Capitolo 1
Descrizione generale del sistema
Struttura del sistema e
Struttura del sistema e
Struttura del sistema e
Struttura del sistema e osservazioni di contorno.
osservazioni di contorno.
osservazioni di contorno.
osservazioni di contorno.
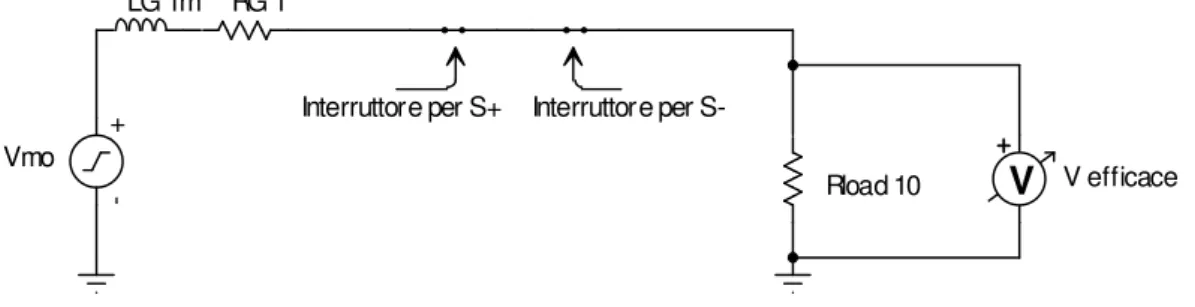
Prima di passare all’esposizione della struttura di controllo che compone il regolatore, è bene porre l’attenzione su alcuni aspetti caratteristici di un sistema composto da un generatore che fornisce elevata potenza all’utilizzatore. Poniamo l’attenzione sul circuito in una delle due situazioni di interruttore chiuso, o quello di destra o quello di sinistra, visualizzata nella figura sottostante e derivata dall’architettura di principio esposta in precedenza (figura 5);LG 1m RG 1
Rload 10 Interruttore per S+ Interruttore per
S -+ Vmo
V
+ V efficaceFigura 1.1. Maglia equivalente del sistema nello stato di conduzione.
Quello che si osserva nella figura 1.1, dove si è approssimato il diodo che tra i due è nello stato di conduzione con un cortocircuito, è che tale circuito, dove
carico in uscita è grande, cioè quando c’è un basso trasferimento di potenza. Ciò significa che più i carichi connessi sono bassi, più il sistema tenderà a presentare in uscita segnali filtrati passa-basso, cosa estremamente utile per il controllo delle emissioni EM, senza entrare per ora nel dettaglio di tali forme d’onda.
Detto questo, è bene porre l’attenzione su un altro fatto contingente al passaggio da uno stato all’altro del circuito; supponiamo di essere in una situazione di regolazione attiva (cioè Vmoeff > Vrms*). Poiché in questo caso sarà sempre necessario limitare il tempo di conduzione, non avverrà mai che i due interruttori siano entrambi chiusi, in quanto si presenterà sempre la necessità di intervalli di tempo in cui non arriva potenza al carico. Si alterneranno quindi, in questa circostanza, tre situazioni salienti, una in cui l’interruttore di destra è chiuso e l’altro aperto e che chiameremo A, una in cui sono entrambi aperti, che chiameremo B, e infine la situazione duale alla prima, in cui conduce l’altro interruttore per la semionda S-, e che denomineremo situazione C. Il circuito funzionerà pertanto nella sequenza descritta dalla stringa A-B-C-B-A-B-C ecc..
In base a questo secondo aspetto, la situazione più semplice da pensare per la parzializzazione dell’onda, è quella descritta nell’immagine di seguito presentata, in cui durante la fase di conduzione gli interruttori entrano nella zona di funzionamento B (aperti) e l’uscita, ovvero la tensione sul carico, va repentinamente a zero. T Vload Time (s) 0.00 750.00u 1.50m 2.25m 3.00m O u tp u t [V ] -10.00 -5.00 0.00 5.00 10.00 Vload
Figura 1.2. Esempio di parzializzazione di una forma d’onda sinusoidale.
