Mauro Turturici – Electronic Goalkeeper: studio e progettazione di un ausilio al gioco del Calcio per persone diversamente abili
85
5. Design dettagliato dell’elettronica di controllo
Il design dettagliato dell’hardware che costituisce l’elettronica di controllo si è concretizzato nell’effettuare le opportune scelte riguardo soluzioni e componenti da impiegare, nel realizzare lo schematico dell’intero sistema, nonché disegnare il layout dei PCB17.
Il processo in questione si compone oltre che dall’ideazione del circuito anche da questioni di natura pratica ovvero la paziente identificazione di tutti i componenti reali relativi allo schema ideato, effettuata sulla base dell’effettiva reperibilità di questi presso gli usuali distributori ed alla disponibilità di questi nel package desiderato. Oltre a ciò occorre sottolineare che in molti casi il cambiamento di un componente o di una parte di circuito ha portato alla parziale ridefinizione di altre sezioni dello schematico con eventuali conseguenze a catena sulla scelta di altri elementi; ad esempio la scelta di una differente tensione di alimentazione comporta in linea di principio il cambiamento di molti componenti poiché occorre che essi siano compatibili con la nuova tensione.
Nella Figura 51 è nuovamente riportato lo schema a blocchi del sistema di controllo, utile come riferimento per quanto discusso nel seguito.
Figura 51 – Schema a blocchi del sistema di controllo
Mauro Turturici – Electronic Goalkeeper: studio e progettazione di un ausilio al gioco del Calcio per persone diversamente abili
86
5.1. Descrizione dell’hardware
Vengono presentati in questo paragrafo i risultati ottenuti con la progettazione elettronica e le considerazioni che hanno condotto all’esito finale. In alcune sezioni, e solo ove utile alla comprensione, verranno approfonditi aspetti di natura tecnologica legati ai componenti impiegati.
5.1.1. Microcontrollore
Come noto un microcontrollore oltre a disporre internamente di una serie di unità di calcolo e di memoria possiede, a differenza dei microprocessori, una diretta connettività di tipo general
purpose con il mondo esterno. Oltre a questo i microcontrollori possono disporre di interfacce di
comunicazione largamente diffuse come UART18, USART, TWI19 (anche detta I2C20 oppure SPI21) ed altre di minore diffusione applicativa. Molti dispongono anche di convertitori A/D. Le conoscenze pregresse riguardo strumenti di sviluppo e specifiche librerie di funzioni, disponibili pubblicamente o adattate allo scopo, nonché la disponibilità di uno starter kit per l’apprendimento delle tecniche di programmazione e per lo sviluppo, hanno fatto sì che la scelta di soluzioni valutate per il microcontrollore si orientasse direttamente su quelli di fabbricazione
Atmel e della serie megaAVR.
Da notare anche che per questi dispositivi esiste un ambiente di sviluppo gratuito22 ed un importante tool di compilazione gratuito23 che permette l’utilizzo del linguaggio C nella programmazione, molto più comodo del classico Assembler.
La selezione del particolare modello è stata effettuata sulla base di considerazioni riguardo la connettività stimata necessaria e alle prestazioni .
Il numero minimo di I/O necessari è stato stabilito in base al seguente conteggio: • 6 per il controllore tastiera
• 11 per il display
• 6 per il modulo Bluetooth • 2 per il monitor batteria
• 4 per le spie (accensione, batteria scarica, errore, connessione con terminale) • 2 per i sensori di fine corsa
• 3 per i sensori di sicurezza
18 Universal Asyncronous Receiver Transmitter 19 Two-Wire Interface
20
Inter Integrated Circuit 21 Serial Peripheral Interface 22 AVR Studio 4
Mauro Turturici – Electronic Goalkeeper: studio e progettazione di un ausilio al gioco del Calcio per persone diversamente abili
87 • 5 per il driver RS-232
• 1 per il freno manuale
• 2 per il selettore del terminale utente
• 2 per il circuito di accensione e spegnimento • 1 o più test points
• 1 per enable alimentazione
Il numero minimo di pin di I/O risulta perciò 46.
Oltre a questo si è tenuto conto della disponibilità di ingressi dotati di convertitore A/D e di interfacce UART e TWI (I2C); in particolare si è resa necessaria la presenza di:
• due interfacce UART, la prima per comunicare con il modulo Bluetooth, l’altra per pilotare il driver motore; da notare che il modulo Bluetooth scelto dispone di altro tipo di interfaccia di comunicazione (SPI, I2C, USB) ma si è ritenuto conveniente utilizzare la UART grazie alla sua semplicità di gestione
• un’interfaccia I2C per la comunicazione con il monitor batteria • otto ingressi dotati di convertitore A/D per i seguenti dispositivi:
o terminale utente wired
o sensori di fine corsa e di sicurezza
o monitor della tensione di alimentazione
Le esigenze illustrate immediatamente sopra hanno indirizzato la scelta del microcontrollore verso il modello ATmega128, ampiamente disponibile presso il distributore abituale24; per motivi progettuali si è quindi deciso di adottare la versione “L” dello stesso, che garantisce funzionamento con tensioni non inferiori a 2.7 V.
Alcune delle caratteristiche più rilevanti del microcontrollore scelto sono riportate nel seguito e la relativa piedinatura per il package TQFP 64A è riportata in Figura 52.
• High-performance, Low-power AVR® 8-bit Microcontroller
• Advanced RISC Architecture
– 133 Powerful Instructions – Most Single Clock Cycle Execution
– 32 x 8 General Purpose Working Registers + Peripheral Control
Registers
– Up to 16 MIPS Throughput at 16 MHz
• High Endurance Non-volatile Memory segments
– 128K Bytes of In-System Self-programmable Flash program memory
– 4K Bytes EEPROM
– 4K Bytes Internal SRAM
– Write/Erase cycles: 10,000 Flash/100,000 EEPROM
• In-System Programming by On-chip Boot Program
• Peripheral Features
– Two 8-bit Timer/Counters with Separate Prescalers and Compare Modes
– Two Expanded 16-bit Timer/Counters with Separate Prescaler, Compare
Mode and
Mauro Turturici – Electronic Goalkeeper: studio e progettazione di un ausilio al gioco del Calcio per persone diversamente abili
88
• Capture Mode
– Real Time Counter with Separate Oscillator
– Output Compare Modulator
– 8-channel, 10-bit ADC
• 2 Differential Channels with Programmable Gain at 1x, 10x, or 200x
– Byte-oriented Two-wire Serial Interface
– Dual Programmable Serial USARTs
• I/O and Packages
– 53 Programmable I/O Lines
– 64-lead TQFP and 64-pad QFN/MLF
• Operating Voltages
– 2.7 - 5.5 V ATmega128L
• Speed Grades
– 0 - 8 MHz ATmega128L
Figura 52 – Pinout ATmega128/ATmega128L
Nella Figura 53 è mostrato invece lo schematico relativo alle connessioni dei piedini del microcontrollore, con le porte connesse agli opportuni elementi circuitali e/o componenti del sistema.
Mauro Turturici – Electronic Goalkeeper: studio e progettazione di un ausilio al gioco del Calcio per persone diversamente abili
89 3 - /AT_BT_UART_RTS MH1 M HOLE2 MH2 M HOLE2 MH3 M HOLE2 MH4 M HOLE2 4 - /AT_BT_RESET AT_HAND_BRAKE AT_LED_1 AT_LED_4 AT_LED_3 AT_LED_2 AT_SENSOR_RIGHT AT_SENSOR_LEFT 1 - VCC_3.3V 5 - AT_BT_UART_DCD SW1 SW PUSHBUTTON VCC_3.3V VCC_3.3V VCC_3.3V VCC_3.3V collegato in superficie 8 - GND 7 - BT_RXD 6 - BT_TXD R5 220 R1 150k R4 10k C5 22pF
AVR® 8-bit Microcontroller
U1 ATMEGA_128L A V C C 6 4 G N D 6 3 A R E F 6 2 G N D ( 1 ) 5 3 V C C ( 1 ) 5 2 (A D 0 ) P A 0 5 1 (A D 1 ) P A 1 5 0 (A D 2 ) P A 2 4 9 (AD3) PA3 48 (AD4) PA4 47 (AD5) PA5 46 (AD6) PA6 45 (AD7) PA7 44 (ALE) PG2 43 (WR) PG0 33 X T A L 1 2 4 X T A L 2 2 3 G N D ( 0 ) 2 2 V C C ( 0 ) 2 1 R E S E T 2 0 P G 4 /T O S C 1 1 9 P G 3 /T O S C 2 1 8 PEN 1 PE0 RXD0 (PDI) 2 PE1 (TXD0/PD0) 3 PE2 (XCK0/AIN0) 4 PE3 (OC3A/AIN1) 5 PE4 (OC3B/INT4) 6 PE5 (OC3C/INT5) 7 PE6 (T3/INT6) 8 PE7 (ICP3/INT7) 9 PB0 (SS) 10 PB1 (SCK) 11 PB2 (MOSI) 12 PB3 (MISO) 13 PB4 (OC0) 14 PB5 (OC1A) 15 PB6 (OC1B) 16 P B 7 ( O C 2 /O C 1 C ) 1 7 (T M S /A D C 5 ) P F 5 5 6 (T C K /A D C 4 ) P F 4 5 7 (T D O /A D C 6 ) P F 6 5 5 (A D C 2 ) P F 2 5 9 (A D C 1 ) P F 1 6 0 (T D I/ A D C 7 ) P F 7 5 4 (A D C 3 ) P F 3 5 8 (A D C 0 ) P F 0 6 1 P D 0 ( S C L /I N T 0 ) 2 5 P D 1 ( S D A /I N T 1 ) 2 6 P D 2 ( R X D 1 /I N T 2 ) 2 7 P D 3 ( T X D 1 /I N T 3 ) 2 8 P D 4 ( IC P 1 ) 2 9 P D 5 ( X C K 1 ) 3 0 P D 6 ( T 1 ) 3 1 P D 7 ( T 2 ) 3 2 (A15) PC7 42 (RD) PG1 34 (A8) PC0 35 (A9) PC1 36 (A10) PC2 37 (A11) PC3 38 (A12) PC4 39 (A13) PC5 40 (A14) PC6 41 C6 22pF R3 47k J1 HEADER 8 1 2 3 4 5 6 7 8 L1 10uH C1 100nF C2 100nF Y 1 8Meg TP1 /PEN R2 100k C3 10nF AT_BRAKE AT_RS232_INVALID AT_RS232_ENA AT_ISP_SCK AT_BT_RXD0_(ISP_MOSI) /AT_ISP_RST AT_DISPLAY _LED_ON AT_DISPLAY _RS AT_DISPLAY _PWR AT_BT_TXD0_(ISP_MISO) AT_DISPLAY _ENA AT_DISPLAY _R/W AT_74C922_DATA_B AT_74C922_DATA_A AT_74C922_DATA_AV AT_74C922_DATA_D AT_74C922_DATA_C AT_SENSOR_1 AT_PWR_MONITOR AT_74C922_OE AT_SENSOR_2 AT_TEST_POINT AT_CMD_IN_LEFT_2 AT_SENSOR_3 AT_BQ2060A_SMBDAT(SDA) AT_BQ2060A_SMBCLK(SCL) AT_CMD_IN_LEFT_1 AT_SEL_INT_2 AT_SEL_INT_1 AT_CMD_IN_RIGHT_1 AT_SHUTDOWN AT_CMD_IN_RIGHT_2 AT_STATUS AT_RS232_TXD AT_DISPLAY _DATABUS_2 AT_DISPLAY _DATABUS_1 AT_DISPLAY _DATABUS_5 AT_DISPLAY _DATABUS_4 AT_DISPLAY _DATABUS_3 AT_DISPLAY _DATABUS_8 AT_DISPLAY _DATABUS_7 AT_DISPLAY _DATABUS_6 BT_RXD AT_RS232_RXD BT_TXD Title
Size Document Number Rev
Date: Sheet of
Mauro Turturici 1.3
El.Go. Mainboard ATMEGA 128A
A 1 12 Thursday , September 09, 2010 C4 100nF 2 - /AT_BT_UART_CTS
Figura 53 – Schematico della sezione relativa al microcontrollore
Partendo dall’alto si nota sulla sinistra il partitore di tensione (R1-R2) inserito per poter monitorare direttamente tramite uno degli ingressi A/D del microcontrollore la tensione che giunge su PWR_MONITOR. Questa scelta è stata effettuata per avere un monitoraggio della tensione di alimentazione che non utilizzasse monitor batteria e quindi di immeditata ed economica realizzazione. Tale aspetto può risultare vantaggioso in fase di sviluppo in quanto non occorre attendere l’implementazione della comunicazione con il monitor batteria per avere la funzionalità desiderata.
