4. MONORAIL
4.1 Definizione e caratteristiche principali
4.1.1 Definizione
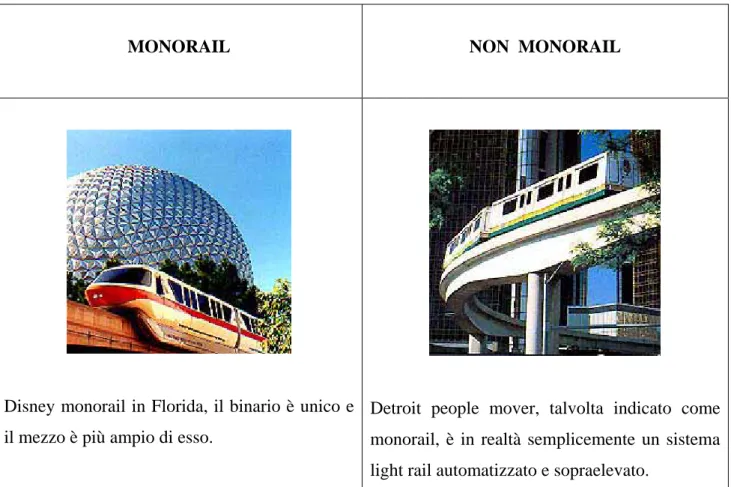
Un sistema monorail è un sistema di trasporto collettivo dotato di un unico binario, tipicamente impiegato per il trasporto passeggeri ma utilizzabile anche per trasporto merci. La rotaia è solitamente elevata, ma può anche trovarsi al livello stradale e in tunnel; i mezzi possono essere del tipo “ suspended ”, sospesi sotto il binario, oppure del tipo “ straddle-beam ”, letteralmente “ a cavalcioni sulla trave ”, con i mezzi che scorrono su un binario sotto di essi, più stretto rispetto alla loro ampiezza. Questa caratteristica è vera per ogni tipo di monorail, e distingue questo sistema da altri tipi di “ people mover ” con cui spesso vengono confusi. Per evitare questa confusione sono riportati dei confronti tra sistemi monorail e non monorail in figura 4.1 e 4.2 tratte da [19].
MONORAIL NON MONORAIL
Disney monorail in Florida, il binario è unico e il mezzo è più ampio di esso.
Detroit people mover, talvolta indicato come monorail, è in realtà semplicemente un sistema light rail automatizzato e sopraelevato.
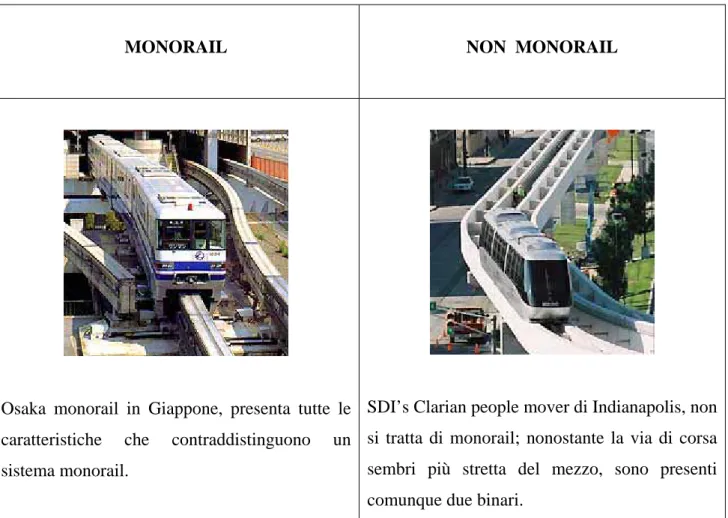
MONORAIL NON MONORAIL
Osaka monorail in Giappone, presenta tutte le caratteristiche che contraddistinguono un sistema monorail.
SDI’s Clarian people mover di Indianapolis, non si tratta di monorail; nonostante la via di corsa sembri più stretta del mezzo, sono presenti comunque due binari.
Figura 4.2 – Sistemi monorail e non monorail
4.1.2 Caratteristiche peculiari dei monorail e differenze con altri sistemi
Le informazioni sono state tratte da [19], anche per i successivi paragrafi. I principali vantaggi di un sistema monorail riguardano fondamentalmente i seguenti aspetti :
- affidabilità e sicurezza;
- integrazione con l’ambiente urbano;
- gradimento degli utenti e interesse dei costruttori; - possibilità di profitto.
