z G ; p<; <p $ ; G
G
¡ "z G ; ¢GG (2.15)
dove < è la coppia di attrito statica, < è la coppia di attrito coulombiano, G un parametro di riferimento per la velocità di strisciamento e ¢G il parametro che tiene conto dell’azione viscosa.
24 Forze di flusso
L’efflusso di fluido attraverso le luci di trafilamento ed il passaggio di fluido nelle camere della servovalvola generano delle forze che agiscono direttamente sullo spool: in letteratura vengono chiamate forze di flusso.
Il contributo Z ;esimo della coppia generata dalla forza di flusso può essere espressa mediante la seguente relazione:
<DEmF + T;VF £¤F
¥A¦F§G" ¨F (2.16)
La somma totale dei contributi fornisce il valore complessivo della coppia di forze di flusso:
<DE + © <DE F
ª F«¬
(2.17)
Nel caso si studi il modello di DDV isolata, la coppia di flusso <DE non compare nel bilancio di quantità di moto.
Forze di fondo corsa
Il case della servovalvola, nel caso in cui sia G t Gm}® o G \ Gm}F (poiché Gm}® + Gm}F si può anche scrivere pGp t Gm}®), esercita una coppia definita di
fondo corsa mediante una serie di elementi molla-smorzatore. La rigidezza e lo smorzamento dei due elementi sono G e ¢G. La coppia risulta quindi essere:
<G + ¯
' mmmmmmmmmmmmmmmmmmmmmmm °_§ pGp \ Gm}®
;G±G; Gm}®"z G² ; ¢GG °_§ pGp \ Gm}®
25
2.2.
SEZIONE IDRAULICA
2.2.1.
Flusso idraulico attraverso la DDV
L’efflusso di portata nella servovalvola è ottenuto caratterizzando le luci di trafilamento. Lo schema della disposizione delle vie nella servovalvola per unità idraulica è rappresentato in figura 2.7.
Figura 2.7: schema delle vie della servovalvola, [16]
essendo:
- !: la pressione di mandata - ": la pressione di ritorno
- #: la pressione nella camera $ dell’attuatore - %: la pressione nella camera b dell’attuatore Le portate di fluido sono quindi:
&# ' &() &*+ &,) &
-(2.19) &% ' &.) &/+ &0) &1
È importante notare dalla figura 2.7 come vi sia una simmetria radiale nella geometria della servovalvola. Le portate di fluido attraverso le luci di trafilamento vengono calcolate mediante le seguenti relazioni:
! " " ! # % % #
26 &( ' &, ' 2(34 !) #45678 !) #9 (2.20) &* ' &- ' 2*34 #) "45678 #) "9 &/ ' &1 ' 2/34 %) "45678 %) "9 &. ' &0 ' 2.34 !) %45678 !) %9
essendo 2: il coefficiente di trafilamento per l’orifizio relativo alla ;-esima via:
2: ' <=>?@ A: (2.21)
dove @ è la densità del fluido, <= il coefficiente di scarica e A: la generica sezione ;-esima dell’orifizio.
Si considera un regime di flusso turbolento attraverso l’orifizio, onde per cui il coefficiente di scarica risulta costante. Pertanto le espressioni del coefficiente di trafilamento dipendono esclusivamente dalla generica sezione dell’orifizio.
A causa della simmetria radiale, per una rotazione B! positiva dello spool della DDV, le luci di area A( e AC si aprono, mentre le luci di area A? e AD si chiudono. Le luci sono pertanto funzione di B! ed in particolare del prodotto del raggio dello spool E! per B! (F! ' B!GE!). Si indica con H l’altezza della sezione dell’orifizio, con I" il gioco radiale tra spool e la parte statorica della DDV (sleeve) e con J il ricoprimento negativo (underlap) che si ha quando il cassetto di distribuzione è in posizione centrata. Le aree degli orifizi sono descritte dalle seguenti relazioni:
A( ' A/ ' A# ' KH IH 3E" B! L BM !*8B!+ BM9*+ I"* B! N BM
(2.22) A* ' A. ' A% ' KH IH 3E" B! N BM
!*8B! + BM9*+ I"* B! L BM
È importante precisare che anche quando lo spool è in posizione centrata la generica luce di trafilamento non risulta completamente chiusa, motivo per cui si ha sempre un flusso di fluido idraulico (leakage flow).
27
Figura 2.8: dettaglio della geometria dell’orifizio
Forze di flusso
L’efflusso di fluido attraverso le luci di trafilamento ed il passaggio di fluido nelle camere della servovalvola generano delle forze che agiscono direttamente sullo spool: in letteratura vengono chiamate forze di flusso.