Proseguendo sulla destra sono presenti i componenti passivi utili a stabilizzare la tensione di alimentazione (C1) e a filtrare eventuali disturbi sull’alimentazione del modulo A/D on-board (C2
ed L1).
Scendendo si osservano il connettore (J1) per il modulo Bluetooth, realizzato su scheda esterna, ed il piedino /PEN raggiungibile mediante header esterno, con il pull-up resistivo che evita la condizione di piedino flottante. Questo piedino può essere utilizzato per la programmazione in alternativa al /RESET (piedino numero 20).
Mauro Turturici – Electronic Goalkeeper: studio e progettazione di un ausilio al gioco del Calcio per persone diversamente abili
90 In basso il pulsante di reset con la circuiteria accessoria ed il quarzo (Y1, 8 MHz) con i condensatori consigliati (C5 e C6).
La resistenza R5 ha il compito di limitare la corrente di scarica del condensatore C3 al momento della pressione del tasto SW1, ad un valore prossimo a 15 mA.
Oltre a questo si è adoperato un ulteriore accorgimento: è mostrata in Figura 54 una possibile situazione circuitale nel caso di collegamento di un generico programmatore ISP al pin di reset dell’ATmega128.
Il programmatore verosimilmente disporrà di un rispettivo tasto per il reset dell’ATmega128 o di un circuito che piloti tale piedino al livello basso (nella Figura 54 schematizzato con il “TASTO RESET PROGRAMMATORE”). All’attivazione di tale interruttore la corrente di scarica del
condensatore C3 (CONDENSATORE in Figura 54) potrebbe in questo caso essere eccessiva, dal momento che esso verrebbe di fatto cortocircuitato, per evitare questo evento il collegamento con il piedino di reset è stato posto a monte della resistenza R5 (RESISTENZA DI LIMITAZIONE in Figura
54), che funge quindi da limitatore anche in questo caso.
RESISTORE DI PULL-UP
RESISTORE DI LIMITAZIONE
INGRESSO RESET MICROCONTROLLORE VCC
VCC
RESISTORE DI PULL-UP
CONDENSATORE TASTO RESET PROGRAMMATORE
TASTO RESET CIRCUITO
PROGRAMMATORE ESTERNO
CIRCUITO INTERNO OK!
Figura 54 – Esempio di circuito reset con programmatore esterno
Gli elementi R4 e C3 servono a mantenere la tensione alta su /RESET; C4 ha il compito di filtrare disturbi sull’alimentazione per l’ingresso sul piedino 21.
5.1.2. Alimentazione
La scelta della/e tensione/i di alimentazione da un lato segue quella dei componenti di necessario utilizzo, dall’altro può imporre l’impiego di un componente piuttosto che un altro per quelli su cui si ha maggiore libertà.
Ai fini di una completa comprensione delle scelte effettuate è utile illustrare le considerazioni preliminari che hanno guidato tali decisioni:
• il microcontrollore scelto è disponibile sia in versione standard (alimentazione fra 4.5 V e 5.5 V) sia in versione low power (alimentazione fra 2.7 V e 5.5 V)
Mauro Turturici – Electronic Goalkeeper: studio e progettazione di un ausilio al gioco del Calcio per persone diversamente abili
91 • molti dei display disponibili in commercio richiedono un’alimentazione compresa intorno a 5 V se non per la logica almeno per lo schermo e la retro-illuminazione, motivo per cui occorre in ogni caso avere una tensione intorno a 5 V per poter utilizzare un componente di questo tipo
• il modulo Bluetooth identificato (vedi paragrafo 5.1.3) necessita di alimentazione a 3.3 V
• altra componentistica prevista nel circuito finale presenta vincoli compatibili con i due precedenti
Dopo aver eseguito un’approfondita ricerca su molti dei componenti di potenziale utilizzo si sono estratti i valori di tensione più adatti all’impiego con tali elementi e da ciò è stata guidata la scelta delle batterie e della circuiteria della sezione di alimentazione.
Nella Tabella 9 sono riportati i limiti consigliati dei componenti già scelti e di alcuni presi ad esempio fra quelli di immediata reperibilità presso il distributore abituale e di particolare interesse applicativo.
Componente Modello VCC MIN. (V) VCC TYP. (V) VCC MAX. (V)
Microcontrollore Atmel AVR ATmega128L 2.7 - 5.5
Encoder tastierino Fairchild MM94C922 3 - 15
Modulo BT Stollmann BlueMod+P25/G2 2.8 3.3 3.6
Display Trident TRIMODS15:
- logica - LCD - retroilluminazione 4.5 3.8 5 4.5 4.1 5.5 4.9 Display Powertip PC2004: - logica e LCD - retroilluminazione 2.7 5 4.2 5.5 LEDs: - red - yellow - green Agilent Technologies HLMP-S201 HLMP-S301 HLMP-S501 1.6 1.5 1.5 1.8 2.1 2.2 2.2 2.6 3.0
Monitor batteria Texas Instruments BQ2060A 2.7 3.3 3.7
Driver RS-232 Texas Instruments MAX3221
VCC = 3.3 V VCC = 3.3 V 3.0 4.5 3.3 5.0 3.6 5.5
Buffer (trig. Schmitt) Texas Instruments SN74LVC1G17 1.65 - 5.5
Inverter Texas Instruments SN74LVC04A 1.65 - 3.6
Porta OR Texas Instruments SN74LVC2G32 1.65 - 5.5
Buffer quadruplo NXP/Philips 74LVC126A 2.7 - 3.6
Tabella 9 – Limiti di alimentazione di alcuni dispositivi analizzati
Sulla base di queste considerazioni si è scelto di utilizzare un’alimentazione di 3.3 V per la logica e di prevedere comunque una tensione nominale pari o superiore a 4.2 V per l’eventuale pilotaggio della logica, dello schermo a cristalli liquidi e della retro-illuminazione del display.
Una verifica preliminare delle tensioni associate ai livelli logici dei vari componenti è necessaria per garantire compatibilità fra i componenti logici del circuito interconnessi fra loro. Nella Tabella 10 si riportano tali valori per un immediato confronto.
Mauro Turturici – Electronic Goalkeeper: studio e progettazione di un ausilio al gioco del Calcio per persone diversamente abili
92 Componente Condizioni VIL (V) VIH (V) VOL (V) VOH (V) Atmel AVR ATmega128L VCC= 2.7 – 5.5 V IOL = 10 mA VCC = 3V IOL = 20 mA VCC = 5V min = −0.5 max = 0.2∙VCC min = 0.6∙VCC max = VCC+0.5 max = 0.5 max = 0.7 min = 2.2 min = 4.2 Fairchild MM94C922 VCC = 5V VCC = 5V IO = ±10 mA min = 0.5 typ = 1.5 min = 3.5 typ = 4.5 max = 0.5 min = 4.5 Stollmann BlueMod+P25/G2 VCC = 3.3 V IOH = −4 mA min = −0.5 max = 0.8 min = 2.0 max = VCC+0.5 max = 0.2 min = VCC−0.2 Trident TRIMODS15 Vdd = 5 V IOL = 1.2 mA IOH = −0.205 mA min = −0.3 max = 0.6 min = 2.2 max = Vdd max = 0.4 min = 2.4 Texas Instruments BQ2060A VCC =2.7 – 3.3 V IOL=1.0 mA min = −0.3 max = 0.8 min = 1.7 max = 6.0
max = 0.4 non riportato
Texas Instruments MAX3221 VCC = 3.3 V VCC = 5 V IOL = 1.6 mA IOH = −1 mA max = 0.8 min = 2.0 min = 2.4 max = 0.4 min = VCC−0.6 typ = VCC−0.1 Texas Instruments SN74LVC1G17 VCC = 3.0 V VCC = 3.0 V IOH=±16/±24 mA IOH=±100 μA min = 0.89 max = 1.2 min = 1.48 max = 1.92 max = 0.4/0.55 max = 0.1 min = 2.3/2.4 min = VCC–0.1 Texas Instruments SN74LVC04A VCC =2.7 – 3.6 V VCC = 3.0 IOH=±24 mA max = 0.8 min = 2.0 max = 0.55 min = 2.3 Texas Instruments SN74LVC2G32 VCC = 4.5 – 5.5 V VCC = 4.5 V IOH=±32 mA IOH=±100 μA max = 0.3∙VCC min = 0.7∙VCC max = 0.55 max = 0.1 min = 3.8 max =VCC–0.1 NXP 74LVC126A VCC= 2.7 – 3.6 V VCC = 3.0 IOH=±24 mA max = 0.8 min = 2.0 max = 0.55 min = VCC–0.8
Tabella 10 – Confronto dei limiti di tensione dei livelli logici
Mauro Turturici – Electronic Goalkeeper: studio e progettazione di un ausilio al gioco del Calcio per persone diversamente abili
93 • non si ha sicurezza riguardo il livello logico VIH dell’encoder tastiera poiché le
misurazioni sono fatte alla tensione di alimentazione di 5 V, mentre il sistema richiede funzionamento con tensione di 3.3 V, tuttavia l’accettabilità di questo valore come alimentazione del sistema e la proporzionalità dei livelli logici rispetto alla tensione VCC emersa dal datasheet, suggeriscono il corretto interfacciamento dello stesso con
altri dispositivi logici; altro aspetto da considerare è la non reperibilità presso il distributore di una alternativa a questo integrato, di marca e modello differenti, funzionalmente simile
• per il display selezionato, ovvero il Powertip PC2004, non esistono riferimenti che trattino i livelli logici, tuttavia l’analisi dei dati in possesso ed il confronto con altri modelli di display lasciano presupporre che il funzionamento possa avvenire senza particolari problemi
• le porte logiche e gli integrati che si interfacciano con il microcontrollore devono essere alimentati con un tensione prossima a 3.3 V, in alternativa occorre predisporre una traslazione di tensione opportuna; in caso contrario si può non avere compatibilità completa
In conclusione si può affermare con relativa sicurezza che utilizzando una tensione di alimentazione a 3.3 V l’interfacciamento e la comunicazione fra gli integrati selezionati non subirà malfunzionamenti dovuti a livelli logici non compatibili, almeno per quanto riguarda gli elementi fondamentali per il funzionamento basilare e la sicurezza. Gli unici inconvenienti si potrebbero avere nella parte relativa alla tastiera e al display, ipotesi che comunque appare abbastanza remota per quanto esposto appena sopra.
