121
Capitolo IV
Strategie di modellazione di edifici esistenti in c.a.
4.1 Introduzione
L’analisi sismica di una struttura dovrebbe fornire al progettista la distribuzione delle forze interne e delle deformazioni indotte dal sisma di progetto considerato, in relazione alla strategia progettuale scelta per l’intervento di adeguamento. In particolare, l’analisi dovrebbe indicare quali sono le richieste del sisma (in termini di resistenza e duttilità) in tutti gli elementi strutturali principali preposti all’assorbimento delle azioni orizzontali e/o al trasferimento dei carichi verticali dall’impalcato alla fondazione.
Tutte le norme di recente emanazione, FEMA 457, EC 8 e le NTC, consentono di utilizzare quattro diversi metodi di analisi raggruppabili in due categorie:
• lineari o non lineari;
• statici o dinamici.
L’applicabilità di ognuno di questi metodi risiede essenzialmente nella sua capacità di predire adeguatamente la risposta di una determinata struttura sottoposta ad azioni sismiche, individuando in particolare le sollecitazioni e gli spostamenti indotti nei singoli elementi considerati nel modello di calcolo. Inoltre, la possibilità di utilizzare metodi di analisi lineari o non-lineari dipende dalla conoscenza che si ha della costruzione; infatti, la possibilità di poter definire un modello di calcolo non-lineare in grado di fornire risultati affidabili e rappresentativi della costruzione in esame passa necessariamente dalla conoscenza completa delle proprietà meccaniche dei materiali. Per tale ragione sia l’EC 8 sia le NTC legano i vari metodi di analisi a determinati livelli
122
di conoscenza per lo studio delle costruzioni in cemento armato. La norma FEMA, invece, consente di utilizzare metodi di analisi lineari nel caso si abbiano livello di conoscenza minimi, mentre impone il raggiungimento di un livello di conoscenza esaustivo per l’utilizzo di metodi di analisi non-lineari.
I metodi di analisi elastica (metodi lineari), analisi statica equivalente o analisi
dinamica modale, sono approcci mutuati direttamente dalla progettazione delle nuove
costruzioni in zona sismica in cui viene utilizzato un valore dell’azione sismica di progetto opportunamente ridotto per un fattore di struttura che dipende dal comportamento della struttura a livello complessivo ed a livello del singolo dettaglio strutturale.
Per l’applicazione di tale metodo, perciò, assieme alle verifiche di resistenza, eseguite sulle sollecitazioni di calcolo, troviamo prescrizioni riguardanti la geometria (regolarità e simmetria), la realizzazione dei dettagli costruttivi e la qualità dei materiali impiegati, in modo da ottenere un edificio che si comporti in campo plastico secondo schemi prevedibili con metodi di analisi elastici. Possono essere quindi utilizzati per calcolare gli effetti delle azioni sismiche sia nel caso di sistemi dissipativi, sia nel caso di sistemi non dissipativi.
Un tale approccio non è però direttamente applicabile alle costruzioni esistenti, caratterizzate spesso da configurazioni strutturali, dettagli costruttivi e proprietà meccaniche dei materiali assolutamente scadenti e non conformi a quelli richiesti per le nuove costruzioni e distribuzioni di massa e rigidezza irregolari. Inoltre, risulta piuttosto complicato definire in modo affidabile il fattore di struttura q che la caratterizza per poter considerare implicitamente l’assorbimento in campo non-lineare, essendo tale fattore dipendente fortemente dalle proprietà post-elastiche dei materiali, dalla localizzazione delle deformazioni plastiche nonché dalla configurazione morfologica della costruzione.
Secondo il D.M.14/01/2008 i metodi di analisi lineare possono essere applicati utilizzando lo spettro elastico o quello di progetto, indicando per quest’ultimo un fattore di struttura q compreso tra 1.5 e 3, ed eseguendo, in entrambi i casi le verifiche di deformabilità sugli elementi a comportamento duttile e verifiche di resistenza sugli elementi a comportamento fragile, considerati nella condizione di collasso, ovvero in cui tutti gli elementi duttili ad essi collegati hanno raggiunto la loro resistenza plastica.
123
I metodi di analisi lineare però, a parte il caso in cui una costruzione possieda la resistenza necessaria ad assorbire il sisma in campo elastico, non sono in grado di rappresentare adeguatamente la richiesta del sisma a livello di ogni singolo elemento strutturale. Questo tipo di approccio non è, infatti, in grado di cogliere i cambiamenti nella risposta della struttura che si verificano man mano che i singoli elementi si snervano.
I metodi di analisi non lineare al contrario, tenendo conto di tutti quei fenomeni che contribuiscono al comportamento globalmente non lineare della struttura (grandi spostamenti/rotazioni, effetti del secondo ordine, deformazioni irreversibili, degrado della rigidezza etc.) riescono a fornire utili informazioni sulla distribuzione della domanda di anelasticità nella struttura.
Anche in questo caso le equazioni di equilibrio possono essere trattate in maniera “statica” (analisi statica non lineare o, più comunemente, pushover) o tenendo conto delle caratteristiche dinamiche della struttura (analisi dinamica non lineare).
Essendo ovviamente in questo caso la modellazione più complessa rispetto ad un approccio di tipo lineare, è necessaria una conoscenza più approfondita delle caratteristiche strutturali dell’edificio in esame: proprietà meccaniche dei materiali, condizione dei vari elementi strutturali, dettagli costruttivi, configurazioni geometriche. Tanto più la conoscenza dell’edificio in esame è approfondita, tanto più accurate ed attendibili potranno essere le informazioni ottenute dal modello di calcolo, risultando quindi giustificato l’utilizzo di un metodo di analisi più raffinato.
