Sommario
Mauro Turturici – Electronic Goalkeeper: studio e progettazione di un ausilio al gioco del Calcio per
persone diversamente abili
2
Sommario
Indice di figure e tabelle ... 4
Introduzione ... 8
Nascita ed obiettivi del progetto El.Go. ... 9
Organizzazione dell’elaborato ... 10
1. Diversabilità, sport e tecnologie di ausilio ... 12
1.1. Diversabilità ieri e oggi... 12
1.1.1. Breve storia delle tematiche legate alla diversabilità ... 12
1.2. Lo sport e i diversamente abili... 14
1.2.1. Il Calcio e i diversamente abili ... 15
1.3. La tecnologia elettronica al servizio degli utenti diversamente abili... 15
1.3.1. Interfacce utente dedicate ... 16
1.3.2. Interfacce di potenziale utilizzo nel sistema ... 22
1.4. L’elettronica applicata al Calcio: portieri automatici ... 22
1.4.1. Goalias ... 22
1.4.2. Robokeeper... 23
2. Analisi e definizione dei requisiti ... 25
2.1. Il ruolo del portiere nel gioco del Calcio ... 26
2.2. Il tuffo ed il piazzamento... 27
2.3. Le dinamiche del tiro in porta ... 30
2.4. Esigenze legate all’utenza... 36
2.5. Modalità di funzionamento del sistema ... 39
2.6. Valutazione di parametri per adattare la giocabilità ... 40
2.7. Aspetti relativi alla sicurezza ... 40
2.8. Altre considerazioni ... 41
2.9. Caratteristiche e requisiti del sistema El.Go. ... 42
2.9.1. Descrizione generale ed obiettivi... 42
2.9.2. Destinazione e dimensioni ... 43
2.9.3. Comportamento dinamico... 44
2.9.4. Erogazione della potenza ... 45
2.9.5. Efficacia... 45
2.9.6. Terminale utente e connettività... 45
2.9.7. Sicurezza... 46
2.9.8. Affidabilità e durata nel tempo ... 47
2.9.9. Robustezza... 47
2.9.10. Consumo di potenza ... 47
2.9.11. Installazione e messa in opera ... 48
2.9.12. Trasporto... 48
2.9.13. Requisiti estetici... 48
2.9.14. Requisiti di economicità ... 48
2.10. Fattibilità ... 49
Mauro Turturici – Electronic Goalkeeper: studio e progettazione di un ausilio al gioco del Calcio per
persone diversamente abili
3
3. Architettura del sistema ... 51
3.1. Struttura meccanica... 51
3.2. Azionamento elettrico... 53
3.3. Controllo elettronico... 55
3.3.1. Funzionalità del sistema di controllo ... 55
3.3.2. Schema architetturale del sistema di controllo ... 56
4. Azionamento elettrico ... 59
4.1. Scelta del motore e del riduttore... 60
4.1.1. Il modello del motore utilizzato ... 61
4.1.2. Dati utilizzati nelle simulazioni ... 68
4.1.3. Risultato delle simulazioni... 70
4.2. Motore... 72
4.3. Riduttore... 74
4.4. Driver motore... 74
4.5. Encoder ... 80
5. Design dettagliato dell’elettronica di controllo... 85
5.1. Descrizione dell’hardware... 86
5.1.1. Microcontrollore ... 86
5.1.2. Alimentazione... 90
5.1.3. Modulo Bluetooth... 100
5.1.4. Display... 103
5.1.5. Terminale di controllo wired ... 107
5.1.6. Tastierino ed encoder... 110
5.1.7. Driver/Receiver RS-232 ... 114
5.1.8. LED e Test point... 117
5.1.9. Connessione per In-Circuit Serial Programming (ISP)... 120
5.1.10. Circuiti di start e stop... 122
5.1.11. Sensori fine corsa... 123
5.1.12. Sensori di sicurezza ... 125
5.2. Layout PCB ... 130
5.3. Realizzazione ... 138
5.4. Firmware ... 139
Conclusioni... 141
Ringraziamenti ... 143
Riferimenti bibliografici ... 144
Indice di figure e tabelle
Mauro Turturici – Electronic Goalkeeper: studio e progettazione di un ausilio al gioco del Calcio per
persone diversamente abili
4
Indice di figure e tabelle
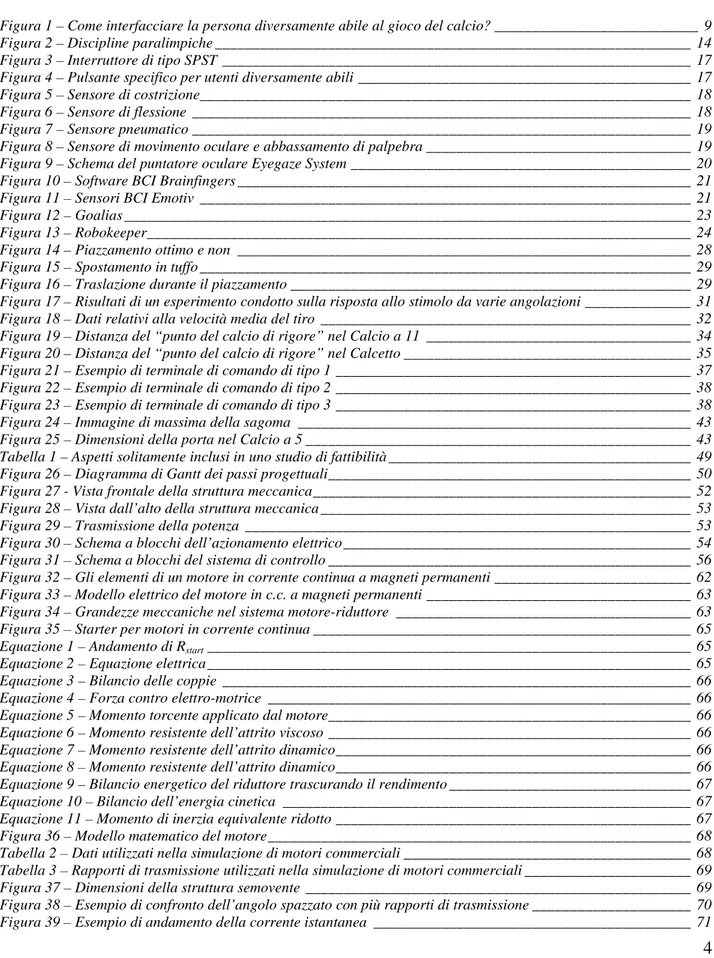
