Ottimizzazione di tratti di
circuito
In questo capitolo saranno oggetto di studio alcuni tracciati di esempio che si compongono di 2, 3 curve. Tali tracciati sono un esempio di composizione delle curve analizzate nel capitolo precedente. Scopo di tali ottimizzazioni è rendere evidente come la traiettoria ideale sia funzione dell’andamento della strada che precede e segue la singola curva.
5.1
Tracciato 1
5.1.1
Modellazione del problema
Il primo tracciato preso in esame è composta da una chicane destra-sinistra di raggi, calcolati dal centro della carreggiata, pari a 60 e 40 metri rispetti-vamente, un breve rettilineo lungo 25 metri circa ed un tornante di raggio pari a 40 metri. In uscita dal tornante è posto un altro breve rettilineo di 25 metri. Come nelle ottimizzazioni precedenti, antecedente alla prima curva è inserito un tratto rettilineo lungo 150 metri, che consente la partenza del veicolo alla velocità massima consentita ed un sufficiente spazio di frenata per l’ingresso in curva.
punti assegnati per il tracciamento della singola traiettoria sono stati imposti nel modo seguente
• 4 punti posti sul rettilineo d’ingresso ad una distanza, dall’inizio della prima curva, variabile tra 50 e 30 metri e posti in modo tale da gene-rare una traiettoria rettilinea. In questo modo si realizza la condizione iniziale di curvatura nulla nel rettilineo d’ingresso.
• 9 punti posti su altrettante perpendicolari al tracciato, nello sviluppo della chicane, ovvero uno ogni 22.5 gradi.
• 7 punti nello sviluppo del tornante, uno ogni 30 gradi.
• 4 punti sul rettilineo d’uscita, analogamente a quelli posti sul rettilineo d’ingresso.
La spline del quarto ordine interpolante i punti assegnati risulta essere com-posta da 20 tratti.
La curvatura massima del tracciato, calcolata nel centro della corsia, risulta
pari a 0.025 m−1. Il valore del passo d’integrazione che garantisce la
conver-genza del tempo di percorrenza risulta anche in questo caso pari a 25 cm, vedi figura 2.7, ed il tempo di calcolo di una singola traiettoria risulta di oltre 5 minuti.
5.1.2
Ottimizzazione
A causa dei lunghi tempi di calcolo associati al passo d’integrazione sopra indicato, è stato necessario procedere ad un processo di ottimizzazione “a cascata”, come eseguito nelle ottimizzazioni precedenti. In questo caso il nu-mero di variabili da ottimizzare è sensibilmente superiore ai casi precedenti. Infatti il processo di ottimizzazione coinvolge 18 variabili, ovvero le posizioni radiali dei 16 punti, posti su altrettante perpendicolari, nello sviluppo delle tre curve da analizzare e la posizione, nella corsia, dei punti posti sul rettili-neo d’ingresso e d’uscita.
A causa del superiore numero di variabili è stato necessario incrementare la dimensione della popolazione iniziale ed il numero di generazioni analizzate per garantire la convergenza dell’algoritmo genetico.
Come nei casi precedenti il primo processo di ottimizzazione è stato eseguito con un passo d’integrazione pari a circa 2 metri. Al seguito di questa prima operazione è seguito una seconda ottimizzazione, in cui il campo di variazione delle variabili è stato posto pari ad un quinto della corsia disponibile, a ca-vallo della soluzione ottenuta precedentemente.
Come scritto in precedenza l’ottimizzazione iniziale ha interessato un nu-mero molto elevato di curve. Si è imposta una dimensione della popolazione pari a 200 individui e le operazioni genetiche sulla famiglia di curve generate hanno interessato 200 generazioni. In tale modo sono state esaminate 40000 traiettorie possibili. In figura 5.1 è mostrato l’andamento del processo di ottimizzazione. Per completare tale processo è stato necessario un tempo di
0 20 40 60 80 100 120 140 160 180 200 20 20.5 21 21.5 22 22.5 23 GA Optimization Statistics Fitness Generazione # Migliore Valor Medio
calcolo di circa 6 h.
A tale operazione preliminare è seguito un successivo processo di ottimiz-zazione, in cui il passo d’integrazione utilizzato è stato posto pari a 25 cm. In tale analisi sono state confrontate solo 225 traiettorie differenti, attraverso una popolazione di 15 individui analizzata per 15 generazioni. Il tempo di calcolo impiegato per tale processo è stato superiore a 12h 30min. Si com-prende quindi il fondamentale contributo dato dall’operazione preliminare svolta per l’identificazione della traiettoria ottima.
