Capitolo 1
RISONANZA MAGNETICA NUCLEARE
1.1
LA RISONANZA MAGNETICA
La Risonanza Magnetica per Imaging (Magnetic Resonance Imaging - MRI) è una tecnica usata principalmente in campo medico per produrre immagini ad alta risoluzione di organi o tessuti del corpo umano, consentendo indagini morfologiche, funzionali e patologiche in breve tempo. Essa è relativamente recente: fu scoperta nel 1946 da due fisici americani, Bloch e Purcell, entrambi premi Nobel per la Fisica nel 1952. Tale tecnica nacque come metodica spettrometrica utilizzata dai biochimici per studiare la struttura chimica delle sostanze, ma fu soltanto nel 1977 ad essere applicata in campo diagnostico, prevalentemente nel settore neurologico, invece in Italia fu utilizzata per la prima volta dagli anni ‘80 [1, 2, 3].
Adesso, la risonanza magnetica può essere usata per la diagnosi di una grande varietà di patologie che coinvolgono gli organi e i tessuti del corpo umano, soprattutto quelli molli, ricchi di acqua e quindi di atomi di idrogeno: questi ultimi sono molto importanti per il suo funzionamento, come vedremo nei prossimi paragrafi.
Grazie al fatto di essere non invasiva, né dal punto di vista dell’energia che utilizza, poiché non si avvale di radiazioni, né dal punto di vista dell’esecuzione dell’esame, l’MRI è una delle più valide metodologie di indagine clinica ancora in piena evoluzione. Le immagini che si ottengono con questa tecnica sono molto dettagliate non solo sul piano trasversale del corpo (come avviene per la TAC), ma anche su sezioni posizionate su qualunque piano (sagittale e frontale), ottimizzando così la visualizzazione dell’area in esame. In questo modo diventa possibile rappresentare strutture completamente diverse sulla stessa immagine, contrariamente a quanto avviene nella TAC (Tomografia Assiale Computerizzata). I suoi limiti sono costituiti dal costo ancora elevato ed, inoltre, la risonanza magnetica è controindicata a portatori di pace-maker cardiaci o di protesi dotate di circuiti elettronici, di clips vascolari o schegge di materiale ferromagnetico, in quanto interferirebbe con essi.
In futuro la diagnosi con la risonanza magnetica è destinata a compiere ulteriori progressi su almeno tre fronti: si tenderà ad utilizzare campi magnetici sempre più intensi; a mettere a punto tecniche di elaborazione dei dati sempre più sofisticate per avere immagini in tempo quasi reale, in quanto adesso la RM è un esame piuttosto fastidioso, perché richiede la totale immobilità per tutta la durata (mezz’ora e oltre); ad avere non più soltanto un’immagine delle lesioni, ma anche dati che permettono di
individuare il difetto metabolico che sta alla base di una malattia (diagnosi molecolare) [3, 4, 5, 6].
1.2 PRINCIPI DELLA RISONANZA MAGNETICA
NUCLEARE
L’MRI è basata sui principi della Risonanza Magnetica Nucleare (Nuclear Magnetic Resonance - NMR), una tecnica spettroscopica usata per ottenere informazioni di tipo microscopico, chimico e fisico, sulle molecole [2].
Infatti, le immagini che si ottengono sono essenzialmente delle mappe rappresentative della distribuzione di densità dei nuclei di idrogeno e dei parametri che riflettono il loro movimento nei liquidi cellulari e nei grassi, essendo la quasi totalità dell’Imaging impostata sull’idrogeno. Tale nucleo è, fra i vari nuclei, quello più adatto perché non ha neutroni, ma ha un solo protone e poi perché è l’atomo più fortemente presente nel corpo umano, sia sotto forma di acqua (il corpo è costituito per il 70% di acqua), che legato chimicamente a formare proteine, grassi, zuccheri.
La NMR sfrutta la perturbazione indotta da onde elettromagnetiche della gamma delle radiofrequenze (RF) su di un sistema, i cui nuclei atomici sono immersi in un campo magnetico statico abbastanza elevato. Con tale tecnica si misurano appunto i
quindi in punti di grigio che vengono visualizzati attraverso l’uso di un monitor: se un tessuto è ricco di acqua risulta molto chiaro, se povero appare scuro [5, 6, 7].
Il fenomeno della risonanza magnetica si basa sul fatto che in natura esistono alcuni atomi, i cui nuclei hanno proprietà magnetiche ossia si comportano come piccoli magneti. I nuclei atomici sono masse cariche positivamente composte da protoni e neutroni ed alcuni di essi sono dotati di un movimento di rotazione angolare attorno al proprio asse (moto di spin) ed è sede di un momento angolare. Questo movimento delle cariche produce un campo magnetico, così che il nucleo può essere considerato come un dipolo con un momento magnetico. Da un punto di vista magnetico, il comportamento di un sistema di atomi è descritto dal vettore di magnetizzazione M , definito dalla somma vettoriale dei momenti magnetici elementari associati ai singoli nuclei.
