IL MOTORE AD EFFETTO HALL
2.1.Descrizione di un propulsore ad effetto Hall
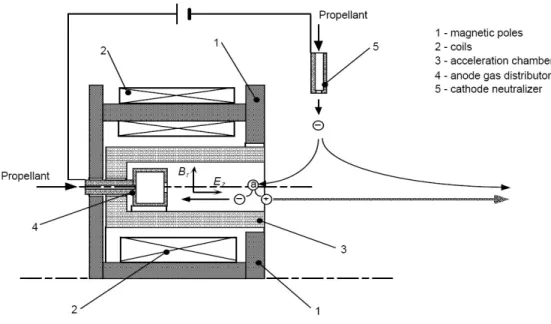
I propulsori ad effetto Hall basano il loro funzionamento sull’accelerazione di un fluido di lavoro grazie all’azione combinata di un campo magnetico e di un campo elettrico ad esso perpendicolare. Solitamente tali propulsori sono a simmetria cilindrica e i campi precedentemente descritti hanno direzione radiale (campo magnetico) ed assiale (campo elettrico).
Il campo magnetico è generato da un circuito magnetico opportuno creato da bobine in cui circola corrente elettrica in direzione azimutale e da opportuni elementi ferromagnetici. In alcuni casi vengono immessi anche dei magneti permanenti per indirizzare meglio le linee di flusso magnetiche.
Il campo elettrico invece è generato dalla differenza di potenziale applicata tra anodo (interno al motore) e catodo (esterno).
In generale il fluido di lavoro è lo Xenon poiché presenta le caratteristiche di elevata massa atomica (131 u.m.a.) e basso potenziale di prima ionizzazione, ma possono essere utilizzati anche Kripton ed Argon.
Esso viene immesso in un canale, detto di accelerazione, nel quale si ha, in principio, la ionizzazione e successivamente l’accelerazione del plasma. In realtà il procedimento descritto sopra è riconducibile al propulsore ad effetto Hall chiamato SPT, in quanto nell’altra tipologia di motore (TAL) i due fenomeni avvengono in un’unica zona. Tuttavia, per una corretta comprensione del funzionamento del motore da qui in avanti ci si riferirà alla configurazione SPT (Figura 2.1).
La ionizzazione è da imputarsi agli urti che avvengono tra il gas e gli elettroni eccitati dal campo magnetico applicato, mentre l’accelerazione degli ioni è dovuta
al potenziale elettrico generato tra catodo ed anodo e dovuto sia alla differenza di potenziale applicato sia al potenziale creatosi nella zona magnetizzata a causa della maggior resistività in direzione assiale del plasma.
Figura 2.1: Funzionamento e componenti principali di un motore ad effetto Hall SPT
Il catodo emette elettroni che vengono spinti, grazie al campo elettrico applicato, verso l’anodo. Quando raggiungono la zona in cui è presente il campo magnetico gli elettroni iniziano a muoversi in direzione azimutale aumentando la propria energia cinetica (10-100eV). All’interno del canale è però presente anche il gas neutro che, urtato dagli elettroni ad alta energia, si ionizza. Gli elettroni prodotti dalla ionizzazione seguono a loro volta la stessa sorte e contribuiscono loro stessi alla ionizzazione del gas. Infine gli elettroni raggiungeranno l’anodo chiudendo il circuito elettrico.
Invece gli ioni, a causa dell’elevato valore del raggio di ciclotrone vengono accelerati verso l’esterno dal potenziale elettrico con traiettoria pressoché rettilinea.
Poiché gli ioni non risentono della presenza del campo magnetico il processo accelerativo è di tipo elettrostatico e quindi il valore della velocità di scarico è proporzionale alla tensione di scarica come per i normali motori a ioni e vale
2 i D e i Z q V v m = (2.1)
Nella (2.1) il valore del potenziale elettrostatico di scarica VD è composto dal potenziale esterno applicato tra il catodo e l’anodo e il potenziale generato dall’aumento della resistività del plasma nella zona magnetizzata.
I principali vantaggi di un propulsore ad effetto Hall consistono essenzialmente:
• nell’efficacia del processo di ionizzazione del propellente. Esso è prodotto
dalla stessa corrente di scarica e quindi non c’è la necessità di dover aggiungere un opportuno elemento ionizzante.
