2.
IL MOTORE AD EFFETTO HALL
2.1 Moto delle particelle cariche in campi elettrici e magnetici
Per comprendere il comportamento del plasma all’interno di un motore ad effetto Hall, è necessario per prima cosa comprendere il comportamento di una particella carica sotto l’influenza di un campo magnetico e di un campo elettrico. Questa analisi sarà basata sull’equazione di Lorentz:
[
E w B]
q
F = + ∧ (2-1)
dove F è la forza esercitata sulla particella, con carica q e velocità w, dal campo elettrico E e dal campo magnetico B. Trascurando gli effetti relativistici, questa equazione descrive il moto di una particella carica isolata dovuto al campo elettrico e magnetico in un sistema di riferimento inerziale. I paragrafi successivi faranno riferimento ad una particella carica in campi uniformi.
2.1.1 Moto di una particella in un campo elettrico uniforme: B = 0 Il più semplice caso da considerare è quello di una particella di massa
m in un campo elettrico costante e uniforme. In questo caso, l’equazione di
E q dt w d m = (2-2)
dalla quale si ottiene le seguenti espressioni per la velocità e per lo spostamento: 0 2 0 ( ) ( ) 2 q w t Et w m q r t Et w t r m = + = + + (2-3)
dove w0 e r0 indicano rispettivamente la velocità e la posizione iniziale della particella. Se la particella non urta con altre particelle, essa accelererà indefinitamente nella direzione del campo elettrico con il verso dipendente dalla polarità della carica.
2.1.2 Moto di una particella in un campo magnetico uniforme: E = 0 Nel caso in cui il campo elettrico è ovunque nullo e il campo magnetico è costante ed uniforme, l’equazione del moto di una particella carica si ricava direttamente dalla (2-1):
B w q dt w d m = ∧ (2-4)
Il campo magnetico non fa lavoro sulla particella e l’energia cinetica della particella è costante poiché il membro di destra dell’equazione (2-4) è ortogonale al campo magnetico B. Per la soluzione dell’equazione (2-4)
conviene separare la velocità in due componenti: una parallela (w//) e l’altra perpendicolare (w⊥) a B; si ottiene così:
(
w B w B)
m q dt w d dt w d + = ∧ + ∧ ⊥ ⊥ // // (2-5)Si osserva che il primo addendo del membro di destra è zero quindi posso scrivere: B w m q dt w d dt w d ∧ = = ⊥ ⊥ 0 // (2-6)
La (2-6)1 indica che la componente della velocità parallela B è costante ed
uguale al valore iniziale w//0 .La (2-6)2 rappresenta il moto normale al campo
magnetico. Poiché l’energia cinetica è costante, l’intensità di w è anch’essa
costante.
Se consideriamo un sistema di coordinate cartesiane con il campo magnetico diretto secondo l’asse Z, le componenti dell’equazione (2-6)2 sono
vincolate al piano X-Y. Dopo aver calcolato i prodotti vettoriali le componenti della velocità lungo X e lungo Y sono:
y x w m qB dt dw = (2-7) x y w m qB dt dw − = (2-8)
La soluzione di queste equazioni differenziali lineari ordinarie definisce un moto circolare: ) cos(ω +α =w⊥ t wx (2-9) ) sin(ω +α = w⊥ t wy ∓ (2-10)
dove α è l’angolo di fase dipendente dalle condizioni iniziali. Il segno negativo dell’equazione (2-9) corrisponde al caso in cui la carica della particella è positiva (q > 0) mentre il segno positivo corrisponde al caso in cui la carica della particella è negativa (q < 0). La frequenza del moto ω è
chiamata frequenza di ciclotrone, o girofrequenza, o frequenza di Larmor della particella ed è definita dall’equazione:
B m
q
=
ω (2-11)
Il raggio del moto circolare rL, anche noto come raggio di Larmor o raggio di
ciclotrone della molecola, è determinato dal rapporto della velocità w⊥ e la frequenza ω: B q mw w rL = ⊥ = ⊥ ω (2-12)
Il senso di rotazione è orario rispetto alle linee del campo magnetico se la particella è carica positivamente, e antiorario se la particella è caricata negativamente. Quindi il moto delle particelle sul piano ortogonale al campo magnetico è circolare uniforme con velocità angolare ω. Tale moto è detto
moto di ciclotrone e il centro di rotazione è chiamato centro di guida..
Quindi considerando il moto nella direzione del campo magnetico e quello nel piano ortogonale si osserva che il moto complessivo della particella è elicoidale con velocità assiale w//0 e con il senso della rotazione dipendente dalla carica della particella.
