1. Introduzione
In questi ultimi anni le trasmissioni a variazione continua del rapporto (CVT) si sono ampiamente diffuse nel campo della trazione, con applicazioni in macchine agricole, automobili e soprattutto nei motorscooter, dove ormai si sono raggiunte cilindrate superiori ai 500 cc.. Lo schema costruttivo comunemente utilizzato in tali applicazioni è costituito da due pulegge espandibili in modo tale da variare il proprio diametro d’avvolgimento, e da una cinghia a sezione trapezoidale. Il controllo della cambiata è affidato ad un regolatore centrifugo per la puleggia motrice, calettata sull’albero motore, e ad un correttore di coppia montato sulla puleggia condotta.
Nello sviluppo e progetto del CVT, particolare importanza riveste la verifica della cinghia, normalmente basata sulle indicazioni riportate sui manuali dei produttori, i quali forniscono un semplice ed efficace schema di calcolo delle principali sollecitazioni cui è sottoposta. Tra queste la pressione media sui fianchi della cinghia nell’arco di contatto, da investigazioni sperimentali, è risultata pressoché inversamente proporzionale alla sua durata. La pressione media costituisce quindi un parametro importante per stimare la vita della cinghia.
Tuttavia tali schemi semplificati spesso non riescono a determinare con soddisfacente accuratezza le effettive sollecitazioni sugli organi di trasmissione; per ottenere delle previsioni più affidabili occorre quasi sempre affidarsi anche in fase di progettazione di massima a modelli multibody, che sono in grado di riprodurre con precisione l’andamento delle sollecitazioni a prezzo però di una accuratezza nei dati in ingresso che difficilmente è possibile garantire in fase di primo dimensionamento.
Nasce dunque l’esigenza di disporre di uno strumento più flessibile, in grado tuttavia di mettere in evidenza gli aspetti salienti del fenomeno in esame.
Il presente lavoro di tesi, svolto in collaborazione con Piaggio & C. SpA, è finalizzato alla costruzione di un modello a parametri concentrati di CVT in grado di stimare con buona accuratezza i carichi dinamici e lo stato di sollecitazione cui la cinghia è sottoposta, e di fornire informazioni sull’andamento della pressione sui fianchi nell’arco di contatto, durante l’esercizio della trasmissione ad un determinato rapporto (stazionario) di velocità.
È stato inoltre approntato un secondo modello in grado di analizzare la fase di assestamento della cinghia subito dopo il montaggio con pretensionamento sulle pulegge.
Entrambi i modelli messi a punto sono stati impiegati per l’analisi delle trasmissioni CVT montate sui motori Piaggio 200 cc e 500 cc e i risultati ottenuti sono stati validati attraverso un
confronto con quelli forniti da un modello realizzato in ambiente multibody Adams® in un precedente lavoro di tesi; sono stati effettuati inoltre confronti con i modelli teorici noti in letteratura per stimare le perdite nella trasmissione.
Tutte le simulazioni sono state condotte in ambiente software Simulink® 5.0, un tool applicativo del pacchetto Matlab® 6.5.
2. Stato delle conoscenze di partenza
Nell’ambito della ricerca sulle trasmissioni a cinghia trapezoidale, G. Gerbert [1] ha sviluppato un modello analitico in grado di rappresentare in maniera sufficientemente rigorosa l’andamento della pressione sui fianchi della cinghia nell’arco di contatto, pur trascurando l’effetto delle forze d’inerzia e della rigidezza flessionale della cinghia. La trattazione, tuttavia, richiede la risoluzione di un complicato sistema d’equazioni differenziali, e la difficile attribuzione di condizioni iniziali, da cui le soluzioni dipendono fortemente.
Molti sono i lavori incentrati invece sulla modellazione a parametri concentrati o FEM dell’insieme cinghia-puleggia.
Per quanto riguarda il primo ambito C. Barker [2] propone un semplice modello in cui i rami rettilinei della cinghia e quelli a contatto con le pulegge sono schematizzati da singole molle concentrate, includendo nel modello gli effetti inerziali della rotazione e simulando una fase di repentina accelerazione della puleggia motrice. A. Harrison [3] studia invece l’incremento di tensione dal ramo lento al ramo teso della cinghia suddividendo l’arco di contatto in segmenti connessi tra loro da elementi viscoelastici; i risultati confermano un andamento crescente delle tensioni secondo il classico andamento esponenziale previsto dalle relazioni teoriche e una forte dipendenza delle tensioni nei rami dal valore del coefficiente di attrito tra cinghia e puleggia.