Per quanto riguarda l’aspetto dell’affidabilità e sicurezza, bisogna dire che sono molti i passeggeri che utilizzano monorail in tutto il mondo; solo a Tokyo sono oltre 100 milioni i passeggeri l’anno, praticamente senza incidenti. L’unico incidente mortale si è registrato a Wuppertal, in Germania, in cui sono decedute quattro persone, una cifra neanche confrontabile con quella riguardante altri
sistemi di trasporto, specie di tipo automobilistico. D’altronde il particolare design del monorail, in entrambe le sue realizzazioni “ suspendend ” o “ straddle ”, rende praticamente impossibile il deragliamento. Inoltre, avendo una propria sede, non è soggetto ad incidenti con altre forme di traffico veicolare, come accade spesso invece in sistemi light rail.
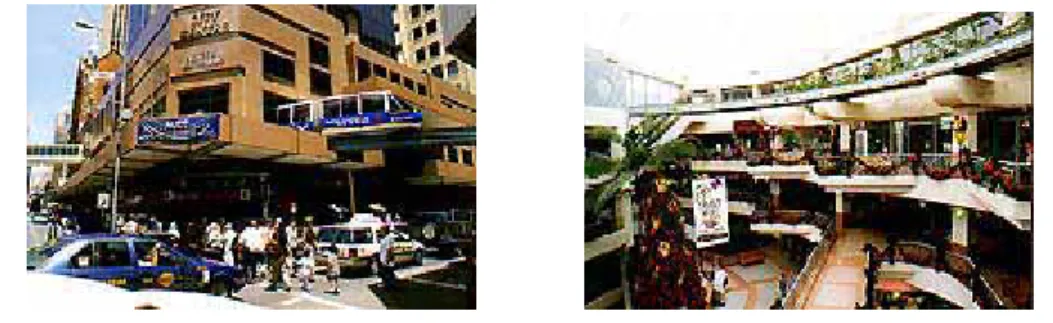
L’integrazione con l’ambiente urbano è un’altro vantaggio di un sistema monorail. I pneumatici in gomma lo rendono molto silenzioso e la mancanza di linea aerea, in quanto alimentati dalla rotaia, li rende poco intrusivi. In figura 4.3 sono riportati due esempi di perfetta integrazione : una stazione mascherata in un edificio a Sydney e una rotaia all’interno di un centro commerciale a Broad Beach, sempre in Australia.
Figura 4.3 – Due esempi di integrazione in ambiente urbano di sistemi monorail
Questo è uno dei motivi che lo rende particolarmente gradito all’opinione pubblica e che sta destando l’interesse dei costruttori. Sono già diversi, infatti, i nuovi sistemi in fase di progetto o costruzione in molti Paesi.
La possibilità di ottenere dei profitti con un sistema monorail, cosa molto difficile con light rail o metropolitane, è un altro vantaggio di questo sistema. Tokyo monorail, in funzione dal 1962, dichiara un utile ogni anno, lo stesso quello di Seattle.
Gli svantaggi invece riguardano principalmente i seguenti aspetti :
- necessità di sede dedicata, non necessaria per light rail , e quindi maggiori costi di costruzione; - maggiore intrusione visiva rispetto ad una metro sotterranea, anche se inferiore a quella di light rail elevato;
- mancanza di standard, presenti solo in Giappone; - capacità e velocità ancora in discussione.
4.1.3 Cenni storici
Vengono passati in rassegna i sistemi più importanti nella storia dei monorail. La prima forma di sistema di questo tipo risale al 1825, la Cheshunt railway ,che utilizzava cavalli per la propulsione; concepita per il trasporto di mattoni, alla sua apertura venne inaugurata trasportando passeggeri. Nel l876, invece, venne testato per la prima volta, a Philadelphia, un sistema mosso da un motore a vapore, brevettato dalla General Le-Roy Stone's. Un impulso venne dato però dall’introduzione della trazione elettrica nel 1887 da parte della Enos Electric Company, con la prima forma di “suspended ” monorail e l’utilizzo di travi in acciaio, molto più leggere di quelle utilizzate fino ad allora, in legno. Il sistema non ebbe ulteriori sviluppi ma probabilmente esercitò una certa influenza sulle idee di Eugen Langen in Germania, progettista del Wuppertal monorail. Questo sistema, in esercizio dal 1901 ed ancora in funzione, è senza dubbio il primo vero monorail modernamente inteso. Una certa importanza ha avuto anche il monorail di Genova messo a punto da Carminati e Toselli che, nonostante sia rimasto in funzione solo per pochi anni e poi smantellato, è stato il precursore del fortunato ALWEG monorail. Questo sistema (figura 4.4) è stato il primo ad essere testato, nel 1952, dopo una pausa nella costruzione di nuovi sistemi di trasporto dovuta alle due guerre mondiali.