In un plasma reale dove avvengono collisioni tra le particelle è importante definire un parametro di riferimento per il moto reale della particella chiamato parametro di Hall. Le collisioni disturbano il moto elicoidale della particella. Il parametro di Hall β è il rapporto della frequenza di Larmor rispetto alla frequenza di collisione νc:
c
ν ω
β = (2-13)
Il parametro di Hall è una misura di quante oscillazioni avvengono intorno al campo magnetico durante il tempo caratteristico assente da collisioni. Il parametro di Hall, come la frequenza e il raggio di Larmor, varia con la
massa, la carica e la temperatura delle particelle (tramite la frequenza di collisione).
2.1.3 Moto di una particella in campi uniformi : E ≠ 0, B ≠ 0
Dopo aver discusso i due casi limite, viene esaminato in questo paragrafo il caso generale di una particella carica soggetta contemporaneamente a campi elettrici e campi magnetici. In questo caso la soluzione è facilitata se si considera sia E che w come somma di due componenti, il primo parallelo e il secondo normale a B, cioè:
E = E// + E⊥
w = w// + w⊥
per cui l’equazione (2-1) diventa:
(
E E w B w B)
m q dt w dt w d + = + + ∧ + ∧ ⊥ ⊥ ⊥ // // // (2-14)dove w// ∧ B=0. Quindi La (2-14) dà luogo a due equazioni che possono essere risolte separatamente:
// // E m q dt w d = (2-15)
(
E w B)
m q dt w d = + ∧ ⊥ ⊥ ⊥ (2-16)Consideriamo un sistema di coordinate Cartesiane in modo tale che il campo magnetico sia allineato con l’asse Z. L’equazione (2-15) fornisce un moto equivalente a quello del caso B = 0 analizzato nel paragrafo 2.1.1: nella direzione del campo magnetico, la molecola ha un moto uniformemente accelerato, con accelerazione proporzionale alla componente del campo
elettrico parallela a B. L’equazione (2-16) può essere risolta riducendola alle due equazioni componenti del moto per l’asse X e l’asse Y:
(
E w B)
m q dt dw y x x = + (2-17)(
E w B)
m q dt dw x y y = − (2-18)Il sistema di equazioni differenziali lineari ordinarie non omogenee ottenuto sopra può essere risolto per le componenti della velocità lungo l’asse X e l’asse Y:
(
)
B E t w wx = ⊥cosω +α + y (2-19)(
)
B E t w w x y =∓ ⊥sin ω +α − (2-20)dove il segno negativo della (2-20) si riferisce al caso di una particella caricata negativamente e il segno positivo ad una particella caricata positivamente.
Queste equazioni di moto sono simili a quelle dell’equazioni (2-9) e (2-10) con l’eccezione del termine finale al secondo membro di entrambe l’equazioni. Questo termine corrisponde alla deriva associata con il moto di una particella carica in una regione dello spazio contenete un campo elettrico incrociato con un campo magnetico. Una relazione vettoriale per questa deriva può essere estrapolata dall’equazione (2-1):
[
E+w∧B]
⊥ =0 (2-21)questa relazione si ottiene perché l’energia si conserva nel piano X-Y. Se si considera il prodotto vettoriale della relazione sopra con il campo magnetico, è possibile determinare la velocità di deriva dovuta al campo elettrico del centro di rotazione:
[
E+w∧B]
∧B=E∧B−B2w+(
w⋅B)
B=0(2-22)
dove la designazione della componente trasversale è stata rimossa per semplificare la notazione. La parte trasversale dell’equazione precedente fornisce un’espressione per la velocità di deriva ud :
2 B
B E
ud = ∧ (2-23)
Il caso particolare in cui il campo magnetico e il campo elettrico sono ortogonali è rappresentato in Figura 2-1. In essa si mostra il comportamento di una particella carica positivamente e quello di una particella carica negativamente.
E’ importante osservare che la velocità di deriva non dipende né da q, né da m, né da w⊥ ed è normale al piano contente i vettori E e B. Nella prima metà del ciclo di un’orbita di una particella carica positivamente, la particella guadagna energia dal campo elettrico e incrementa w⊥ e quindi anche rL. Nella seconda metà del ciclo, lo ione positivo perde energia a causa del campo elettrico e quindi w⊥ e rL diminuiscono. La differenza nel raggio di Larmor sul lato superiore e su quello inferiore dell’orbita causa la velocità di deriva ud. Una particella caricata negativamente ruota nella direzione opposta , ma anch’essa guadagna energia in questa direzione. Il risultato è che le particelle cariche derivano nella stessa direzione senza considerare la polarizzazione. Per particelle di uguale carica, quelle più leggere avranno un raggio di Larmor più piccolo e quindi deriveranno meno per ciclo, tuttavia la frequenza di Larmor ω sarà più alta.
