Capitolo 7
Controllo combinato
7.1
Introduzione
Una possibile soluzione per il controllo del sincronismo tra le due macchine ´e il controllo indipendente. Tale soluzione anche se riduce la complessit´a dell’impianto e dell’architettura di controllo, non garantisce buone presta-zioni in tutti gli scenari.
Il controllo combinato si pone l’obiettivo di governare attivamente la diffe-renza di posizione tra i due motori, intervenendo sul riferimento di posizione.
7.2
Architettura di controllo
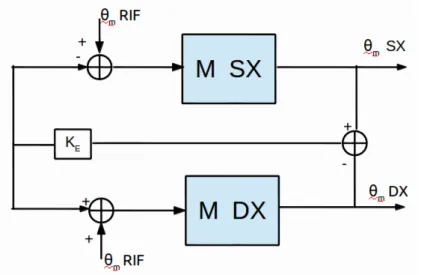
In figura 7.1 si riporta l’architettura utilizzata, la soluzione adoperata invia al regolatore di posizione un segnale proporzionale alla differenza di posizione dei due rotori. L’effetto complessivo ´e quello di rallentare il motore pi´u veloce e accelerare quello pi´u lento.
7.3
Simulazioni
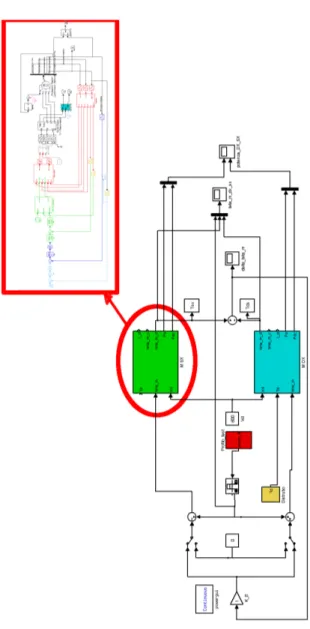
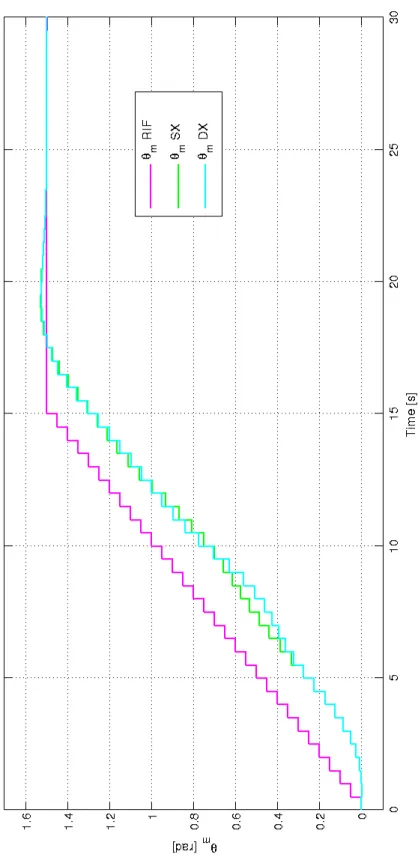
Per verificare l’effettivo vantaggio nell’impiego di un controllo combinato si procede con dei test in ambiente Simulink. In figura 7.2 si riporta lo sche-ma utilizzato nelle simulazioni. Per il profilo di posizione che l’azionamento deve inseguire si ´e scelto una scenario di push & hold. Si richiede un mo-vimento dove la posizione incrementa linearmente fino a 15s dopodich´e si deve mantenere la posizione. Quanto detto si rappresenta in figura 7.3. Si ipotizza un disturbo a rampa di 2000 N ms di durata 3s (figura 7.4), applicato al motore di destra. I test vengono effettuati con l’obiettivo del confronto fra le prestazioni dell’azionamento a controllo indipendente e combinato. Si usa l’indicatore Δθm come nell’analisi sviluppata nel capitolo dedicato alla
CAPITOLO 7. CONTROLLO COMBINATO
Figura 7.1: Architettura di controllo del complesso
semplificare ed ottenere una correlazione stretta tra allungamento e diffe-renza di posizione angolare, ottenendo la 7.1. Ad esempio, un Δθm di 0.05
radianti provoca un allungamento/compressione del 2.5%. Δl
l ≈ Δθm
2 (7.1)
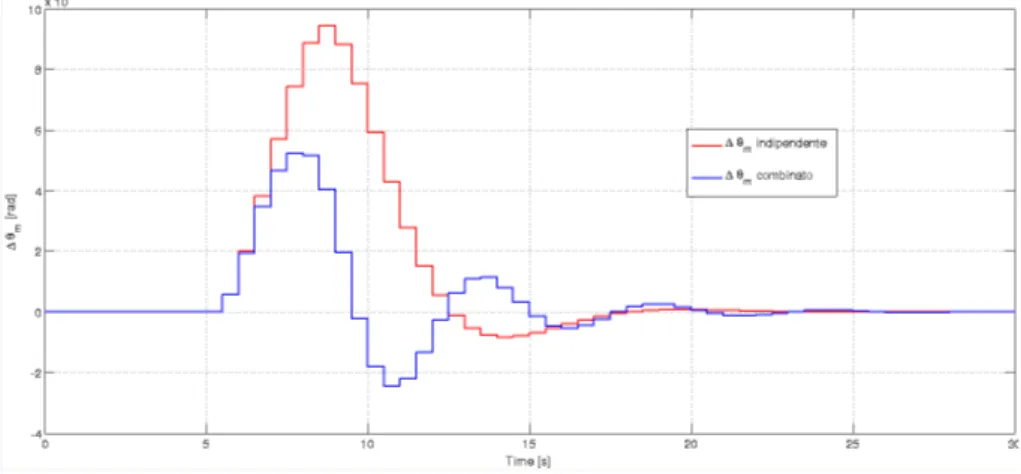