Da questa decisione è seguita una breve analisi riguardo la soluzione da adottare per le batterie ricaricabili con cui alimentare il sistema di controllo.
Non si è preso in considerazione l’utilizzo di una batteria al piombo-acido a causa dell’elevato ingombro unito al fatto che per l’applicazione non è richiesta una capacità ed una erogazione di corrente per cui l’utilizzo di queste batterie risulti necessario. Le tipologie di batteria prese in considerazione dato l’attuale sviluppo tecnologico sono invece:
• Ni-MH di tipo AA (in pack da 3, 4 o 6 pile), o in alternativa di tipo Ni-Cd • Li-Ion singola cella di capacità variabile
I valori di tensione nominali e limite di queste due soluzioni, in varie configurazioni di numero di celle, sono riportate in Tabella 11 [27] [28].
Capacità V minima (V) V nominale (V) V carica (V) V max (open circuit) (V) Ni-MH <2500 mAh 0.9/1.0 1.2 1.25-1.35 1.45
Ni-MH 3 pack <2500 mAh 2.7/3.0 3.6 3.75/3.95 4.35
Ni-MH 4 pack <2500 mAh 3.6/4.0 4.8 5.0/5.4 5.8
Ni-MH 6 pack <2500 mAh 5.4/6.0 7.2 7.5/8.1 8.7
Li-Ion 0.15 - 5.3 Ah 2.75 3.7/4.2 4.2
Mauro Turturici – Electronic Goalkeeper: studio e progettazione di un ausilio al gioco del Calcio per persone diversamente abili
94 Oltre ai vincoli di tensione di alimentazione, mostrati nella Tabella 9, citiamo altre considerazioni che hanno guidato la scelta della soluzione più adatta fra quelle valutate:
• non ci sono importanti vincoli di peso e volume per la scheda da realizzare • occorre in ogni caso una alimentazione non inferiore a 4.2 V per il display
• se si utilizza una batteria ricaricabile Li-Ion non è agevole la sostituzione della stessa, mentre usando un pack di pile AA all’interno di un apposito holder plastico è in linea di principio possibile fare a meno del caricabatteria integrato utilizzando batterie precaricate • una soluzione con batteria al Litio, a parità di capacità, ha un prezzo circa triplo (intorno ai
30 € ) rispetto a quello della soluzione con batterie Ni-MH (inferiore a 10 € per 4 batterie) Dopo un’attenta analisi e valutazione incrociata con gli elementi discreti da impiegare nel circuito è stato scelto di utilizzare un pack di 4 pile AA Ni-MH, perciò una tensione nominale di 4.8 V, dalla quale occorre ricavare:
• una tensione da 3.3 V per l’alimentazione della logica integrata
• una tensione opportuna per il pilotaggio del LED di retro-illuminazione del display ed eventualmente di altri LED presenti nel circuito
Data la scelta della tensione di alimentazione è stato necessario inserire un regolatore (DC-DC
converter) che fornisca una tensione di 3.3 V a partire da quella delle batterie.
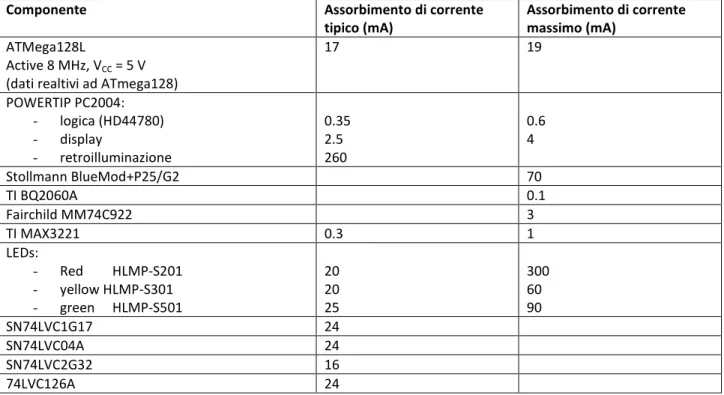
Un aspetto preliminare alla scelta del regolatore è il calcolo approssimativo dell’assorbimento massimo di corrente sulla base di componenti scelti o indicativi, riportato nella Tabella 12:
Componente Assorbimento di corrente
tipico (mA)
Assorbimento di corrente massimo (mA)
ATMega128L
Active 8 MHz, VCC = 5 V
(dati realtivi ad ATmega128)
17 19 POWERTIP PC2004: - logica (HD44780) - display - retroilluminazione 0.35 2.5 260 0.6 4 Stollmann BlueMod+P25/G2 70 TI BQ2060A 0.1 Fairchild MM74C922 3 TI MAX3221 0.3 1 LEDs: - Red HLMP-S201 - yellow HLMP-S301 - green HLMP-S501 20 20 25 300 60 90 SN74LVC1G17 24 SN74LVC04A 24 SN74LVC2G32 16 74LVC126A 24
Mauro Turturici – Electronic Goalkeeper: studio e progettazione di un ausilio al gioco del Calcio per persone diversamente abili
95 Sommando tutte le correnti, a patto di usare i componenti presi ad esempio, l’assorbimento totale risulta inferiore ai 500 mA.
Da questo breve calcolo si evince anche la durata delle batterie scelte che nel caso peggiore sarebbe di alcune ore, tempo assolutamente accettabile per lo scopo finale.
I modelli di regolatore presi in considerazione appartengono a due categorie, LDO25 e switching. I primi sono regolatori lineari realizzati con una tecnologia che permette di avere una piccola differenza di tensione fra ingresso ed uscita (fino a qualche decina di mV), a differenza dei classici lineari in cui queste prestazioni difficilmente si ottengono; le caratteristiche più importanti di questi regolatori rispetto agli switching sono un prezzo inferiore ed una maggiore erogazione di corrente a parità di costo, a fronte però di una minore efficienza.
Gli switching sfruttano invece una tecnologia che permette di avere tensioni di uscita anche maggiori di quelle in ingresso ed efficienza che in molti casi può superare il 95%. Questi dispositivi però solitamente sono rumorosi (ripple non trascurabile della tensione di uscita) ed hanno una minore erogazione di corrente rispetto ai LDO a parità di costo, in molti modelli di fascia economica la corrente massima erogabile non raggiunge 1 A.
A causa della significativa differenza di potenziale fra la tensione di batteria e quella di alimentazione (differenza pari a circa 1.5 V) e considerando che il circuito richiede una erogazione di corrente inferiore a 500 mA, si è preferito utilizzare un regolatore del secondo tipo, in modo da massimizzare l’efficienza ed aumentare così la durata delle batterie.
La scelta è ricaduta sull’LM3671, prodotto da National Semiconductor, le cui caratteristiche più importanti sono riportate di seguito:
• 600 mA maximum load capability
• 2 MHz PWM
• Current overload and thermal shutdown protection
• Internal soft start
• 16 µA typical quiescent current
Questo regolatore è disponibile in numerose varianti, differenti per tensione di uscita, variabile fra 1.2 V e 3.3 V; inoltre è presente una versione “ADJ” con tensione impostabile mediante elementi passivi posti in uscita.
Data la tensione richiesta nel circuito è stata perciò selezionata la versione LM3671MF-3.3/NOPB, nel package SOT23-5. I valori di capacità e induttanza da porre in uscita sono riportati nel tipico circuito applicativo di Figura 55; nella versione fixed, utilizzata per lo scopo, non sono necessari altri componenti; di seguito all’immagine una breve descrizione dei piedini.
Mauro Turturici – Electronic Goalkeeper: studio e progettazione di un ausilio al gioco del Calcio per persone diversamente abili
96
Figura 55 – Applicazione tipica dell’LM3671
1. Il piedino VIN è il piedino di ingresso del regolatore; per motivi progettuali non è
direttamente connesso alla batteria ma è collegato all’alimentazione tramite una resistenza di basso valore (circa 1 Ω)
2. Il piedino GND è collegato alla massa del sistema
3. Il piedino di ENABLE consente l’abilitazione e disabilitazione del regolatore, rispettivamente per una tensione superiore ad 1.0 V ed inferiore a 0.4 V.
4. Il piedino FB consente la retroazione della tensione di uscita sul circuito interno al regolatore che ne stabilizza il valore a quello prefissato
5. Il pin SW è un piedino di uscita, e collega l’induttanza L1 allo switch interno collegato alla tensione di ingresso
Analizzando i possibili malfunzionamenti dovuti ad un utilizzo non corretto delle batterie si è visto che esiste il rischio di sostituzione delle batterie Ni-MH con altre di dimensioni identiche (AA) ma di tecnologia differente, ed in particolare che abbiano tensione nominale significativamente superiore come ad esempio le pile alcaline. Questo fatto potrebbe portare a malfunzionamenti o al limite alla rottura di uno o più componenti, è quindi utile confrontare la tensione massima con i limiti di quei componenti a cui giunge la tensione di batteria per assicurarsi che non vi siano malfunzionamenti.