Il corpo umano contiene diverse tipologie di atomi, i cui nuclei possiedono momento angolare; tuttavia all’interno dei tessuti biologici, per effetto della casualità del moto dovuto all’agitazione termica, i nuclei degli atomi che lo compongono sono orientati casualmente, dando luogo ad una magnetizzazione totale nulla (M=0) [7].
Con l’applicazione di un campo magnetico statico B (convenzionalmente 0 orientato secondo la direzione longitudinale indicata dall’asse z), un eccesso di nuclei si allinea parallelamente alla direzione del campo e crea una magnetizzazione netta M . 0
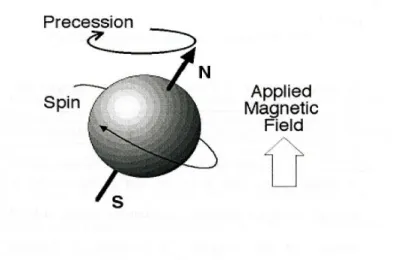
Secondo la teoria elettromagnetica, i momenti magnetici dei nuclei tendono ad allinearsi secondo un moto di rotazione lungo la superficie di un cono ideale attorno al proprio asse, detto di precessione (fig. 1.1) ad una pulsazione ω0, detta di Larmor, legata all’intensità del campo B dalla relazione: 0
0 B0
ω =γ (1.1)
dove γ è il rapporto tra momento magnetico e momento angolare, detto rapporto giromagnetico, che assume valori caratteristici per ogni tipo di nucleo: per il nucleo di idrogeno vale 42.58MHz/T [1, 8].
Con l’applicazione del campo suddetto, nascono inoltre due livelli energetici sui quali si distribuiscono i nuclei atomici a seconda se si orientano in modo da avere la componente secondo z con verso parallelo (up) od antiparallelo (down) dei loro momenti magnetici rispetto alla direzione del campo principale, dando luogo rispettivamente ad un livello statistico a bassa energia ed uno ad alta energia [1]. La differenza numerica di energia tra questi due gruppi è tale da poter consentire di considerare un unico vettore risultante detto vettore di magnetizzazione longitudinale con verso concorde a quello del campo principale, in quanto la popolazione dei nuclei up è superiore a quella dei nuclei down; la magnetizzazione viene denominata così, perché la direzione ˆz , parallela al campo statico B , è detta proprio “longitudinale”, mentre il piano che contiene i versori 0 ˆx , ˆy , è detto “trasverso” [1, 3]. Aumentando l’intensità del campo magnetico statico, cresce proporzionalmente anche quella del vettore di magnetizzazione longitudinale con conseguente aumento della quantità di segnale utile per le immagini RM.
Fig. 1.1 – Movimento di precessione del nucleo atomico
I nuclei vengono irradiati con campi elettromagnetici a radiofrequenza, B , 1
generati dalle bobine RF: se B è caratterizzato da una polarizzazione circolare sul piano 1 perpendicolare alla direzione di B , se la sua frequenza è pari a quella di risonanza per il 0 sistema di nuclei, una frazione di nuclei che si trova a bassa energia assorbe energia e salta nello stato ad alta energia [7].
Quindi l’energia di eccitazione E da fornire ad un nucleo per portarlo dalla configurazione energetica minima a quella massima è fornita dall’equazione di Planck:
0
E= hω (1.2)
dove h è la costante di Planck divisa per 2π e ω0 è la pulsazione data dalla frequenza
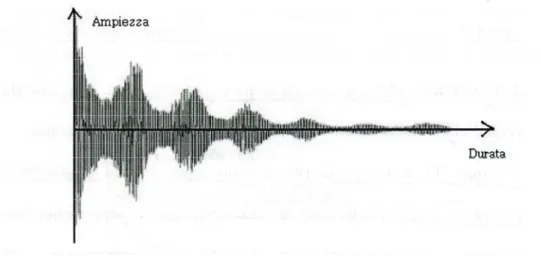
Appena terminata l’irradiazione da parte del campo RF i nuclei in eccesso nello stato ad alta energia tendono a tornare nelle condizioni iniziali (cioè nello stato di minima energia), cedendo l’energia accumulata durante l’eccitazione. Questo riassetto energetico degli spin, detto rilassamento, comporta l’emissione di un segnale RM chiamato Free Induction Decay (FID) alla frequenza ω0, che viene captato mediante un’antenna sensibile alla componente di campo RF, posta perpendicolarmente alla direzione del campo statico (bobina RF di ricezione) (fig. 1.2).