• nell’assenza di limitazioni per effetto di carica dovuta al fatto che il fluido di
lavoro è globalmente neutro.
• nell’elevato rendimento di spinta (50-60%), che permette di raggiungere
valori dell’impulso specifico considerati ottimali per molte missioni in cui è vantaggioso l’uso della propulsione elettrica.
• nella mancanza di elettrodi immersi nel plasma e soggetti ad erosione e a
possibili perdite di isolamento elettrico.
Per una migliore comprensione del funzionamento dei propulsori ad effetto Hall di seguito vengono riportati alcuni fenomeni caratteristici:
• Influenza del campo magnetico • Ionizzazione del propellente
• Interazioni con le pareti dei canali di accelerazione
Infine, nell’ultimo Paragrafo, verrà introdotto il rendimento del propulsore e i fattori principali che lo influenzano.
2.2. Influenza del campo magnetico
Il campo magnetico è uno dei più importanti parametri intorno a cui dimensionare il propulsore.
Infatti, per il funzionamento di un propulsore ad effetto Hall dobbiamo garantire che la larghezza del canale di accelerazione sia molto più grande del raggio di Larmor degli elettroni e più piccola di quello degli ioni. In formule si ottengono le seguenti relazioni
( )
e L elettrone m v r b eB ⊥ = (2.2)( )
i L ione m v r b eB ⊥ = (2.3)La (2.2) fa sì che gli ioni vengano accelerati in maniera pressoché rettilinea dal campo elettrostatico, mentre la (2.3) è fondamentale per il caratteristico moto azimutale degli elettroni. Come osservato nel Paragrafo 2.1, gli elettroni iniziano a muoversi in direzione circonferenziale perdendo la loro componente assiale e, quindi, aumentando la loro resistività assiale. Tale fatto causa un aumento del potenziale tra catodo ed anodo
Dalla equazione (2.2) si nota subito che il raggio di Larmor è inversamente proporzionale al campo magnetico, quindi data la larghezza del canale di accelerazione, possiamo scegliere l’intensità del campo tale da rispettare i vincoli sopra riportati.
Approssimando la velocità v⊥ degli elettroni con quella termica media:
8 e e e kT c v m π ⊥ = ≈ (2.4)
dove: k costante di Boltzmann me massa dell’elettrone Te temperatura elettronica
( )
B T r e elettroni L ∝ (2.5)Poiché il raggio elettronico di Larmor dipende soltanto dalla forza del campo magnetico e dalla temperatura degli elettroni, allora l’equazione (2.2) può essere soddisfatta in un ampio intervallo di temperature elettroniche con piccole variazioni del valore del campo magnetico.
Inoltre, per il funzionamento del motore, è molto importante anche la topografia delle linee di flusso del campo magnetico nel canale di accelerazione. Vari studi [13,24,26] hanno scoperto che le caratteristiche di scarica dipendono essenzialmente da come la componente radiale del campo magnetico varia in direzione assiale e che, per evitare delle instabilità di flusso, si deve avere:
0
z rB
∇ > (2.6)
La relazione (2.6) deriva da studi teorici [13] e serve a smorzare le fluttuazioni di densità degli elettroni causate dall’attrito tra le varie parti della nuvola elettronica. le quali si muovono con velocità angolari diverse. Tali fluttuazioni sono conosciute come onde magnetofoniche di deriva [14].
Da questi studi si è scoperto che con voltaggi di scarica costanti e con un andamento della componente radiale del campo magnetico che rispetti la (2.6), il rapporto tra la corrente di ioni e quella di elettroni è approssimativamente il 90%, mentre con un gradiente relativamente piccolo o nullo il rapporto delle correnti è circa del 60%. Infine, dove il gradiente del campo magnetico è negativo, sono stati trovati rapporti delle correnti ioniche di scarica minori del 50%. Per queste ragioni è importante che lungo il canale di accelerazione il gradiente del campo magnetico sia positivo per massimizzare le prestazioni del propulsore. A causa di ciò il valore massimo del campo magnetico Bmax deve essere vicino al piano d’uscita del propulsore.