Un modello FEM della trasmissione è stato elaborato da M. J. Leamy [4], [5] in cui si evidenzia in particolare il fatto che in ingresso e in uscita dalle pulegge l’andamento delle pressioni normali sul fianco presenta dei picchi legati all’inerzia degli elementi e dovuti al repentino cambio delle condizioni di moto degli stessi.
In generale, tutti gli autori concordano sull’influenza esercitata dai principali parametri sul rendimento della trasmissione, tra i più importanti dei quali si citano la pretensione della cinghia, il raggio d’avvolgimento, la coppia trasmessa e il coefficiente di attrito.
3. Modellazione a parametri concentrati della trasmissione CVT
La realizzazione di un modello a parametri concentrati prevede in linea generale la sostituzione delle caratteristiche di un corpo continuo, dotato di proprietà inerziali, elastiche e viscose distribuite, con una serie di elementi aventi masse, rigidezze e smorzamenti concentrati in punti ben definiti.
Nel presente lavoro di tesi si è proceduto in questa direzione, avvalendosi di alcune ipotesi semplificative, al fine di evidenziare gli aspetti che hanno una influenza decisiva sul ciclo di carico cui è sottoposta la cinghia. Il modello sviluppato è bidimensionale ed contenuto nel piano di simmetria longitudinale della trasmissione. Si è scelto inoltre di trascurare gli slittamenti macroscopici tra cinghia e pulegge [3]; ciò non impedisce che localmente si abbiano microscorrimenti dovuti all’elasticità della cinghia. Tutti gli elementi elastici sono stati considerati lineari, mentre le rigidezze degli elementi viscosi sono legate a quelle degli elementi elastici tramite il fattore di smorzamento D (smorzamento proporzionale). Infine è stata trascurata l’influenza del momento d’inerzia flessionale della cinghia [3].
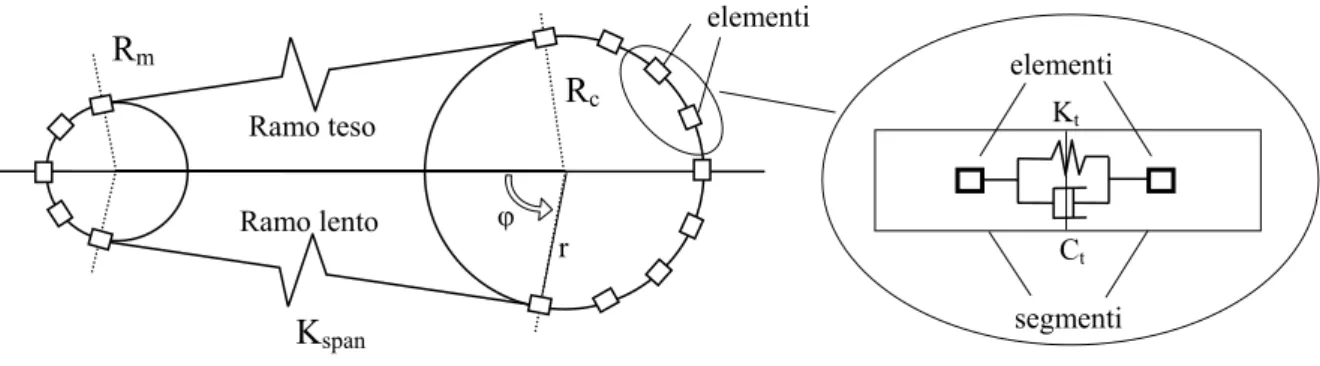
La modellazione è stata effettuata suddividendo innanzitutto la parte di cinghia a contatto con le pulegge in elementi dotati di massa e connessi tra loro da molle e smorzatori di costante opportuna, agenti nella direzione longitudinale della stessa come mostrato in figura 1.
Rc Ct segmenti elementi elementi Kt Rm Ramo lento r φ Ramo teso Kspan
Fig. 1 Schema degli elementi e delle connessioni elastiche e smorzanti
Ogni elemento possiede due gradi di libertà, uno in direzione tangenziale ed uno in direzione radiale; i due rami rettilinei della trasmissione sono sostituiti da due elementi viscoelastici di costante opportuna che collegano gli elementi di ingresso e di uscita delle rispettive pulegge. Dato che la cinghia reale non è omogenea e non ha sezione costante a causa della presenza di una dentellatura inferiore, si è provveduto a costruire una cinghia ad essa equivalente, di sezione e caratteristiche elastiche costanti; le costanti equivalenti sono state ottenute tramite analisi agli EF.
puleggia e fianchi della cinghia è stata attribuita a quest’ultima.