Figura 2-1 Raggio di Larmor e velocità di deriva per particelle di carica negativa e positiva
Quindi, riassumendo, il moto complessivo della particella è dato dalla sovrapposizione del moto di ciclotrone e del moto rettilineo uniforme con velocità ud :la particella ha quindi una traiettoria cicloidale. A questo moto cicloidale si sovrappone, ovviamente, il moto accelerato descritto dall’equazione (2-15) nella direzione del campo magnetico. In generale, quindi, la velocità della particella carica in un campo elettromagnetico uniforme può essere espressa dalla seguente relazione:
⎥⎦ ⎤ ⎢⎣ ⎡ ∧ + + + ∧ = 2 E//t w//0 m q B B E r w ω L (2-24)
2.2 Descrizione del propulsore ad effetto Hall
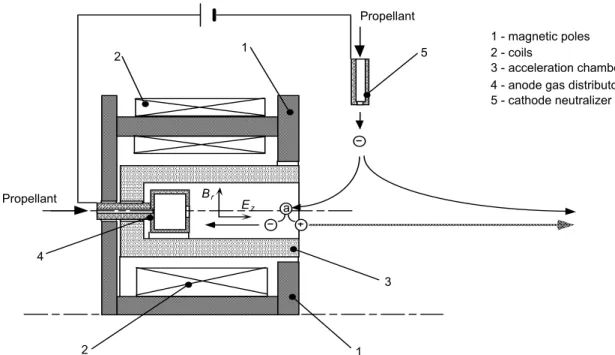
I propulsori ad effetto Hall basano il loro principio di funzionamento sull’accelerazione di un fluido di lavoro opportunamente ionizzato da parte della mutua azione della sovrapposizione di un campo magnetico e di un campo elettrico ortogonali tra loro e diretti rispettivamente radialmente e lungo l’asse del propulsore solitamente realizzato con simmetria cilindrica (Figura 2-2). Il gas generalmente utilizzato è Xenon in virtù delle sue caratteristiche di elevata massa atomica e basso potenziale di ionizzazione, ma anche altri gas nobili come Argon e Krypton possono essere utilizzati come propellenti.
Il campo magnetico viene generato da un opportuno circuito magnetico costituito da bobine percorse da corrente elettrica e da elementi ferromagnetici per indirizzare le linee del campo nella zona di introduzione del propellente; il campo elettrico invece viene inizialmente generato dalla differenza di potenziale mantenuta tra un elettrodo esterno al motore (catodo), polarizzato negativamente, e un elettrodo positivo interno al motore (anodo).
1 1 2 2 5 3 4 1 - magnetic poles 2 - coils 3 - acceleration chamber 4 - anode gas distributor 5 - cathode neutralizer Propellant a Br Ez Propellant
Una corrente elettronica viene emessa dal catodo in modo che fluisca in modo pressoché assiale verso l’anodo. Quando gli elettroni penetrano all’interno del motore e risentono del campo magnetico radiale rimangono intrappolati nella zona di massima intensità del campo magnetico, che annulla praticamente il loro moto verso l’anodo a causa del piccolo raggio di ciclotrone degli elettroni e impartisce loro invece una velocità azimutale (ortogonale al campo magnetico e al campo elettrico), creando così per effetto Hall una corrente elettronica circonferenziale all’interno del propulsore. Questa scarica costituita da una elevata densità di elettroni ad elevata energia (tipicamente 10÷100eV) permette la ionizzazione del propellente, generalmente iniettato nel motore attraverso una camera di distribuzione anulare costituita dallo stesso anodo, mediante l’urto degli elettroni con gli atomi neutri del gas di lavoro. Inoltre la distribuzione di elettroni nella scarica produce un effetto di carica spaziale negativa (“catodo virtuale”) che genera una differenza di potenziale con l’anodo permettendo l’accelerazione degli ioni prodotti. Per questo motivo i propulsori ad effetto Hall sono stati anche definiti come motori a ioni senza griglia. Come per i motori a ioni, la velocità degli ioni sarà proporzionale alla radice quadrata del potenziale di scarica, Vd, secondo l’equazione: 2 i d i i ZqV v m = (2-25)
dove Z è lo stato di ionizzazione della particella.