Figura 1 – Come interfacciare la persona diversamente abile al gioco del calcio? ___________________________ 9 Figura 2 – Discipline paralimpiche _______________________________________________________________ 14 Figura 3 – Interruttore di tipo SPST ______________________________________________________________ 17 Figura 4 – Pulsante specifico per utenti diversamente abili ____________________________________________ 17 Figura 5 – Sensore di costrizione_________________________________________________________________ 18 Figura 6 – Sensore di flessione __________________________________________________________________ 18 Figura 7 – Sensore pneumatico __________________________________________________________________ 19 Figura 8 – Sensore di movimento oculare e abbassamento di palpebra ___________________________________ 19 Figura 9 – Schema del puntatore oculare Eyegaze System _____________________________________________ 20 Figura 10 – Software BCI Brainfingers ____________________________________________________________ 21 Figura 11 – Sensori BCI Emotiv _________________________________________________________________ 21 Figura 12 – Goalias ___________________________________________________________________________ 23 Figura 13 – Robokeeper________________________________________________________________________ 24 Figura 14 – Piazzamento ottimo e non ____________________________________________________________ 28 Figura 15 – Spostamento in tuffo _________________________________________________________________ 29 Figura 16 – Traslazione durante il piazzamento _____________________________________________________ 29 Figura 17 – Risultati di un esperimento condotto sulla risposta allo stimolo da varie angolazioni ______________ 31 Figura 18 – Dati relativi alla velocità media del tiro _________________________________________________ 32 Figura 19 – Distanza del “punto del calcio di rigore” nel Calcio a 11 ___________________________________ 34 Figura 20 – Distanza del “punto del calcio di rigore” nel Calcetto ______________________________________ 35 Figura 21 – Esempio di terminale di comando di tipo 1 _______________________________________________ 37 Figura 22 – Esempio di terminale di comando di tipo 2 _______________________________________________ 38 Figura 23 – Esempio di terminale di comando di tipo 3 _______________________________________________ 38 Figura 24 – Immagine di massima della sagoma ____________________________________________________ 43 Figura 25 – Dimensioni della porta nel Calcio a 5 ___________________________________________________ 43 Tabella 1 – Aspetti solitamente inclusi in uno studio di fattibilità ________________________________________ 49 Figura 26 – Diagramma di Gantt dei passi progettuali________________________________________________ 50 Figura 27 - Vista frontale della struttura meccanica__________________________________________________ 52 Figura 28 – Vista dall’alto della struttura meccanica _________________________________________________ 53 Figura 29 – Trasmissione della potenza ___________________________________________________________ 53 Figura 30 – Schema a blocchi dell’azionamento elettrico______________________________________________ 54 Figura 31 – Schema a blocchi del sistema di controllo ________________________________________________ 56 Figura 32 – Gli elementi di un motore in corrente continua a magneti permanenti __________________________ 62 Figura 33 – Modello elettrico del motore in c.c. a magneti permanenti ___________________________________ 63 Figura 34 – Grandezze meccaniche nel sistema motore-riduttore _______________________________________ 63 Figura 35 – Starter per motori in corrente continua __________________________________________________ 65 Equazione 1 – Andamento di Rstart________________________________________________________________ 65