Un’altra caratteristica importante, legata alla topografia del campo magnetico, è la necessità di avere all’interno del canale di accelerazione le linee di flusso convesse verso l’anodo. Questa scelta progettuale consente la repulsione degli elettroni dalle pareti, diminuendo così le perdite energetiche. Infatti, se prendiamo la legge di Ohm generalizzata
1 1 i e j E u B p j B n e n e σ = + × + ∇ − × ⋅ ⋅ (2.7)
e la manipoliamo un po’ arriviamo a trovare che nelle condizioni di funzionamento del propulsore ad effetto Hall si ha
* 1 0 e E B E p B n e ⋅ = + ∇ ⋅ ≈ ⋅ (2.8)
La (2.8) ci porta a dire che lungo una linea di forza del campo magnetico si ha la seguente proprietà 1 0 e dp d ds n e ds φ + = ⋅ (2.9)
Poiché pe =nKTe arriviamo a definire il potenziale termalizzato φT come
0 ln e e T e KT n e n φ = −φ (2.10)
che rimane costante sulle linee di forza magnetiche. Questo significa che, a meno di un fattore KTe
e , le linee di forza magnetiche corrispondono alle linee equipotenziali; dunque, laddove la temperatura elettronica è bassa, gli ioni vengono accelerati in direzione ortogonale alle linee di flusso magnetico.
Un’ulteriore caratteristica legata alla topografia delle linee di flusso molto importante per il rendimento del propulsore è il grado di simmetria che le stesse hanno all’interno del canale. Infatti si è scoperto [25] che, per avere il funzionamento ottimale del propulsore, si deve avere una configurazione delle linee di flusso simmetrica rispetto alla linea centrale della camera di accelerazione: tale disposizione crea una zona di massima accelerazione del propellente nel centro del canale, diminuendo così le perdite legate alla divergenza del fascio.
2.3. Ionizzazione del gas
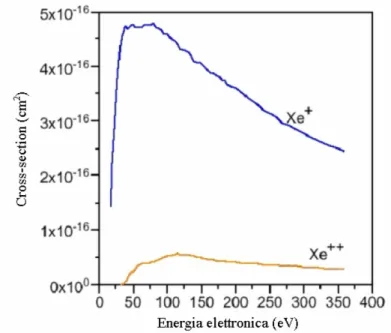
Come abbiamo visto in precedenza il processo accelerativo del gas è causato dalle forze elettrostatiche applicate. Poiché il gas in ingresso è neutro, per avere un buon rendimento del motore è necessario che il processo di ionizzazione sia efficace. Solitamente in un motore ad effetto Hall si usa come propellente lo Xenon a causa del suo basso valore dell’energia di prima ionizzazione e il cui processo di ionizzazione può essere espresso come
2
Xe e+ − Xe++ e− (2.11)
è da notarsi che viene preso in considerazione soltanto il processo di prima ionizzazione del gas.
Con il termine ionizzazione si intende una serie di processi molto complicati, che hanno l’effetto di separare dalla particella neutra uno o più elettroni. Tale processo è innescato da fenomeni collisionali tra particelle cariche ad elevata energia interna e gli atomi neutri del gas.
Il numero di ioni prodotti nell’unità di tempo e nello spazio delle velocità può essere espresso [7,8]
( ) ( )
ione a e i
R g = ⋅ ⋅ ⋅n n g σ g dg⋅ (2.12)
dove na è la densità di neutri, ne la densità di elettroni, g la velocità relativa di collisione e ( )σi g la sezione d’urto relativa ad una collisione neutro-elettrone. La velocità di ionizzazione totale verrà ricavata dall’integrazione su tutto lo spazio delle velocità relative di collisione e si trova che per motori ad effetto Hall tipici ha una dipendenza del tipo:
3 2
ione a e e
R n n T⋅ ⋅ (2.13)
Infine introduciamo due parametri che discendono direttamente dallo studio dei processi di ionizzazione e che sono importanti per la progettazione di un motore ad effetto Hall.