La componente stazionaria delle forze di flusso, che è quella che riveste importanza ai fini dell’analisi dei trafilamenti, è inclinata di un angolo O rispetto all’orizzontale; essa può quindi essere scomposta in due componenti: una ortogonale all’asse dello spool, mentre l’altra tangente alla circonferenza dello stesso.
L’angolo O è detto jet angle (o angolo di deviazione del getto) ed è definito come l’angolo acuto compreso tra la direzione del getto e la retta tangente allo sleeve; sotto l’ipotesi di fluido irrotazionale, non viscoso ed incompressibile dipende dalla apertura assiale della luce e dal gioco radiale secondo la seguente relazione (nota dalla letteratura) [11]:
E!P8)Q9:B!) BMR
I" ' )Q + ST? 5U7 OQ + ST? [\5 O::) V7 WXY78ST? ) O+ V7 WXY78STD ) O::T?9Z [\5 OT?9Z 5U7 O:: (2.23) O( ' O/ ' O, ' O1 ' O#
(2.24) O* ' O. ' O- ' O0 ' O%
28
2.2.2.
Dinamica delle pressioni
La dinamica delle pressioni nelle camere dell’attuatore è descritta applicando il bilancio di massa per ciascuna delle quattro camere dell’attuatore tandem:
&#) &]# ) &^"_!! ' A^#F`a+bc ^# #`
(2.25) &%) &]% + &^"_!! ' )A^%F`a+bc ^% `%
dove &# e &% indicano le portate di flusso dalla DDV alle camere di sezione A^# e A^% e volume b^# e b^%, &^"_!! indica le perdite di flusso tra le due camere, &]# e &]% sono le perdite di flusso con l’esterno, c è il bulk modulus del fluido e F`a la posizione del pistone.
Trascurando i termini che introducono delle perdite di flusso nell’attuatore, le equazioni (2.21) diventano: `# 'bc ^#8&#) A^#F`a9 (2.26) `% 'bc ^%8&%+ A^%F`a9
2.2.3.
Dinamica del moto del pistone
In figura 2.9 è illustrato lo schema dell’attuatore idraulico tandem.
Figura 2.9: martinetto idraulico tandem
#( %( #* %*
Camera a1 Camera b1 Camera a2 Camera b2
Fa
Fa d#e
fgeh
29 L’equazione del moto di un attuatore tandem è:
ijFkj ' $QAI$Q) lQAIlQ+ $?AI$?) l?AIl?+ fmFn+ foE;In;pq+ fmr (2.27)
dove
- ia è la massa del pistone
- fgeh è la forza esterna applicata al pistone - fs":^h:_t è la forza di attrito
- fg! è la forza generata dal case dell’attuatore a fine corsa
L’equazione della dinamica del moto del pistone è stata scritta sotto l’ipotesi che: - i supporti dell’attuatore siano infinitamente rigidi
- il collegamento tra i pistoni delle due camere sia infinitamente rigido
Modello di attrito
La modellazione degli attriti viene descritta attraverso un modello di attrito coulombiano:
fs":^h:_t ' )4f!4 567 F`a (2.28)
Una modellazione migliore sarà realizzata quando saranno note maggiori informazioni sul comportamento dinamico dell’attuatore.
Forza di fondo corsa
Nel caso in cui Fa u FaGd#e o Fav FaGd:t (poiché FaGd#e ' FaGd:t si può anche scrivere wFaw u FaGd#e) il case esercita una forza di fine corsa mediante una coppia di elementi molla-smorzatore. La rigidezza e lo smorzamento dei due elementi sono 2"Gg! e x"Gg!. La coppia risulta quindi essere:
fg! ' y
zGGGG GGGGGGGGGGGGGGGGGGGGGGGG jmE wFaw v FaGd#e )2" g!PFa) FaGd#e567 FaR ) x" g!F`a jmE wFaw v FaGd#e
30
2.3.
SEZIONE ELETTRONICA DI CONTROLLO
2.3.1.
Trasduttori ad induzione (LVDT e RVDT)
Il trasduttore di spostamento è un dispositivo elettromagnetico usato per la misura di piccoli spostamenti. La spostamento è ottenuto elaborando la tensione d'uscita ai capi dei secondari indotta dalla tensione ai capi del primario.
Per la misura della rotazione dello spool della servovalvola, si utilizza un trasduttore ad induttanza RVDT (Rotary Variable Differential Transformer). Per la misura della posizione del martinetto si utilizza un LVDT (Linear Variable Differential Transformer). Il funzionamento di entrambi è molto simile.