Gli unici componenti a cui giunge la tensione di batteria sono: • il regolatore di tensione
• la porta OR utilizzata per il pulsante di accensione (cfr. par. 5.1.10) • i LED (attraverso un resistore di caduta)
Il confronto è riportato in Tabella 13.
Pack 4 pile Alcaline V max o.c. = 1.6 x 4 = 6.4 V Componente Maximum supply voltage
LM3671 6.0 V SN74LVC2G32 6.5 V LEDs: - red - yellow - green Conditions: IF=20 mA 2.2 2.6 3.0
Mauro Turturici – Electronic Goalkeeper: studio e progettazione di un ausilio al gioco del Calcio per persone diversamente abili
97 Osservando la Tabella 13 emerge che l’uso di questo tipo di batterie deve essere evitato in quanto potrebbe verosimilmente causare malfunzionamenti o la rottura di componenti. Si vede che l’unico elemento veramente a rischio risulta essere il regolatore, in quanto il SN74LVC2G32 ha un valore limite di 6.5 V, mentre per i LED si è previsto un resistore di opportuno valore che ne limiti la corrente e la caduta di tensione come discusso nel paragrafo 5.1.8.
Si è perciò stabilito di porre un diodo Zener di protezione (D8) all’ingresso VIN del regolatore
LM3671, come mostrato nella Figura 56. La soglia nominale del diodo scelto è di 5.6 V, dal rispettivo datasheet risulta comunque che tale valore oscilla fra 5.2 V e 6.0 V, risultando quindi allineato con le esigenze di protezione del regolatore. È stata posta una resistenza in serie all’alimentazione (R35) che serve per limitare la corrente nello Zener nel caso di entrata in conduzione di quest’ultimo.
Title
Size Document Number Rev
Date: Sheet of
Mauro Turturici 1.3
El.Go. Mainboard POWER SUPPLY
A 6 12 Thursday , September 30, 2010 R32 100 R35 1.2 (7W) R25 100k C13 4.7uF J2 EXT_PWR_IN 1 2 R27 100 R29 10k R24 10k R23 10k R26 100 TP4 TEST R34 100k D5 BZX84C5V6 R33 1Meg C15 10uF C14 100nF R28 1Meg R38 100k C9 100nF TP5 TEST R36 100k R30 10k C10 100nF SW3 SPST ON-OFF 1 2 TP6 TEST D7 DIODE SCHOTTKY
Compliant Gas Gauge IC
U7 BQ2060A HDQ16 1 ESCL 2 ESDA 3 RBI 4 REG 5 V_OUT 6 V_CC 7 V_SS 8 DISP 9 LED_1 10 LED_2 11 LED_3 12 LED_4 13 LED_5 14 DFC 15 CFC 16 CVON 17 THON 18 TS 19 SRC 20 SR_2 21 SR_1 22 VCELL_1 23 VCELL_2 24 VCELL_3 25 VCELL_4 26 SMBD 27 SMBC 28 SW4 SPDT ON-ON TP3 TEST C12 10uF D8 5.6V (5W) D6 BZX84C5V6
1K I2C SERIAL EEPROM 128x8
U6 24LC01B A0_NC 1 A1_NC 2 A2_NC 3 VSS 4 SDA 5 SCL 6 WP 7 VCC 8 L2 2.2uH C11 100nF R39 100m R37 100k 2 MHz 600 mA Step-Down DC-DC Converter U8 LM3671 VIN 1 GND 2 EN 3 FB 4 SW 5 BP1 BATTERY _PACK V + 1 V -2 R31 100 PWR_ENABLE AT_BQ2060A_SMBCLK(SCL) AT_BQ2060A_SMBDAT(SDA) VCC_BATT AT_PWR_MONITOR VCC_3.3V VCC_3.3V VCC_3.3V VCC_3.3V V_BATT
Figura 56 – Schematico della sezione di alimentazione
Altro dispositivo facente parte della sezione di alimentazione è il monitor batteria, qui utilizzato principalmente come fuel gauge e per valutare la corrente erogata. Fra i molti in commercio si è notato una certa carenza di modelli dedicati alla tecnologia Ni-MH, mentre abbondano quelli dedicati alle celle Li-Ion. L’unico modello sul mercato disponibile per la tecnologia scelta e che
Mauro Turturici – Electronic Goalkeeper: studio e progettazione di un ausilio al gioco del Calcio per persone diversamente abili
98 disponga di un’interfaccia I2C on-board è il BQ2060A, prodotto da Texas Instruments, di cui riportiamo le caratteristiche più importanti:
• Provides Accurate Measurement of Available Charge in NiCd, NiMH, Li-Ion,
and Lead-Acid, Batteries
• Supports the 2-Wire SMBus v1.1 Interface With PEC or 1-Wire HDQ16
• Provides 15-Bit Resolution for Voltage Temperature, and Current
Measurements
• Measures Charge Flow Using a V-to-F Converter With Offset of Less Than 16
µV After Calibration
• Consumes Less Than 0.5 mW Operating
• 28-Pin 150-Mil SSOP
La piedinatura dell’integrato è riportata in Figura 57. Nella Figura 58 è mostrato invece il circuito tipico di applicazione.
Mauro Turturici – Electronic Goalkeeper: studio e progettazione di un ausilio al gioco del Calcio per persone diversamente abili
99
Figura 58 – Applicazione tipica del TI BQ2060A
Il BQ2060A dispone di molte funzionalità di cui non è previsto l’utilizzo nel sistema progettato, come la misura della temperatura, l’interfaccia di comunicazione HDQ16, la misurazione di carica per ogni singola cella ed il pilotaggio diretto di 4 o 5 LED indicatori di carica. La scelta in ogni caso si è rivelata obbligata poiché esso è l’unico monitor per batterie Ni-MH con interfaccia SMBus compatibile con la TWI [30], presente nel microcontrollore, e non solo HDQ16. Per la TWI (o I2C) infatti esistono librerie di gestione già implementate ed ottimizzate per i microcontrollori della serie megaAVR, mentre per l’HDQ16 l’utilizzo avrebbe significato lo sviluppo di apposito firmware.
Ciascuna linea utilizzata dall’interfaccia SMBus è collegata ai pin del microcontrollore tramite due resistori da 100 Ohm (R26 R27 R31 R32) e un diodo Zener di protezione (D5 D6).
Ai piedini del microcontrollore è collegato un pull-up resistivo (R29 R30) mentre sui piedini
SMBC e SMBD è invece presente un debole pull-down (R28 R33).
Il BQ2060A richiede la presenza di una memoria EEPROM esterna (U6) collegata via I2C ai piedini 2 e 3 (ESCL e ESDA ), sulla quale occorre scrivere alcuni parametri necessari al corretto
Mauro Turturici – Electronic Goalkeeper: studio e progettazione di un ausilio al gioco del Calcio per persone diversamente abili
100 funzionamento come il valore della resistenza di sensing, nello schematico rappresentata da R39, la tecnologia delle batterie ed altri dati.
La programmazione della memoria EEPROM può avvenire direttamente sul circuito mediante un’apposita istruzione inviata al BQ2060A che lo trasforma temporaneamente in buffer trasparente, reindirizzando di fatto ingressi ed uscite direttamente sulla memoria. Questa modalità in pratica pone il monitor batteria in bypass e permette una comunicazione diretta fra il microcontrollore e la EEPROM.
I test points TP5, TP6, TP7 e TP8 sono stati posizionati per monitorare la connessione fra il microcontrollore e il BQ2060A e fra quest’ultimo e la EEPROM; l’ulteriore utilità i questi contatti è quella di permettere la programmazione della EEPROM direttamente da parte del microcontrollore nel caso vi siano problemi nella modalità di bypass del monitor batteria.
La progettazione ha previsto anche alcuni accorgimenti per garantire il corretto funzionamento del circuito e l’aggiunta di altri elementi, tra cui:
• presa per alimentatore esterno (J2)
• diodo Schottky di protezione contro l’inversione di polarità (D7)
• uno switch di tipo SPDT per selezionare l’alimentazione desiderata (batteria o esterna) • un interruttore per isolare la batteria dal resto del circuito
5.1.3. Modulo Bluetooth
Il transceiver Bluetooth è stato selezionato sulla base della compatibilità con il protocollo HID26 utilizzato da molti dispositivi di puntamento come tastiere, mouse, joystick e quant’altro. Su consiglio dei Relatori è stato selezionato il modulo BlueMod+P25/G2, prodotto dalla tedesca
Stollmann. L’azienda produttrice fornisce su ordinazione il modulo dotato di antenna e già
configurato per essere installato su apparecchiature del tipo citato, tuttavia l’applicazione richiesta dal sistema El.Go. è principalmente quella di autenticazione con periferiche di controllo dotate di questa tecnologia e ricezione degli opportuni comandi, per cui in linea di principio è possibile utilizzare anche un altro modulo Bluetooth dotato di firmware di tipo general purpose.
La connessione del modulo Bluetooth al microcontrollore avviene mediante interfaccia UART, come illustrato nella Figura 59.
Mauro Turturici – Electronic Goalkeeper: studio e progettazione di un ausilio al gioco del Calcio per persone diversamente abili
101
Figura 59 – Dettaglio della connessione tramite interfaccia UART
Il chip Bluetooth è stato montato su di un modulo separato rispetto alla scheda madre che ospita il microcontrollore, questa scelta è stata effettuata per poter permettere un’eventuale futura sostituzione in caso di guasto o nell’eventualità in cui il modello selezionato non venga fornito dalla casa produttrice in tempi adeguati allo sviluppo.
