Capitolo 1
Neurofisiologia del tatto
1.1 Il senso del tatto[1]
Il senso del tatto rende in grado l’organismo di rispondere a stimoli fisici quali la pressione, la variazione di temperatura e la deformazione. Il sistema tattile umano, a differenza degli altri sistemi sensoriali, non è localizzato in organi o apparati specifici ma è diffuso in varie parti del corpo: la cute, i muscoli, i tendini, lo scheletro, l’apparato viscerale; si tende quindi di solito a parlare di punti tattili esterni e viscerali. Questi sono distribuiti in modo non uniforme sulle varie parti del corpo e si identificano con i recettori tattili. Questi recettori raccolgono stimoli di diversa natura, i quali, convogliati attraverso le fibre nervose periferiche, raggiungono il midollo spinale. Tali fibre nervose si legano al midollo nei gangli dorsali e in quelli ventrali attraverso la radice ventrale e dorsale. Queste connessioni raccolgono le informazioni e le fanno proseguire, attraverso i cordoni spinali, verso l’encefalo, oppure le elaborano e stimolano i “circuiti” di arco riflesso per dare vita alle reazioni necessarie, come quelle in risposta a uno stimolo doloroso.
Nel senso del tatto bisogna fare una distinzione tra la propriocezione e l’esterocezione. La propriocezione rappresenta la capacità di percepire e riconoscere la posizione del proprio corpo nello spazio e lo stato di contrazione dei propri muscoli, anche senza il supporto della vista. Recettori propriocettivi sono i recettori del sistema cinestetico e dell’apparato vestibolare situato nel labirinto. Recettori del sistema cinestetico sono: i fusi neuromuscolari, situati nella muscolatura volontaria; gli organi di Golgi, situati nella giunzione muscolo tendinea; le terminazioni di Ruffini presenti a livello delle capsule articolari.
L’esterocezione rappresenta la capacità di percepire e acquisire informazioni sull’ambiente esterno. Recettori esterocettivi sono i recettori periferici che si trovano sulla pelle.
1.1.1 Il sistema tattile periferico
Il sistema tattile esterocettivo è caratterizzato essenzialmente dai recettori tattili inseriti all’interno del tessuto cutaneo e da una forte innervazione. Il tessuto cutaneo riveste un
ruolo importante per il tatto; infatti esso condiziona, con le proprie caratteristiche, le risposte dei recettori agli stimoli.
La cute è il più grande organo di senso nel corpo. In un adulto medio, questa copre circa 2 m2 e pesa 3-5 kg. Oltre che essere il rivestimento esterno del corpo umano la cute assolve altri compiti: la difesa dall’ambiente esterno, la termoregolazione, l’eliminazione di sostanze tossiche, la produzione di anticorpi e di sostanze vitaminosimili, il contatto con l’ambiente.
La cute (figura 1.1) consiste di due strati maggiori: l’epidermide, che è lo strato più esterno con funzione di protezione e termoregolazione; e il derma, lo strato più interno, è più spesso dell’epidermide e conferisce le caratteristiche meccaniche alla cute; contiene i recettori, i vasi sanguigni, i bulbi piliferi, il collagene e le fibre elastiche. Le unità recettrici, che si crede essere responsabili di tradurre i vari tipi di stimoli in risposte neurali, si trovano in entrambi gli strati, come anche all’interfaccia tra strati. Un terzo strato, contenente tessuto connettivo e grasso sottocutaneo, si trova sotto il derma e sopra la struttura di supporto, composta di muscoli e ossa. Anche se questo strato non fa parte della tradizionale definizione di cute, contiene una popolazione di organi recettori: i corpuscoli di Pacini.
Le fibre sensoriali, che entrano nella cute, all’interno del derma formano plessi associati con i vasi sanguigni più piccoli, oppure si diramano mantenendo una loro identità individuale. Ogni fibra afferente termina con l’elemento sensorio, il recettore.
I recettori non sono distribuiti in modo uniforme sulla superficie corporea e non sembrano avere apparentemente una organizzazione spaziale logica e strutturata. I recettori possono essere classificati per sensibilità al tipo di stimolo, a cui rispondono, o per morfologia. Se classificati per tipologia di stimolo i recettori possono essere divisi in: meccanocettori, che rispondono a stimoli meccanici; termocettori, sensibili ai cambiamenti di temperatura; nocicettori, sensibili a stimoli ambientali potenzialmente nocivi e quindi trasduttori della percezione del dolore.