La geometria dei trasduttori RVDT è rappresentata in figura 2.10:
Figura 2.10: trasduttore RVDT: (a) sezione; (b) schema dei circuiti, [16]
Nei trasduttori di posizione, le tensioni ai capi dei secondari sono: b# ' 2!gt!G8{!gt!+ |!94b:t4 5U7 8?So:tn9
(2.30) b% ' 2!gt!G8{!gt!) |!94b:t4 5U7 8?So:tn + }9
31
- 2!gt!: il coefficiente di accoppiamento del sensoreG - {!gt!: la posizione di mezzeria del sensoreG
- |!: lo spostamento del trasduttoreG - b:t~ la tesione ai capi del primarioG
- o:t: la frequenza della tensione in ingressoG - }: il ritardo di fase tra i due secondariG
Le tensioni elaborate dai trasduttori sono processate dai controlli elettronici per fornire il raziometrico (!gt!). Il segnale raziometrico fornisce una misura che dipende solamente dalle caratteristiche geometriche del sensore e che invece è indipendente da qualsiasi altra variabile (2!gt! b:t,…).
Infatti il raziometrico viene definito come: !gt! b#
"d!) b %"d!
b#"d!+ b%"d! (2.31)
Con il termine RMS (root mean square) si indica il valore efficace (anche detto valore quadratico medio) di una grandezza.
G
2.3.2.
Controllo dell’attuatore mediante scheda FPGA
L’implementazione del controllo nell’FCC avviene mediante una Field Programmable Gate Array (FPGA). L’FPGA è un circuito integrato digitale la cui funzionalità è programmabile via software. La possibilità di programmazione dell’FPGA nell’FCC è fornita attraverso una serie di filtri atomici nel discreto, aventi la seguente funzione di trasferimento (FdT) [15]:
' (+ *
(+ //
Q + A**+ A//
dove G è il guadagno e ( * / A*GmGA/ sono i coefficienti della FdT. Questi parametri possono essere modificati manualmente dall’utente ad ogni accensione dell’FCC. La modifica dei filtri atomici provoca il cambiamento del sistema di controllo e quindi la risposta dinamica del sistema. È necessario convertire le funzioni di trasferimento dei controllori dal continuo al discreto attraverso una trasformazione bilineare o metodo di Tustin, per la quale:
32 r ' ?
!#da]g
) Q + Q
. Naturalmente la modifica dei filtri atomici provoca il cambiamento del sistema di controllo e quindi la risposta dinamica del sistema.
Nella figura 2.11 è rappresentato lo schema della logica di controllo per l’attuatore. Il controllo dell’attuatore è realizzato da tre controlli in ciclo chiuso, rispettivamente su:
- la corrente delle bobine - la rotazione della DDV - la posizione del pistone
Figura 2.11: logica di controllo del sistema
2.4.
FAILURE ELETTRICHE ED IDRAULICHE
Nel seguito sono descritte alcune delle modalità di failure che possono avvenire nel sistema. Considerare le tipologie di guasto vuol dire conoscere i possibili effetti che essi hanno sull’attuatore e di conseguenza sulla risposta dinamica.
+ - + - + -
33
2.4.1.
Failure elettriche
Nello studio della dinamica dell’attuatore sono state considerate due possibile avarie elettriche:
- circuito aperto della bobina (open circuit, OC) - cortocircuito della bobina (short circuit, SC)
Un circuito aperto è definito come un collegamento fra due punti di un circuito che ha resistenza infinita; in caso di circuito aperto la corrente che circola nella bobina è nulla e la tensione ai capi può assumere valori arbitrari. Il simbolo di circuito aperto è raffigurato in figura 2.12a.
Un cortocircuito è definito come un collegamento fra due punti di un circuito che ha resistenza nulla; il cortocircuito impone una tensione nulla ai capi della bobina e non impone vincoli sulla corrente che circola, la quale può assumere valori molto elevati. Il simbolo di cortocircuito è raffigurato in figura 2.12b.
Figura 2.12: simbolo del bipolo: (a) circuito aperto; (b) cortocircuito
2.4.2.
Failure idrauliche
Si ipotizza che a monte della servovalvola vi sia una valvola di by-pass che in caso di avaria cortocircuita il sistema. In caso di malfunzionamento dell’impianto idraulico si attiva una valvola di bypass che stacca l’impianto dell’attuatore e collega i capi delle due linee. La differenza di pressione ai due capi diventa pari al salto di pressione attraverso l’orifizio della valvola di by-pass.
b^_:]' z ;^_:] 8l9 b^_:] ;^_:]' z 8$9
34
Figura 2.13: valvole di by-pass
2.5.
IMPLEMENTAZIONE SU PIATTAFORMA
MATLAB/SIMULINK
Il modello viene implementato su piattaforma Matlab/Simulink, come illustrato in appendice B.