Figura 4.4- Realizzazione di un ALWEG monorail
Basato su un idea dello svedese Axel Lennart Wenner-Gren, con lo scopo di utilizzarlo per collegamenti ad alta velocità tra città, iniziò la sua fortuna, anche per trasporto urbano, quando nel 1959 venne utilizzato a Disneyland, diventando senza dubbio il più conosciuto sistema monorail. Sono molti oggi i sistemi di questo tipo, e molti altri sono in costruzione. Notevole importanza ebbe anche il primo sistema monorail in Giappone, allo Ueno zoo di Tokyo, basato sul Wuppertal modernizzato, che segnò l’inizio dello sviluppo di questi sistemi in Giappone, oggi il Paese con il maggior numero di monorail. Nel 1959 venne invece brevettato il sistema SAFEGE monorail
(figura 4.5), ad opera del francese Lucien Chadenson, che oggi è, insieme all’ALWEG, il principale tipo di monorail.
Figura 4.5 - SAFEGE monorail
Del tipo “ straddle ”, presentava per la prima volta ruote in gomma scorrevoli all’interno di un vero e proprio box, al riparo dagli agenti atmosferici; venne ben presto utilizzato per la costruzione di nuovi impianti, soprattutto in Giappone. La spinta verso lo sviluppo attuale dei monorail venne data dalla costruzione del Tokyo/Haneda nel 1964, basato sull’ALWEG design, e ancora oggi in funzione sempre con un consistente utile annuo.
4.1.4 Alimentazione , propulsione , segnalamento e controllo
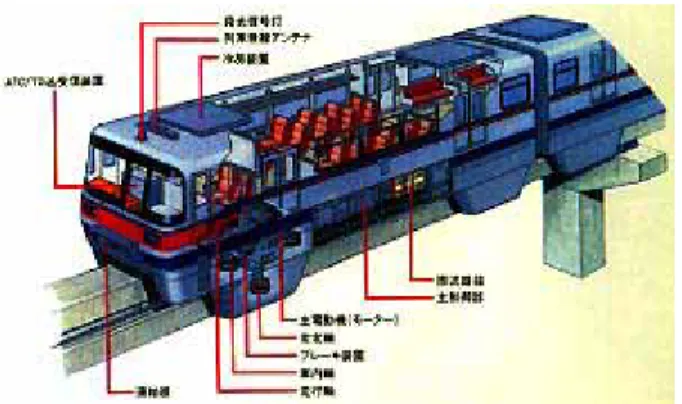
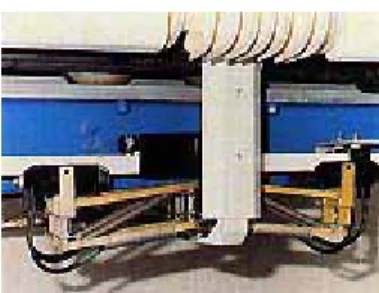
L’alimentazione avviene tipicamente tramite una rotaia posta al centro della trave su cui scorre il mezzo, oppure tramite due rotaie gemelle poste ai lati di essa. Nel caso “ straddle ” la rotaia d’alimentazione si trova all’interno del box di scorrimento. L’alimentazione è, nella maggior parte dei casi, a 500 – 600 V o 1500 V DC, anche se non mancano soluzioni a 500 V AC. L’energia viene portata a bordo tramite prese di corrente a pantografo scorrevole sulla rotaia sottostante il mezzo, o tramite due pantografi gemelli a seconda dei casi sopradetti (figura 4.6).
Per quanto riguarda il sistema di propulsione le soluzioni sono simili a quanto visto nel paragrafo 3.4 sui light rail ; vengono utilizzati azionamenti a frazionatore e motore DC o con inverter e motore asincrono. Nel caso di alimentazione in AC si ha raddrizzazione a bordo e motore DC. Tipico dei monorail, in particolare del tipo Maglev, sono gli azionamenti con motore lineare. Motori lineari e Maglev monorail vengono trattati nel prossimo paragrafo.