In Figura 60 è riportato lo schematico relativo alla scheda che ospita il modulo Bluetooth
Mauro Turturici – Electronic Goalkeeper: studio e progettazione di un ausilio al gioco del Calcio per persone diversamente abili
102 MH6 M HOLE2 MH5 M HOLE2 MH7 M HOLE2 MH8 M HOLE2
L'alimentazione VCC_3.3V viene presa dall'esterno mediante il connettore J10
5 - AT_BT_UART_DCD 4 - /AT_BT_RESET 3 - /AT_BT_UART_RTS 7 - BT_RXD 6 - BT_TXD 1 - VCC_3.3V 2 - /AT_BT_UART_CTS 8 - GND Q10 PNP BEC 1 2 3 Q9 PNP BEC 1 2 3 Title
Size Document Number Rev
Date: Sheet of
Mauro Turturici 1.2
El.Go. BlueTooth Board BT MODULE A 11 12 Thursday , September 09, 2010 R75 47k R77 47k R74 47k R72 47k R69 150 D9 LED C25 10uF R73 47k J12 HEADER 8 1 2 3 4 5 6 7 8 DCE U12 STOLLMANN_BLUEMOD+P25/G2 G N D 1 U A R T _ T X D 4 U A R T _ R X D 5 U A R T _ R T S 3 U A R T _ C T S 6 A N T 2 G P IO [9 ]/ P C M _ C L K 7 G P IO [1 0 ]/ P C M _ O /T X D 3 8 G P IO [7 ]/ P C M _ S Y N C 9 G N D 2 1 0 ATRST/SPI2_MISO 11 GPIO[8]/PCM_I/RXD3 12 ATDI/SPI2_CS 13 ATMS 14
RESERVED (LEAVE OPEN)
15 VCC 16 RESET# 17 G N D 3 1 8 G P IO [1 4 ] 1 9 G P IO [1 3 ] 2 0 G P IO [1 5 ] 2 1 G P IO [6 ]/ A D C 2 2 A T D O /S P I2 _ S C K 2 3 A T C K 2 4 G P IO [3 ]/ S P I_ C L K 2 5 G P IO [0 ]/ S P I_ M O S I 2 6 G N D 4 2 7 GPIO[2]/SPI_CS 28 GPIO[1]/SPI_MISO 29 GPIO[5]/TXD2 30 GPIO[4]/RXD2 31 USB_DN 32 USB_DP 33 GPIO[17]/TAMPER 34 GPIO[16]/SPI2_MOSI A GPIO[12]/I2C_SCL B GPIO[11]/I2C_SDA C VBAT D R68 150 R71 1k R70 1k R76 47k D10 LED
Figura 60 – Schematico della scheda che ospita il modulo Bluetooth
Fra le caratteristiche elettriche del BlueMod+P25/G2 è riportato un vincolo importante riguardo il
ripple della tensione di alimentazione: essa deve essere al più pari a 10 mVRMS, per frequenze
minori di 10MHz [31].
Al fine di verificare questo aspetto è necessario fare riferimento al datasheet del regolatore LM3671 [32] e ricavare gli opportuni dati attraverso le formule indicate, riportate per completezza nel seguito.
Il valore cercato si ricava mediante l’Equazione 13
2 2
PP RMS PP C PP ESR
V − = V − +V −
Equazione 13 – Formula per il calcolo di VRIPPLE
I termini che lo compongono si calcolano quindi tramite le equazioni 12, 13 e 14, in cui:
Mauro Turturici – Electronic Goalkeeper: studio e progettazione di un ausilio al gioco del Calcio per persone diversamente abili
103 • la quantità C si riferisce alla capacità del condensatore posto fra l’induttore e massa, il cui
valore nominale è pari a 10 µF
• la quantità L si riferisce all’induttanza dell’induttore posto fra l’uscita SW e il condensatore C, il suo valore nominale è 2.2 µH
• la quantità RESR rappresenta la Equivalent Series Resistance ovvero la resistenza parassita
del condensatore C che, dalle proprietà del condensatore scelto (X7R) alla frequenza f, si stima abbia un valore di circa 2 mOhm [33]
1 2 IN OUT OUT RIPPLE IN V V V I L V f − = ⋅
Equazione 14 – Formula per il calcolo di IRIPPLE
4 RIPPLE PP C I V f c − = ⋅ ⋅
Equazione 15 – Formula per il calcolo di VPP-C
2
PP ESR RIPPLE ESR
V − = ⋅I ⋅R
Equazione 16 – Formula per il calcolo di VPP-ESR
Inserendo gli opportuni valori si ottiene VPP-RMS pari a 5.8 mV, valore compatibile con il requisito
imposto dal modulo Bluetooth Stollmann.
5.1.4. Display
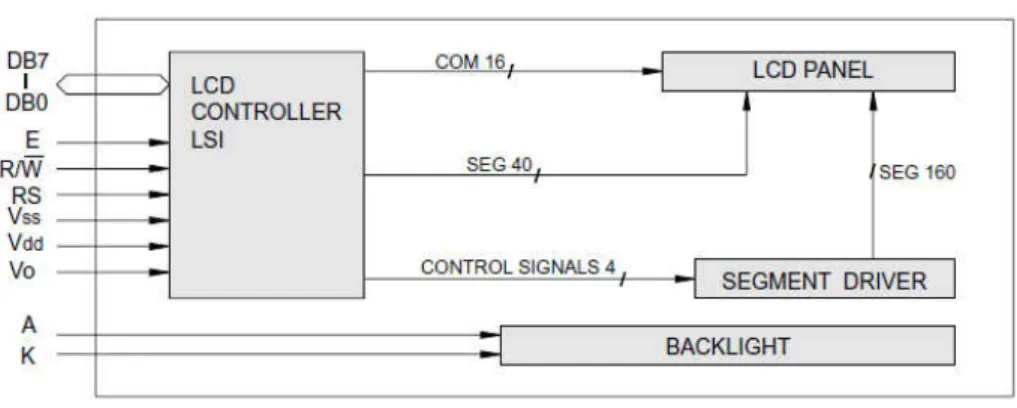
Il display è dotato di un proprio integrato di controllo compatibile con lo standard usato dal modello HD44780; per visualizzare informazioni sul display è sufficiente scrivere in una memoria dell’integrato, il quale si occupa automaticamente di aggiornare i pixel per formare i caratteri e mantenere lo stato attuale fino a nuovo aggiornamento.
Per ragioni di economicità e reperibilità si è scelto di usare un display in tecnologia LCD, piuttosto che un PLED/OLED, che permette una lettura più nitida ma è più costoso e meno disponibile sul mercato.
Il display selezionato è il Powertip PC2004-A di produzione cinese. I due motivi che hanno guidato la scelta sono:
• possibilità di alimentazione a 3.3 V della logica • prezzo vantaggioso
Mauro Turturici – Electronic Goalkeeper: studio e progettazione di un ausilio al gioco del Calcio per persone diversamente abili
104 Per questo oggetto non risulta reperibile on-line un datasheet completo e dettagliato, ma solo una pagina che ne riporta le dimensioni fisiche ed alcuni dei parametri elettrici di maggiore importanza come la tensione di alimentazione ed il consumo.
Lo schema a blocchi del dispositivo, con la piedinatura relativa, è riportato in Figura 61.
Figura 61 – Schema a blocchi del display Powertip PC2004-A
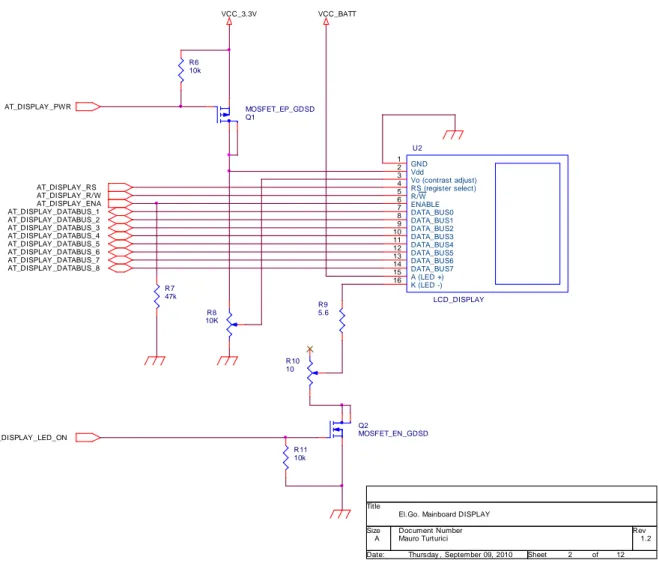
Come si può notare nello schematico riportato in Figura 62, in aggiunta al dispositivo sono stati previsti due interruttori MOS per evitare che esso rimanga acceso consumando energia inutilmente: il primo (Q1) è un PMOS e serve ad attivare il LED di retroilluminazione, l’altro è un PMOS (Q2) utilizzato per dare o togliere alimentazione alla logica.
Mauro Turturici – Electronic Goalkeeper: studio e progettazione di un ausilio al gioco del Calcio per persone diversamente abili
105 Title
Size Document Number Rev
Date: Sheet of
Mauro Turturici 1.2
El.Go. Mainboard DISPLAY A 2 12 Thursday , September 09, 2010 R7 47k R10 10 R6 10k R9 5.6 R8 10K R11 10k U2 LCD_DISPLAY GND 1 Vdd 2 Vo (contrast adjust) 3 RS (register select) 4 R/W 5 ENABLE 6 DATA_BUS0 7 DATA_BUS1 8 DATA_BUS2 9 DATA_BUS3 10 DATA_BUS4 11 DATA_BUS5 12 DATA_BUS6 13 DATA_BUS7 14 A (LED +) 15 K (LED -) 16 AT_DISPLAY _DATABUS_1 AT_DISPLAY _PWR AT_DISPLAY _LED_ON AT_DISPLAY _DATABUS_4 AT_DISPLAY _DATABUS_3 AT_DISPLAY _DATABUS_2 AT_DISPLAY _DATABUS_6 AT_DISPLAY _DATABUS_5 AT_DISPLAY _RS AT_DISPLAY _DATABUS_8 AT_DISPLAY _DATABUS_7 AT_DISPLAY _ENA AT_DISPLAY _R/W Q2 MOSFET_EN_GDSD Q1 MOSFET_EP_GDSD
Figura 62 – Schematico della sezione relativa al display
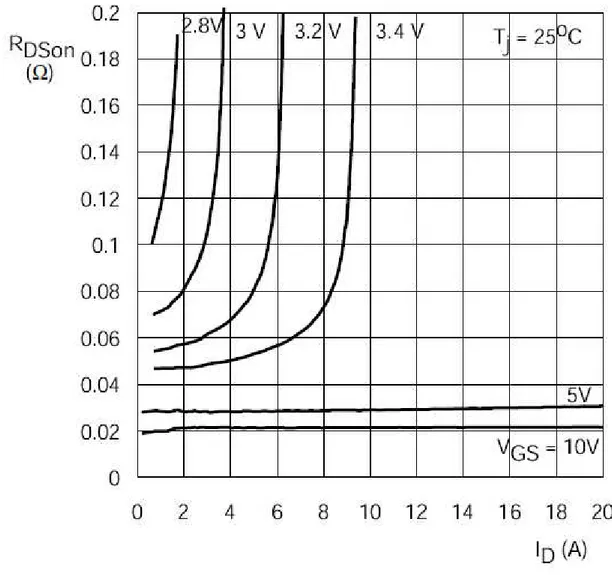
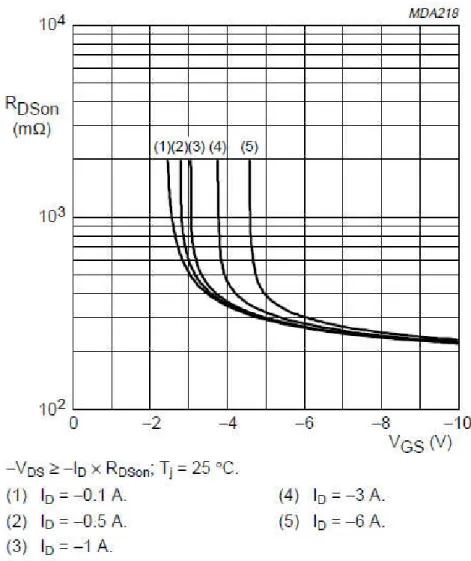
La scelta dei due transistori è stata effettuata fra quelli di bassa resistenza drain-source in conduzione (RDS-on), vedi Tabella 14. Per una più approfondita valutazione si vedano i grafici di
Figura 63 e Figura 64.