Il modello è stato sviluppato cercando di mantenere inalterata la struttura dell’attuatore e la sua fisica. Pertanto sono state realizzate quattro linee di comando relative al numero di bobine e altrettante linee di feedback. Risulta quindi possibile intervenire su ciascuna linea inserendo blocchi di rumore sui segnali di trasduzione ed è possibile riprodurre eventuali avarie elettriche su ciascuna bobina.
Valvole di by-pass
35
Figura 2.14: particolare di implementazione delle linee di comando
La stessa modalità di implementazione è stata effettuata per riprodurre l’impianto idraulico. Sono stati quindi considerati due sistemi di alimentazione idraulica indipendenti per i quali è possibile riprodurre perdite di pressione.
Figura 2.15: particolare di implementazione del sistema idraulico B!
#( %( %* #*
s]_
B!
36
2.5.1.
Demodulazione dei segnali
I valori di tensione dei secondari dei trasduttori sono demodulati e filtrati. Al termine del processo di demodulazione si ottiene il valore della posizione per la DDV ed il pistone.
Figura 2.16: schema della dinamica di demodulazione per LVDT
2.5.2.
Riproduzione rumore
Il rumore presente sugli LVDT e sugli RVDT è riprodotto mediante appositi blocchi e sovrapposto al segnale di uscita demodulato. Per una descrizione più dettagliata della caratterizzazione del rumore si rimanda al capitolo 3.2.2.
Filtro DDV
Filtro ROD
37
Figura 2.17: riproduzione rumore sui segnali dei trasduttori
2.5.3.
Simulazione failure elettrica
Nel modello sono state riprodotte le due possibili modalità di failure: - circuito aperto della bobina (open circuit, OC)
- cortocircuito della bobina (short circuit, SC)
Questi due tipi di failure sono riprodotti rispettivamente imponendo che la corrente sulla bobina sia nulla e imponendo che la tensione della bobina sia nulla.
;^_:] ' z
(2.32) b^_:] ' z
La simulazione di failure è implementata mediante degli operatori booleani. Il modello tiene conto che il principio base del motore DDV è la sua ridondanza: nella condizione normal-operative solo tre delle quattro bobine sono attive, mentre la quarta è in stand-by. In caso di avaria delle tre bobine, la quarta viene attivata.
38
Figura 2.18: schema di assegnazione della failure elettrica
Le due possibili modalità di avaria elettrica (OP e SC) sono così simulate:
Figura 2.19: modalità di avaria elettrica: (a) short circuit; (b) open circuit
39
2.5.4.
Simulazione failure idraulica
Nel modello è stata riprodotta la possibilità di guasto idraulico. Si ipotizza che a monte della servovalvola vi sia una valvola di bypass che in caso di avaria cortocircuita il sistema. Ciascun impianto idraulico è costituito da una linea di mandata e da una linea di ritorno attraverso i quali scorre il fluido. In caso di malfunzionamento dell’impianto idraulico si attiva una valvola di by-pass che stacca l’impianto dall’attuatore e collega i capi delle due linee. La differenza di pressione ai due capi diventa pari al salto di pressione sulla valvola di by-pass. Il modello impone che le due pressioni siano uguali trascurando quindi gli effetti di perdita di pressione attraverso l’orifizio della valvola.
40 La modalità di avaria idraulica è così simulata:
![Figura 2.1 : schematizzazione dell’attuatore, [16]](https://thumb-eu.123doks.com/thumbv2/123dokorg/7532484.107214/1.892.156.840.564.909/figura-schematizzazione-dell-attuatore.webp)
![Figura 2.2 : schema dell’H-bridge, [16]](https://thumb-eu.123doks.com/thumbv2/123dokorg/7532484.107214/2.892.308.635.789.1077/figura-schema-dell-h-bridge.webp)
![Tabella 2.1: logiche di funzionamento dell’H-bridge , [16]](https://thumb-eu.123doks.com/thumbv2/123dokorg/7532484.107214/3.892.142.800.162.386/tabella-logiche-funzionamento-h-bridge.webp)
![Figura 2.7 : schema delle vie della servovalvola, [16]](https://thumb-eu.123doks.com/thumbv2/123dokorg/7532484.107214/11.892.296.642.362.665/figura-schema-vie-servovalvola.webp)


![Figura 2.10 : trasduttore RVDT: (a) sezione; (b) schema dei circuiti, [16]](https://thumb-eu.123doks.com/thumbv2/123dokorg/7532484.107214/16.892.223.781.562.869/figura-trasduttore-rvdt-sezione-b-schema-circuiti.webp)