5.1.3
Risultati
La traiettoria ottima risultante dal processo di ottimizzazione è mostrata in figura 5.2. Nelle figura successive sono mostrati l’andamento della cur-vatura, dell’angolo d’imbardata, della velocità effettiva posseduta dal veicolo ed infine l’andamento delle accelerazioni. Da quest’ultimo è evidente come l’algoritmo di calcolo sviluppato sfrutti completamente l’ellisse d’aderenza considerato. Infatti i punti rimangono sempre sulla frontiera di tale ellisse. Il tempo di percorrenza di tale traiettoria è pari a 20.23 secondi, a cui cor-risponde una velocita media di 24.93 m/s.
Osservando l’andamento della traiettoria ideale è possibile fare alcune con-siderazioni.
La traiettoria seguita nella percorrenza della prima curva è più larga rispetto a quella risultante dall’ottimizzazione della singola chicane. Tale comporta-mento è dovuto sia al più stretto raggio di curvatura, sia alla necessità di mantenere più alta possibile la velocità di percorrenza nell’affrontare la se-conda curva, che risulta avere un raggio di curvatura decisamente stretto (40 metri).
L’uscita dalla chicane è molto più stretta rispetto all’ottimizzazione riporta-ta nel paragrafo 4.2. Infatti in questo tracciato l’usciriporta-ta dalla seconda curva avviene circa a metà della corsia disponibile, al contrario dell’uscita dalla chicane precedente in cui la traiettoria seguita era molto larga per sfruttare
al massimo l’accelerazione nel rettilineo finale. Ciò avviene per consentire un adeguato ingresso nel tornante successivo, che si trova a soli 25 metri dalla fine della seconda curva.
La traiettoria di percorrenza del tornate è più stretta rispetto a quella mostra-ta in precedenza. Questo andamento è dovumostra-ta alla più bassa velocità d’in-gresso, che quindi premia una traiettoria di lunghezza minima.
0 50 100 150 200 −20 0 20 40 60 80 100 120 140 160 Traiettoria metri metri
0 50 100 150 200 250 300 350 400 −0.03 −0.02 −0.01 0 0.01 0.02 0.03 Curvatura metri 1/R c (1/m)
Figura 5.3: Curvatura della traiettoria ideale
−200 −100 0 100 200 300 400 15 20 25 30 35 40 45 50 55 60 Velocità di percorrenza metri velocità (m/s)
0 50 100 150 200 250 300 350 400 −2 −1.5 −1 −0.5 0 0.5 1 1.5 2 Imbardata metri psi(rad)
Figura 5.5: Angolo d’imbardata nella percorrenza della traiettoria ideale
−120 −10 −8 −6 −4 −2 0 2 4 6 1 2 3 4 5 6 7 8 Ax (m/s) Ay (m/s) Sfruttamento aderenza
Figura 5.6: Sfruttamento dell’ellisse d’aderenza nella percorrenza della
5.2
Tracciato 2
5.2.1
Modellazione del problema
Il secondo tracciato esaminato si compone di una curva verso destra con raggio decrescente da 60 a 20 metri, analoga a quella analizzata nel paragrafo 4.5, un breve rettilineo di 25 metri circa, una curva a sinistra di 90 gradi con raggio di curvatura di 40 metri ed una curva a 45 gradi, anch’essa verso sinistra, con raggio 60 metri. Queste due ultime curve sono raccordate da un tratto in rettilineo lungo 25 metri. In ingresso alla prima curva è posto, come effettuato in precedenza un tratto in rettilineo lungo 150 metri, in modo da garantire un sufficiente spazio di frenata. Inoltre, in uscita dall’ultima curva il percorso analizzati si completa con un breve tratto in rettilineo di circa 25 metri. I valori riportati per i raggi di curvatura sono da intendersi, come nei casi precedenti, calcolati dal centro della corsia. Anche per questo tracciato, infine, la larghezza della carreggiata disponibile alla manovra è posta pari a 3 metri.
L’imposizione dei punti di passaggio per l’interpolazione avviene secondo il seguente schema
• 4 punti sul rettilineo d’ingresso, come nelle precedente ottimizzazione. • 7 punti nello sviluppo della curva con raggio di curvatura decrescente
(uno ogni 22.5 gradi).
• 5 punti nelle curva a 90 gradi (uno ogni 22.5 gradi). • 3 punti nella curva a 45 gradi (uno ogni 22.5 gradi). • 4 punti sul rettilineo d’uscita.
La spline interpolante i punti assegnati risulta quindi essere composta da 19 tratti.
La curvatura massima del tracciato risulta pari a 0.05 m−1, nel tratto finale
convergenza del tempo di percorrenza di 0.21 metri. Con tale valore il tempo necessario al calcolo di una singola traiettoria è superiore ad 8 minuti.