Ogni recettore può essere morfologicamente complesso ed individuabile come entità corpuscolare a sé (terminazione corpuscolare), oppure può essere una semplice terminazione nervosa libera. Quindi i recettori si dicono incapsulati, se è presente un corpuscolo derivante da una cellula di Schwan; terminazioni libere, se il recettore è costituito dall’assone sprovvisto di copertura mielinica.
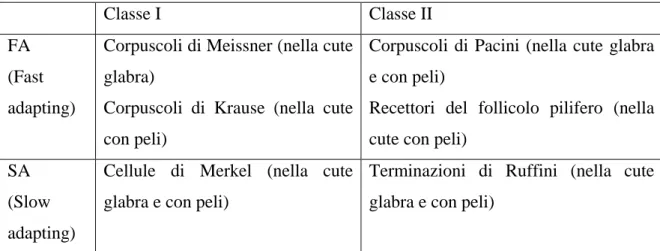
I meccanocettori sono situati sia negli strati esterni della cute che in quelli sottostanti, sono in grado di rispondere anche a stimoli di natura termica o chimica, tuttavia tale risposta viene eliminata a livello di fibre afferenti superiori. Hanno tre caratteristiche che li contraddistinguono: il tipo di stimolazione per la quale sono sensibili, grandezza del campo recettivo, e il tempo di adattamento allo stimolo. Possono essere classificati a seconda della rapidità con la quale reagiscono allo stimolo esterno in recettori: slow adapting (SA), fast adapting (FA); per ognuna di queste classi può essere fatta un’ulteriore distinzione dovuta alla capacità del meccanocettore di riconoscere oggetti piccoli con bordi netti (classe I), o oggetti larghi con bordi sfumati (classe II).
La rapidità di adattamento allo stimolo si ripercuote direttamente sul tipo di sollecitazione verso la quale il recettore è sensibile: i recettori di tipo FA reagiscono a stimoli ad alta frequenza quali vibrazioni, tocco e azione di corpi in movimento, e i recettori SA sono sensibili ad intensità e pressione e a sforzi di tipo tangenziale.
I recettori FA includono diverse specie di recettori, che si possono trovare sia sulla cute con peli che su quella glabra, e possono essere suddivisi in due sottoclassi: FAI, che oltre ad avere campo recettivo piccolo rispondono meglio alla velocità di deformazione della cute; e FAII, che hanno campo recettivo più grande e rispondono meglio alle accelerazioni.
Unità FA sono: i corpuscoli di Pacini, di Meissner, di Krause e i recettori del follicolo pilifero.
I corpuscoli di Pacini (figura 1.1) fanno parte della classe FAII e sono situati negli strati più profondi della cute sia della pelle glabra che con peli, hanno una struttura a forma di piccola perla grigia formata da tessuto non nervoso, lamellata e simile a una cipolla; la loro lunghezza varia tra 0.5 e 2 mm e contengono al centro un terminale nervoso allungato. La fibra afferente è melinata.
I corpuscoli di Meissner (figura 1.1) sono recettori FAI incapsulati situati nel derma della cute glabra ripiegati nelle papille dermiche che riempiono le scanalature nella pelle. Le terminazioni nervose sono formate da lamine avvolte ad elica lungo l’asse del corpuscolo separate da cellule di Schwan. Il corpuscolo di Meissner è un meccanocettore sensibile alla velocità e quindi scarica impulsi solo durante il movimento della pelle.
I corpuscoli di Krause sono recettori FAI, si trovano prevalentemente nella pelle con peli. Esistono in due varietà globulari o cilindriche, il loro assone termina nella capsula con disposizione lineare nella varietà cilindrica e a spirale nella varietà globulare.
I recettori del follicolo pilifero si trovano nella cute con peli, sono meccanocettori FAI, scaricano impulsi solo quando il pelo viene mosso, sono innervati da fibre afferenti melinate che terminano in un complesso di terminazioni organizzate circonferenzialmente intorno alla guaina della radice del pelo sotto le ghiandole sebacee.
I recettori di tipo SA, come i rilevatori di velocità, rispondono durante lo spostamento della pelle, ma in aggiunta sostengono una scarica di impulsi quando la pelle è mantenuta in una nuova posizione; rispetto ai recettori FA possono fornire informazioni circa i cambiamenti a lungo termine nelle condizioni meccaniche della pelle. Come i meccanocettori FA, i recettori SA possono essere suddivisi in sottoclassi: gli SAI silenti in assenza di stimolo meccanico applicato, producono impulsi con andamento irregolare con l’applicazione di stimoli prolungati, gli SAII producono impulsi con andamento regolare quando siamo in assenza di deformazione.
Meccanocettori SA sono le cellule Merkel, e le terminazioni di Ruffini.