La valutazione delle forze di contatto che nascono sui fianchi della cinghia avviene attraverso una funzione non lineare del tipo
p C p K F l e l ⋅ + ⋅ & = (1)
dove p è la penetrazione fittizia tra le superfici in contatto, mentre Kl, Cl ed e sono parametri da introdurre nel modello e caratteristici dei corpi a contatto. L’attrito è di tipo Coulombiano ed il coefficiente di attrito viene considerato indipendente dalla velocità di strisciamento. Il modello è stato costruito scrivendo per ogni elemento le equazioni di equilibrio tangenziale e radiale rispetto ad un sistema di riferimento polare (r,φ) (indicato in figura 1) con origine sull’asse di rotazione della puleggia e zero di riferimento angolare sul segmento che unisce i centri delle due pulegge. A queste equazioni si sono aggiunte quelle di equilibrio a rotazione delle due pulegge, su cui agiscono la coppia motrice/resistente e le azioni tangenziali di attrito degli elementi.
Le condizioni al contorno imposte al modello sono la velocità angolare della puleggia motrice, le coppie motrice e resistente applicate alle rispettive pulegge.
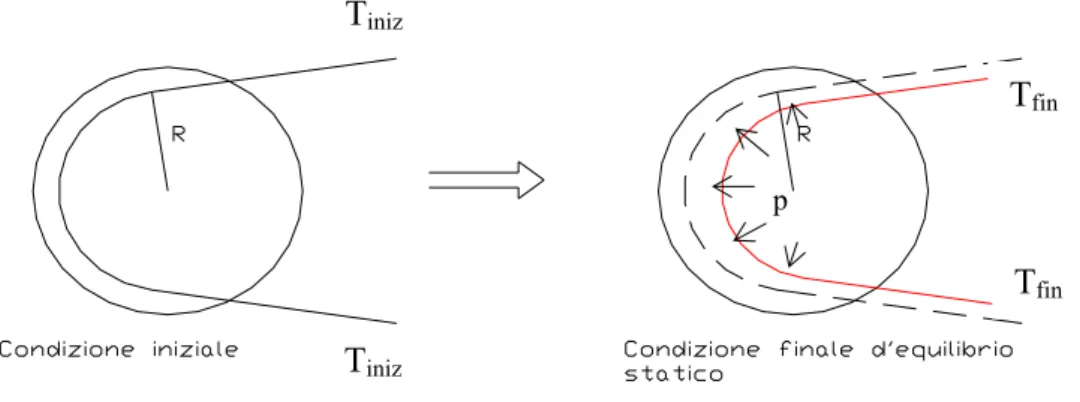
Durante il funzionamento del modello ottenuto sono emerse alcune problematiche legate principalmente al seguente fattore non prevedibile con il modello proposto: il valore della pretensione nella cinghia calcolabile teoricamente risulta incoerente con le condizioni di coppia imposte al modello. Questo accade per il fatto che dopo il montaggio la cinghia subisce una penetrazione radiale nella gola delle pulegge a causa della pretensione imposta (figura 2); nascono allora delle pressioni di contatto che stabilizzano la cinghia su un raggio di avvolgimento leggermente inferiore e per questo la tensione nei rami rettilinei si abbassa sensibilmente. Tiniz Tfin p Tfin Tiniz
Fig. 2 Condizioni iniziale e finale della cinghia sulla puleggia
Per analizzare questo fenomeno è stato messo a punto un modello, denominato nel seguito
“statico” per distinguerlo da quello dinamico completo, che riproduce tale fase di assestamento della cinghia a pulegge ferme; da esso sono stati ricavati dei grafici che consentono di visualizzare il legame tra la pretensione iniziale teorica e quella effettiva. Infine è da segnalare che il comportamento del modello dinamico è risultato fortemente dipendente dalla pretensione iniziale nella cinghia; dal momento che questo parametro dipende a sua volta dalla lunghezza della cinghia a riposo1 L0, si è proceduto per step successivi modificando ad ogni passo L0 in modo da ottenere prima un valore teorico della tensione e poi, con l’utilizzo del modello statico, il valore della tensione effettiva all’inizio della simulazione dinamica.