Ipotizzando che le particelle neutre mantengano per tutta la lunghezza del canale la loro velocità di immissione (u ) e trascurando i termini di ricombinazione az possiamo definire la lunghezza di ionizzazione
cos az i i e a u L t v n σ = = < > ⋅ (2.14)
Tale grandezza rappresenta la lunghezza di scala del processo e, affinché la ionizzazione si possa considerare completa, essa deve essere una piccola frazione della lunghezza del canale. Definiamo quindi un parametro di scala
3 2 1 i az i a e L u L n L T λ = ⋅ ⋅ (2.15)
Riportiamo in Figura 2.3 l’andamento di σi ev in funzione della temperatura elettronica.
Per la propria natura collisionale, la ionizzazione ha associato un costo energetico. Piliero e Battista hanno espresso tale costo con una relazione in funzione della portata del propellente [8]
p ion ion m E P M = (2.16)
dove E è circa 2-3 volte l’energia di prima ionizzazione del gas . ion
2.4. Interazioni con la parete
Un plasma ha la particolarità di essere una miscela quasi-neutra: questo significa che se si ha la comparsa di zone elettricamente cariche assisteremo alla nascita di campi elettrostatici locali tali da ristabilire la neutralità.
Tali variazioni di carica possono avvenire in regioni di spazio dalla lunghezza caratteristica, detta lunghezza di Debye:
0 2 D k T n e ε λ = ⋅ ⋅ ⋅ (2.17)
dove con ε0 si indica la permettitività dielettrica del vuoto.
Questa situazione si verifica in prossimità delle pareti della camera di accelerazione e dell’anodo ed è causata dalla maggior mobilità degli elettroni rispetto agli ioni. Ciò comporta che le pareti si carichino negativamente, mentre il plasma rimane caricato positivamente; con la comparsa di un campo elettrostatico tendente ad accelerare gli ioni verso le pareti per ristabilire la quasi-neutralità.
La zona interessata da questo fenomeno è dell’ordine di alcune lunghezze di Debye e viene chiamata guaina (sheath). La guaina è una vera e propria barriera di potenziale che confina la maggior parte degli elettroni all’interno del plasma: soltanto le particelle con elevata energia interna riescono a superare il potenziale creato dalla guaina e a collidere con le pareti, avendo perso parte della loro energia nel superare la barriera di potenziale.
In Figura 2.4 e in Figura 2.5 è riportata schematicamente la situazione descritta.
Figura 2.3: Andamento del potenziale elettrico in prossimità delle pareti
Dalla Figura 2.5 si nota che nella guaina non si ha la presenza di elettroni mentre il loro numero diventa apprezzabile nella zona confinante, chiamata pre-guaina (pre-sheath) in cui si ha comunque ancora la presenza di campi elettrostatici.
La densità degli ioni è più alta di quella degli elettroni in prossimità delle pareti per effetto del campo elettrico negativo associato con il flusso di elettroni che sfuggono verso di esse.
La conduzione degli elettroni verso le pareti della camera di accelerazione rappresenta il principale meccanismo di perdita energetica, il quale influisce, attraverso una riduzione del potenziale di accelerazione degli ioni, sul rendimento del propulsore. Nel tentativo di quantificare la potenza perduta è necessario studiare il fenomeno dell’emissione secondaria di elettroni da parte del materiale delle pareti.
Durante il funzionamento del motore le varie specie presenti nel plasma possono entrare in collisione con le pareti. Nel caso degli atomi neutri, essi verranno riflessi in maniera diffusa nel flusso principale. Se la particella è uno ione, esso verrà neutralizzato al contatto con la parete e riemesso come neutro. Infine, se ad urtare la parete è un elettrone, questo innescherà la cosiddetta emissione secondaria. Tale fenomeno è particolarmente evidente nei materiali isolanti utilizzati negli SPTs (Nitruro di Boro, Alumina, Silice,…) e vede l’elettrone impattare la parete strappando da essa un altro elettrone, a volte appartenente agli strati meno superficiali e sempre con un contenuto energetico inferiore. Nella Figura 2.6 si riporta la caratteristica struttura di una curva di produzione di elettroni secondari in cui si è indicato con
I
E energia alla quale la produzione di elettroni secondari eccede l’unità
max
E energia per cui si raggiunge il massimo della produzione di elettroni secondari
II
E energia per cui la produzione torna ad essere inferiore all’unità
max
Figura 2.5: Andamento caratteristico della curva di produzione degli elettroni secondari
Nella Tabella 2.1sono riportati idati sull’emissione secondaria di alcuni materiali. L’incompletezza dei dati su E è dovuta alla limitata energia disponibile nei test. II
In genere il massimo del coefficiente di emissione secondaria degli isolanti è molto più alto di quello dei metalli e dei semiconduttori.