Le cellule di Merkel (figura 1.1) e le terminazioni nervose associate formano un recettore SAI. Le cellule Merkel sono alla base dell’epidermide, hanno nuclei con molti lobi, contengono vescicole granulari dalla parte del derma e piccole proiezioni come bastoni sulla superficie epidermica. Alla base di ogni cellula Merkel l’assone melinato forma un’espansione a forma di disco, chiamato disco di Merkel.
Le terminazioni di Ruffini (figura 1.1) sono unità SAII. Queste forniscono una continua indicazione della pressione e tensione permanente nella pelle. I recettori sono incapsulati e si trovano nel derma della pelle sia con peli che glabra.
Nella tabella 1.1 sono presentate schematizzate le varie caratteristiche dei meccanocettori.
Classe I Classe II
FA (Fast adapting)
Corpuscoli di Meissner (nella cute glabra)
Corpuscoli di Krause (nella cute con peli)
Corpuscoli di Pacini (nella cute glabra e con peli)
Recettori del follicolo pilifero (nella cute con peli)
SA (Slow adapting)
Cellule di Merkel (nella cute glabra e con peli)
Terminazioni di Ruffini (nella cute glabra e con peli)
Tabella 1.1: schema delle caratteristiche dei vari meccanocettori; tra parentesi sono specificati i siti dove si trovano i recettori.
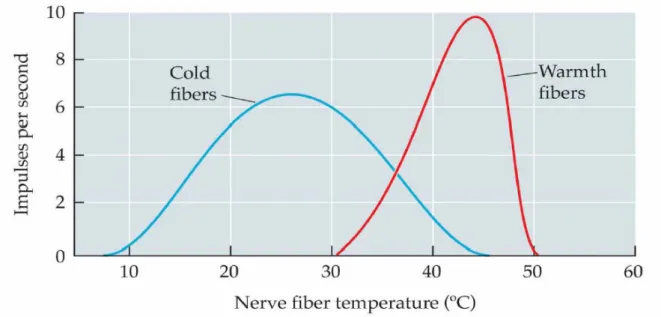
La risposta agli stimoli termici è mediata da alcune popolazioni di recettori cutanei periferici che si trovano vicino alla superficie del corpo. I ricercatori hanno documentato l’esistenza di due separate classi di termocettori: i recettori caldi, con risposta massima nel range di 25-30 °C, e recettori freddi, con risposta massimamente a 40-42 °C (figura 1.2). I termocettori generano una scarica continua di impulsi se la pelle è mantenuta a temperatura costante, mentre producono un incremento o decremento del numero di impulsi, quando la temperatura cambia. La frequenza di scarica aumenta nei recettori del freddo quando la temperatura sta diminuendo, viceversa per i recettori del caldo. Posseggono un’alta sensibilità dinamica, e questa permette ai recettori di rispondere a piccoli e lenti cambiamenti (meno di 1 °C in 30 s) nella temperatura della pelle. Questi recettori rispondono solo alle variazioni di temperatura e sono insensibili agli stimoli meccanici e a quelli che provocano dolore. In generale, i campi recettivi dei singoli assoni sono superfici di 1 mm2.
Figura 1.2: grafico degli impulsi al secondo per le fibre nervose dei termocettori in funzione della temperatura
Le unità nocicettrici rispondono solo a estreme stimolazioni termiche o meccaniche, queste unità comunque formano una classe distinta di organi sensoriali rilevatori del dolore. Lo studio della risposta alla stimolazione dolorosa ha ricevuto un’enorme attenzione. Ci sono due popolazioni di fibre afferenti nella pelle che contribuiscono alla trasmissione del dolore, entrambe costituite da terminazioni libere non incapsulate: fibre più grandi mielinizzate, e più sottili fibre non mielinizzate.
Ci sono inoltre due principali categorie di nocicettori: i nocicettori meccanici, e termo-meccanici. I nocicettori meccanici hanno fibre melinate e non, rispondono ad una pressione stabile dovuta a compressione della pelle o a penetrazione dell’epidermide da parte di oggetti affilati, e a temperature pulsanti superiori a 50 °C. La risposta presenta una latenza allo stimolo. Questi recettori danno un avvertimento di dolore fisico rapido, formano il sistema segnalatore del dolore rapido o primo dolore.
I nocicettori termo-meccanici possono essere eccitati sia da stimoli termici che meccanici, la caratteristica che li contraddistingue dai precedenti è una risposta immediata e vigorosa a severi stimoli termici con temperatura superiore ai 43-45 °C o molto bassa 2-3 °C. Alla periferia, questi recettori sono fibre non melinate, mentre vicino al nervo periferico hanno una porzione di guaina mielinica. La velocità massima di conduzione del segnale è comunque inferiore a quella dei nocicettori meccanici, quindi segnalano un dolore lento o secondo dolore.