Fig. 1.2 – Segnale RF o Free Induction Decay (FID)
Quindi, sarà possibile perturbare i nuclei mediante un campo magnetico a radiofrequenza B trasversale rispetto all’asse longitudinale e oscillante ad una frequenza 1 esattamente corrispondente a quella di precessione dei nuclei di idrogeno [1]. Il campo magnetico a radiofrequenza trasmette energia ai nuclei mediante un impulso RF ed in funzione della durata dell’applicazione del campo a radiofrequenza avremo un maggiore
o minore assorbimento di energia da parte dei nuclei, una conseguente variazione della magnetizzazione longitudinale e l’insorgenza di una componente trasversa. Per tali impulsi la durata può andare da alcuni microsecondi ad alcuni millisecondi, e l’inviluppo di tale impulso ha un’ampiezza molto ridotta rispetto all’induzione statica (valori tipici dell’ampiezza dell’impulso RF sono dell’ordine di 50 mT, mentre per il campo statico sono dell’ordine di 1.5 T) [7].
Essendo i nuclei protonici immersi in ambienti molecolari diversi, la cessione di energia avrà modalità diverse in relazione alla composizione chimica dei tessuti: alcuni ostacoleranno la cessione del sovrappiù di energia (rilassamento più lungo), altri ne accetteranno il passaggio (rilassamento più breve).
I principali parametri del segnale RM sono: -) la densità protonica (DP);
-) il tempo di rilassamento longitudinale T1; -) il tempo di rilassamento trasversale T . 2
Il primo termine è la quantità di protoni di idrogeno risonanti per unità di volume di tessuto (voxel). Tale grandezza, responsabile dell’ampiezza del segnale RM, aumenta con l’aumentare dell’intensità del campo magnetico, poiché sarà più elevata la probabilità di allineamento dei protoni nella direzione del campo.
Il tempo T o tempo di rilassamento longitudinale regola il ripristino della 1 magnetizzazione longitudinale dopo un impulso RF.
Il tempo T o tempo di rilassamento trasversale regola l’annullarsi della 2 magnetizzazione trasversale (nel piano x-y) creata da un impulso RF [2].
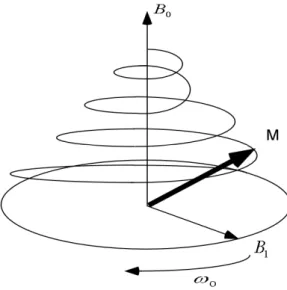
In fig 1.3, quando la fase di eccitazione RF si esaurisce, si evidenzia come la magnetizzazione totale tenda ad orientarsi lungo l’asse z (supposto che la direzione del campo statico B sia l’asse z) per ripristinare il valore di equilibrio di 0 M . 0
Fig. 1.3 – Effetto dell’eccitazione ad RF
Infatti, assumendo come valori iniziali (cioè valori assunti all’istante finale della fase di eccitazione) per le componenti della magnetizzazione i termini Mx0,M ed 0y
0
z
M e risolvendo l’equazione di Bloch [7] si ottiene:
( )
2(
0 0)
0 0 cos sin , t T x x y M t e M ωt M ωt − = − (1.3)( )
2(
0 0)
0 0 sin cos , t T y x y M t e M ω t M ωt − = − (1.4)( )
0 1 1 0 1 t t T T z z M t M e M e − ⎛ − ⎞ = + ⎜⎜ − ⎟⎟ ⎝ ⎠ (1.5)e inoltre possiamo ricorrere anche ad una forma compatta dell’espressione della componente traversa della magnetizzazione, definita come:
x y
M =M + jM (1.6)
con la quale si ha:
(
)
0 0 2 ( ) exp M t =M jω t−t T (1.7) dove M0 =Mx0+ jMy0.La componente trasversa del momento magnetico decade esponenzialmente (decadimento trasversale) con un tempo di rilassamento T ; simultaneamente anche la 2 componente lungo l’asse z del momento totale tende ad allinearsi alla posizione di equilibrio lungo quest’asse, subendo anch’essa un decadimento esponenziale (decadimento longitudinale) con un tempo di rilassamento T . 1
Matematicamente T è il tempo necessario al recupero del 63% del valore 1 della magnetizzazione longitudinale, mentre T è il tempo necessario all’annullamento 2
sembrare legati da una proporzionalità inversa, ma in realtà T è dell’ordine di una decina 1 di volte la costante T ; ciò dipende dalla struttura molecolare nella quale si trovano i 2 protoni.