In riferimento a questo esempio, data la non linearità degli interruttori, è chiaro che i punti critici per la generazione di spike di tensione e più in generale comportamenti spurî ed effetti parassiti, sono costituiti dal passaggio A-B e C-B, ovvero dal momento in cui gli interruttori diventano entrambi contemporaneamente aperti, in quanto il comportamento inerziale in corrente degli avvolgimenti del motore, comporterà delle sovratensioni proporzionali alla velocità di variazione della corrente nell’intervallo di apertura. Gli istanti di apertura in figura 1.2 sono quelli in corrispondenza dei quali gli archi tornano a zero. Risulta pertanto scontato che il miglior modo per ottenere la regolazione non è quello di figura 1.2, ma quello illustrato di seguito (figura 1.3), in cui gli istanti di apertura vengono sincronizzati con gli istanti in cui la corrente o la tensione del generatore assumono valore nullo (ipotesi di carico resistivo), in modo da annullare o comunque ridurre notevolmente gli spike di tensione sul generatore. T Vload O u tp u t [V ] -5.00 0.00 5.00 10.00 Vload
quasi nulla in ampiezza; ciò che diminuisce è soltanto l’angolo di trasferimento della potenza al carico, con un fianco di discesa molto ripido, ovvero alte componenti frequenziali nella tensione di uscita; tale situazione, pertanto, potrebbe far riferimento ad un carico molto elevato, che non introduce un partitore di tensione con la resistenza interna del generatore e determina una costante di tempo della maglia molto piccola.
Il circuito equivalente della maglia in situazione di conduzione, rappresentato nella figura 1.1, come già accennato è un filtro passa-basso. I valori tipici dell’induttanza interna del generatore sono dell’ordine del mH, a seconda delle dimensioni degli avvolgimenti, a sua volta dipendenti dal tipo di generatore e dalla sua potenza massima, mentre la resistenza interna dell’avvolgimento stesso è dell’ordine dei centinaia di mOhm o Ohm, motivo per cui, ricordando il range di variabilità di un carico automotive per cui è stata pensata l’applicazione (ovvero da valori di centinaia di mOhm a decine di Ohm), è facile avere partizioni significative tra impedenza interna del generatore e carico in uscita; sarà presente inoltre una forte azione filtrante, dati gli alti valori di costante di tempo che ci possiamo aspettare per quei valori di induttanza, resistenza interna e carico di bassa entità. Detto questo, una forma d’onda più verosimile avrà sia ampiezza ridotta che andamento molto dolce, data l’attenuazione delle frequenze superiori alla fondamentale. Una tale situazione è raffigurata in modo ancora qualitativo in figura 1.4 a seguire; si parla di andamento qualitativo in quanto la tensione di uscita del generatore (ovvero a valle della sua impedenza interna) è rappresentata come sinusoide ideale, ma ciò è vero soltanto in condizione di circuito aperto o carico molto maggiore dell’impedenza del generatore, mentre così non può essere dato che il carico visto dal generatore stesso, è costituito sia dal carico vero e proprio che dagli interruttori serie; il carico complessivo quindi, passerà da valore elevatissimo (interruttori aperti, in cui l’andamento è sinusoidale) a valore pari a quello dell’utilizzatore (interruttori chiusi, in cui l’andamento della Vmo è uguale alla tensione sull’utilizzatore); la forma d’onda sinusoidale pertanto, va tenuta in considerazione di puro riferimento temporale e finalizzato ad una descrizione introduttiva del sistema. Verrà data enfasi al comportamento reale della tensione Vmo nei capitoli dedicati alle misure sul circuito di prova.
T Vload Vgen Time (s) 0.00 1.00m 2.00m 3.00m O u tp u t -50.00 -25.00 0.00 25.00 50.00 Vgen Vload
Figura 1.4. Andamento realistico della tensione sul carico.
Descrizione del sistema
Descrizione del sistema
Descrizione del sistema
Descrizione del sistema di
di
di controllo
di
controllo
controllo
controllo....
Date le caratteristiche di un tipico generatore derivante da un motore endotermico, è chiaro che il sistema descritto precedentemente necessita di una parte di controllo capace di mantenere costante la tensione efficace al variare dell’ampiezza, e di mantenere la sincronia tra istanti di apertura e attraversamento per lo zero della tensione generata, al variare della frequenza, oltre che ovviamente, al variare del carico.Il controllo scelto è di tipo classico ad anello chiuso, con guadagno proporzionale-integrativo (P.I.), il cui schema a blocchi è raffigurato in forma generica nella figura 1.5 sottostante:
Figura 1.5. Schema a blocchi di un controllo ad anello chiuso.