4.2 Analisi lineari
4.2.1 Analisi statica lineare
Il metodo è basato sulla rappresentazione dell’azione sismica tramite un sistema di forze statiche orizzontali e sul calcolo delle sollecitazioni indotte da tali forze su un sistema elastico lineare. Viene preso in considerazione, in entrambe le direzioni principali della struttura, solo il primo modo di vibrare. Calcolati i periodi propri fondamentali, è possibile ricavare per entrambe le direzioni le massime forze di taglio alla base, i loro
124
contributi lungo l’altezza dell’edificio e quindi, con questi carichi, svolgere un’analisi statica, con la quale si ottengono i valori di domanda da confrontare poi con quelli di capacità.
Un’analisi di questo genere è in grado di dare risultati soddisfacenti nel caso di strutture la cui risposta non è significativamente influenzata da modi elevati di vibrare. Ciò avviene certamente quando sono verificate le condizioni di regolarità in altezza e ciascun periodo proprio fondamentale nelle due direzioni principali risulta minore di 2.5Tc, essendo Tc uno dei parametri dello spettro di risposta elastico. Con il rispetto di quest’ultima condizione si è sicuri che l’accelerazione spettrale del primo modo è paragonabile a quella dei modi più alti di vibrare (che avendo periodi minori, possono cadere nella zona dello spettro prossima alla risonanza) e quindi il contributo di questi ultimi è trascurabile (avendo essi massa partecipante molto minore rispetto a quella associata al modo fondamentale).
4.2.2 Analisi dinamica modale
Questo tipo di analisi è considerato il metodo normale per la definizione delle sollecitazioni di progetto e deve essere applicato usando un modello tridimensionale della struttura. La maggiore differenza con l’analisi statica equivalente consiste nel fatto che nel calcolo dei parametri di risposta del sistema si tiene conto delle caratteristiche dinamiche della struttura tramite l’utilizzo dei modi propri di vibrare.
L’analisi modale, così come è solitamente applicata, prevede di calcolare, tramite l’utilizzo dello spettro di risposta di pseudo-accelerazione, i valori massimi di sollecitazioni e spostamenti associati a ciascun modo di vibrare della struttura supposta elastica lineare, e quindi di combinarli in modo opportuno.
Per il calcolo di questi valori di sollecitazione e deformazione si devono considerare tutti i modi aventi una massa partecipante non trascurabile (superiore al 5%) e comunque un numero di modi la cui massa partecipante totale sia superiore all’85% (p.to 7.3.3.1 delle NTC).
La combinazione degli effetti, in termini di sollecitazioni e spostamenti, avviene poi tramite una combinazione quadratica completa (CQC), il cui coefficiente di
125
combinazione dipende dal rapporto reciproco dei periodi associati a ciascun modo di vibrare.
4.3 Analisi non lineari
I fenomeni che contribuiscono al comportamento globalmente non lineare di una struttura, e che solo questo tipo di analisi è in grado di cogliere, sono di due tipi:
• Non linearità geometrica (grandi spostamenti/rotazioni, effetti del secondo
ordine, effetto trave colonna), introdotta quando la risposta sismica della struttura porta al raggiungimento di livelli di spostamento molto elevati, i quali non variano più in modo proporzionale ai carichi, rendendo non più valida l’ipotesi della teoria dell’elasticità lineare secondo la quale è possibile, in un processo deformativo, confondere configurazione iniziale e finale.
• Non linearità del materiale (deformazioni irreversibili, comportamento ciclico,
degrado della rigidezza e della resistenza, etc.), introdotta quando la risposta sismica della struttura porta i suoi materiali costituenti a superare i limiti del comportamento elastico.
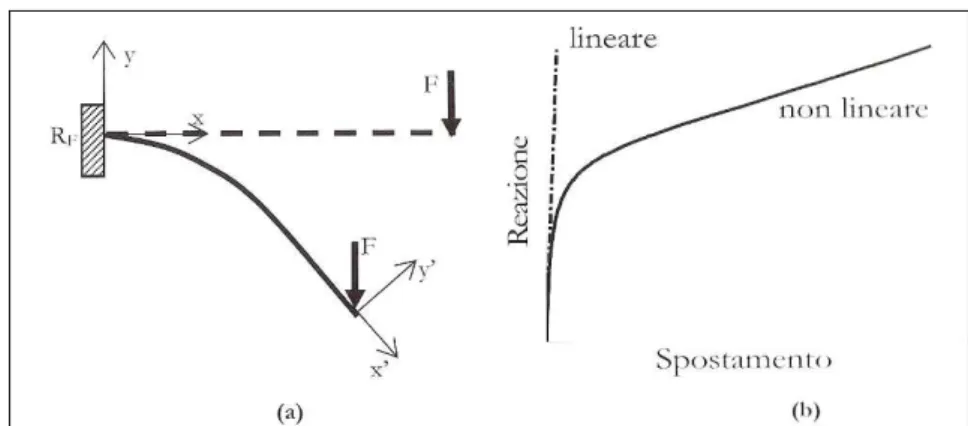
Le non linearità di tipo geometrico possono essere colte nel modello solo se si utilizza, per ogni elemento, un sistema di riferimento locale che sia effettivamente solidale all’elemento stesso e che quindi ruoti con esso (vedi fig. 4.1.)
