CAPITOLO 1
LE SOSPENSIONI INTELLIGENTI
1.1 Introduzione
Le sospensioni sono un componente fondamentale per qualsiasi veicolo. Il loro compito è infatti quello di isolare il veicolo stesso dalle irregolarità del terreno.
Tradizionalmente sono costituite da un sistema molla-smorzatore, sistema che trova ancora applicazioni su veicoli di fascia medio-bassa. Nel corso degli anni sono stati sviluppati sistemi che, adattandosi alle varie condizioni in cui il veicolo si viene a trovare, riescono a mantenere costante l’assetto del mezzo.
Da una ricerca bibliografica preliminare si è potuto osservare come la maggior parte dei lavori presenti sia rivolta al settore automobilistico. Il mio lavoro va a porre l’attenzione su un sistema di sospensioni di tipo adattivo, studiato in particolare per veicoli a due ruote.
1.2 Comportamento della sospensione in funzione del coefficiente di smorzamento
Esistono vari parametri per misurare le prestazioni di un sistema di sospensioni. I più significativi sono:
• ride confort, direttamente legato alle accelerazioni percepite dal pilota dovute alle irregolarità della strada;
• body motion, legato a rollio e beccheggio, fenomeni prodotti in curva o in frenata;
• road handling, associato alle forze di contatto tra strada e pneumatico.
La tenuta di strada per quanto riguarda la dinamica del veicolo è principalmente legata al carico sulla ruota. Un alto carico permette una buona trasmissione delle forze tra il terreno e la ruota. Al contrario, bassi carichi possono causare mancanza di controllabilità del veicolo.
Naturalmente il comfort è altrettanto importante per il passeggero. Esso è legato all’accelerazione del corpo del veicolo (spesso chiamato massa sospesa in opposizione al corpo ruota-sospensione detto massa non sospesa).
Un modello per considerare le accelerazioni verticali è il “ quarter of car”, rappresentato in figura 1.1 secondo lo schema semplificato che non prende in considerazione la massa e il coefficiente elastico del pneumatico.
Figura 1.1: modello quarter of car semplificato
L’intero veicolo a due ruote sarebbe rappresentabile con il modello “ half car”, ma per le mie esigenze il primo si è rivelato più che sufficiente.
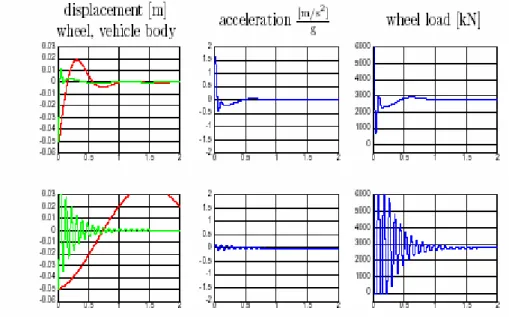
Figura 1.2: accelerazioni e spostamento della massa sospesa
per valori di smorzamento limite
In figura 1.2 sono rappresentati proprio con riferimento al modello quarter of car le accelerazioni e gli spostamenti della massa sospesa [5].
In particolare essi sono corrispondenti a due valori limite di smorzamento, corrispondenti al fatto di prendere in considerazione
l’ ottimizzazione della tenuta di strada, e quindi la forza di contatto tra strada e pneumatico, o del comfort.
È facilmente osservabile che i due obiettivi richiedono regolazioni che vanno in direzioni differenti, ovvero per migliorare una caratteristica della sospensione si finisce inevitabilmente col peggiorare l’altra.
Tutti i veicoli “tradizionali”, quelli cioè che possiedono sospensioni puramente passive, presentano delle regolazioni degli ammortizzatori secondo un valore di compromesso previsto dalla casa costruttrice in relazione anche alla tipologia di veicolo e al naturale impiego dello stesso. Ad esempio un veicolo pensato per viaggiare in pista poco si adatterà ad un utilizzo su strade di un qualsiasi centro storico.
Questo valore di compromesso viene spesso determinato in base a delle prove condotte su piste appositamente create per simulare i diversi tracciati stradali.