La produzione di elettroni secondari è influenzata da molteplici fattori tra cui anche lo stato superficiale delle pareti e la sua influenza sulle prestazioni del propulsore è di notevole complessità.
In primo luogo la produzione di elettroni da parte delle pareti abbassa la barriera di potenziale della guaina, permettendo ad un numero maggiore di elettroni di oltrepassarla raggiungendo quindi la parete. Inoltre gli elettroni emessi, a causa della loro bassa energia interna, non contribuiscono alla ionizzazione del gas. La perdita energetica da attribuire a tale fenomeno è dell’ordine del 10%. Ne consegue che per ottenere un miglioramento del rendimento il materiale utilizzato dovrà possedere un coefficiente di emissione secondaria basso e un elevato valore di E . I In realtà sono stati trovati anche dei vantaggi nella produzione di elettroni secondari: essi infatti alimentano gran parte della corrente di ionizzazione ed inoltre tendono a stabilizzare la scarica.
A conclusione del presente paragrafo introduciamo un parametro importante per quanto riguarda la scalatura dei propulsori ad effetto Hall. Esso riguarda la potenza persa sulle pareti e si può esprimere come
(
)
1 2 * 3 2 2 1 e i W e m S kT n m P kT πd L δ = ⋅ ⋅ ⋅ ⋅Ψ − (2.18)dove si è indicato con
W
P la potenza persa alle pareti
*
s
δ emissione secondaria limite
Ψ funzione di forma
La (2.18), per i processi di scalatura, può essere espressa
3 3
2 2
W e W e m
2.5. Rendimento di un propulsore ad effetto Hall
In questo paragrafo tratteremo dei vari fattori di perdita di un HET i quali vanno ad incidere sul rendimento complessivo del propulsore. Come sostengono molti autori [7] il rendimento può essere espresso come
T ε J m ϕ v
η = ⋅ ⋅ ⋅ ⋅ η η η η η (2.20)
dove i vari termini esplicitati si possono scrivere
2 2 i i D m u eV ε η = (2.21)
dove con m e i u sono rispettivamente la massa e la velocità media della i particella ionica. La (2.21) rappresenta il rendimento del meccanismo di trasferimento di energia, essendo il rapporto tra l’energia cinetica media e l’energia che lo ione acquisterebbe dal campo elettrostatico con differenza di potenziale V D se non vi fossero perdite dovute alla guaina all’anodo e al potenziale residuo del plasma all’uscita del canale.
i J D J J η = (2.22)
detta anche rendimento di corrente e che rappresenta la frazione di corrente elettrica che effettivamente entra in gioco nell’accelerazione degli ioni.
i m p m m η = (2.23)
Questo termine è indicato anche come rendimento di massa ed indica la percentuale del gas che effettivamente viene ionizzato.
2 2 2 cos iz i u u ϕ η ≈ ϕ ≈ (2.24)
in cui si è indicato con u e iz u rispettivamente la media della componente i assiale della velocità e la velocità media della particella ionica.
La (2.24) è detta anche efficienza di divergenza del fascio ed indica quanta parte di energia non partecipa alla spinta assiale nel motore. La causa principale di questo fenomeno è da attribuirsi alle collisioni tra atomi neutri e ioni nella zona di uscita, con questi ultimi che perdono molto della loro energia così da essere più sensibili alla presenza di campi elettrici radiali [8].
Infine abbiamo l’ultimo termine
2 2 i v i u u η ≈ (2.25)
detto anche efficienza di dispersione di velocità che indica quanto è attendibile il termine legato alla media delle energie delle singole particelle.
In conclusione del paragrafo inseriamo i valori tipici delle varie efficienze:
• ηε ≈0.8 • ηJ ≈0.7 0.8÷ • ηm ≈0.8 • 0.9 0.8 ϕ η ≈ 10 100 sub kW kW − ÷ • ηv ≈0.9