Per quanto concerne le modalità di segnalamento e controllo, la sede completamente riservata permette, al contrario dei light rail, dei meccanismi più automatizzati; vengono tipicamente utilizzati sistemi a sezioni di blocco fisso, con treni operanti in maniera semi o totalmente automatica con l’impiego di ATP (vedi 3.5.), utilizzati solo in tratti particolari sulle linee light rail.
4.2 Maglev monorail
Con il termine Maglev monorail si indica un sistema con sospensioni e propulsione di tipo magnetico. Il mezzo non si muove tramite il contatto ruota rotaia, ma resta sospeso ad una piccola altezza (ordine di grandezza delle decine di mm), grazie all’azione di potenti magneti. Quindi, risultando l’attrito molto ridotto, permette di raggiungere velocità molto elevate e grandi prestazioni in termini di accelerazioni e decelerazioni, evitando, tra l’altro, il fastidioso problema dell’aderenza. Il Maglev monorail è nato per il trasporto ad alta velocità, ma si ritiene possa trovare applicazione anche in ambito urbano.
4.2.1 Modalità di lievitazione
Sono due i sistemi di lievitazione utilizzati su Maglev monorail : “ Electromagnetic suspension (EMS) “ , nota anche come lievitazione attrattiva e “ Electrodinamic suspension (EDS) “, nota invece come lievitazione repulsiva. Gli studi riguardo questi sistemi, sebbene vengano ritenuti solitamente molto recenti, in realtà risalgono ai primi del Novecento ad opera di Emile Bachelet. Solo negli anni Sessanta però, con l’avvento dei magneti superconduttori, questi sistemi hanno iniziato ad avere un maggiore sviluppo.
Nei sistemi EMS dei potenti elettromagneti, posti sul veicolo, vengono attratti dalla parte inferiore della trave di scorrimento e lo tengono sollevato permettendo la lievitazione, come si può vedere in figura 4.7 (sinistra), in cui è rappresentata anche una realizzazione pratica di un transrapid maglev (destra).
Figura 4.7 – EMS Maglev
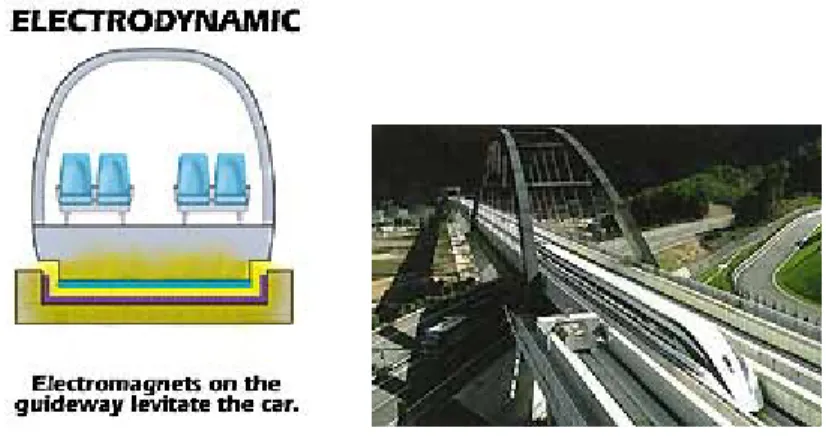
Nei sistemi EDS , invece, gli elettromagneti sono posti sulla via di corsa e, respingendo il veicolo, lo tengono sollevato, come si può notare in figura 4.7 (sinistra) in cui è rappresentata anche una realizzazione di fattura giapponese (destra).
Figura 4.7 – EDS Maglev
Uno sviluppo del sistema EDS è “ INDUTRACK “, in fase di test ad opera della Lawrence Livermore national laboratory negli USA. Questo sistema, rappresentato in figura 4.8, utilizza dei magneti permanenti al posto degli elettromagneti, risolvendo gran parte dei problemi relativi ai magneti superconduttori, come il sistema di raffreddamento criogenico.
Figura 4.8 – Sistema EDS INDUTRACK
In generale, gli elettromagneti utilizzati per la lievitazione, sono integrati anche con il sistema di propulsione, che utilizza motori lineari.