L’analisi dei risultati pu´o essere sintetizzata nella figura 7.5 la quale mo-stra la differenza tra la posizione del motore di sinimo-stra e quello di demo-stra. Prima dell’intervento del disturbo i due motori sono sincroni ed inseguo-no il riferimento con un ridotto errore. Si precisa che l’obiettivo principale ´e quello di garantire il sincronismo delle due macchine, l’errore rispetto al riferimento deve essere contenuto, ma non pregiudica in maniera rilevante la bont´a dell’azionamento. L’aumento della coppia resistente sul motore di destra provoca un rallentamento al quale seguir´a un Δθm. La connessione
risulta in trazione, l’entit´a dello stress deve rimanere nel consentito per evi-tare deformazioni permanenti. A seguito dell’analisi condotta sugli stress meccanici, si ritiene plausibile un Δθm massimo di 5· 10−3 radianti.
La taratura del KE viene eseguita per tentativi utilizzando come feedback
progettuale, il valore di picco e il tempo di assestamento di Δθm. La
regola-zione utilizzata vale KE=1, con la quale si garantisce, nello scenario
ipotiz-zato, delle sovratensioni sulle connessioni pari al 50% rispetto al controllo indipendente. Quanto rilevato convalida la scelta progettuale di adottare un controllo combinato.
rispetti-7.3. SIMULAZIONI
CAPITOLO 7. CONTROLLO COMBINATO
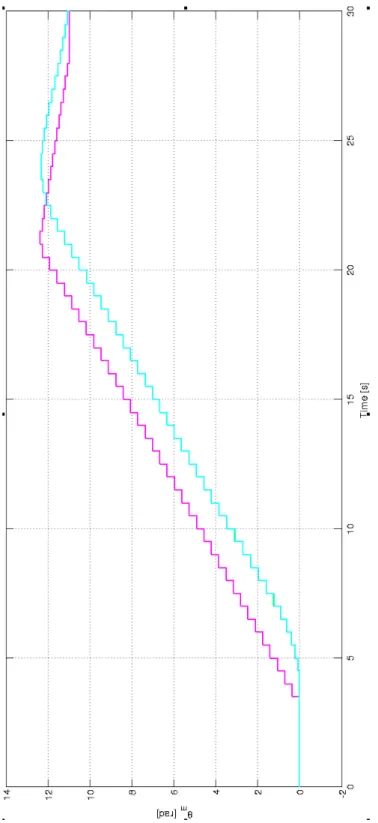
Figura 7.3: Profilo di posizione richiesto all’azionamento
7.3. SIMULAZIONI
Figura 7.5: Controllo combinato e indipendente: violazione dei limiti
CAPITOLO 7. CONTROLLO COMBINATO
cendo l’entit´a del distubo a 150 N ms si rientra nei limiti sul massimo allun-gamento dettati dal capitolo sulla meccanica. In quest’ultimo caso risulta ancora pi´u evidente il beneficio portato dal controllo di tipo combinato, poi-ch´e lo stesso disturbo applicato al sistema indipendente provoca la violazione dei limiti imposti. In figura 7.6 si riporta il confronto tra i due andamenti a dimostrazione di quanto descritto. Nelle successive 7.9 e 7.10 si riporta la risposta al segnale di riferimento. Dalla figura 7.10, si nota come il controllo di tipo combinato garantisce un ottimo sincronismo sostenendo la fattibilit´a del progetto.
7.3. SIMULAZIONI
7.3. SIMULAZIONI