Equazione 2 – Equazione elettrica ________________________________________________________________ 65 Equazione 3 – Bilancio delle coppie ______________________________________________________________ 66 Equazione 4 – Forza contro elettro-motrice ________________________________________________________ 66 Equazione 5 – Momento torcente applicato dal motore________________________________________________ 66 Equazione 6 – Momento resistente dell’attrito viscoso ________________________________________________ 66 Equazione 7 – Momento resistente dell’attrito dinamico_______________________________________________ 66 Equazione 8 – Momento resistente dell’attrito dinamico_______________________________________________ 66 Equazione 9 – Bilancio energetico del riduttore trascurando il rendimento ________________________________ 67 Equazione 10 – Bilancio dell’energia cinetica ______________________________________________________ 67 Equazione 11 – Momento di inerzia equivalente ridotto _______________________________________________ 67 Figura 36 – Modello matematico del motore________________________________________________________ 68 Tabella 2 – Dati utilizzati nella simulazione di motori commerciali ______________________________________ 68 Tabella 3 – Rapporti di trasmissione utilizzati nella simulazione di motori commerciali ______________________ 69 Figura 37 – Dimensioni della struttura semovente ___________________________________________________ 69 Figura 38 – Esempio di confronto dell’angolo spazzato con più rapporti di trasmissione _____________________ 70 Figura 39 – Esempio di andamento della corrente istantanea __________________________________________ 71
Mauro Turturici – Electronic Goalkeeper: studio e progettazione di un ausilio al gioco del Calcio per
persone diversamente abili
5
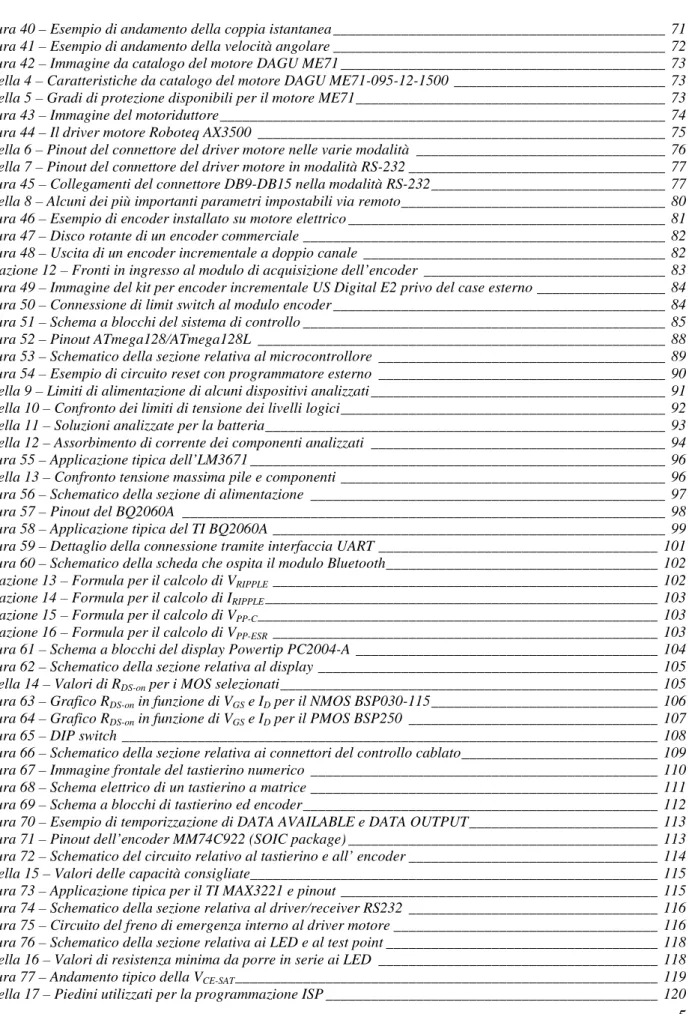
Figura 40 – Esempio di andamento della coppia istantanea ____________________________________________ 71 Figura 41 – Esempio di andamento della velocità angolare ____________________________________________ 72 Figura 42 – Immagine da catalogo del motore DAGU ME71 ___________________________________________ 73 Tabella 4 – Caratteristiche da catalogo del motore DAGU ME71-095-12-1500 ____________________________ 73 Tabella 5 – Gradi di protezione disponibili per il motore ME71_________________________________________ 73 Figura 43 – Immagine del motoriduttore___________________________________________________________ 74 Figura 44 – Il driver motore Roboteq AX3500 ______________________________________________________ 75 Tabella 6 – Pinout del connettore del driver motore nelle varie modalità _________________________________ 76 Tabella 7 – Pinout del connettore del driver motore in modalità RS-232 __________________________________ 77 Figura 45 – Collegamenti del connettore DB9-DB15 nella modalità RS-232_______________________________ 77 Tabella 8 – Alcuni dei più importanti parametri impostabili via remoto___________________________________ 80 Figura 46 – Esempio di encoder installato su motore elettrico __________________________________________ 81 Figura 47 – Disco rotante di un encoder commerciale ________________________________________________ 82 Figura 48 – Uscita