Componente Condizioni RDS-on drain-source on-state resistance (mΩ)
NMOS NXP-BSP030-115 VGS = 4.5 V; ID = 2.5 A typ. 30
max. 50
PMOS NXP-BSP250 VGS = -10 V ; ID = -1 A max. 250
Mauro Turturici – Electronic Goalkeeper: studio e progettazione di un ausilio al gioco del Calcio per persone diversamente abili
106
Mauro Turturici – Electronic Goalkeeper: studio e progettazione di un ausilio al gioco del Calcio per persone diversamente abili
107
Figura 64 – Grafico RDS-on in funzione di VGS e ID per il PMOS BSP250
Gli altri elementi significativi sono il trimmer da 10 kΩ (R8), necessario per la regolazione del contrasto e la serie del resistore R9 con il trimmer R10, rispettivamente da 5.6 Ω e 10 Ω, inseriti per poter regolare agevolmente l’intensità luminosa del LED di retroilluminazione. Il dimensionamento di questi ultimi è stato fatto considerando che la VCC_BATT abbia un valore massimo di 5.6 V: sottraendovi la caduta nominale ai capi del diodo di retroilluminazione (4.2 V) e dividendo per la corrente tipica di 260 mA [34] si ottiene un valore che approssimato per eccesso risulta essere quello scelto.
5.1.5.Terminale di controllo wired
Come già citato nel paragrafo 1.3.1 molti dei sensori dedicati alle persone diversamente abili si collegano mediante un connettore jack maschio da 3.5 mm. Si sono perciò inserite nel circuito 4 prese jack female 3.5 mm connesse direttamente agli ingressi dotati di convertitore A/D del microcontrollore. Questo accorgimento permette inoltre di poter utilizzare uno o più trasduttori
Mauro Turturici – Electronic Goalkeeper: studio e progettazione di un ausilio al gioco del Calcio per persone diversamente abili
108 potenziometrici come ad esempio slider lineari o joystick, la cui resistenza, opportunamente collegata ad una fonte di alimentazione, può agire da partitore di tensione permettendo di implementare un comando di tipo proporzionale.
Come illustrato nel capitolo 2 le modalità con le quali si desidera utilizzare il gioco sono tre: una con soli due interruttori, un’altra con quattro e la terza con un trasduttore di posizione; inoltre si ha la possibilità di usare un terminale che comunichi via Bluetooth. Occorre quindi un selettore che permetta la scelta fra queste modalità determinando una corretta gestione del dispositivo da parte del microcontrollore.
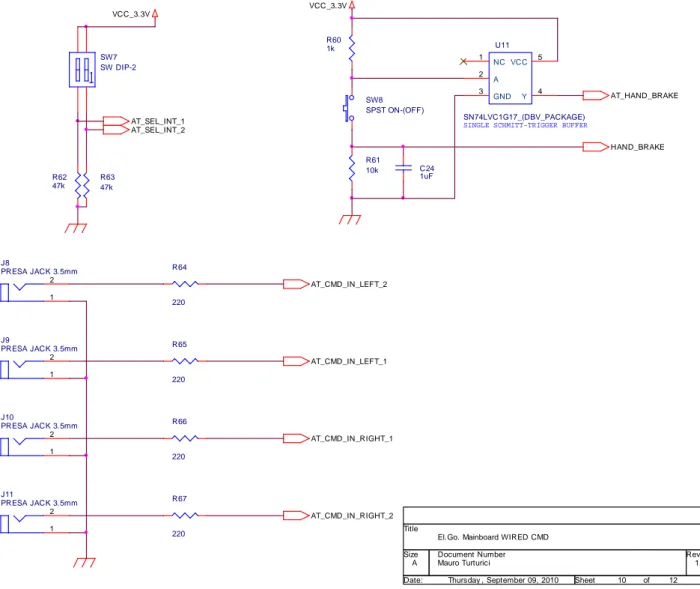
Data la dotazione di interfaccia utente con tastiera e display la selezione fra le varie modalità può esser effettuata tramite questa, su indicazione dell’utente o di altra persona, attraverso un apposito menù; si è comunque preferito inserire un selettore esterno aggiuntivo per non dover attendere lo sviluppo del firmware relativo al menù di sistema ed alla gestione della tastiera e poter disporre della stessa funzionalità con facilità in fase di sviluppo. Questo selettore è costituito da due switch di tipo DIP, vedi Figura 65.
Figura 65 – DIP switch
Mauro Turturici – Electronic Goalkeeper: studio e progettazione di un ausilio al gioco del Calcio per persone diversamente abili
109 Title
Size Document Number Rev
Date: Sheet of
Mauro Turturici 1.2
El.Go. Mainboard WIRED CMD
A 10 12 Thursday , September 09, 2010 R63 47k J9 PRESA JACK 3.5mm 2 1 R62 47k SW8 SPST ON-(OFF) R61 10k J8 PRESA JACK 3.5mm 2 1 J10 PRESA JACK 3.5mm 2 1
SINGLE SCHMITT-TRIGGER BUFFER
U11 SN74LVC1G17_(DBV_PACKAGE) NC 1 A 2 GND 3 Y 4 VCC 5 R60 1k C24 1uF J11 PRESA JACK 3.5mm 2 1 R64 220 AT_CMD_IN_RIGHT_2 AT_CMD_IN_RIGHT_1 AT_SEL_INT_2 AT_SEL_INT_1 AT_HAND_BRAKE AT_CMD_IN_LEFT_1 AT_CMD_IN_LEFT_2 HAND_BRAKE VCC_3.3V SW7 SW DIP-2 R65 220 R66 220 R67 220
Figura 66 – Schematico della sezione relativa ai connettori del controllo cablato
Le due resistenze R62 ed R63, hanno lo scopo di garantire il livello logico basso quando gli interruttori del DIP switch sono aperti.
Il valore di queste è stato scelto sulla base delle seguenti considerazioni:
• un valore troppo basso di resistenza porterebbe ad uno spreco di energia in quanto attivando uno o entrambi gli interruttori scorrerebbe una corrente che non è di alcuna utilità al circuito
• le possibili correnti di leakage sui piedini del microcontrollore, di valore dell’ordine di 1 µA nel caso di valori molto alti delle resistenze per evitare un inutile consumo di corrente, potrebbero causare una caduta non trascurabile sulle stesse, causando un riconoscimento errato del livello basso sui relativi piedini
Dalle caratteristiche elettriche dell’ATmega128L (cfr. Tabella 10) emerge che il livello logico basso con l’alimentazione utilizzata viene riconosciuto fino a circa 0.66 V, valore che limita
Mauro Turturici – Electronic Goalkeeper: studio e progettazione di un ausilio al gioco del Calcio per persone diversamente abili
110 l’utilizzo di resistenze fino a 650 kΩ, tuttavia per mantenersi ben al disotto di questa soglia si è ritenuto possibile utilizzare valori di 47 kΩ, che causerebbero correnti nelle resistenze ci circa 70/140 µA nel caso di uno o entrambi gli interruttori attivati, correnti ritenute trascurabili.
Nella Figura 66 si osserva in alto a destra il freno di emergenza (SW8), costituito da un pulsante di tipo SPST-NC (Normally Closed). L’apertura dell’interruttore causa la presenza di un livello alto prossimo a VCC_3.3V.
La pressione di questo tasto (evento di emergenza) va comunicata sia al microcontrollore che al driver motore, a tale proposito non si è ritenuta opportuna una connessione diretta che mettesse in cortocircuito i due ingressi, inserendo perciò fra i due circuiti un buffer con lo scopo di isolare il piedino AT_HAND_BRAKE collegato all’ATmega128L dal circuito riportato in Figura 74 e collegato alla porta HAND_BRAKE.
Infine si osservano in basso a sinistra i connettori jack female già introdotti, dotati di apposita resistenza di protezione per limitare le correnti in uscita dal microcontrollore nel caso di erronea configurazione come uscite delle relative porte durante la fase di sviluppo del firmware.
5.1.6. Tastierino ed encoder
Il tastierino utilizzato è mostrato in Figura 67.
Mauro Turturici – Electronic Goalkeeper: studio e progettazione di un ausilio al gioco del Calcio per persone diversamente abili
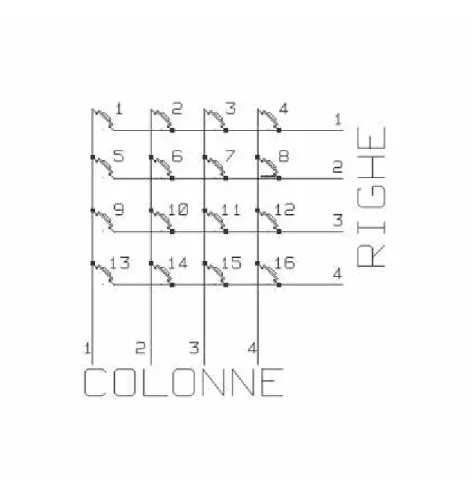
111 Esso consiste in una matrice di 8 conduttori disposti su 4 righe e 4 colonne, ogni incrocio riga-colonna è dotato di un pulsante di tipo SPST-NO, vedi Figura 68, che cortocircuita la riga con la colonna. Inviando perciò una tensione su un’unica colonna e premendo uno dei 4 pulsanti presenti su essa, si avrà questa tensione riportata sulla riga corrispondente. Con una scansione delle colonne a frequenza opportuna si può quindi determinare quale sia il pulsante premuto sulla base della riga su cui arriva tensione in relazione alla colonna attiva al momento.
Figura 68 – Schema elettrico di un tastierino a matrice
Le caratteristiche di questi oggetti variano, da modello a modello, principalmente in relazione alla resistenza di contatto, all’isolamento delle linee conduttive, alla protezione ESD27, alla solidità ed alla affidabilità nel tempo. A livello circuitale invece il funzionamento è identico e prevede l’utilizzo di un apposito circuito (detto encoder o controller) che effettui la lettura mediante scansione e codifichi l’uscita del pulsante premuto.