I meccanorecettori nei muscoli, tendini e articolazioni contribuiscono al senso cinestetico di posizione e movimento degli arti. Per quel che riguarda i muscoli, gli spindle sui muscoli contengono due tipi di terminazioni sensoriali: le terminazioni primarie di grande diametro codificano la velocità di cambiamento in lunghezza delle fibre muscolari, l’allungamento; le terminazioni secondarie di più piccolo diametro sono principalmente sensibili alla fase statica dell’attività muscolare. Gli angoli di articolazione sono codificati principalmente dalla lunghezza dei muscoli. Gli organi di Golgi nei tendini sono recettori basati sulla forma degli spindle che si trovano in serie con le fibre muscolo scheletriche; questi recettori codificano la tensione dei muscoli. Per finire, le unità afferenti delle articolazioni codificano principalmente le posizioni delle articolazioni in posizione estreme.
1.1.2 Il percorso verso la corteccia e le maggiori aree corticali.
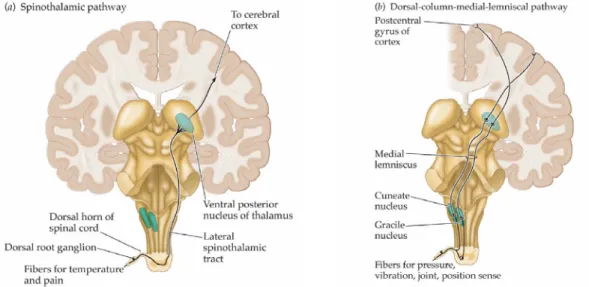
Le unità periferiche nella pelle e nei muscoli si aggregano in fasci di singoli nervi ad ogni livello vertebrale in modo che possano entrare nel midollo spinale. In ogni livello, i loro corpi cellulari si raggruppano insieme alla radice dei gangli dorsali. Le terminazioni prossimali delle unità periferiche entrano, dove formano i due maggiori percorsi ascendenti: il sistema anterolaterale o spinotalamico (figura 1.3a) e il sistema dorsale colonno mediale lemniscale (figura 1.3b). Il sistema dorsale colonno mediale lemniscale porta le informazioni sulle sensazioni tattili e la posizione degli arti. Dei due sistemi questo conduce più rapidamente, perché ascende direttamente alla corteccia con poche sinapsi. Il sistema anterolaterale porta le informazioni sulla temperatura e dolore. Questo percorso è più lento rispetto all’altro sistema, perché coinvolge molte sinapsi tra la periferia e la corteccia. I due percorsi rimangono separati fino a che convergono nel talamo, anche se comunque lì, la separazione è conservata.
Figura 1.3: a: percorso spinotalamico, b: percorso dorsale colonno mediale lemniscale.
L’area corticale primaria ricevente per i sensi somatici, S-I (figura 1.4), si trova nel giro post centrale e nelle profondità del solco centrale. E’ costituito da quattro aree funzionali che sono conosciute come aree di Brodmann 3a, 3b, 1, e 2. Laterale e quasi posteriore a S-I è S-II (figura 1.4), la corteccia sensoriale somatica secondaria, che si trova sopra il solco laterale. S-II riceve i suoi input da S-I. Anche il lobo laterale posteriore riceve input somatici, e queste informazioni lì sono elaborate per funzioni associative di più alto livello, come i processi motori, e integrare i vari input somatici.
1.2 Ruolo dell’esplorazione manuale per percepire le proprietà di un oggetto[2]
I recettori sensoriali sotto la pelle, nei muscoli, tendini e articolazioni, vengono attivati non solo attraverso il contatto con un oggetto ma attraverso il movimento. Lederman e Klatzky[3] hanno notato un modo tipico con il quale gli oggetti sono esplorati, quando le persone cercano le informazioni su particolari proprietà degli oggetti. Per esempio, quando le persone cercano di sapere quale tra due oggetti è quello più rugoso, tipicamente scorrono le loro dita lungo le superfici dell’oggetto, si tratta di un azione di “procedura esplorativa”. Le principali procedure esplorative che vengono descritte sono:
• Il movimento laterale, associato con il riconoscimento delle superfici e caratterizzato dalla produzione di forze tangenziali tra pelle e oggetto;
• Contatto statico, associato con la valutazione della temperatura, e caratterizzato dal contatto con la massima superficie di pelle e senza movimento;
• Chiusura, associata con la valutazione del volume e della forma grossolana, è caratterizzato dall’avvolgere la superficie con la mano senza usare alte forze;
• Pressione, associata alla valutazione della complianza dell’oggetto, è caratterizzato dall’applicazione di forze sull’oggetto, mentre una controforza è esercitata per mantenere la sua posizione;
• Mantenimento, associato con la valutazione del peso, caratterizzato dal mantenimento dell’oggetto in mano spesso con il movimento del braccio;
• Valutazione del contorno, caratterizzato dal movimento del polpastrello lungo i bordi.