Il valore di consegna rappresenta la quantità che la variabile di stato deve eguagliare, e la variabile di stato è, in questo caso, il valore RMS (Root Mean Square) della tensione sul carico, pertanto il valore di consegna sarà una tensione continua di riferimento; l’attuatore nel caso in questione rappresenta invece il sistema regolatore, comprensivo di interruttori ed elettronica di contorno, mentre il trasduttore dovrà fornire informazione sul valore RMS dell’uscita, pertanto sarà un convertitore RMS-to-DC dato che il valore di consegna è fornito come tensione continua. Il controllore è chiamato quindi ad elaborare l’errore sulla variabile di stato e a fornire un cosiddetto
segnale di eccitazione
per l’attuatore.La legge di controllo che regola un generico controllore P.I.D. può eseguire tre tipi di operazione:
− un’azione proporzionale all’errore; − un’azione integrativa sull’errore; − un’azione derivativa sull’errore;
L’azione proporzionale è in sostanza un guadagno puro ed ha lo scopo di amplificare il segnale errore e sostenere la reazione negativa che determina il comportamento regolativo del sistema. Considerando momentaneamente solo tale componente e rimandando le considerazioni sulle altre due azioni, si va ad analizzare la parte di attuazione del regolatore.
Controllore Attuatore Trasduttore Valore di consegna Segnale di eccitazione Uscita Variabile di stato Vmo(f) + -
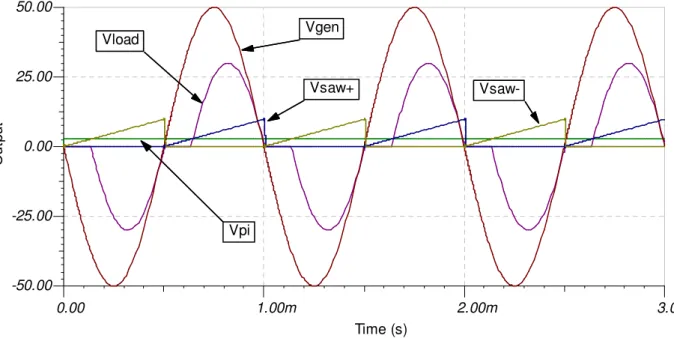
L’idea che sta alla base della soluzione proposta prevede, in linea di principio, di generare delle onde a dente di sega (dette “sawtooth”, segnali Vsaw+ e Vsaw- in figura 1.6), sincrone rispetto alla forma d’onda in uscita al generatore Vgen, confrontare tali onde con il segnale di eccitazione Vpi, generato dal controllore in dipendenza della tensione efficace misurata sul carico, e determinare gli istanti di apertura e chiusura degli interruttori in base all’esito del confronto, come illustrato in figura 1.6, dove è rappresentata una situazione statica di regime dei segnali caratteristici del sistema di controllo e attuazione.
T Vload Vpi Vgen Vsaw+ Vsaw-Time (s) 0.00 1.00m 2.00m 3.00m O u tp u t -50.00 -25.00 0.00 25.00 50.00 Vpi Vsaw-Vsaw+ Vload Vgen
Figura 1.6. Schematizzazione della famiglia di segnali che caratterizzano il metodo di controllo.
T Vload Vpi Vsaw+ Vsaw-Time (s) 0.00 1.00m 2.00m 3.00m O u tp u t -30.00 -15.00 0.00 15.00 30.00 tdown tup Vpi Vsaw-Vsaw+ Vload
Figura 1.7. Segnali salienti con istanti di accensione tup e tdown, rispettivamente per la semionda positiva e per quella negativa.