Figura 4. 1: esempio di grandi spostamenti/rotazioni: (a) rotazione degli assi locali;
126
In questo modo è possibile tenere conto dell’influenza della configurazione deformata nel calcolo delle sollecitazioni. Ovviamente questo prevede un onere computazionale più elevato in quanto la matrice di rigidezza della struttura va aggiornata ad ogni passo di integrazione. Questo onere è quindi giustificato solo in presenza di strutture sufficientemente flessibili, per le quali le deformazioni giocano un ruolo importante, o per configurazioni di carico che possono dar luogo a effetti del secondo ordine non più trascurabili.
Per quanto riguarda le non linearità del materiale, i moderni codici di calcolo permettono due tipi di approcci per le strutture a telaio: una modellazione tramite cerniere plastiche (“a plasticità concentrata”) ed una tramite fibre (“a plasticità
diffusa”).
• Modellazione a plasticità concentrata: gli elementi della struttura (travi e
pilastri) sono rappresentati con modelli a comportamento lineare, concentrando in alcune zone (di solito all’estremità di travi e pilastri) elementi puntiformi a comportamento non lineare (cerniere plastiche).
Il vantaggio di questa modellazione è che permette di lavorare principalmente con elementi a comportamento elastico computazionalmente meno onerosi, lasciando a pochi punti della struttura la concentrazione della non-linearità del materiale. Inoltre è estremamente versatile in quanto permette, con un’opportuna scelta del legame costitutivo della cerniera, di descrivere diversi fenomeni, oltre al comportamento flessionale, che possono influenzare la risposta strutturale, quali la deformabilità a taglio, lo scorrimento dell’armatura, la flessibilità del nodo trave-colonna, l’interazione tra telaio e tamponamenti. Questo aspetto è particolarmente importante quando si vuole modellare il comportamento di strutture esistenti.
Il limite di questa modellazione è che richiede una certa esperienza dell’operatore per stabilire dove distribuire gli elementi non lineari e per scegliere i parametri e i modelli che permettono di cogliere il reale comportamento delle cerniere plastiche. Infatti, l’accuratezza dell’intera analisi può essere compromessa qualora si sbagli la calibrazione delle curve di risposta degli elementi cerniera o la loro estensione. Per poter utilizzare correttamente i codici con elementi a plasticità concentrata nello studio di strutture con
127
comportamento non lineare sotto carichi ciclici, è opportuno per i diversi elementi strutturali:
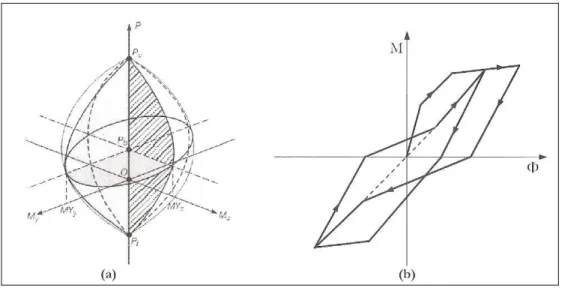
- Stimare in maniera adeguata nella sezione critica il diagramma
momento-curvatura in presenza di azione assiale e degrado ciclico, causato dall’azione ciclica del sisma, per scegliere opportunamente fra i vari modelli di interazione M-N (fig. 4.2 (a)) e di isteresi (fig. 4.3 (b)) proposti in letteratura e implementati nei codici;
- Stimare una lunghezza di cerniera plastica equivalente tale per cui il
prodotto di questa per la curvatura, derivante dal modello scelto, definisca una rotazione prossima a quella reale.
Figura 4. 2: esempio di: (a) modello di interazione momento-carico assiale;
(b) legame isteretico degradante momento-curvatura. [4.1]
• Modellazione a plasticità diffusa: in questo caso si considerano elementi trave
con comportamento anelastico: l’anelasticità è diffusa in tutto l’elemento strutturale, sia longitudinalmente che trasversalmente, attraverso l’utilizzo di elementi a fibre. Lo stato di sforzo e deformazione di una sezione del generico elemento è ottenuto tramite l’integrazione della risposta uniassiale non lineare sforzo-deformazione di ciascuna delle fibre in cui è suddivisa la sezione.
128
Figura 4. 3: discretizzazione in fibre di una sezione tipo di una trave in cemento armato [4.1]
Se viene utilizzato un numero sufficiente di fibre in un’analisi tridimensionale, la distribuzione delle non-linearità del materiale nella sezione può essere modellata accuratamente anche in presenza di condizioni di elevata anelasticità.
La sezione è rappresentata come somma delle fibre del calcestruzzo esterno alle staffe, di quelle del calcestruzzo interno e delle fibre delle armature longitudinali per tenere in considerazione un eventuale effetto di confinamento. Lo stato di sforzo e deformazione longitudinale dell’elemento viene calcolato tramite integrazione numerica di un numero appropriato di punti.
Se, da un punto di vista computazionale, un modello ad plasticità distribuita, utilizzando legami costitutivi non lineari per l’intero elemento trave, risulta più oneroso rispetto ad un modello ad anelasticità concentrata in pochi elementi, d’altra parte, da un punto di vista operativo, non necessita di una particolare esperienza di modellazione dell’operatore: tutto ciò che è richiesto all’utilizzatore è di definire le caratteristiche geometriche e conoscere il comportamento anelastico ciclico dei materiali per poter scegliere il modello costitutivo più appropriato fra quelli proposti in letteratura ed implementare nei codici. D’altro canto la gestione di un modello definito mediante elementi a fibra risulta molto più complesso di un modello definito mediante cerniere plastiche.
129 4.3.1 Analisi statiche non lineari
Nell’analisi statica non lineare (pushover) si applicano incrementalmente al modello della struttura soggetto ai carichi gravitazionali e con comportamento non lineare dei materiali, particolari distribuzioni di forze statiche orizzontali, le quali hanno il compito di “spingere” in campo non lineare la struttura fino a portarla al collasso.