In figura 1.5 sono riassunte le principali procedure esplorative.
L’associazione tra le proprietà e queste procedure esplorative utilizzate per la valutazione sono documentate in molti test[4][5][6][2].
1.3 Percezione della rugosità
1.3.1 Definizione di rugosità
Per rugosità di solito si intende una proprietà della superficie del corpo, costituita da microimperfezioni geometriche normalmente presenti sulla superficie o anche risultanti da lavorazioni meccaniche; tali imperfezioni si presentano generalmente come solchi o scalfitture, di forma, profondità e direzione variabili. In generale quindi la rugosità è una caratteristica della superficie che identifica la sua irregolarità.
In meccanica e disegno industriale, dove alla rugosità si vuole dare un valore numerico, la rugosità viene calcolata come la somma dei quadrati degli scostamenti, all’interno della lunghezza base, rispetto a una linea media, ovvero una linea di riferimento avente la forma del profilo nominale.
Le definizioni precedenti cercano di spiegare in modo oggettivo cosa è la rugosità, in realtà una persona quando valuta una superficie più o meno ruvida fa una valutazione soggettiva di una percezione fornita da quella superficie, la valutazione della rugosità di una superficie tipicamente coinvolge l’integrazione di informazioni da molti dei nostri sensi, la rugosità è il prodotto mentale di un processo percettivo integrativo. La rugosità percepita di una superficie esplorata con il tatto può essere definita come una sensazione soggettiva, che dipende dalle caratteristiche fisiche della superficie.
La superficie di un oggetto ha elementi in rilievo rispetto a un substrato relativamente omogeneo. La superficie può essere caratterizzata come macrostrutturata o microstrutturata, relativamente alla spaziatura tra gli elementi della superficie. Meccanismi diversi sembrano mediare la percezione di rugosità in queste due scale. In una superficie microstrutturata, gli elementi sono spaziati a intervalli dell’ordine dei micron; in una superficie macrostrutturata, la spaziatura è uno o due ordini più grande. Quando gli elementi sono più radi sulla superficie, con una spaziatura dell’ordine dei 3-4 mm, le persone tendono a essere riluttanti a caratterizzare la superficie come strutturata. Piuttosto, appare essere una superficie liscia caratterizzata da irregolarità.
1.3.2 Tecniche e procedure di studio
Molte ricerche psicofisiche sulla percezione delle superfici con il tatto si sono concentrate sulla percezione della rugosità, uno degli attributi della superficie più importanti[7].
Gli studi rivelano che la discriminazione delle superfici aumenta se c’è movimento tangenziale tra le superfici e la pelle[8], questo movimento viene definito laterale; infatti le persone se devono identificare un oggetto non visibile procedono con serie di azioni manuali sull’oggetto, queste azioni servono per una migliore percezione dell’oggetto e sono eseguite in una specifica maniera in accordo con la caratteristica che si vuole valutare, questi movimenti sono chiamati procedure esplorative. Per valutare meglio la rugosità delle superfici si usa il movimento laterale perché sembra produca forze tangenziali tra la superficie e l’oggetto.
La percezione della rugosità in realtà è una combinazione di vari stimoli di natura diversa; infatti oltre a quelli tattili vengono integrati anche stimoli visivi e uditivi, quindi gli esperimenti vengono svolti su piattaforme che non permettono la visione della superficie analizzata e alcune volte viene introdotto da altoparlanti del rumore oppure vengono fatte indossare delle cuffie per evitare che i soggetti analizzati siano influenzati dal possibile rumore del dito che scorre sulla superficie.
Sono stati fatti studi su come gli stimoli di natura diversa si integrino tra loro, sembra che l’input di un senso sia preferito ad un altro in base all’obiettivo dell’esplorazione; per alcuni obiettivi come valutare la densità spaziale degli elementi superficiali è più adatta la visione, per valutare la rugosità di superfici è migliore il tatto[9]. L’efficacia di un dato stimolo sensoriale può essere determinata dai materiali da analizzare; per esempio la discriminazione di superfici veramente lisce può essere meglio svolta dal tatto rispetto la visione[10].