Analizzando le figure di cui sopra è osservabile il fatto che se si ottimizza la tenuta stradale c’è una rapida regolazione delle oscillazioni avendo però forti accelerazioni sul corpo veicolo. Al contrario, ottimizzando il comfort, si vede come la ruota impieghi un tempo molto lungo per terminare l’oscillazione, con conseguente peggioramento del contatto ruota terreno.
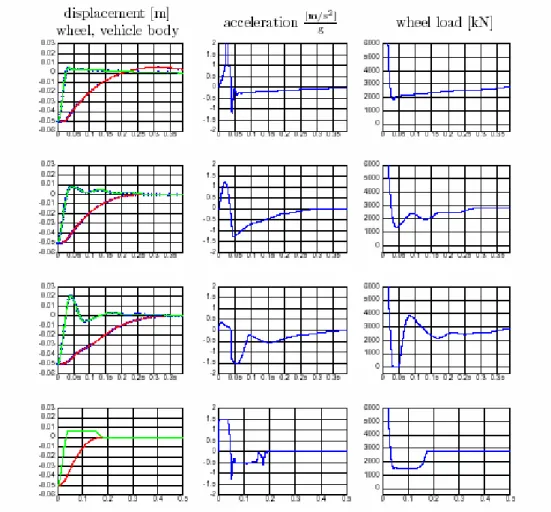
Nelle figure seguenti è possibile invece vedere il comportamento in alcune situazioni di compromesso.
Come si può notare al diminuire della rigidità della sospensione diminuisce l’accelerazione della massa sospesa.
Figura 1.3: accelerazione e spostamento della massa sospesa al
variare del coefficiente di smorzamento
1.3 Algoritmo Sky-Hook
Tutte le tipologie di sospensioni puramente attive fanno riferimento all’algoritmo Sky-Hook.
In realtà lo Sky-Hook damper è qualcosa di ideale. L’idea è quella di uno smorzatore agganciato al cielo. Più precisamente si tratta di uno smorzatore inerziale collegato alla massa sospesa, in cui si prende come riferimento inerziale il cielo.
Questo tipo di algoritmo nasce dall’esigenza di ovviare ai limiti fisici imposti dalle sospensioni passive, in particolare al fatto che bisognerebbe minimizzare indici legati al comfort e alla tenuta di strada che, come visto in precedenza, presentano un minimo per valori diversi di smorzamento.
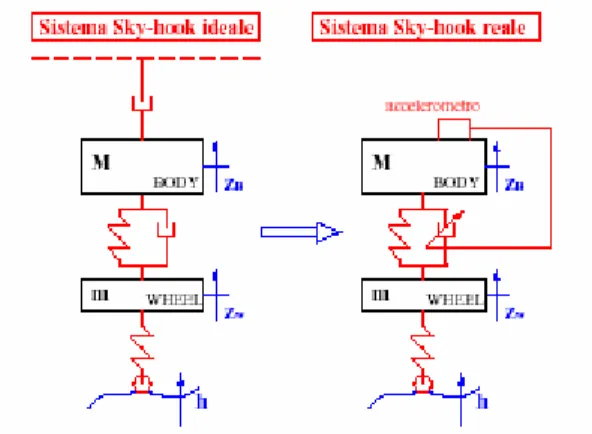
Questo ostacolo può essere superato immaginando un altro elemento capace di esercitare una forza. Si può pensare di abbassare il valore di smorzamento relativo (rispetto al valore ottimo) e introdurre nel controllo una funzione della velocità della massa sospesa, come mostrato in figura 1.4. Nella stessa viene anche schematizzato il sistema realizzativo di uno Sky Hook damper reale.
Figura 1.4: confronto tra uno schema di principio di uno Sky-Hook ideale
In letteratura è possibile reperire trattazioni analitiche anche molto complesse riguardanti il calcolo del coefficiente di smorzamento dello Sky-Hook [2].
Mi limito a fornire un risultato sintetico ma indicativo sulla risoluzione del problema.
La forza Fam che complessivamente lo smorzatore deve esercitare risulta
essere del tipo:
Con riferimento alla figura 1.4 zbe zw rappresentano rispettivamente lo
spostamento della massa sospesa e della ruota.