In particolare, nella formulazione più semplice del metodo, durante le analisi le forze orizzontali vengono tutte scalate, mantenendo invariati i rapporti relativi fra le stesse, in modo da far crescere monotonamente lo spostamento orizzontale di un punto di controllo sulla struttura (in genere il baricentro dell’ultimo impalcato). Devono essere in generale considerate due differenti distribuzioni per ciascuna direzione principale dell’edificio: la prima proporzionale alle masse e la seconda proporzionale al prodotto fra le masse e gli spostamenti del primo modo di vibrare. Tale scelta nasce dalla considerazione che la distribuzione delle forze laterali dovrebbe approssimare la distribuzione delle forze di inerzia durante il sisma. Confronti con analisi dinamiche non lineari hanno evidenziato che le distribuzioni di forza proporzionali al primo modo colgono meglio la risposta dinamica sino a che la struttura rimane in campo elastico, mentre quando si raggiungono grandi deformazioni la risposta dinamica può risultare meglio rappresentata da distribuzioni di forze proporzionali alle masse. Queste distribuzioni devono essere applicate nelle due direzioni principali dell’edificio, ma in analisi separate.
Risultato finale dell’analisi è la curva taglio alla base (somma di tutte le forze orizzontali) – spostamento (di un punto ritenuto significativo del comportamento globale), che rappresenta la capacità della struttura (detta appunto curva di capacità) e che, quindi, verrà confrontata con la domanda, rappresentata da punti sulla curva stessa individuati in corrispondenza di valori di spostamento relativi alle massime domande di spostamento che la struttura subirebbe quando fosse soggetta ai diversi terremoti di progetto.
La domanda, in termini di sollecitazioni e deformazioni, si ottiene in corrispondenza dei valori di spostamento individuati sulla curva di capacità della struttura relativi alla massima risposta attesa per le azioni sismiche corrispondenti ai diversi stati limite. Per calcolare questi punti, si deve ridurre la struttura ad un modello equivalente ad un solo
130
grado di libertà (SDOF). Infatti, il passaggio dal modello iniziale a più gradi di libertà (MDOF) ad un modello equivalente ad un grado di libertà permette di utilizzare le informazioni derivanti dagli spettri elastici di risposta, e quindi di calcolare le sollecitazioni a cui la struttura deve essere in grado di resistere per i diversi stati limite. Il passaggio al sistema equivalente SDOF è ottenuto dividendo ascisse e ordinate delle curve di capacità del sistema MDOF per il fattore di partecipazione al primo modo, espresso dalla relazione:
Γ Σmi⋅Φi Σmi⋅Φi2
dove
Φ
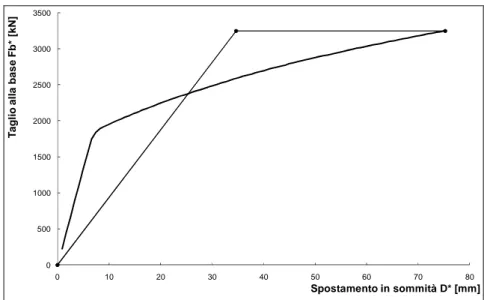
i è l’i-esimo elemento del primo autovettore e mi è la massa dell’i-esimo piano.La curva cosi ottenuta viene approssimata con una bilineare utilizzando il criterio di equivalenza delle aree, che prevede l’uguaglianza tra l’area sottesa dalla curva e l’area sottesa dalla bilineare. Cosi facendo la capacità di dissipazione energetica in campo non lineare del modello SDOF viene conservata in quello bilineare equivalente (fig. 4.4).
0 500 1000 1500 2000 2500 3000 3500 0 10 20 30 40 50 60 70 80 T a g li o a ll a b a s e F b * [k N ] Spostamento in sommità D* [mm]
Figura 4. 4: curva di capacità del sistema SDOF e comportamento bilineare equivalente ottenuto
dall’uguaglianza delle aree.
Dalla curva bilineare è possibile ricavare il valore della rigidezza del sistema ad 1-gdl
relativo al tratto elastico, e quindi il periodo proprio T* del sistema bilineare
131
Trattandosi ora di un modello ad un grado di libertà, è lecito usare gli spettri in accelerazione e spostamento (opportunamente scalati per tenere in conto il comportamento elasto-plastico del sistema equivalente) per individuare la domanda associata ad una data azione sismica (e quindi ad un determinato stato limite) e confrontarla con la capacità.
4.3.2 Analisi dinamiche non lineari
L’analisi dinamica non lineare permette di valutare la risposta di un edificio ad una forzante esterna, variabile nel tempo, costituita da un’accelerogramma, applicato ai nodi di struttura vincolati al terreno ( in maniera uniforme o differenziata per i vari nodi), per mezzo dell’integrazione diretta dell’equazione non lineare del moto del sistema.
Essa, permettendo di conoscere l’andamento degli stati di sforzo e di deformazione dei componenti della struttura nel tempo, è il tipo di analisi più completo a disposizione ma, anche, quello più complesso da applicare.
L’azione sismica è rappresentata da gruppi di tre accelerogrammi agenti simultaneamente sul modello tridimensionale della struttura, due nelle direzioni principali orizzontali e uno in direzione verticale. Nel caso di edificio regolare e le cui dimensioni rispettino determinate limitazioni, è possibile applicare un accelerogramma orizzontale alla volta e trascurare quello verticale.