Per lo studio della percezione tattile di superfici si può utilizzare sia un’esplorazione passiva, che avviene usando strumenti che muovono le superfici e mantengono fermo il dito, sia un’esplorazione di tipo attivo, che lascia il dito libero di esplorare una superficie che è ferma. Sembra che il modo in cui avviene l’esplorazione non influenzi la discriminazione delle superfici[11][12], ultimamente comunque si stanno cercando dei nuovi strumenti per comparare le caratteristiche dei due tipi di esplorazioni, nel caso siano presenti delle differenze[13].
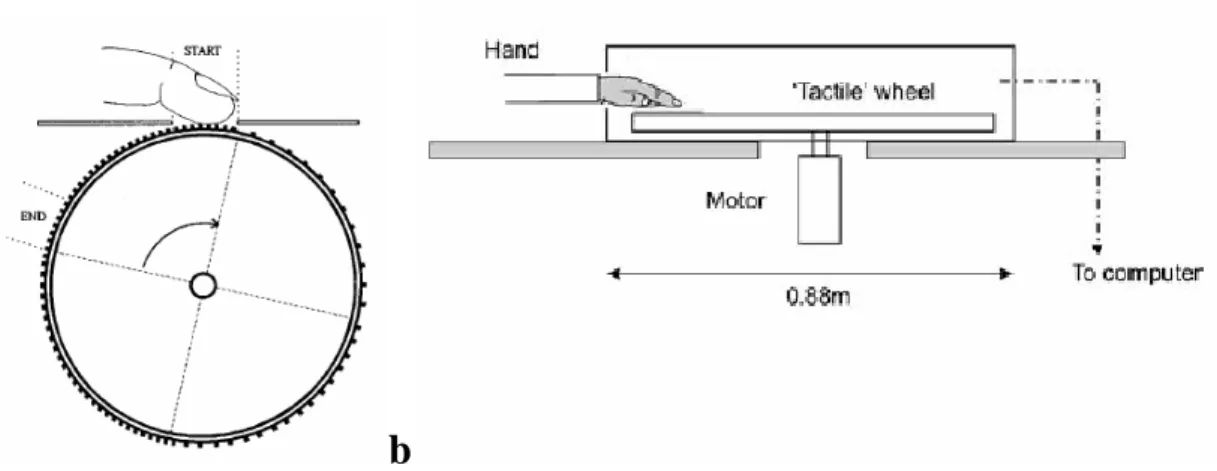
Nelle piattaforme di tipo passivo utilizzate[14][15][16] le superfici da analizzare sono fatte aderire o sulla circonferenza di una ruota (figura 1.6a) o sulla superficie di un disco (figura
1.6b), la ruota o il disco sono motorizzati, in questo modo le superfici sono movimentate. Il sistema di solito si trova all’interno di una teca opaca, e attraverso un’apertura è possibile inserire il braccio o la sola mano. Il dito del soggetto deve essere collocato su una piccola finestra, che permette il contatto di questo con la parte di superficie che si vuol far analizzare. Il braccio e la mano di solito sono mantenuti fermi in posizione supina tramite dei sostenitori. Sensori ottici si trovano sul motore per monitorare la velocità di presentazione dello stimolo. Qualche volta è presente anche un altro sistema di attuazione verticale monitorato da strain gage per mantenere costante la forza di contatto applicata, altrimenti può essere presente solo il sensore per monitorare una possibile variazione di questa forza.
a
b
Figura 1.6: piattaforme passive a: piattaforma costituita da ruota motorizzata, b: piattaforma costituita da disco movimentato.
Le piattaforme attive, come quelle passive, di solito vengono collocate in una teca opaca per limitare gli stimoli visivi, con un’apertura, che permette l’inserimento della mano; il dito è libero di muoversi per esplorare la superficie, le traiettorie dell’end effector possono essere monitorate utilizzando un sistema di sensori ottici, o a infrarossi con marker posizionati sul dito[17], o tramite videocamera[18], oppure se si utilizza una cella di carico[19][20] (figura 1.7), posizionata sotto la superficie da analizzare, i valori relativi alle forze e ai momenti, oltre a fornire i valori delle forze di contatto, possono essere rielaborati per valutare le varie posizioni del polpastrello.
Figura 1.7: piattaforma attiva che utilizza una celle di carico sotto la superficie da analizzare
Le superfici analizzate includono superfici abrasive e superfici con pattern controllati: a grata, che alternano cioè linee rialzate a solchi, o con punti in rilievo. Semplici pattern come quelli a grata o con punti in rilievo sembrano essere di aiuto nello studio; infatti gli elementi che compongono queste superfici possono essere facilmente variati in dimensioni e in spaziatura, è più facile quindi individuare le caratteristiche geometriche critiche o la combinazione di caratteristiche sulla quale la percezione della rugosità è basata.