di un encoder incrementale a doppio canale ________________________________________ 82 Equazione 12 – Fronti in ingresso al modulo di acquisizione dell’encoder ________________________________ 83 Figura 49 – Immagine del kit per encoder incrementale US Digital E2 privo del case esterno _________________ 84 Figura 50 – Connessione di limit switch al modulo encoder ____________________________________________ 84 Figura 51 – Schema a blocchi del sistema di controllo ________________________________________________ 85 Figura 52 – Pinout ATmega128/ATmega128L ______________________________________________________ 88 Figura 53 – Schematico della sezione relativa al microcontrollore ______________________________________ 89 Figura 54 – Esempio di circuito reset con programmatore esterno ______________________________________ 90 Tabella 9 – Limiti di alimentazione di alcuni dispositivi analizzati _______________________________________ 91 Tabella 10 – Confronto dei limiti di tensione dei livelli logici___________________________________________ 92 Tabella 11 – Soluzioni analizzate per la batteria_____________________________________________________ 93 Tabella 12 – Assorbimento di corrente dei componenti analizzati _______________________________________ 94 Figura 55 – Applicazione tipica dell’LM3671 _______________________________________________________ 96 Tabella 13 – Confronto tensione massima pile e componenti ___________________________________________ 96 Figura 56 – Schematico della sezione di alimentazione _______________________________________________ 97 Figura 57 – Pinout del BQ2060A ________________________________________________________________ 98 Figura 58 – Applicazione tipica del TI BQ2060A ____________________________________________________ 99 Figura 59 – Dettaglio della connessione tramite interfaccia UART _____________________________________ 101 Figura 60 – Schematico della scheda che ospita il modulo Bluetooth____________________________________ 102 Equazione 13 – Formula per il calcolo di VRIPPLE___________________________________________________ 102
Equazione 14 – Formula per il calcolo di IRIPPLE____________________________________________________ 103
Equazione 15 – Formula per il calcolo di VPP-C_____________________________________________________ 103
Equazione 16 – Formula per il calcolo di VPP-ESR ___________________________________________________ 103
Figura 61 – Schema a blocchi del display Powertip PC2004-A ________________________________________ 104 Figura 62 – Schematico della sezione relativa al display _____________________________________________ 105 Tabella 14 – Valori di RDS-on per i MOS selezionati__________________________________________________ 105
Figura 63 – Grafico RDS-on in funzione di VGS e ID per il NMOS BSP030-115______________________________ 106
Figura 64 – Grafico RDS-on in funzione di VGS e ID per il PMOS BSP250 _________________________________ 107
Figura 65 – DIP switch _______________________________________________________________________ 108 Figura 66 – Schematico della sezione relativa ai connettori del controllo cablato__________________________ 109 Figura 67 – Immagine frontale del tastierino numerico ______________________________________________ 110 Figura 68 – Schema elettrico di un tastierino a matrice ______________________________________________ 111 Figura 69 – Schema a blocchi di tastierino ed encoder_______________________________________________ 112 Figura 70 – Esempio di temporizzazione