Avendo introdotto il coefficiente “Csky”, ovvero il coefficiente di
smorzamento associato allo Sky-Hook, ci sono ora due parametri da minimizzare ( il primo è il coefficiente associato alla sospensione passiva).
La forza smorzante è composta da un termine proporzionale alla velocità relativa vrel che dissipa solo energia, e dal termine attivo, che
può assumere valori non nulli anche quando la velocità relativa della sospensione è nulla dipendendo dalla velocità assoluta vass.
Ciò significa che l’attuatore deve essere capace di esercitare una forza, quindi di fornire un apporto energetico. Gli attuatori utilizzati risultano inoltre costosi e meno affidabili rispetto ai tradizionali ammortizzatori passivi. Questi fattori rappresentano ovviamente un limite all’impiego di strategie Sky-Hook ideali.
Tale limite viene superato su tutti i veicoli in commercio utilizzando tecniche di smorzamento semi-attivo.
1.4 Algoritmi di smorzamento semi-attivo
Le strategie usate attualmente sulla maggior parte dei veicoli non presentano la possibilità di fornire energia, ma stabiliscono il modo opportuno di dissiparla.
La forza esercitata dall’attuatore deve essere uguale a quella ottenuta con la strategia Sky-Hook, imponendo però la condizione che sia nulla nel momento in cui ci fosse la necessità di fornire energia.
Si ottiene una forza che, in accordo a quanto detto precedentemente, è esprimibile da una relazione del tipo:
Sono stati sviluppati diversi studi per ottimizzare i coefficienti, alcuni dal punto di vista analitico e altri basati sulla variazione dei parametri di controllo in funzione di dati raccolti direttamente sul veicolo e rielaborati per correggere il comportamento del veicolo stesso in determinate situazioni di percorrenza. Tra quelli analitici particolare rilevanza ricoprono quelli derivanti dalla soluzione dell’equazione di Riccati.
In realtà tutte queste strategie forniscono il valore della forza da applicare, che però dal punto di vista realizzativo diventa un dato non proprio sufficiente. Per superare questo inconveniente negli ultimi tempi si stanno facendo strada strategie di tipo soft-computing, ovvero strategie che portano a calcolare direttamente lo smorzamento necessario senza passare per un calcolo diretto, ma facendo riferimento a uno degli assetti previsti in fase di progetto.
Partendo da dati raccolti sul veicolo, tramite regole euristiche o dettate comunque da esperienze delle case costruttrici sul comportamento dei veicoli costruiti ed equipaggiati con sospensioni con caratteristiche diverse, vengono impostati alcuni valori di smorzamento che conferiscono al mezzo caratteristiche anche sensibilmente diverse.
Tutto ciò potrebbe portare ad una completa personalizzazione dell’assetto della propria moto in base alle esigenze del singolo pilota, o alla realizzazione di assetti particolarmente adatti a un singolo tracciato. Tutte queste strategie richiedono in fondo degli ammortizzatori che consentano di variare lo smorzamento, e denominati ammortizzatori semiattivi.
1.5 Ammortizzatori semiattivi
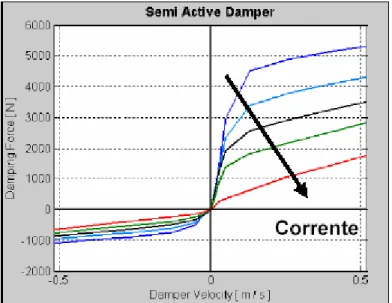
Gli ammortizzatori semiattivi consentono di variare lo smorzamento all’interno di una famiglia di curve in funzione della corrente di controllo.
Presentano una caratteristica del tipo riportato in figura 1.5.
Figura 1.5: caratteristica di un ammortizzatore a smorzamento variabile
È possibile distinguere tre tipi di ammortizzatori semiattivi, in base alla tipologia di fenomeno che regola la variazione del coefficiente di smorzamento:
• Ammortizzatori CDC (Continously Damping Control); • Ammortizzatori ER (elettrroreologici);
• Ammortizzatori MR ( magnetoreologici);
1.5.1 Gli ammortizzatori CDC
Il funzionamento degli ammortizzatori CDC è basato sulla variazione della dimensione degli orifizi che collegano la camera superiore e inferiore del pistone dell’ammortizzatore.