L’analisi dinamica non lineare è sicuramente il tipo di analisi più completo a disposizione, ma anche quello più complesso e la sua applicazione richiede particolare attenzione. Tra gli aspetti più delicati possiamo citare l’individuazione di un modello che sia in grado di descrivere il comportamento post-elastico sotto cicli di carico e scarico degli elementi e la conseguente dissipazione di energia e la scelta degli accelerogrammi da utilizzare come input: essi devono infatti essere rappresentativi degli eventi attesi nella zona in cui è situato l’edificio in esame.
A tal fine è necessario, innanzitutto, determinare lo spettro di risposta elastico, che costituisce il modello di riferimento per la descrizione del moto sismico del suolo. Noto lo spettro elastico in accelerazione, il secondo passo consiste nell’ottenere accelerogrammi spettro-compatibili tramite un’accurata scelta e selezione di
132
accelerogrammi registrati che possono anche essere adattati tramite appositi algoritmi con l’obiettivo di diminuire la loro variabilità rispetto allo spettro stabilito dalla norma. Una volta definiti il modello non lineare, le masse, i carichi, statici e gli accelerogrammi da applicare, sono noti tutti i termini che compongono le equazioni differenziali del moto e l’analisi può essere svolta. Nel caso generale tridimensionale si adotta il seguente procedimento:
- Da ogni analisi condotta con ognuno dei gruppi di accelerogrammi scelti,
si ricavano i dati di output relativi all’andamento temporale di ogni quantità di interesse (sollecitazioni di taglio e spostamenti/rotazioni).
- Per ogni andamento temporale delle sollecitazioni, corrispondente ad
ogni analisi svolta, si sceglie quindi il massimo in valore assoluto.
- Per ogni istante in cui è campionato ogni andamento temporale degli
spostamenti/rotazioni, corrispondente ad ogni analisi svolta, si calcola il corrispondente valore di rotazione di corda.
- Una volta noto l’andamento temporale della rotazione di corda si deve
scegliere il valore massimo (in modulo), per ognuna delle analisi svolte. Il passo successivo consiste nel calcolo dei valori di domanda, da confrontare con quelli di capacità e con cui quindi svolgere le adeguate verifiche.
4.4 OpenSees: scelte di modellazione del caso studio
La struttura oggetto di studio della presente tesi è stata modellata tramite il programma ad elementi finiti a plasticità diffusa OpenSees (Open System for Earthquake Engineering Simulation).
OpenSees è un programma open-source agli elementi finiti finanziato dal PEER (Pacific Earthquake Engineering Research Center) impiegato nell’ambito dell’ingegneria sismica per la simulazione di strutture. Utilizza il linguaggio C++ ed ha una struttura modulare che consente agli utilizzatori e sviluppatori appartenenti a diversi settori (strutturale, geotecnico) di inserire e modificare singolarmente specifici moduli. In tal modo qualsiasi modifica riguarda solo il modulo in esame e non la struttura del
133
programma, che è si trova cosi ad essere in continua evoluzione e continuamente testato dagli utenti di tutto il mondo.
Una caratteristica chiave di OpenSees è quindi proprio l’intercambiabilità dei componenti e la possibilità di integrare librerie esistenti e nuove componenti nel framework senza la necessità di cambiare il codice esistente.
OpenSees è un software framework object oriented (programma che opera a livello framework orientato agli oggetti) composto da un set di moduli necessari alla creazione del modello agli elementi finiti, alla definizione della procedura di analisi, delle grandezze da monitorare durante l’analisi e ad analisi conclusa.
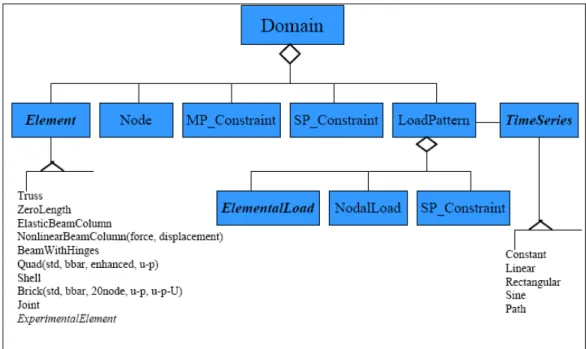
Più in particolare i quattro tipi di oggetti che compongono la struttura sono (fig. 4.5) :
Figura 4. 5: principali oggetti e gerarchia utilizzata in OpenSees [4.2]
• ModelBuilder: genera gli oggetti nel modello e li aggiunge al dominio
(Domain);
• Domain: registra lo stato del modello al tempo ti e al tempo (ti + dt) ed è responsabile del salvataggio degli oggetti creati dall’oggetto ModelBuilder (fig. 4.6) e assicura agli oggetti Analysis e Recorder l’accesso a questi oggetti;