L’istante di accensione dell’interruttore per ciascuna semionda, si ha quando la relativa onda a dente di sega supera la tensione di soglia Vpi, mentre l’istante di spegnimento quando lo stesso segnale torna basso. Da questa comparazione vengono generati quindi, in prima analisi, degli impulsi di accensione per gli interruttori. Poiché la tensione Vpi è generata in modo direttamente proporzionale all’errore, secondo il fattore di amplificazione G del controllore, all’aumentare dell’errore per un aumento della tensione di statore, aumenterà anche la tensione Vpi; tale tensione, confrontata con le onde triangolari (di ampiezza di picco fissa) determinerà una diminuzione degli intervalli di conduzione, in quanto ritarderanno gli istanti di attraversamento positivo da parte delle onde sawtooth della soglia Vpi, determinando quindi un ritardo dell’accensione degli interruttori. In tal modo l’intervallo di tempo in cui ciascun interruttore sta chiuso diminuirà, così come l’area degli archi di tensione sul carico e parimenti la sua tensione efficace.
Avere però un comportamento del controllore puramente proporzionale, non permette di annullare l’errore a regime, in quanto la tensione Vpi deve rimanere non nulla al fine di sostenere l’eccitazione del regolatore, come illustrato nella seguente formalizzazione matematica del controllo attuato sul regolatore in questione.
Si definiscono le seguenti quantità:
− G guadagno del controllore puramente proporzionale − Vmo tensione di uscita del motore
− Vmoeff valore efficace della Vmo
− Vpi tensione di uscita del controllore
− Vout tensione sul carico
− Voutmax valor massimo della Vr
− Vrms tensione efficace sul carico
− Vrms* valore di consegna
− Vsaw segnale onda a dente di sega
− Vsawmax valor massimo della tensione VT
− t* istante di chiusura dell’interruttore nella semionda considerata − f frequenza della tensione Vmo
Si impongono inoltre alcune semplificazioni che non pregiudicano la bontà del modello matematico descrittivo del sistema:
1: f costante
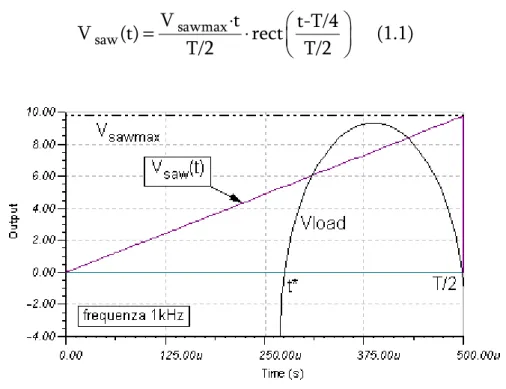
Le onde triangolari, assunte come unico segnale, sono descritte dall’espressione: sawmax saw
V
t
t-T/4
V
(t)
rect
(1.1)
T/2
T/2
⋅
=
⋅
Figura 1.8. Onda a dente di sega (sawtooth) Vsaw(t) e tensione sul carico Vload.
valida per 0<t<T/2, e dall’ipotesi 3 deriva che:
rms moeff
V
=V
⋅
(T/2-t*) 2/T (1.2)
⋅
da queste premesse e considerando l’istante di chiusura degli interruttori t* si ha che:
( )
saw pi sawmaxV
t* =V =V
⋅
t* 2/T (1.3)
⋅
e max eff rms rms moV
=V
(t*=T/2)=V
(1.4)
segue che:(
)
* *(
) 2
max rms rms pi sawmax rms rms2
(V
-V
) G(t)=V =V
t*
= V
T/2-t*
/T-V
G(t) (1.5)
T
⋅
⋅
⋅
⋅
⋅
Dalla (5) si ricava l’espressione di t*:
max *
2
2
2
2
max max * sawmax rms rms rms rms rmsT
T
T
T
V
⋅
t*= V
−
t*
−
V
⋅
⋅
G=G V
⋅
⋅
−
V
⋅
t* G-V
⋅
⋅
⋅
G (1.6)
(
max *)
2
rms rms Tmax rmsV
V
G
T
t*=
(1.7)
V
+V
G
−
⋅
⋅
⋅
Sostituendo l’espressione di t* in max
2
2
rms rmsT
V
=V
t*
T
⋅
−
⋅
si ricava:(
*)
2
2
2
moeff rms rms moeff sawmax moeffV
V
G
T
T
V
=V
(1.8)
V
+V
G
T
−
⋅
⋅
−
⋅
⋅
⋅
*1
moeff rms rms moeff sawmax moeff(V
V
) G
V
=V
(1.9)
V
V
G
−
⋅
⋅
−
+
⋅
Dalla (1.9) si evince che per un valore di G finito il valore di regime Vrms
che rappresenta l’uscita del sistema, non eguaglia il valore di riferimento Vrms*.