4. Analisi della fase di assestamento iniziale della cinghia
Lo sviluppo di un modello “statico” che descriva la fase di assestamento della cinghia dopo il montaggio ha come finalità quella di rivelare il legame che intercorre tra la tensione teorica iniziale, calcolabile attraverso le relazioni della meccanica dei continui, e la tensione effettiva nei rami rettilinei.
Indicando con L e L0 rispettivamente la lunghezza del percorso di avvolgimento e la lunghezza della cinghia scarica (ovviamente L0<L), la tensione teorica iniziale corrispondente ai raggi di avvolgimento nominali sulle pulegge può essere espressa come
EA L L EA Tiniz ⎟⎟⋅ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − = ⋅ = 1 0
ε
(2)dove si è indicato con EA il prodotto del modulo di Young per l’area media della sezione della cinghia. Se si considera una sola puleggia e si scrive l’equilibrio in direzione radiale e tangenziale per l’elemento infinitesimo di cinghia, come illustrato in [1], integrando su tutto l’arco di contatto e considerando la (1) si perviene ad una equazione in forma implicita che, risolta per via iterativa, fornisce il valore del raggio di assestamento r della cinghia in funzione della pretensione teorica iniziale Tiniz e dei parametri che caratterizzano la rigidezza del contatto.
L’espressione di tale equazione è la seguente:
0 ) ( ) ( 0 0 − − ⋅ ⋅ − = ⋅ − e iniz K r R r r r R EA T (3)
Noto il raggio di assestamento, la tensione effettiva nei rami può essere espressa dalla relazione r r R EA T r T T r T( )= iniz −∆ ( )= iniz − ⋅( 0 − ) (4)
Le equazioni (3) e (4) sono state risolte in ambiente Matlab® 6.5 e sono stati ottenuti dei grafici che individuano l’andamento della tensione effettiva rispetto alla tensione teorica iniziale al variare dei parametri di contatto Kl ed e della funzione (1) che descrive il contatto tra cinghia e puleggia.
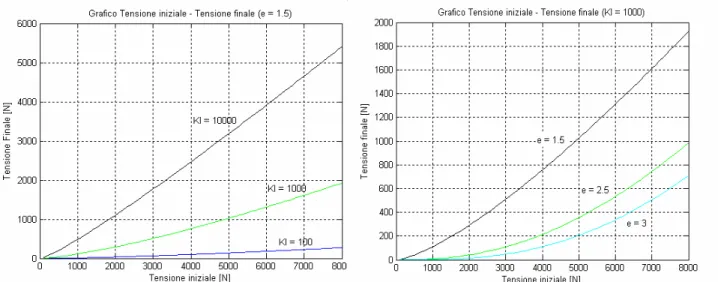
Si riporta in figura 4 il rapporto tra tensione iniziale e tensione finale al variare della rigidezza di contatto Kl e dell’esponente e.
Fig. 4 Tensione effettiva in funzione della tensione teorica iniziale
L’andamento delle curve Tiniz – Tfin è sempre caratterizzato dalla presenza di un primo tratto non lineare seguito da un tratto pressoché lineare. In questo senso l’accordo con i risultati forniti da un modello multibody sviluppato in ambiente Adams® nel corso di un precedente lavoro di tesi conferma la bontà del modello proposto.
Oltre alle curve appena illustrate, risulta interessante conoscere anche l’andamento istante per istante della tensione e del raggio di avvolgimento durante la fase di transitorio, poiché il modello analitico descritto dalle (3) e (4) fornisce solo i valori raggiunti al termine della fase di assestamento; in questa ottica è stato messo a punto un modello in ambiente Simulink® in grado di fornire queste informazioni. Dai risultati ottenuti si osserva che la tensione passa dal valore iniziale a quello di equilibrio finale in un tempo valutabile attorno ai 15 – 20 ms, risultando coerente con il valore calcolato in ambiente Adams® e stimato essere inferiore ai 30 ms. Al variare del rapporto di smorzamento D si sono inoltre osservate delle oscillazioni della tensione prima dell’equilibrio; lo stesso effetto si è ottenuto variando il coefficiente di attrito tra le superfici.