Gli ioni accelerati dalla differenza di potenziale non risentono dell’azione del campo magnetico poiché per la loro elevata massa atomica presentano un grande raggio di ciclotrone e quindi percorrono traiettorie pressoché rettilinee dirette prevalentemente lungo l’asse del motore.
Gli elettroni creati nella ionizzazione del propellente contribuiscono ad alimentare la corrente azimutale e quindi a mantenere il funzionamento del motore, presentando un moto di deriva verso l’anodo per la presenza del campo elettrico a causa degli urti con gli atomi neutri. Una volta raccolti dall’anodo questi elettroni sono di nuovo forniti al catodo esterno attraverso un opportuno generatore di tensione, ed emessi in modo da mantenere la
I principali vantaggi di un propulsore ad effetto Hall consistono essenzialmente:
- nell’efficacia del processo di ionizzazione del propellente, prodotto dalla stessa corrente di scarica, senza la necessità di introdurre un opportuno elemento di ionizzazione (come invece avviene nei propulsori elettrostatici) che ridurrebbe il rendimento del motore; - nella pressoché totale neutralità del plasma prodotto all’interno del
propulsore, che quindi nonostante utilizzi in definitiva un processo accelerativo elettrostatico (come spesso viene classificato, a dispetto della presenza di un campo magnetico) non presenta nessuna limitazione per effetto di carica spaziale come i normali propulsori elettrostatici;
- i livelli di potenza disponibili a bordo dei satelliti, e l’elevato rendimento di spinta di questi motori (intorno al 50÷60%) permettono di ottenere impulsi specifici dell’ordine di 2000-3000 secondi, considerati ottimali per molte missioni in cui è vantaggioso l’uso della propulsione elettrica;
- mancanza di elettrodi immersi nel plasma soggetti a erosione e a possibili perdite di isolamento elettrico.
Questi punti di forza della propulsione a effetto Hall rispetto a quella elettrotermica, elettrostatica classica e magnetoplasmadinamica unitamente alla maturità della tecnologia di costruzione di questi motori, mettono i motori ad effetto Hall in una posizione privilegiata per le future applicazioni.
2.3 Influenza del campo magnetico
Il campo magnetico è il parametro più importante nella progettazione di un propulsore Hall.
La cattura degli elettroni in un propulsore Hall dipende dal raggio di Larmor definito nell’equazione (2-12). Infatti per vincolare gli elettroni e permettere agli ioni di essere accelerati dal campo elettrico dentro il propulsore è necessario che il raggio elettronico di Larmor sia più piccolo della larghezza del canale di accelerazione. Al contrario, il raggio ionico di Larmor deve essere significativamente più grande, in modo che il campo
magnetico non influenzi la traiettoria degli ioni mentre questi accelerano sotto l’azione del campo elettrico assiale
W rL)ione >> ( (2-26) W rL)elettrone << ( (2-27)
dove W è la larghezza del canale di accelerazione (in senso radiale per un propulsore a simmetria assiale).
Se approssimiamo la velocità w⊥ con la velocità termica media degli elettroni e c : e e e c m kT w⊥ ≈ = π 8 (2-28)
la relazione tra i parametri che determinano il raggio elettronico di Larmor si riduce ad una funzione della temperatura degli elettroni Te e del campo magnetico radiale B : B T r e elettroni L) ∝ ( (2-29)
Poiché il raggio elettronico di Larmor dipende soltanto dal campo magnetico e dalla temperatura degli elettroni, allora l’equazione (2-26) può essere soddisfatta in un ampio intervallo di temperature elettroniche con piccole variazioni del campo magnetico.
Ad eccezione della ionizzazione per impatto con gli elettroni, il flusso dentro il canale di accelerazione è senza collisioni. La ionizzazione per collisione tra un elettrone e un neutro determina un limite inferiore per la temperatura elettronica richiesta, equivalente approssimativamente al potenziale di ionizzazione del propellente. Per soddisfare la disuguaglianza dell’equazione (2-26) è molto importante considerare anche la massa del gas utilizzato come propellente (poiché il raggio di Larmor è proporzionale alla massa della particella carica), e per questo motivo lo Xenon (131 amu) è
Le equazioni (2-26) e (2-27) determinano anche il profilo del campo magnetico radiale. La profondità della regione di ionizzazione D (in senso assiale per un propulsore assialsimmetrico) deve soddisfare queste disuguaglianze per assicurare che gli elettroni siano contenuti nella regione di ionizzazione e deve valere:
D ∼ W (2-30)
La parte di propellente che non è ionizzata non contribuisce significativamente alla produzione di spinta, quindi si deve assicurare che la maggior parte dei neutri sia ionizzata. Possiamo assumere che i neutri raggiungano la regione di ionizzazione con una velocità vn. Affinché la
maggioranza dei neutri sia ionizzata nella profondità caratteristica della zona di ionizzazione D, il rateo di collisione degli elettroni-neutri Rione deve essere grande; condizione equivalente alla precedente è che la distanza percorsa da un neutro tra due collisioni successive sia molto minore della profondità caratteristica della zona di ionizzazione:
ione N
R v
D>> (2-31)
Un limite importante all’efficienza del propulsore ad effetto Hall è la grandezza della corrente elettronica assiale; per limitare questo meccanismo di perdita, l’anodo è posto lontano dalle zone di alta densità elettronica dove il campo magnetico vincola gli elettroni.