134
Figura 4.6: struttura del Domain Object e classi di oggetti che è possibile creare nel Model Builder
Object [4.2]
Le classi di oggetti che è possibile creare nel ModelBuilder e registrare nel Domain sono quelle illustrate in figura 4.6 e più in particolare:
- Element: è la classe dei vari tipi di oggetto “elementi” che è possibile
creare (elmento trave con legame lineare, non lineari, bielle, shell, etc.) - Node: crea, attraverso delle coordinate spaziali, gli oggetti “nodi
della struttura” necessari alla definizione degli oggetti elementi che li collegano;
- MP_Constraint: crea l’oggetto Multi Point Constraint per la gestione
dei vincoli geometrici tra più nodi del modello;
- SP_Constraint: crea l’oggetto Single Point Constraint per la gestione
dei vincoli da attribuire ai singoli punti;
- Load Pattern: crea, in associazione con l’oggetto TimeSeries (che
crea sequenze temporali da associare alle storie di carico) e gli oggetti
Load e Constraint, gli oggetti “schemi di carico” all’interno dei quali
è possibile definire i vari carichi agenti sulla struttura (carichi nodali, carichi linearmente distribuiti, spostamenti imposti);
135
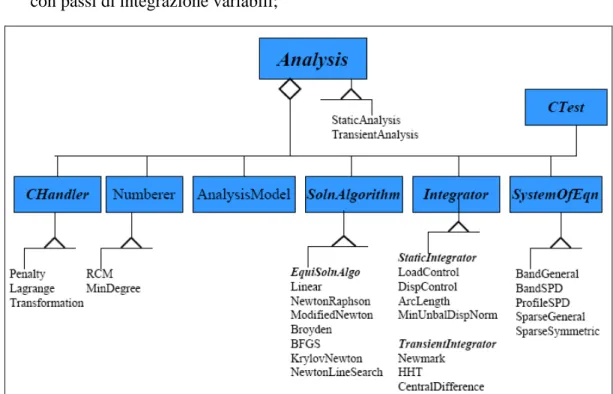
• Analysis: sposta il modello dal suo stato al tempo ti allo stato al tempo (ti + dt) e può essere di tipo statico, dinamico con passi di integrazione costanti o dinamico con passi di integrazione variabili;
Figura 4.7: struttura dell’ Analysis Object e classi di oggetti che è possibile creare nel Model Builder
Object
Le classi di oggetti (fig. 4.7) attraverso le quali è possibile farlo sono:
- CHandler: crea l’oggetto ConstraintHandler che definisce come
vengono introdotte le equazioni rappresentative dei vincoli all’interno dell’analisi. Questo tipo di equazione impone un determinato valore ad un grado di libertà di un nodo, oppure una relazione tra i vari gradi di libertà dei nodi;
- Numberer: crea l’oggetto DOF_Numberer per la numerazione dei
gradi di libertà e la corrispondenza tra questi e le equazioni.
- SolutionAlgotithm: è usato per creare l’oggetto SolutionAlgotithm che
determina la strategia di soluzione delle equazioni non lineari.
- Integrator: crea l’oggetto Integrator che definisce le modalità di
136
- System of Equation: crea gli oggetti LinearSOE e LinearSolver che
rispettivamente ordinano e risolvono il sistema di equazioni nell’analisi.
- CTest: crea l’oggetto ConvergenceTest di cui necessitano alcuni
algoritmi di risoluzione delle equazioni per determinare se la convergenza della soluzione è stata raggiunta o meno alla fine del passo di iterazione.
• Recorder: registra nel modello i parametri definiti dall’utente durante l’analisi
per creare visualizzazioni grafiche o per registrare i risultati ad analisi conclusa; e tutto questo avviene attraverso i comandi e l’interprete Tcl (Tool command language).
4.4.1 Scelte di modellazioni
La struttura oggetto di studio di questa tesi è stata modellata, definendo in ognuna di queste classi i relativi oggetti, mediante un modello spaziale costituito da circa 500 nodi, collegati da 700 elementi trave a comportamento non-lineare, ognuno dei quali schematizzato attraverso una sezione a fibre.
Di seguito vengono descritte le più importanti scelte di modellazione ed il modo in cui sono state implementate in OpenSees.
4.4.2 Materiali
Acciaio
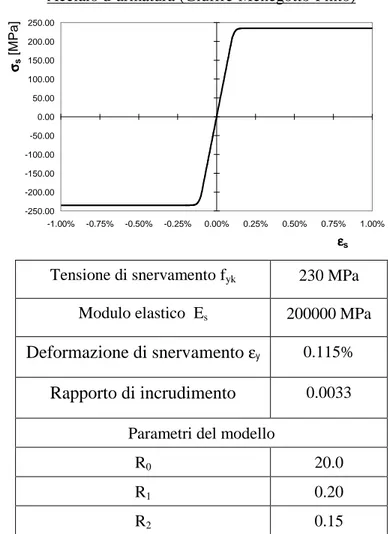
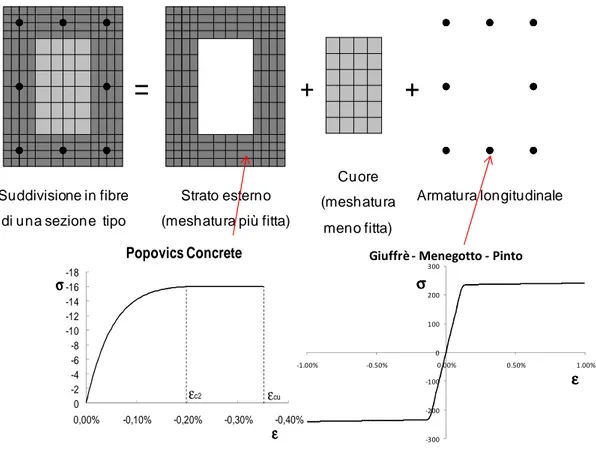
Il comportamento delle barre di armatura è stato schematizzato attraverso il modello di Giuffrè-Menegotto-Pinto (Steel02 Material [4.2]) caratterizzato da un comportamento pressoché bilineare con una zona di transizione tra il ramo elastico e quello plastico. La scelta di questo tipo di legame è stata dettata dalla necessità di evitare i problemi di stabilità numerica che sono stati riscontrati nel caso di utilizzo di legame tensione-deformazione di tipo bilineare (Hardening Material [4.2]) in corrispondenza della brusca variazione di rigidezza. I parametri che controllano la transizione dal ramo
137