Ovvero, definendo l’errore come
ε=V
rms−
V
rms* vale che:lim
rms rms* G→∞V
=V
, daproporzionale del controllore dovrà essere limitata e richiederà l’ausilio di una componente integrativa.
L’azione integrativa del controllore permette infatti di avere un guadagno elevato soltanto in continua e a frequenze basse, caratteristica che garantisce di avere errore tendente a zero in situazione di regime, ma un guadagno limitato a quello della componente proporzionale, in situazione dinamica; in altri termini, l’operazione di integrazione permette di sostenere il regolatore con un segnale di eccitazione Vpi non nullo anche se l’errore di ingresso al regolatore è pari a zero, senza incorrere in fenomeni di instabilità. Esistono poi dei contro effetti introdotti dalla presenza di una componente integrativa, in quanto l’operazione di integrazione introduce una memoria nel sistema e quindi un’inerzialità nella risposta ai transitori, che si traduce in un rallentamento complessivo del sistema di regolazione. Un buon controllo deve quindi prevedere un dimensionamento opportuno dei parametri del controllore, per annullare l’errore a regime senza inficiare in modo sensibile nella velocità di risposta.
La terza componente infine, quella derivativa, ha effetti duali rispetto a quelli dell’integratore e viene utilizzata soprattutto in sistemi con costanti di tempo caratteristiche molto lunghe, ma soggetti a variazioni repentine delle condizioni al contorno (per esempio un motore controllato in velocità e soggetto a variazioni istantanee del carico meccanico); in questi casi infatti anche l’integratore dovrà essere tarato in modo da rispondere con tempi dello stesso ordine di grandezza e quindi introdurrà una forte inerzialità; l’aggiunta di una componente derivativa permette allora di compensare l’effetto integrativo in regime dinamico e velocizzare l’azione correttiva, ovvero rispondere in tempi brevi alle rapide variazioni dell’errore di ingresso al controllore ed evitare lunghe oscillazioni della variabile do stato nell’intorno al valore di regime.
Nel caso in esame, data la necessità di regolare una variabile elettrica, a fronte di una variazione ancora elettrica ma di origine meccanica (la variazione della rotazione di statore), si è ritenuto superfluo introdurre una componente derivativa, in quanto una variazione meccanica di questo tipo ha tempi caratteristici più lunghi o dello stesso ordine di grandezza di quelli d’assestamento tipici di una regolazione di potenza elettrica.
Si considera ora soltanto le variazioni delle quantità finora introdotte, e per il controllore la sola componente integrativa. Passando al dominio delle frequenze generalizzate S, la risposta del controllore sarà del tipo:
I
K
G(S)=
S
conK
Icostantee, poiché alle variazioni la quantità Vrms* è nulla (in quanto costante),l’espressione
dell’errore diviene: * I moeff moeff rms rms moeff I sawmax moeff
K
V
(V
V
)
S
ε(S)
V
(S)=V
(1.10)
K
V
V
S
⋅
−
⋅
=
−
+
⋅
Dalla 1.10, per trovare il valore di regime, si ricorre al teorema del valore iniziale e finale, secondo cui, data una generica funzione A(t) e la sua corrispondente nel dominio della frequenza A(S), vale che:
0
lim
lim
t→∞
A(t)
S→S A(S)
=
⋅
che applicata alla (1.10) fornisce il risultato:
* 0
lim
lim
I moeff moeff rms moeff t S I sawmax moeffK
V
(V
V
)
S
ε(t)
S
V
=0 (1.11)
K
V
V
S
→∞ →
⋅
−
⋅
=
⋅
−
+
⋅
Come indicato dalla teoria del controllo esposta, effettivamente l’errore risulta annullato se la risposta del controllore ha il denominatore della risposta in
Figura 1.9. Schematizzazione della non-linearità del sistema di regolazione.