Delle superfici a grata possono essere variati gli spazi tra le linee in rilievo, la larghezza delle linee, e l’altezza di questi elementi. L’altezza degli elementi può essere un parametro variabile anche per superfici con punti in rilievo. Oltre alla spaziatura tra gli elementi nella direzione longitudinale, la spaziatura tra gli elementi nella direzione trasversale è un altro elemento variabile in queste superfici. Nei vari studi la spaziatura longitudinale tra gli elementi può variare da 1 a 8 mm, l’altezza degli elementi da 1 a 2 mm, la larghezza delle grate da 0.5 a circa 2 mm, la spaziatura trasversale tra punti in rilievo da 1 mm a circa 3. Superfici non controllate variano in modo random geometria e pattern delle macro e microstrutture, questo rende difficile definire le caratteristiche critiche. Superfici non controllate, “naturali”, su cui sono stati fatti studi sono il velluto, il legno, la carta abrasiva, ma anche vari tipi di carta.
Negli studi svolti l’analisi delle superfici avviene utilizzando il polpastrello o dell’indice o del medio. Il soggetto è seduto. Le prove più comuni svolte riguardano il riconoscimento di una certa rugosità: i soggetti sono chiamati a dare un giudizio sulla rugosità di una certa superficie caratterizzata da una determinata geometria degli elementi presenti,
attribuendogli una votazione numerica, oppure vengono svolte delle prove di discriminazione: i soggetti sono chiamati alla valutazione di due superfici, una standard che è di riferimento, e un’altra che viene sostituita dopo ogni prova. I soggetti devono valutare se la rugosità di questa superficie è la stessa di quella di riferimento.
Negli studi svolti con piattaforme per esplorazione attiva, i soggetti possono venir istruiti sul movimento che possono compiere sulla superficie da analizzare, perlopiù viene detto loro di effettuare un movimento tangenziale nella direzione longitudinale della superficie. Sono state fatte prove[12] in cui il dito del soggetto era perpendicolare rispetto alla direzione in cui avveniva l’esplorazione, e prove in cui era parallelo, prove in cui il soggetto poteva fare un singolo movimento sulla superficie, e prove in cui il soggetto poteva svolgere un movimento ciclico avanti e indietro nella solita direzione (figura 1.8), i risultati sono identici. Difficilmente comunque viene data possibilità di movimento più libero.
Figura 1.8: strategie di esplorazione utilizzate negli esperimenti di Lamb[12].
Negli studi svolti con piattaforme passive le superfici possono essere presentate ai soggetti con velocità diverse. Le velocità studiate variano dai 10 mm/sec a circa 200 mm/sec.
1.3.3 Parametri di influenza
Una grande varietà di caratteristiche sembra influenzare la percezione della rugosità. La rugosità percepita di una superficie esplorata con il tatto è una sensazione soggettiva che dipende anche dalle caratteristiche della superficie.
Lederman e Taylor[21][22], in studi condotti con superfici a grata, hanno mostrato che aumentando la spaziatura tra le grate (le linee in rilievo sulle superfici) la maggiore distanza tra le grate fa aumentare la percezione di rugosità. Il valore percepito cresce in modo monotono con l’aumentare dello spazio tra le grate. L’aumentare della larghezza della grata tende a far decrescere la rugosità percepita, comunque questo secondo parametro produce delle variazioni più modeste del valore percepito rispetto alla spaziatura tra grate successive. Sembra però che il rapporto tra la spaziatura tra le due grate e la larghezza della grata non influenzino la percezione della rugosità.
E’ dimostrato che la rugosità percepita aumenta con l’aumentare della spaziatura (figura 1.9), anche utilizzando un array lineare di punti, sia se questo aumento avviene lungo l’asse di esplorazione sia trasversalmente all’asse. Le stime risultano molto più sensibili ai cambiamenti lungo l’asse di esplorazione[23][24][19]. L’aumento dell’altezza degli elementi rialzati aumenta la percezione di rugosità[25].
Figura 1.9: grafico che rappresenta la percezione di rugosità normalizzata rispetto al periodo spaziale[19].
La percezione di una superficie sembra coinvolgere complesse interazioni tra le superfici e il dito che svolge l’esplorazione, è importante anche analizzare i potenziali effetti dei vari parametri di esplorazione. Sono stati considerati quindi altri aspetti oltre la geometria
spaziale della superficie: le forze esercitate su di essa, l’attrito, la velocità di esplorazione e altri parametri che non riguardavano tanto la geometria degli elementi di superficie, quanto l’interazione del soggetto con la superficie.