5.2.2
Ottimizzazione
Anche in questo caso il tempo di calcolo necessario per raggiungere la con-vergenza del tempo di percorrenza al centesimo di secondo, risulta proibitivo per una singola ottimizzazione che tenda ad ottimizzare l’elevato numero di variabili in gioco.
Infatti in questo caso il numero di variabili è pari a 17, 15 associate alla po-sizione radiale dei punti di passaggio attraverso le altrettanti perpendicolari nello sviluppo delle tre curve e 2 legate alla posizione dei 4 punti assegnati sul rettilineo d’ingresso e d’uscita.
Tale elevato numero di variabili da ottimizzare necessita di un processo che coinvolga un numero considerevole di curve. Anche in questo caso è sta-to effettuasta-to un processo di ottimizzazione in due fasi. Nella prima fase è stato posto il passo d’integrazione ∆s pari a circa 2 metri e, come nell’ot-timizzazione precedente, la dimensione della popolazione è posta pari a 200 individui, mentre il numero di generazioni considerate sono state 200. In figu-ra 5.7 è mostfigu-rato l’andamento del processo di ottimizzazione che ha richiesto un tempo di calcolo di circa 6 ore. A seguito di questa prima ottimizzazione, è stato effettuato un secondo processo che ha coinvolto solo 100 traiettorie, ovvero 10 individui per 10 generazioni. Il tempo di percorrenza di tali traiet-torie è stato calcolato con il passo d’integrazione necessario ad ottenere la convergenza, ed il campo di variazione delle variabili è stato posto pari ad un quinto della corsia, a cavallo del risultato precedentemente ottenuto. Tale processo ha impiegato un tempo di circa 10 ore ed i risultati ottenuti sono mostrati nel paragrafo seguente.
0 20 40 60 80 100 120 140 160 180 200 17 17.5 18 18.5 19 19.5 20 20.5 21 GA Optimization Statistics Fitness Generazione # Migliore Valor Medio
Figura 5.7: andamento del processo di ottimizzazione
5.2.3
Risultati
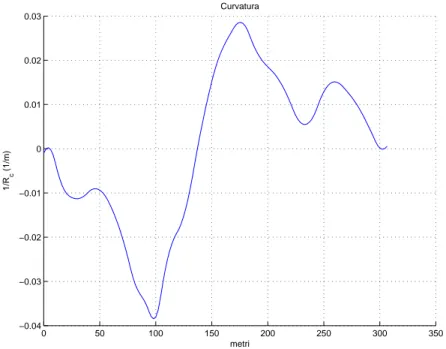
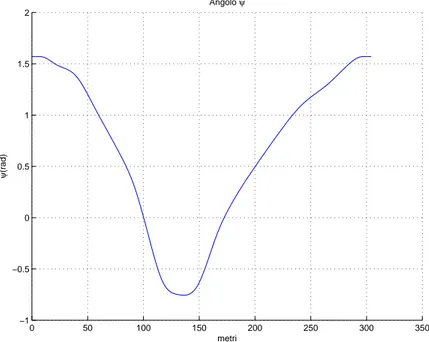
Sono mostrati nelle figure seguenti la traiettoria, la curvatura, l’andamento della velocità e l’angolo d’imbardata, ottenuti alla fine del processo di ot-timizzazione sopra esposto.
La velocità media del veicolo nella percorrenza della traiettoria è risultata pari a 25.24 m/s. Il tempo impiegato a percorrere la traiettoria mostrata in figura 5.8 è pari a 16.8 secondi.
Confrontando il risultato ottenuto, con quello dell’ottimizzazione delle sin-gole curve si può notare come in questo caso la traiettoria seguita nella prima curva sia in pratica coincidente nelle due differenti ottimizzazioni.
E’ invece interessante notare come le successive due curve, distanziate da un rettilineo molto breve, siano eseguite con un unica manovra.
0 20 40 60 80 100 120 140 160 −20 0 20 40 60 80 100 Traiettoria metri metri
Figura 5.8: Traiettoria ideale nel tracciato 2
0 50 100 150 200 250 300 350 −0.04 −0.03 −0.02 −0.01 0 0.01 0.02 0.03 Curvatura metri 1/R c (1/m)
−150 −100 −50 0 50 100 150 200 250 300 350 10 15 20 25 30 35 40 45 50 55 60 Velocità di percorrenza metri velocità (m/s)
Figura 5.10: Velocità nella percorrenza della traiettoria ideale
0 50 100 150 200 250 300 350 −1 −0.5 0 0.5 1 1.5 2 Angolo ψ metri ψ (rad)