elastico a quello plastico incrudente, sono stati comunque scelti in modo da avvicinarsi il più possibile ad un comportamento elasto-plastico. In accordo con le caratteristiche del materiale definito in fase di progetto della struttura stessa, la tensione in corrispondenza dello snervamento è stata fissata pari a 230 MPa e il modulo elastico a 200000 MPa. Il rapporto di incrudimento è stato invece fissato pari al minimo necessario a non incontrare, anche in questo caso, problemi di stabilità numerica della soluzione, e cioè pari a 0.33%
Figura 4.8: definizione del materiale steelMat tramite l’editor TclEditor Acciaio d’armatura (Giuffré-Menegotto-Pinto)
-250.00 -200.00 -150.00 -100.00 -50.00 0.00 50.00 100.00 150.00 200.00 250.00 -1.00% -0.75% -0.50% -0.25% 0.00% 0.25% 0.50% 0.75% 1.00% εεεεs σσσσs [ M P a ]
Tensione di snervamento fyk 230 MPa
Modulo elastico Es 200000 MPa
Deformazione di snervamento εy 0.115%
Rapporto di incrudimento 0.0033
Parametri del modello
R0 20.0
R1 0.20
R2 0.15
138
Calcestruzzo
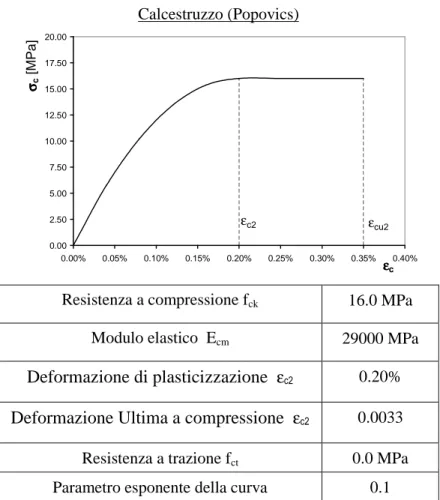
Il comportamento del calcestruzzo è stato modellato attraverso la trattazione proposta da Popovics (Concrete04 Material – Popocivs Concrete Material [4.2]), con degrado lineare della rigidezza di scarico/ricarico.
Il valore nominale della resistenza a compressione è stato assunto pari a quello
caratteristico del calcestruzzo avente Rck=20MPa ed il modulo tangente nell’origine pari
a Ec=29000MPa, mentre non è stata considerata la resistenza a trazione (resistenza
nulla).
A causa dell’elevato passo delle staffe, il calcestruzzo è stato modellato interamente come non confinato.
139 Calcestruzzo (Popovics) 0.00 2.50 5.00 7.50 10.00 12.50 15.00 17.50 20.00 0.00% 0.05% 0.10% 0.15% 0.20% 0.25% 0.30% 0.35% 0.40% εεεεc σσσσc [ M P a ] εc2 εcu2
Resistenza a compressione fck 16.0 MPa
Modulo elastico Ecm 29000 MPa
Deformazione di plasticizzazione εc2 0.20%
Deformazione Ultima a compressione εc2 0.0033
Resistenza a trazione fct 0.0 MPa
Parametro esponente della curva 0.1
Figura 4.11: curva tensione – deformazione del materiale utilizzato
e i relativi parametri rappresentativi della curva
4.4.2 Sezioni
Le sezioni resistenti di tutti gli elementi (travi e colonne) sono state modellate attraverso una schematizzazione in fibre longitudinali in modo che l’anelasticità sia diffusa in tutto il corpo, sia longitudinalmente che trasversalmente. Ogni fibra ha un comportamento uniassiale definito dal materiale associato alla fibra stessa e viene fatta l’ipotesi di mantenimento delle sezioni piane.
La modellazione in fibre permette di tenere in conto, in maniera implicita, dell’interazione tra sforzo normale e momento flettente, mentre il comportamento della sezione (e quindi dell’elemento) sotto sforzi taglianti o torcenti è stato considerato di tipo lineare e disaccoppiato dal comportamento presso-tenso/flessionale.
140
La suddivisione in fibre della sezione di calcestruzzo è stata differenziata tra la parte più esterna, dove la meshatura è più fitta per riuscire a cogliere meglio comportamenti nonlineari più marcati ed eventuali rotture delle fibre, e il cuore, dove la meshatura è meno fitta per non appesantire eccessivamente il modello (fig. 4.12).
Suddivisione in fibre di una sezione tipo
Strato esterno (meshatura più fitta)
Cuore (meshatura meno fitta) Armatura longitudinale -18 -16 -14 -12 -10 -8 -6 -4 -2 0 -0,40% -0,30% -0,20% -0,10% 0,00% σσσσ εεεε Popovics Concrete εc2 εcu -300 -200 -100 0 100 200 300 -1.00% -0.50% 0.00% 0.50% 1.00% σσσσ εεεε Giuffrè - Menegotto - Pinto
Figura 4.12: esempio di discretizzazione in fibre di una sezione rettangolare in c.a.
È stata quindi definita una routine di generazione automatica delle sezioni rettangolari in cui bisogna definire, oltre al tag di riferimento, altezza e larghezza della sezione, copriferro (in direzione y e z degli assi locali, la direzione y coincide con l’asse di flessione), il numero e il diametro delle barre di armatura nella zona superiore della sezione, quelli della zona inferiore e quelli di parete. Vanno inoltre indicati i materiali da associare alle varie fibre (fig. 4.13).