I circuiti magnetici usuali produco profili del campo magnetico radiale somiglianti a funzioni di Gauss. Gli effetti della struttura del campo magnetico sono stati esaminati sperimentalmente da Morozov il quale mostrò che il profilo del campo magnetico radiale ha una forte influenza nelle prestazioni di un propulsore Hall. Con voltaggi di scarica costanti, il rapporto tra la corrente di ioni e quella di elettroni è approssimativamente il 90% quando il campo magnetico ha un gradiente positivo attraverso il canale di accelerazione ed è quindi monotono crescente verso l’uscita del motore. Con un gradiente relativamente piccolo o nullo,invece, il rapporto delle correnti è circa del 60% e dove il gradiente del campo magnetico è negativo sono stati
trovati rapporti delle correnti ioniche di scarica minori del 50%. Per queste ragioni è importante che il gradiente del campo magnetico sia positivo attraverso il canale di accelerazione per massimizzare le prestazioni del propulsore. Per questo motivo il massimo del campo magnetico Bmax deve
essere vicino al piano d’uscita del propulsore (Figura 2-3).
Figura 2-3 Andamento qualitativo del campo magnetico nel propulsore.
Di seguito (Figura 2-4) sono riportati i profili assiali all’interno della camera di accelerazione dei parametri di scarica calcolati con un modello numerico per un motore SPT da 5 kW; in particolare sono mostrati: il rapporto tra l’intensità del campo magnetico locale e il suo valore massimo (b), il grado di ionizzazione (ηi), il potenziale (Φ), la densità elettronica (ne),
Figura 2-4 Profili assiali dei parametri di scarica per un motore SPT da 5 kW.
2.4 Processo di ionizzazione
L’incremento di energia necessaria per la ionizzazione del propellente si ottiene per mezzo di un urto anelastico tra un elettrone ed un atomo di gas secondo la relazione :
e Z e
Z+ ⇔ ++2
Il rateo di ionizzazione, Rione, per effetto della collisione neutro-elettrone è data dalla relazione (2-32):
dg g gQ n n g Rione( )= N e Ne( ) (2-32)
dove g è la velocità relativa di collisione, nN è la densità di neutri, ne è la densità di elettroni e QNe(g) è la cross-section per la collisione neutro-elettrone per un particolare valore di g. Ovviamente per ottenere il rateo di ionizzazione totale sarà necessario integrare su tutte le possibile velocità di collisione relative g. In Figura 2-5 è stato riportato l’andamento della
cross-section per la collisione neutro-elettrone al variare dell’energia degli elettroni
che impattano con l’atomo. Si osserva che per atomi singolarmente ionizzati la ionizzazione per unità di area cresce da zero, con un valore di energia di 12eV, fino a raggiungere un massimo, in corrispondenza di un energia di 50 eV.
Per trovare la dipendenza funzionale tra il rateo di ionizzazione e la temperatura elettronica, si può ipotizzare di considerare i neutri fermi rispetto agli elettroni e approssimare la velocità relativa g con la velocità termica degli elettroni data in (2-28), ottenendo:
Rione∼ nN ne Te1.5 (2-33)
Questa equazione evidenzia che quando la densità di neutri diminuisce, si può compensare o incrementare la velocità di ionizzazione dentro il propulsore ad effetto Hall con incrementi della temperatura elettronica.
La parte di propellente che non viene ionizzata, non contribuisce alla spinta del propulsore. Affinché quest’ultimo funzioni in modo efficiente è quindi necessario che gli elettroni ionizzino il maggior numero possibile di neutri; per fare ciò è necessario ridurre il cammino libero medio degli elettroni λm che rappresenta la distanza percorsa dall’elettrone senza urto,
dopo la quale esiste una buona probabilità di collidere con un atomo o uno ione.