4.2.2 Motori lineari
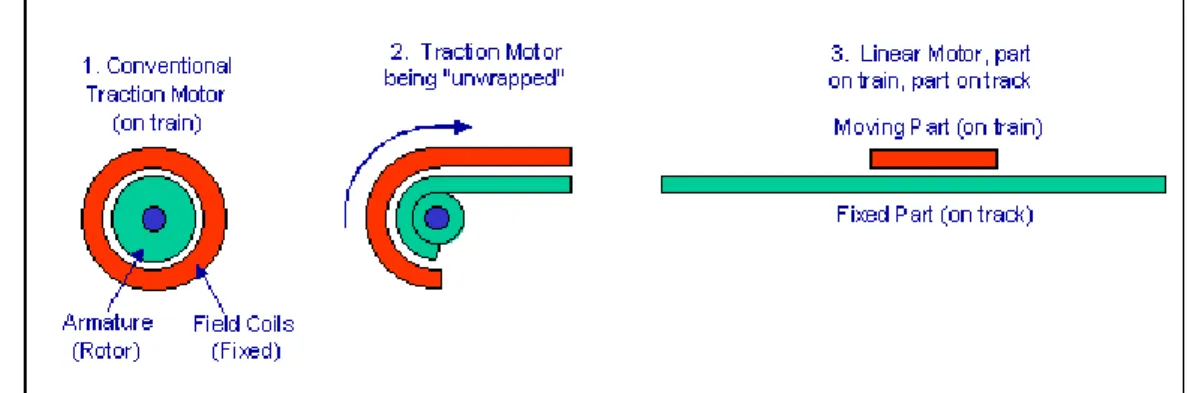
Un motore rotativo ha bisogno di un sistema apposito per trasformare un moto di rotazione in moto lineare. L’idea di base di un motore lineare è, invece, di ottenere il moto desiderato in maniera diretta, senza riduttori e trasmissione. Per fare questo si può pensare di “ srotolare ” la parte fissa e la parte mobile di un motore di trazione, sia esso sincrono, asincrono o in continua, in modo che una parte si trovi sul mezzo e l’altra sul binario, a seconda del tipo di realizzazione. Quella in figura 4.9 prevede quello che era lo statore sul mezzo, ma può essere anche sul binario.
Le realizzazioni pratiche, per i Maglev monorail sono fondamentalmente di due tipi : motori lineari a induzione, “ linear induction motor (LIM) “ e motori lineari sincroni, “ linear synchronus motor (LSM) “.
I primi sono concettualmente dei motori asincroni “ srotolati ”, e l’unica realizzazione prevede la parte di propulsione sul mezzo, con un avvolgimento trifase alimentato da inverter a bordo e parte fissa sul binario, solitamente lastre in alluminio che equivalgono al rotore del motore rotativo. Come si può vedere in figura 4.10, il gap tra i due avvolgimenti deve essere molto ridotto, solitamente 10 – 20 mm.
Figura 4.10 – Ridotto gap tra parte fissa e mobile di motore lineare
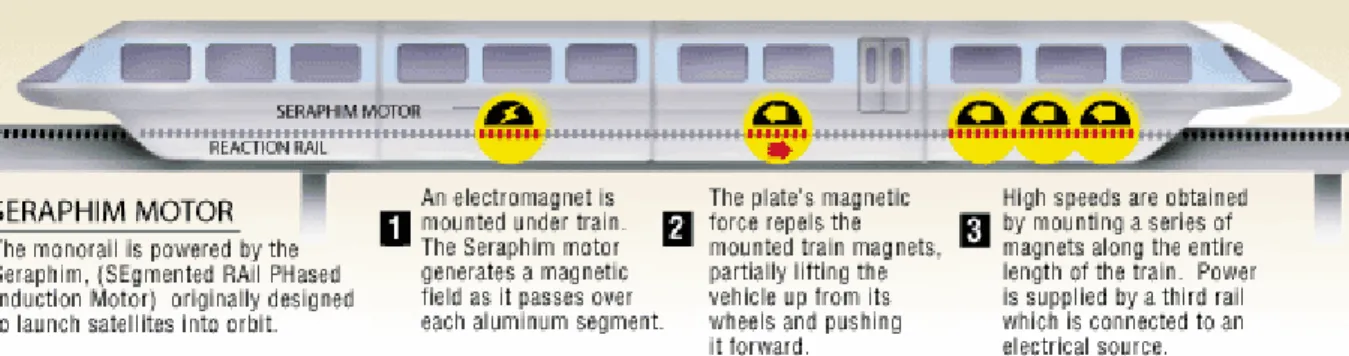
Il sistema necessita di un sistema di captazione, che avviene tramite apposita presa da una rotaia. Un LIM innovativo è il Seraphim motor messo a punto dai Sandia national laboratories, il cui funzionamento è illustrato in figura 4.11.