141
Figura 4.13: esempio di generazione della sezione dei pilastri del piano terra tramite l’utilizzo della
routine di generazione automatica di sezioni a fibre precedentemente definita nel file di TclEditor
4.4.3 Elementi trave
I nodi del modello sono stati definiti in corrispondenza di ogni nodo trave-colonna della struttura e nei punti di variazione delle sezioni (variazione dell’armatura) delle travi. In questo modo, le travi appartenenti ai telai paralleli al telaio 1 e le travi appartenenti al telaio 3, sono state suddivise in 5 conci per schematizzare la variazione dell’armatura lungo la trave stessa (fig. 4.14). Le travi appartenenti ai telai 4 e 5 e le colonne sono invece state modellate con un unico elemento in quanto la sezione e le armature si mantengono costanti.
Figura 4.14: esempio di modellazione dei nodi di una trave di un telaio con armatura variabile lungo
142
520
4
7
0
2340
1
8
4
0
520
520
520
4
5
0
4
5
0
260
4
7
0
A B C D E 1 2 3 4 5 6 X Y143 2340 1 2 4 5
144
1840
1
0
6
5
145
Figura 4.17 corrispondenza tra nodi della struttura e nodi del modello dei telai paralleli all’asse y.
Il tipo di oggetto utlizzato per definire travi e colonne è stato il nonlinearBeamColumn
Element (fig. 4.18), al quale, una volta definiti il nodo start ed il nodo end, è possibile
associare una sezione a fibre precedentemente definita, il numero di punti di integrazione e l’oggetto Geometric Transformation necessario per trasformare rigidezza e sollecitazioni degli elementi dal sistema di assi locali a quello globale di riferimento.
Figura 4.18 esempio di discretizzazione in fibre di un elemento strutturale in c.a. utilizzando due punti di
integrazione (oltre ai nodi ) lungo l’elemento.
Il numero dei punti di integrazione per ogni elemento è stato assunto pari a 5, numero sufficientemente alto per assicurare la stabilità numerica ma non tale da appesantire troppo l’analisi.
La trasformazione geometrica degli assi locali in globali è stata assunta di tipo lineare, configurazione iniziale e finale vengono quindi fatte coincidere. Si sono ritenuti infatti trascurabili gli effetti dovuti alle non linearità geometriche degli elementi trave e colonna (nella definizione delle aste dei controventi è stata utilizzata una trasformazione di tipo corotazionale, cioè una trasformazione esatta tra sistema locale e globale).
146
Figura 4.19 schematizzazione del funzionamento di un oggetto GeomTransformation
4.4.4 Vincoli
Le fondazioni sono state modellate come incastri perfetti in direzione Y e cerniere in direzione X
4.4.5 Modello solaio
E’ importante notare che la rigidezza del solaio equivalente gioca un ruolo fondamentale nella modellazione della struttura mediante fibre longitudinali.
Infatti, anche se nominalmente le travi sono semplicemente inflesse, a causa della non linearità del materiale e dell’asimmetria della sezione, l’asse neutro tende a non coincidere con l’asse baricentrico per soddisfare l’equilibrio delle forze interne. Se le sezioni di estremità della trave sono vincolate in modo da non poter avere movimenti relativi, l’asse neutro deve coincidere con quello baricentrico e l’equilibrio delle forze interne può essere soddisfatto solo se il vincolo reagisce generando uno sforzo normale nella sezione. La trave risulta cosi compressa anche se soggetta solo a carichi ortogonali all’asse della trave stessa (fig. 4.20).
147
NO vincoli in direzione assiale Vincoli in direzione assiale
N=0: Risultanti compressioni
Risultante trazioni=
Altezza asse neutro
Asse neutro coincidente con l’asse baricentrico N=0 Risultanti compressioni Risultante trazioni= Modellazione a fibre
Figura 4.20 differenti comportamenti della trave a seconda della presenza di vincoli in direzione assiale
Questo riduce la capacità di rotazione delle sezioni, rendendo il meccanismo di rottura più fragile rispetto al caso di assenza di solaio (vedi fig 4.21).
0 100 200 300 400 500 600 700 800 900 1000 1100 1200 0 20 40 60 80 100 T a g li o a ll a b a s e [ k N ] Spostamento in sommità [mm]
Sistema reticolare equivalente Diaframma rigido
No solaio
Figura 4.21 differenti comportamenti della struttura al variare della rigidezza del solaio
Nella modellazione della struttura è stata adottata una soluzione intermedia tra l’assenza del solaio e l’ipotesi di piano rigido (fig. 4.21) e cioè attraverso un sistema reticolare equivalente. La rigidezza del sistema equivalente è stata valutata attraverso le seguenti relazioni (fig. 4.22) [4.1]: Ktruss 1 L3 12 Econc⋅ ⋅Jslab L Gconc Aslab⋅ +
148
Ktruss Esteel Atruss ⋅ Ltruss A slab, Jslab L L truss
149 Bibliografia
[4.1] Petrini L., Pinho R., Calvi G.M., Criteri di progettazione antisismica degli Edifici, IUSS Press, 2006
[4.2] Mazzoni S., McKenna F., Scott M.H., Fenves G.L. et al., OpenSees Command Language
![Figura 4. 3: discretizzazione in fibre di una sezione tipo di una trave in cemento armato [4.1]](https://thumb-eu.123doks.com/thumbv2/123dokorg/7350911.93124/8.892.185.757.128.315/figura-discretizzazione-fibre-sezione-tipo-trave-cemento-armato.webp)
![Figura 4. 5: principali oggetti e gerarchia utilizzata in OpenSees [4.2]](https://thumb-eu.123doks.com/thumbv2/123dokorg/7350911.93124/13.892.220.714.455.689/figura-principali-oggetti-gerarchia-utilizzata-opensees.webp)