Viene fatta cambiare la velocità con cui la sospensione torna alla posizione di equilibrio.
Quando la sospensione viene sollecitata da un’asperità stradale l’olio viene forzato a passare nei fori presenti.
Riducendo la sezione di passaggio si genera una trasformazione del moto dell’olio da laminare a turbolento. In tal caso i vettori di velocità non sono più tutti orientati nella stessa direzione, assumono un andamento casuale che genera numerosi urti molecolari. Questo produce un aumento dell’attrito viscoso e una conseguente diminuzione della velocità di estensione e compressione della sospensione.
Viene fatta cambiare quindi la velocità con cui la sospensione torna alla posizione di equilibrio.
In questo modo cambia lo smorzamento dell’ammortizzatore stesso. In figura 1.6 è mostrata una sezione di un ammortizzatore di tipo CDC, ed è possibile notare un meccanismo per la variazione degli orifizi. Piú schematicamente l’ ammortizzatore CDC è invece mostrato in figura 1.7. In quest’ultima S rappresenta la superficie del pistone,
σ
l’area di un generico orifizio e w la velocità del pistone stesso.Il tempo di risposta dei CDC è di circa 30-40 ms. Il meccanismo che agisce sugli orifizi è pilotato da valvole solenoidi che richiedono correnti comprese tra 0 e 1,5 A. La potenza richiesta da questo tipo di ammortizzatori è stimata intorno ai 10 W.
Figura 1.6: sezione di un ammortizzatore di tipo CDC
Figura 1.7: schematizzazione del funzionamento di un
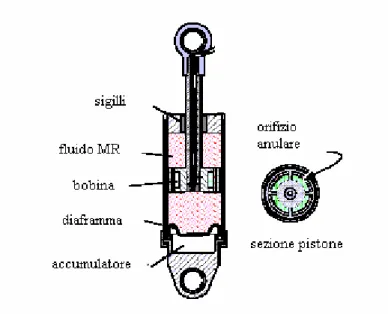
1.5.2 Gli ammortizzatori MR
Gli ammortizzatori MR utilizzano al loro interno dei fluidi di tipo magnetoreologico.
Questi materiali presentano una viscosità variabile in funzione del campo magnetico applicato.
In particolare le particelle vengono polarizzate formando delle catene parallele alle linee di campo, come mostrato in figura 1.8.
Questo fenomeno rende lo smorzamento dipendente dal campo magnetico.
In figura 1.7 viene mostrato una sezione di un ammortizzatore MR con i rispettivi elementi costitutivi, in particolare la parte responsabile dell’eccitazione del materiale magnetoreologico.
Figura 1.8: principio di polarizzazione delle particelle
di materiale magnetoreologico
1.5.3 Gli ammortizzatori ER
Gli ammortizzatori ER funzionano in modo analogo rispetto ai precedenti, utilizzando ovviamente materiali che possiedono il comportamento già descritto ma in funzione del campo elettrico.
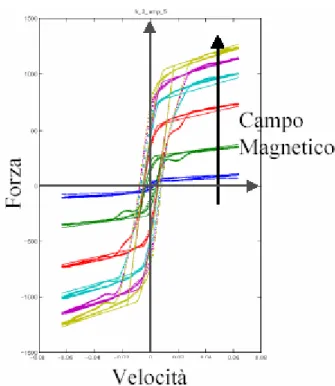
Gli ultimi due tipi di ammortizzatori descritti hanno dei tempi di risposta molto ridotti (circa 5 ms), ma presentano l’inconveniente di possedere una caratteristica simmetrica in compressione ed estensione, come indicato in figura 1.9. Tale caratteristica è anche rappresentativa per ammortizzatori di tipo MR, a cui fa espressamente riferimento.
Figura 1.9: caratteristica di un ammortizzatore MR nel caso specifico,ma
rappresentativa anche per un ammortizzatore ER
Eliminare il problema della contaminazione dei materiali ER e MR rappresenta oggi uno dei limiti sull’affidabilità di lungo periodo dei due tipi di ammortizzatore ora descritti, e li rende più costosi rispetto agli ammortizzatori CDC.