In Figura 69 è riportato lo schema a blocchi dell’intero circuito formato da tastierino e relativo
encoder, in cui si è evidenziato in rosso il tastierino.
Mauro Turturici – Electronic Goalkeeper: studio e progettazione di un ausilio al gioco del Calcio per persone diversamente abili
112
Figura 69 – Schema a blocchi di tastierino ed encoder
Come introdotto l’encoder esegue una scansione ciclica delle colonne ad una frequenza opportuna (tipicamente compresa fra 80 e 800 Hz); esse vengono mantenute a VCC e portate alternativamente
ad una tensione pari a GND per un breve intervallo, per cui se in quel momento viene eseguita una pressione su di un tasto qualsiasi la combinazione fra colonna scandita e riga sulla quale si registra l’impulso attivo indica univocamente il tasto premuto. A questo seguono l’accensione del piedino DATA AVAILABLE che comunica all’host la presenza di un dato, quindi l’attesa di un impulso basso sul piedino OUTPUT ENABLE, il quale causa l’uscita del codice rappresentante il pulsante premuto sui piedini OUTPUTS (4 per l’encoder di 16 tasti 5 per quello di 20 tasti).
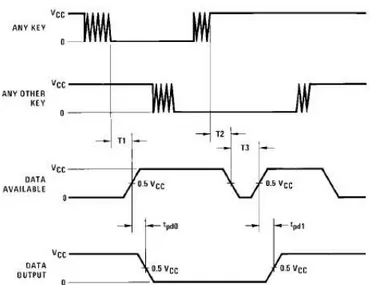
Una funzione molto importante è la keybounce mask, operata dal blocco KEYBOUNCE ELIMINATION, ovvero un sistema che elimina gli impulsi multipli che si registrano alla pressione di ogni normale interruttore meccanico. Nella Figura 70 è mostrato un esempio di temporizzazione per i piedini DATA AVAILABLE e DATA OUTPUT; si può notare che il secondo tasto premuto viene ignorato dal sistema, perciò fintantoché l’attuale codice non viene prelevato il circuito rimane in attesa e non percepisce la pressione di un nuovo pulsante.
Mauro Turturici – Electronic Goalkeeper: studio e progettazione di un ausilio al gioco del Calcio per persone diversamente abili
113
Figura 70 – Esempio di temporizzazione di DATA AVAILABLE e DATA OUTPUT
Per completezza nelle immagini di Figura 71 e Figura 72 sono riportati rispettivamente il pinout del Fairchild MM74C922 selezionato per l’impiego nel circuito e lo schematico del circuito relativo al tastierino e all’encoder.
Mauro Turturici – Electronic Goalkeeper: studio e progettazione di un ausilio al gioco del Calcio per persone diversamente abili
114 Title
Size Document Number Rev
Date: Sheet of
Mauro Turturici 1.2
El.Go. Mainboard KEY BOARD A 4 12 Thursday , September 09, 2010 C8 10uF C7 1uF R13 47k 4x4 MATRIX SPST-NO KP1 KEY PAD_4x4 ROW1 5 ROW2 6 ROW3 7 ROW4 8 C O L U M N 1 1 C O L U M N 2 2 C O L U M N 3 3 C O L U M N 4 4 16-Key Encoder U5 MM74C922_(SOIC_PACKAGE) ROW_Y 1 1 ROW_Y 2 2 ROW_Y 3 3 ROW_Y 4 4 OSCILLATOR 6 KEY BOUNCE_MASK 7 COLUMN_X1 12 COLUMN_X2 11 COLUMN_X3 9 COLUMN_X4 8 GND 10 DATA_AVAILABLE 13 OUTPUT_ENABLE 14 DATA_OUT_A 19 DATA_OUT_B 18 DATA_OUT_C 17 DATA_OUT_D 16 VCC 20 NC 5 NC 15 R14 47k AT_74C922_DATA_B AT_74C922_DATA_A AT_74C922_OE AT_74C922_DATA_D AT_74C922_DATA_C AT_74C922_DATA_AV VCC_3.3V
Figura 72 – Schematico del circuito relativo al tastierino e all’ encoder
Le capacità C7 e C8 sono di valore consigliato nell’application note dell’integrato [35], ed occorrono rispettivamente per l’oscillatore che determina la scansione delle colonne e per la funzione di keybounce mask.
5.1.7. Driver/Receiver RS-232
Come descritto nel paragrafo 4.4 il driver motore viene comandato in modalità RS-232 tramite una comunicazione seriale rispondente allo standard EIA RS-232v28, il quale specifica per questo tipo di comunicazione l’utilizzo di tensioni di valore assoluto mai inferiori a 3 V, sia positivi che negativi. In particolare una tensione compresa fra 3 V e 15 V corrisponde ad uno zero logico, viceversa una fra -3 V e -15 V all’uno logico.
Per questo motivo si è reso necessario l’utilizzo di un apposito driver/receiver in quanto i livelli logici del microcontrollore si attestano fra GND e VCC.
Il driver/receiver RS-232 selezionato è prodotto dalla Texas Instruments, le sue caratteristiche più importanti sono riportate nel seguito.
• RS-232 Bus-Pin ESD Protection Exceeds ±15 kV Using Human-Body Model (HBM)
• Meets or Exceeds the Requirements of TIA/EIA-232-F and ITU v.28 Standards
• Operates With 3-V to 5.5-V VCC Supply
• Operates Up To 250 kbit/s
Mauro Turturici – Electronic Goalkeeper: studio e progettazione di un ausilio al gioco del Calcio per persone diversamente abili
115
• Low Standby Current 1 µA Typical
• External Capacitors 4 × 0.1 µF
• Accepts 5-V Logic Input With 3.3-V Supply
• Auto-Powerdown Feature Automatically
• Disables Drivers for Power Savings
Il dispositivo funziona sia con alimentazione a 3.3 V che 5 V a patto di collegare le opportune capacità ai piedini del circuito come mostrato in Tabella 15; nell’applicazione specifica si è perciò utilizzato la modalità a 3.3 V, collegando quindi ai piedini dell’integrato 4 condensatori da 100 nF.
Tabella 15 – Valori delle capacità consigliate
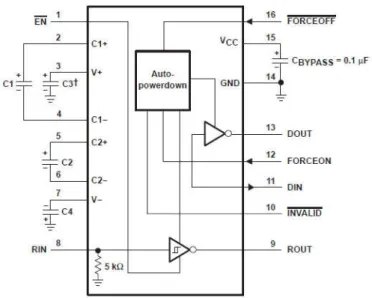
In Figura 73 sono invece mostrati il circuito tipico e la piedinatura dell’integrato.
Figura 73 – Applicazione tipica per il TI MAX3221 e pinout
Mauro Turturici – Electronic Goalkeeper: studio e progettazione di un ausilio al gioco del Calcio per persone diversamente abili
116 CN2 D_SUB_15_MALE 2A_D_OUT_C 1 RxD 2 TxD 3 D_IN_F 4 GND 5 UNUSED 6 UNUSED 7 D_IN_E 8 2A_D_OUT_C 9 A_IN_2 10 A_IN_1 11 A_IN_3 12 GND 13 +5_OUT 14 EME_STOP 15
nel driver c'è un pull-up interno a 5V con 10k
AX1500SC
Title
Size Document Number Rev
Date: Sheet of
Mauro Turturici 1.3
El.Go. Mainboard RS-232 DRIVER
A 7 12 Thursday , September 09, 2010 Q7 NPN BEC R40 10k C17 100nF
Single-Channel RS-232 Line Driver/Receiver
U9 MAX3221 EN 1 C1+ 2 V+ 3 C1-4 C2+ 5 C2-6 V-7 RIN 8 ROUT 9 INVALID 10 DIN 11 FORCEON 12 DOUT 13 GND 14 VCC 15 FORCEOFF 16 C18 100nF R42 1k Q8 NPN BEC R41 1k C20 100nF C19 100nF C16 100nF AT_RS232_TXD AT_RS232_INVALID AT_RS232_ENA AT_BRAKE AT_RS232_RXD VCC_3.3V HAND_BRAKE VCC_3.3V
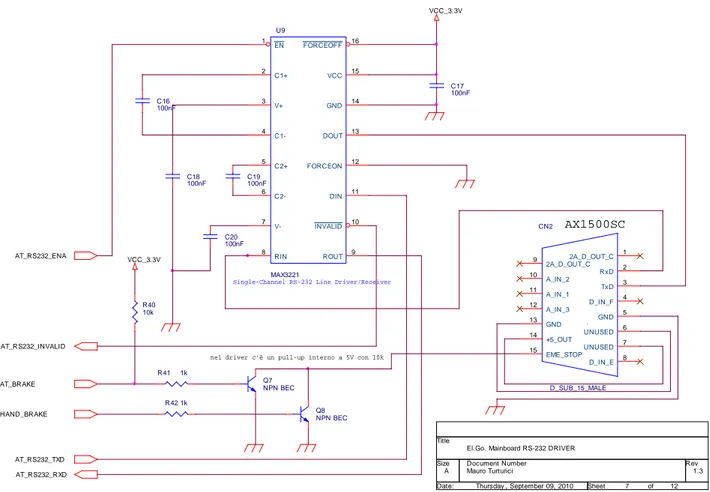
Figura 74 – Schematico della sezione relativa al driver/receiver RS232
Nella Figura 74 in basso a sinistra (Q7 Q8) si può inoltre notare la soluzione adottata per il freno di emergenza, ovvero uno schema analogo ad una porta logica AND di tipo open collector.
Il circuito interno al driver motore che gestisce il freno di emergenza è riportato in Figura 75, si tratta di un pull-up a 5 V con un resistore da 10 kΩ.
Figura 75 – Circuito del freno di emergenza interno al driver motore
Per attivare il freno occorre quindi un pull-down collegato al piedino 15. Per poter attivare questo dispositivo sia attraverso il microcontrollore che con il pulsante manuale sono stati inseriti i transistori Q7 e Q8. La resistenza R40 mantiene attivato il freno fino a che il microcontrollore
Mauro Turturici – Electronic Goalkeeper: studio e progettazione di un ausilio al gioco del Calcio per persone diversamente abili
117 non abbassa il piedino AT_BRAKE, le resistenze R41 e R42 sulla base di Q7 e Q8 sono dimensionate in modo da mandare gli stessi in saturazione.
5.1.8.LED e Test point
Al fine di garantire una diagnostica di base, per l’utente e/o un eventuale assistente, riguardo lo stato del sistema si è pensato di inserire alcuni LED, ciascuno dei quali indichi uno stato di funzionamento o un avviso.