5. Simulazioni effettuate e risultati forniti dal modello dinamico
Il modello dinamico e la procedura di taratura della pretensione iniziale attraverso il modello 6
statico sviluppati in questo lavoro di tesi sono stati applicati a due tipi di CVT esistenti e montati da Piaggio sui motori di 200 cc e 500 cc. (indicati brevemente nel seguito con CVT 200 e CVT 500). I modelli sono stati simulati considerando applicata alla puleggia motrice la massima coppia erogata dal motore, mentre alla puleggia condotta è applicata una coppia resistente costante; il rapporto di trasmissione è costante e coincide con quello relativo alla marcia corta. La coppia motrice applicata è quella massima fornita dal motore e vale 17248 Nmm nel caso del CVT 200, 40600 Nmm per il CVT 500; la coppia resistente è pari a Cm/τ dove τ è il rapporto di trasmissione in marcia corta. L’imposizione della coppia motrice avviene secondo una rampa con istante iniziale a 0.5 s e istante finale a 1.5 s, in cui il valore si stabilizza a quello desiderato. Il numero di elementi per puleggia utilizzato è 40; sono state effettuate delle simulazioni con un numero maggiore di elementi ottenendo risultati equivalenti. Per quanto riguarda il valore degli archi di contatto tra cinghia e pulegge, sono stati ritenuti validi i valori calcolati in ambiente ADAMS® in quanto il presente modello non è in grado di dare una indicazione in tal senso.
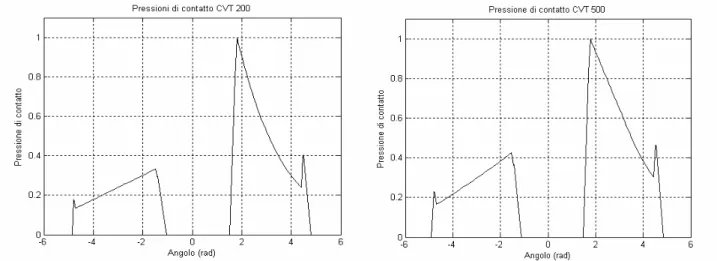
In figura 6 sono riportati per entrambe le trasmissioni gli andamenti delle pressioni di contatto sui fianchi; i valori sono normalizzati rispetto al valore massimo su puleggia motrice.
Fig. 6 Andamento delle pressioni di contatto
Si notano subito i picchi di pressione nelle fasi di ingresso e uscita dalla puleggia; tali picchi derivano dal repentino cambiamento di direzione della forza di trazione negli elementi di ingresso e uscita; il picco relativo di pressione sulla puleggia motrice è circa il 35% di quello massimo nel CVT 200, mentre risulta circa del 42% nel caso del CVT 500. Questo è spiegabile col fatto che in realtà il valore assoluto di pressione risulta decisamente più elevato sul CVT 200, a causa del minore raggio di avvolgimento che genera delle variazioni più brusche della tensione. In questo modo si crea una situazione notevolmente più critica per la durata utile
pressioni di contatto rilevate sulle pulegge motrici, in cui si è posto pari a 1 il valore massimo su CVT 200, mentre in figura 7-b è rappresentato lo stesso confronto ottenuto attraverso il modello multibody ADAMS®.
Fig. 7-a Pressioni di contatto normalizzate al valore massimo su CVT 200
Fig. 7-b Pressioni di contatto normalizzate al valore massimo su CVT 200 fornite dal modello ADAMS®
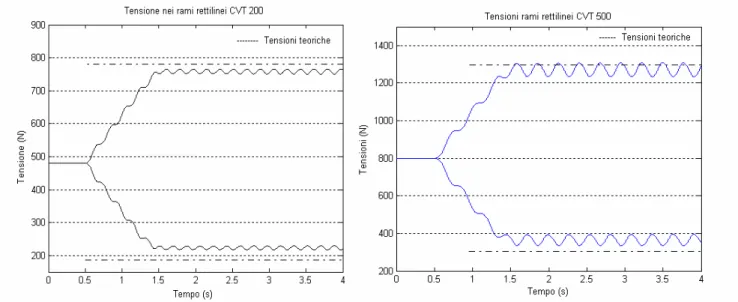
Si noti che, pur con un andamento delle pressioni semplificato rispetto a quanto ottenuto in ambiente ADAMS®, il modello proposto riesce tuttavia a fornire con ottima approssimazione i valori di picco massimo e relativo utili per una prima indicazione della vita utile della cinghia. È stato poi rilevato il ciclo di tensione nel tempo cui sono sottoposti elementi di cinghia disposti in posizioni differenti lungo il percorso di avvolgimento. Durante la fase di transitorio le tensioni seguono l’andamento crescente della coppia e si stabilizzano ad un valore diverso da quello teorico calcolabile attraverso le formule note in letteratura [6]; in particolare la tensione media nel ramo teso risulta più bassa, mentre quella nel ramo lento risulta più alta di quella calcolabile(figura 8), dando luogo così ad una tensione utile inferiore a quella teorica.