Aumentando la forza applicata dal polpastrello sulla superficie si nota un aumento del valore della rugosità percepita[21]. Questo fatto in accordo con quanto detto precedentemente fa pensare che un fattore critico per la valutazione della rugosità potrebbe essere la profondità alla quale il dito penetra nella spaziatura, l’area di polpastrello all’interno della spaziatura e lo spostamento della pelle dalla sua posizione di riposo sembrano importanti fattori che contribuiscono alla sensazione di rugosità.
Data l’importanza della forza di contatto e l’importanza del movimento tangenziale per la valutazione della rugosità si può supporre che l’attrito sia un parametro importante. Sorprendentemente gli autori riportano che la lubrificazione superficiale o l’aumento dell’attrito hanno solo effetti limitati sulla stima della rugosità[22][19].
La velocità di movimento relativo tra il dito e la superficie sembra produrre piccoli effetti sulla percezione della rugosità. Si ha solo un piccolo ma significativo decremento della rugosità percepita con l’aumento della velocità da 66 a 206 mm/s. Le velocità di esplorazione di solito si mantengono in un range che va da 60 a 100 mm/s, all’interno di questo range la variazione di velocità non fornisce un mutamento significativo della rugosità percepita[26][24].
Dai risultati ottenuti con la velocità sembra che l’elemento temporale abbia poca importanza quando è risaputo che il movimento del dito è essenziale per la percezione tattile. Questo controsenso ha portato a studi più approfonditi sulla relazione tra la percezione della rugosità e la frequenza temporale Ft degli elementi superficiali. Cascio e Sathian[16], facendo analizzare ai loro soggetti superfici a grate, hanno dimostrato che Ft sembra essere effettivamente un elemento di influenza, ma che la spaziatura tra grate abbia un’influenza più forte; questo forse spiega perchè per precedenti studi[24] il fattore temporale non giocava un ruolo nella percezione della rugosità (figura 1.10).
Figura 1.10: a: grafico della rugosità percepita rispetto alla frequenza temporale degli elementi variandone la larghezza; b: grafico della rugosità percepita rispetto alla frequenza
temporale degli elementi variandone la spaziatura longitudinale. A diversi simboli corrispondono diversi valori di larghezza o spaziatura[16].
Smith e collaboratori[19] nei loro studi hanno scoperto che la velocità di variazione nella forza tangenziale è un significativo determinante della percezione della rugosità. In particolare il valore RMS (root mean square) della velocità di cambiamento della forza tangenziale sembra fortemente correlato con la rugosità percepita (figura 1.11).
Figura 1.11: a: grafico della RMS della derivata della forza tangenziale rispetto al periodo spaziale; b: grafico dei valori di rugosità percepita rispetto al periodo spaziale. Si può
notare come gli andamenti dei due grafici siano simili[19].
Come già accennato, la percezione di superfici “naturali”, non create artificialmente per gli esperimenti, non è facile da analizzare a causa dei pattern random che presentano, e anche perché la percezione e soprattutto il riconoscimento e la discriminazione di una superficie di questo tipo sono influenzati oltre che dalla rugosità anche da proprietà meccaniche, per esempio la durezza della superficie. Ci sono quindi pochi studi che riguardano le superfici di oggetti che si possono incontrare ogni giorno, difficili da descrivere oggettivamente.
Hollins e collaboratori[7] hanno studiato gli stimoli tattili forniti da superfici “naturali” come il legno, velluto, ecc., e suggerito che siano coinvolti tre parametri: uno corrispondente alla rugosità, uno alla durezza, e un terzo provvisoriamente attribuito all’elasticità.
Nel caso si usino superfici costituite da carta, è possibile caratterizzare oggettivamente la superficie per mezzo di un range di parametri quali: l’altezza media degli elementi sulle superfici, la tipica separazione tra i picchi di superficie, ecc.. Non è facile comunque predire come questi parametri influenzino la percezione soggettiva delle superfici. Gli studi di Summers e Irwin[27] affermano però che comunque queste caratteristiche geometriche oggettive sembrano essere poco correlate con la percezione della rugosità.



![Figura 1.8: strategie di esplorazione utilizzate negli esperimenti di Lamb [12] .](https://thumb-eu.123doks.com/thumbv2/123dokorg/7312030.88463/14.892.199.756.490.923/figura-strategie-esplorazione-utilizzate-esperimenti-lamb.webp)
![Figura 1.9: grafico che rappresenta la percezione di rugosità normalizzata rispetto al periodo spaziale [19]](https://thumb-eu.123doks.com/thumbv2/123dokorg/7312030.88463/15.892.310.686.699.975/figura-grafico-rappresenta-percezione-rugosità-normalizzata-rispetto-spaziale.webp)