di DATA AVAILABLE e DATA OUTPUT_________________________ 113 Figura 71 – Pinout dell’encoder MM74C922 (SOIC package) _________________________________________ 113 Figura 72 – Schematico del circuito relativo al tastierino e all’ encoder _________________________________ 114 Tabella 15 – Valori delle capacità consigliate______________________________________________________ 115 Figura 73 – Applicazione tipica per il TI MAX3221 e pinout __________________________________________ 115 Figura 74 – Schematico della sezione relativa al driver/receiver RS232 _________________________________ 116 Figura 75 – Circuito del freno di emergenza interno al driver motore ___________________________________ 116 Figura 76 – Schematico della sezione relativa ai LED e al test point ____________________________________ 118 Tabella 16 – Valori di resistenza minima da porre in serie ai LED _____________________________________ 118 Figura 77 – Andamento tipico della VCE-SAT________________________________________________________ 119
Indice di figure e tabelle
Mauro Turturici – Electronic Goalkeeper: studio e progettazione di un ausilio al gioco del Calcio per
persone diversamente abili
6
Figura 78 – Schematico del circuito per la connessione ISP___________________________________________ 121 Figura 79 – Schematico dei circuiti di start e stop __________________________________________________ 122 Figura 80 – Microswitch ______________________________________________________________________ 124 Figura 81 – Headers plastici per la connessione dei sensori __________________________________________ 124 Figura 82 – Schematico della sezione relativa ai connettori per i sensori ________________________________ 125 Figura 83 – Principio di funzionamento dei sensori PIR______________________________________________ 126 Figura 84 – Immagine del sensore Panasonic AMN22111 ____________________________________________ 126 Figura 85 – Schema a blocchi del sensore PIR Panasonic AMN22111 __________________________________ 127 Figura 86 – Collegamento del sensore PIR AMN22111 ______________________________________________ 127 Figura 87 – Funzionamento del sensore PIR AMN22111 _____________________________________________ 128 Figura 88 – Zona di sensibilità del sensore PIR AMN22111___________________________________________ 129 Figura 89 – Disposizione dei sensori PIR sulla porta di gioco _________________________________________ 129 Figura 90 – Top layer della scheda che ospita il microcontrollore______________________________________ 131 Figura 91 – Bottom layer della scheda che ospita il microcontrollore ___________________________________ 132 Figura 92 – Silkscreen Top layer della scheda che ospita il microcontrollore _____________________________ 133 Figura 93 – Top layer e Bottom layer del PCB che ospita il modulo Bluetooth ____________________________ 134 Figura 94 – Silkscreen layer della scheda che ospita il modulo Bluetooth ________________________________ 135 Figura 95 – Top layer della scheda che ospita l’interfaccia utente______________________________________ 136 Figura 96 – Bottom layer della scheda che ospita l’interfaccia utente ___________________________________ 137 Figura 97 – Silkscreen layer della scheda che ospita l’interfaccia utente_________________________________ 138 Figura 98 – ATMEL AVR STK500 _______________________________________________________________ 139 Figura 99 – Schema a blocchi dell’esecuzione _____________________________________________________ 140