A causa delle perdite nella trasmissione è necessario dunque applicare alla puleggia motrice una coppia maggiore di quella indicata all’inizio della sezione per vincere la coppia resistente data;
il modello infatti calcola la tensione utile (intesa come differenza tra le tensioni nei rami teso e lento) disponibile sulla puleggia motrice e quella necessaria sulla puleggia condotta in base alle coppie assegnate; affinché i due valori coincidano, e quindi la coppia resistente sia bilanciata esattamente quella motrice, occorre che quest’ultima sia più elevata rispetto al valore teorico. Il punto di uguaglianza tra le tensioni utili è stato individuato variando per tentativi in passi successivi il valore della coppia motrice. La differenza tra il valore di coppia effettivo e quello
Fig. 8 Tensione nei rami teso e lento d
teorico fornisce una stima delle perdite nella trasmissione.
ella trasmissione
ella tabella 1 sono confrontati i risultati del modello con quelli ottenuti in ADAMS® e con N
quelli forniti dalle relazioni classiche considerando applicata la coppia motrice effettiva;
CVT 200
Valore medio modello (N) Valore medio Adams® (N) Valore teorico (N)Ramo teso 1123 1067 1128 Ramo lento 370 418 352 Tensione utile 753 649 776 Perdite coppia 11 % 20.5 % ---
CVT 500
Ramo teso 1680 1683 1679 Ramo lento 623 615 619 Tensione utile 1057 1068 1060 Perdite coppia 9 % 7 % ---Tab. 1 Confronto tra le tensioni nei rami rettilinei
accordo con i risultati teorici è ottimo nel caso del CVT 500, mentre sul CVT 200 la differenza riscontrata nella valutazione delle perdite di coppia è probabilmente da imputare al l’
fatto che il modello proposto in questo lavoro non tiene conto delle perdite dovute agli smorzamenti flessionali nella cinghia, che rivestono una importanza maggiore nel CVT 200 a causa dei minori raggi di avvolgimento.
6. Conclusioni
È stato proposto un modello a parametri concentrati per l’analisi dinamica di trasmissioni CVT Simulink® 5.0; il modello è stato utilizzato per lo studio delle
] B.G. Gerbert, Force and slip behaviour in V – belt drives, Acta Polytechnica Scandinavica, g Series No. 67, Helsinki (1972);
00, n Sect 6, 1991
SME Design Engineering Technical Conference, v 6 A, 2001;
g Technical Conference,
Pàtron Editore sviluppato in ambiente
trasmissioni CVT 200 e CVT 500 realizzate da Piaggio e si sono ottenuti gli andamenti delle pressioni di contatto sui fianchi della cinghia e le tensioni nei rami. I risultati forniti dal modello sono stati confrontati con quelli ottenuti tramite un modello multibody; dal confronto emerge la validità del modello proposto nel caso della trasmissione CVT 500, mentre nel caso del CVT 200 sono state osservate delle differenze imputabili alla mancanza di una schematizzazione della rigidezza flessionale nel modello proposto, attività lasciata ad ulteriori sviluppi futuri. Inoltre è stato messo a punto un secondo modello che simula la fase di assestamento della cinghia dopo il montaggio e fornisce il valore corretto della tensione iniziale e dei raggi di avvolgimento sulle pulegge. Infine è stata valutata la perdita di coppia nella trasmissione e si è proceduto ad un ulteriore raffronto con i modelli classici presenti in letteratura.
BIBLIOGRAFIA
[1Mechanical Engineerin
[2] C. R. Barker, L. R. Oliver, W. F. Breig, Dynamic analysis of belt drive tension forces
during rapid engine acceleration, SAE Transactions, v. 1
[3] A. Harrison, Modelling belt tension around a drive drum, Bulk Solids Handling, v 18, n 1, 1998
[4] M. J. Leamy, T. M. Wasfy, Dynamic finite element modelling of belt drives, Proceedings of the A
[5] M. J. Leamy, T. M. Wasfy, Effect of bending stiffness on the dynamic and steady-state
responses of belt-drives, Proceedings of the ASME Design Engineerin
2002
[6] E. Funaioli, A. Maggiore, U. Meneghetti, Lezioni di meccanica applicata alle macchine, Vol I,