Figura 4.11- Un LIM innovativo : Seraphim motor dei laboratori Sandia
Il Seraphim motor funziona alimentando in sequenza degli elettromagneti posti sul veicolo, i quali inducono la formazione di un campo magnetico opposto in bobine poste sul binario. La repulsione
che scaturisce accelera il veicolo in transito; dei sensori che rilevano la posizione relativa tra bobine a bordo e sul binario comandano l’accensione degli elettromagneti, in modo da ottenere accelerazioni e decelerazioni desiderate.
Le realizzazioni pratiche di motori sincroni lineari (LSM) prevedono, invece, l’alimentazione di un avvolgimento posto nel binario tramite stazioni di inverter, corrispondente ad uno statore di diametro infinito (il cosiddetto “ lungo statore ”). Sul mezzo vengono a trovarsi solo dei magneti permanenti, che svolgono la funzione del rotore nel motore rotativo. Questo permette anche di utilizzare gli stessi magneti sia per la propulsione che per la lievitazione in soluzioni con EDS, come nel sistema innovativo Magnemotion descritto nel paragrafo successivo.
4.2.3 Un Maglev monorail per sistemi urbani
Sebbene gli studi sui Maglev monorail si siano inizialmente indirizzati verso la creazione di sistemi ad alta velocità, tipicamente per collegamento tra città, sono oggi in fase di sperimentazione diverse soluzioni che ne prevedono l’utilizzo in ambiente urbano. Tra queste, di particolare interesse risulta la soluzione Magnemotion M3, già in fase di prototipo, scaturita da un progetto della federal transit administration ( FTA) americana; le informazioni a riguardo sono state tratte da [20], cui si rimanda in caso di approfondimenti. Il Magnemotion urban Maglev system si propone come un’alternativa a light rail, commuter rail, automatic people mover, basandosi su minori costi d’investimento ed esercizio, maggiore velocità commerciale e minori assorbimenti di energia.
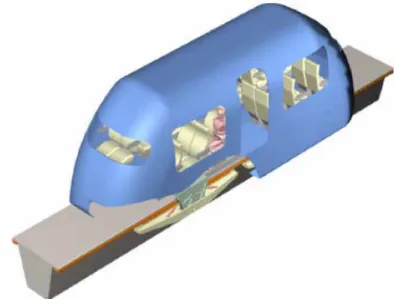
In figura 4.12 è rappresentato il design di base del veicolo e della trave di scorrimento.
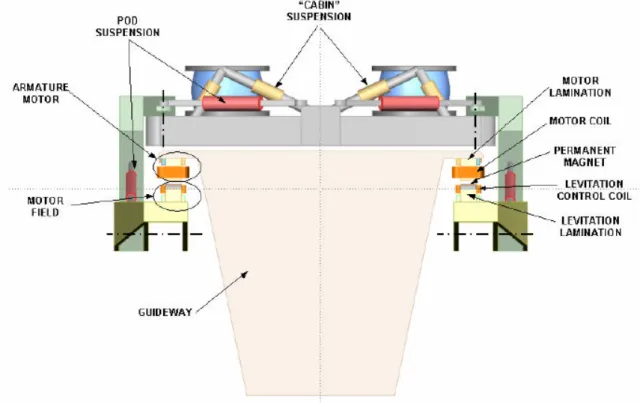
Il sistema utilizza un meccanismo di lievitazione di tipo electromagnetic suspension (EMS) e un motore lineare sincrono (linear synchronus motor, LSM) per la propulsione. Vengono utilizzati gli stessi magneti permanenti sia per la lievitazione che per la propulsione, come si può vedere in figura 4.12.
Figura 4.12 – Sezione di sistema di sospensione e trave di scorrimento del veicolo
Il sistema d’alimentazione prevede delle sottostazioni dotate di raddrizzatori che operano la trasformazione in continua, alimentando una sbarra a 750 V DC che connette gli inverter di linea (figura 4.13).