Sebbene sia stato introdotto il blocco di moltiplicazione, la presenza dell’integratore, impone, come visto, che all’ingresso dello stesso vi sia un segnale nullo, determinando in altri termini l’uguaglianza tra uscita Vrms e valore di consegna Vrms*. Generalizzando, si può quindi affermare che l’introduzione di una non-linearità a valle del controllore proporzionale-integrativo, ammesso che mantenga il sistema in condizione di stabilità, non comporterà in uscita la presenza di un errore, grazie alla reazione negativa e alla parte integrativa del controllore.
Schema a blocchi complessivo.
Schema a blocchi complessivo.
Schema a blocchi complessivo.
Schema a blocchi complessivo.
Lo schema a blocchi che riassume l’architettura del sistema sviluppato, è illustrato in figura 1.8 di seguito riportata:Vrms* Vmo Vmo Vmo LG 1m RG 1 Rload 10
Interruttore per S+ Interruttore per
S-Diodo per S- -+ Vmo Diodo per S+ Freq-Meter Vfreq Vmo Sawtooth Generator Vsaw-ZeroCrossi ng Vfreq Vsaw+ TRMS Vrms Vin U5
PI
* controller Switch Driver OFF-UP OFF-DOWN ON-DOWN Vpi Vsaw+ Vsaw-zerocrossing ON-UP Zero Crossing Zero-Crossing Vmo-Figura 1.9. Schema a blocchi del sistema completo, realizzazione completamente analogica.
Si nota la struttura già vista nella parte introduttiva (figura 1.5). A partire dal carico, avviene una lettura della tensione efficace per merito di una conversione RMS-DC, la cui uscita viene inviata, previo confronto differenziale con la Vrms* desiderata, al controllore proporzionale-integrativo, che fornisce la
l’utilizzo delle informazioni di zero-crossing, anche quelli per il mantenimento degli interruttori nello stato aperto.
Specifiche della realizzazione oggetto di tesi
Specifiche della realizzazione oggetto di tesi
Specifiche della realizzazione oggetto di tesi
Specifiche della realizzazione oggetto di tesi....
Come si evince dall’introduzione al progetto riportata fino ad ora, è chiaro che una siffatta archittettura può essere applicata in molteplici casi con un’ampia varietà di condizioni al contorno, quali tipo di generatore e carico utilizzatore connesso a valle degli interruttori. Potranno sussistere molteplici combinazioni di tensione-corrente in ingresso al sistema, e tensione desiderata in uscita, non che spettro di frequenze d’utilizzo, rispetto alle quali gli interruttori e le altre quantità in gioco dovranno essere dimensionate opportunamente, sia per quanto riguarda la capacità da parte degli interruttori di gestire la potenza richiesta dal carico, sia per le quantità dinamiche che caratterizzano il controllore PI, il frequenzimetro e i generatori di onde sawtooth. Le singole soluzioni dovranno quindi essere dimensionate ad hoc per il particolare caso in cui sono chiamate a lavorare, e potranno differire notevolmente, sia per componenti utilizzati, che per risposta ai transitori, in quanto si dovranno adattare alle specifiche richieste dalle condizioni al contorno. Il caso considerato in questo elaborato fa riferimento ad un utilizzo per ciclomotori di generica cilindrata, con generatore a 12 coppie polari e contempla il pilotaggio di carichi puramente resistivi, come di fatto possono essere considerate le lampade ad incandescenza, tipico carico presente a bordo di un veicolo a due ruote. Fissato quindi il numero di coppie polari p=12, e ipotizzando un range di variazione del numeri di giri del motore pari a 1500÷15000rpm, si ottiene una frequenza della sinusoide variabile tra 300Hz e 3kHz. La tensione di uscita massima a vuoto è tipicamente dell’ordine delle centinaia di Volt, e può essere fissata, a scopo di riferimento per la progettazione del sistema, a 300Volt; a seconda del tipo di generatore potranno poi essere effettuate modifiche opportune per una taratura ad hoc del sistema di regolazione. Riassumendo, il dimensionamento del progetto è stato eseguito nel rispetto delle seguenti specifiche:− Tensione massima del generatore Vmomax=300V
− Corrente efficace massima richiesta dal carico Irmsmax=10A
− Frequenze di erogazione della tensione fmin=300Hz, fmax=3000Hz − Risposta ai transitori inferiore a 50ms