Si è previsto in fase progettuale quali siano le informazioni che sia utile comunicare all’esterno per fini diagnostici:
• sistema acceso e correttamente inizializzato
• corretta ricezione di comandi, sia Bluetooth che da terminale wired • batteria scarica
• errore generico del sistema
È altresì plausibile che durante lo sviluppo del firmware si decida di utilizzare combinazioni di LED o luci ad intermittenza al fine di segnalare errori o stati ben precisi per quanto riguarda il funzionamento del sistema. In ogni caso lo scopo della progettazione elettronica è stato quello di prevedere l’hardware necessario a consentire tali possibilità, di cui è riportato lo schematico in Figura 76.
Mauro Turturici – Electronic Goalkeeper: studio e progettazione di un ausilio al gioco del Calcio per persone diversamente abili
118 Title
Size Document Number Rev
Date: Sheet of
Mauro Turturici 1.2
El.Go. Mainboard LEDS & TEST POINT
A 5 12 Thursday , September 09, 2010 TP2 TEST POINT 1 R16 150 D2 LED_R R18 150 R17 120 Q5 NPN BEC Q3 NPN BEC D1 LED_G R20 1k R22 1k D4 LED_Y R15 120 R19 1k Q6 NPN BEC Q4 NPN BEC R21 1k D3 LED_G AT_TEST_POINT AT_LED_2 AT_LED_1 VCC_BATT AT_LED_4 AT_LED_3
Figura 76 – Schematico della sezione relativa ai LED e al test point
I diversi valori delle resistenze in serie ai diodi sono stati calcolati sulla base della corrente massima che vi può scorrere (differente per ragioni tecnologiche in LED di diverso colore) e della tensione minima ai capi del diodo, anch’essa differente per i vari LED. Oltre a questi dati si considera una tensione massima VCC_BATT pari a 5.6 V ed una VCE-SAT trascurabile per i
transistori Q3, Q4, Q5 e Q6, vedi Figura 77.
Nella Tabella 16 sono mostrati i dati citati, le resistenze limite per ciascun tipo di LED impiegato nel circuito e le resistenze impiegate nel circuito; riguardo queste ultime, sapendo che la corrente tipica per ciascun LED è pari a 20 mA, si sono scelti valori di resistenza superiori a quelli minimi e che rendano la corrente prossima a 20 mA.
LED Corrente massima (mA) Tensione minima ai capi (V) Resistenza minima (Ω) VCC_BATT= 5.6 V e VCE-SAT = 0 V Resistenza nel circuito (Ω) IF ≈ 20 mA AlGaAs Red IF = 300 1.6 13 120 Yellow IF = 60 1.5 68 150 Green IF = 90 1.5 45 150
Mauro Turturici – Electronic Goalkeeper: studio e progettazione di un ausilio al gioco del Calcio per persone diversamente abili
119
Figura 77 – Andamento tipico della VCE-SAT
La Figura 77 è utile anche per ricavare il valore di resistenza da porre sulla base dei transistori pilota, si nota infatti in alto a sinistra il rapporto tipico IC/IB in condizioni di saturazione, cioè 20.
La corrente nominale che scorre nel LED è pari a 20 mA come mostrato nella Tabella 16, si ha perciò che la corrente di base del BJT pilota deve necessariamente superare 1 mA. Supponendo una VBE del transistor di 0.7 V ed un livello logico alto di 3.3 V si ha che il valore massimo di
resistenza da porre sulla base dei transistori pilota è di 2.6 kΩ. Ponendo quindi una resistenza da 1 kΩ si garantisce una corretta saturazione degli stessi.
Nello schematico, unitamente alla circuiteria utile al funzionamento dei LED si nota un test point pilotato dal microcontrollore, utile al progettista in fase di messa a punto del sistema ad esempio per verificare la corretta esecuzione del firmware del microcontrollore. Anche se inizialmente la volontà del progettista sarebbe stata quella di inserirne almeno 3 è stato necessario rinunciare a questa funzionalità per utilizzare altri due piedini del microcontrollore per altre funzioni.
Mauro Turturici – Electronic Goalkeeper: studio e progettazione di un ausilio al gioco del Calcio per persone diversamente abili
120
5.1.9. Connessione per In-Circuit Serial Programming (ISP)
Benché l’ATMega128 disponga di un’interfaccia SPI28 collegata ai piedini PB0, PB1, PB2 e
PB3 nel rispettivo datasheet [36] è specificato che per la modalità di programmazione ISP i piedini utilizzati sono in parte diversi, ovvero MOSI e MISO vengono mappati rispettivamente su
PE0 e PE1, mentre il pin del clock (SCK) rimane invariato ed il piedino /SS29 non è utilizzato. Dato che la programmazione avviene con scrittura sulla memoria del microcontrollore (Flash o EEPROM) quest’ultimo si configura come slave, mentre il ruolo del master viene ricoperto dal programmatore.
Tabella 17 – Piedini utilizzati per la programmazione ISP
Il datasheet descrive l’intera sequenza di operazioni da eseguire per la corretta programmazione in questa modalità, è interessante analizzare tali passi per poter garantire una completa possibilità di esecuzione. Si riportano alcuni di questi passi, i più significativi dal punto di vista progettuale.
“To program and verify the ATmega128 in the SPI Serial Programming mode, the following sequence is recommended:
1. Power-up sequence: Apply power between VCC and GND while RESET and SCK are set to “0”. In some systems, the programmer can not guarantee that SCK is held low during power-up. In this case, RESET must be given a positive pulse of at least two CPU clock cycles duration after SCK has been set to “0”.
As an alternative to using the RESET signal, PEN can be held low during Power-on Reset while SCK is set to “0”. In this case, only the PEN value at Power-on Reset is important. If the programmer cannot guarantee that SCK is held low during power-up, the PEN method cannot be used. The device must be powered down in order to commence normal operation when using this method.
2. Wait for at least 20 ms and enable SPI Serial Programming by sending the Programming Enable serial instruction to pin MOSI.
...
Power-off sequence (if needed): Set RESET to “1”.
Turn VCC power off.”
28 Serial Peripheral Interface 29 Slave Select
Mauro Turturici – Electronic Goalkeeper: studio e progettazione di un ausilio al gioco del Calcio per persone diversamente abili
121 Dal pinout visibile in Figura 52 risulta che i piedini PE0 e PE1 sono utilizzati anche dall’interfaccia UART0 (rispettivamente RXD0 e TXD0); l’impiego di tali pin risulta perciò a comune fra le due funzionalità, motivo per cui occorre prevedere un apposito circuito che permetta la condivisione degli stessi, garantendo integrità dell’informazione e assenza di conflitti elettrici. La soluzione adottata, mostrata nello schematico di Figura 78, si avvale si uno switch SPDT30 (SW2), di un inverter (U3) e di 4 buffer three-state disponibili su un unico integrato (U4).
Title
Size Document Number Rev
Date: Sheet of
Mauro Turturici 1.2
El.Go. Mainboard ISP CONN
A 3 12 Thursday , September 09, 2010 INVERTERS U3 74LVC04A 1A 1 1Y 2 2Y 4 2A 3 3A 5 GND 7 3Y 6 VCC 14 6A 13 5Y 10 4Y 8 5A 11 4A 9 6Y 12
QUAD BUFFER/LINE DRIVER
U4 74LVC126A 1OE 1 1A 2 1Y 3 2A 5 2OE 4 2Y 6 GND 7 3Y 8 VCC 14 4OE 13 4A 12 4Y 11 3OE 10 3A 9 SW2 SPDT ON-ON R12 47k STK500 Manual pg.51 CN1 ISP_6PIN_CONNECTOR MISO 1 VTG 2 SCK 3 MOSI 4 RST 5 GND 6 AT_ISP_SCK AT_BT_TXD0_(ISP_MISO) AT_BT_RXD0_(ISP_MOSI) /AT_ISP_RST BT_RXD BT_TXD VCC_3.3V VCC_3.3V VCC_3.3V PROGRAMMAZIONE NORMALE UTILIZZO
Figura 78 – Schematico del circuito per la connessione ISP
Quando lo switch è collegato a VCC_3.3V risulta che i buffer 1 e 2 sono attivati, perciò trasparenti all’ingresso, in questo modo si connette il piedino MOSI che trasporta i dati provenienti dal programmatore al piedino PE0 del microcontrollore, e contemporaneamente il piedino PE1, per i dati in uscita dall’ATmega128L, risulta collegato con il MISO del connettore ISP. In questa situazione i buffer 3 e 4 sono disattivati poiché hanno l’enable collegato all’uscita di un inverter che ha in ingresso la tensione VCC_3.3V.
Mauro Turturici – Electronic Goalkeeper: studio e progettazione di un ausilio al gioco del Calcio per persone diversamente abili
122 Viceversa quando viene collegato lo switch a GND in uscita dall’inverter si avrà un livello alto, questo attiva i buffer 3 e 4 mentre i buffer 1 e 2 che hanno l’output enable direttamente collegato al piedino comune dello switch risultano disattivati. In questa situazione si ha che il segnale
BT_RXD proveniente dal modulo Bluetooth pilota il pin di ricezione del microcontrollore,
analogamente il segnale seriale TXD0 in uscita dall’ATmega128L pilota il piedino BT_TXD, completando la connessione.
La presenza della resistenza R12 infine garantisce che l’intero circuito non si trovi in condizione di programmazione, bensì di funzionamento del modulo Bluetooth, nel caso in cui lo switch dovesse trovarsi in posizione intermedia.
5.1.10. Circuiti di start e stop
Il circuito di accensione e spegnimento progettato si avvale di due interruttori, una porta logica OR, due pulsanti SPST-NO ed alcuni elementi attivi e passivi.
Nella Figura 79 è mostrato lo schematico relativo ai due circuiti, quello di stop in alto a sinistra, quello di start in basso.
R52 10k R58 47k R56 4.7k R53 220
DUAL 2-INPUT POSITIVE-OR GATE
U10 SN74LVC2G32DCTR 1A 1 1B 2 2Y 3 GND 4 2A 5 2B 6 1Y 7 VCC 8 R57 220 R51 1k C21 1uF C22 1uF R55 10k PWR_ENABLE AT_STATUS AT_SHUTDOWN VCC_BATT VCC_BATT VCC_3.3V SW5 SW PUSHBUTTON SW6 SW PUSHBUTTON Q11 MOSFET N GSD Q12 MOSFET P GSD R54 4.7k VCC_BATT VCC_BATT Title
Size Document Number Rev
Date: Sheet of
Mauro Turturici 1.2
El.Go. Mainboard START_STOP
A 9 12 Wednesday , September 15, 2010 C23 1uF R59 10k