Figura 4.13 – Sistema di distribuzione
Le sottostazioni di conversione sono poste ad una distanza variabile tra 5 e 10 km, in base alla densità dei mezzi e il profilo d’accelerazione. L’avvolgimento di statore del LSM è diviso in blocchi, e per ognuno di essi è prevista una stazione d’ inverter che aziona il veicolo in transito.
Il progetto di base prevede veicoli capaci di trasportare 24 passeggeri seduti e 12 in piedi. È previsto il raggiungimento di velocità di circa 160 km/h e accelerazioni dell’ordine di 2 m/s2. Il sistema è in fase di prototipo e sono previsti ulteriori test prima di una realizzazione commerciale.
4.3 Un caso studio : ALWEG Hitachi
Il sistema ALWEG è stato introdotto con successo in Giappone dalla Hitachi. Vi sono cinque sistemi in esercizio e due in costruzione in Giappone, e un altro costruito a Kuala Lumpur in Malesia. Il primo, in ordine di tempo, è quello del Inuyama Amusement Park, presso Nagoya, del 1962. Gli ultimi sono quelli di Toyko Disneyland e Naha, in Okinawa. Sono due gli stili utilizzati per i monorail Hitachi : lo stile utilizzato sulla Tokyo-Haneda e il nuovo stile utilizzato come standard dalla Japanese Monorail Association, che prevede dei veicoli più spaziosi e con pianale molto basso. Due esempi di realizzazione di Hitachi sono riportati in figura 4.14, Tama monorail (sinistra) e Osaka monorail (destra).
Figura 4.14 – Realizzazioni di ALWEG Hitachi
Interessante è anche la soluzione Hitachi small monorail, di dimensioni ridotte e adatto anche in centri urbani di minore importanza. Nel 2002 questo sistema è stato acquistato dalla città di Sentosa, vicino Singapore.
Si analizzano ora i vari sistemi che caratterizzano l’ ALWEG Hitachi monorail.
L’infrastruttura per il sistema viene costruita con il metodo “ beam on column ”, ovvero i blocchi di trave di scorrimento sono semplicemente posti su delle colonne di supporto. I blocchi sono lunghi
85 m e alti 1.5 m, mentre le colonne di supporto sono alte 20 o 30 m. Un design innovativo è stato introdotto per Kuala Lumpur monorail, con delle travi ad arco (figura 4.15)
Figura 4.15 – Design innovativo con travi ad arco per il Kuala Lumpur monorail
I veicoli vengono costruiti in lega di alluminio, le loro dimensioni sono 3 m in larghezza, 4.5 m in altezza e circa 60 m in lunghezza e possono essere costituiti da due o quattro unità. Una realizzazione a due unità per il Naha monorail di Okinawa è rappresentato in figura 4.16.
Figura 4.16 – Veicolo a due unità per il Naha monorail di Okinawa
Un veicolo di quattro unità ha una capacità di 632 passeggeri, di cui 156 seduti, ed è in grado di trasportare 18960 pass/ora per direzione di marcia, con degli intertempi di 2 minuti.
I veicoli sono dotati di pneumatici in gomma e sono previsti anche dei pneumatici d’emergenza, di dimensioni ridotte, in caso di malfunzionamento dei principali. Il sistema di sospensione è invece costituito da veri e propri airbag gemelli.
L’alimentazione avviene tramite sottostazioni che effettuano la conversione dalla rete industriale, tipicamente a 33 kV, ad una sbarra in DC a 1500 V. Nel Kuala Lumpur monorail vi sono tre sottostazioni in cui sono localizzati i raddrizzatori, ognuna fornisce 28 MW ed è dotata di un banco di resistori della taglia di 280 kW, per gestire la frenatura.
La presa di corrente è costituita da un pantografo strisciante sotto il mezzo, che capta la corrente da un lato della trave di scorrimento. La propulsione è fornita da motori di trazione AC asincroni da 75 kW azionati da VVVF (variable voltage variable frequency) inverter. Quando è possibile viene applicata la frenatura a recupero, con risparmi di energia fino al 20-30 %; per le frenate a bassa velocità sono invece previsti dei freni a disco. La velocità massima raggiungibile è di circa 80 km/h. Il sistema di segnalamento utilizzato è un sistema a sezioni di blocco fisse, con i treni operanti in modo semiautomatico con ATP (vedi 3.5).