Riassumendo, al cessare dell’impulso RF il sistema si trova in una situazione di instabilità e l’energia in sovrappiù viene ceduta attraverso i tessuti circostanti che la riemettano sotto forma di segnale FID, la cui intensità massima dipende dalla cosiddetta densità protonica e la durata dalle costanti di rilassamento T e 1 T . 2
I processi di rilassamento hanno un ruolo fondamentale nella tecnica di imaging che utilizza il fenomeno della risonanza magnetica nucleare, poiché variazioni nei tempi di rilassamento tra tessuti biologicamente diversi consentono di evidenziare i contrasti per discriminazioni anatomiche; inoltre, la differenza tra i tempi di rilassamento misurati e quelli di riferimento fornisce un potente meccanismo per la rivelazione di patologie.
1.3
L’HARDWARE IN MRI
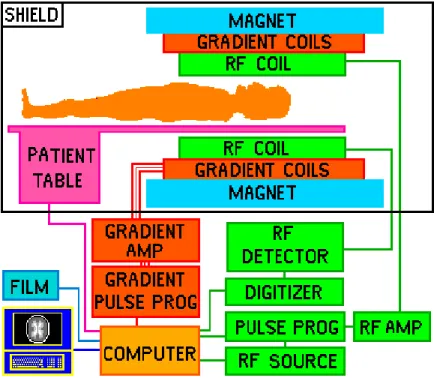
I componenti fondamentali di un sistema di Imaging a Risonanza Magnetica Nucleare sono mostrati in fig. 1.4 [2].
Fig. 1.4 – Schema di un sistema di imaging NMR
Il magnete è il componente principale di un tomografo ed ha il compito di generare un campo magnetico statico B di intensità opportuna, con grande omogeneità e 0
con grande stabilità nel tempo, visto che una bassa omogeneità di campo darà origine ad immagini di scarsa qualità, in quanto i protoni del campione in esame non trovandosi alla stessa intensità di campo magnetico, non risponderanno in maniera uniforme all’impulso
RF e non precederanno alla stessa frequenza di risonanza. In realtà raramente il magnete principale produce un campo sufficientemente uniforme da solo e quindi, per risolvere questo inconveniente, viene utilizzato nella pratica un set di bobine, dette shim-coil.
Esse sono bobine di compensazione utilizzate per aumentare l’omogeneità del campo magnetico, possono essere sistemi passivi od attivi: i primi sono realizzati in fase di costruzione del magnete e correggono le disomogeneità dovute al magnete stesso; i secondi utilizzano bobine inserite internamente all’apparecchio oppure gli stessi gradienti di campo al fine di correggere le disomogeneità nel volume centrale del magnete.
In commercio esistono diversi tipi di magnete che possiedono caratteristiche differenti, ma anche costi di acquisto e di gestione diversi. I più usati sono:
- il magnete permanente, il quale, formato da materiale ad alta memoria magnetica, è in grado di fornire campi con un’intensità relativamente bassa, che vanno da 0.05 T a circa 0.4 T e i costi di acquisto e di gestione sono sufficientemente bassi;
- il magnete resistivo, il quale è paragonabile ad una grossa elettrocalamita in cui circola costantemente corrente;
- il magnete superconduttivo, formato da superconduttori, è in grado di fornire campi con un’intensità maggiore di 0.5 T.
Oggi viene usato per lo più quest’ultimo magnete, che è rappresentato in fig. 1.5:
Fig. 1.5 – Magnete a superconduttore
I gradienti di campo sono bobine che generano campi magnetici variabili nello spazio e nel tempo, sovrapposti al campo magnetico principale. Queste variazioni di
0
B fanno oscillare le regioni del volume in esame ciascuna ad una propria frequenza, ovvero fanno sì che il segnale emesso da in punto dipenda in modo univoco dalla sua posizione nello spazio e pertanto permettono di ottenere informazioni sulla localizzazione spaziale. Vengono utilizzati tre gradienti, ognuno posizionato lungo una delle tre direzioni dello spazio X, Y, Z, attorno al magnete e possono essere di selezione, di preparazione o lettura, permettendo l’identificazione spaziale di ogni voxel in esame e la ricostruzione dell’immagine. Il gradiente di campo magnetico utilizzato è lineare in modo che il campo e la frequenza risultante siano variabili linearmente con la distanza lungo l’oggetto in esame.
I valori dei gradienti variano secondo gli apparecchi tra 0.05 e 1 gauss/cm (1 tesla=1 Wb/m =10.000 gauss) e ciò condiziona lo spessore minimo dello strato e la 2
risoluzione spaziale. Inoltre non funzionano di continuo, ma vengono commutati rapidamente durante le sequenze di acquisizione [7].
Il sistema di trasmissione RF (trattato più dettagliatamente nel prossimo paragrafo) fornisce il campo magnetico a radiofrequenza ed è costituito da un trasmettitore RF (oscillatore accordato alla frequenza di Larmor), da un amplificatore di potenza RF e da una bobina, che genera un campo magnetico ortogonale al campo magnetico principale.
Il sistema di ricezione RF rivela la magnetizzazione nucleare e genera un segnale di uscita che deve essere trattato dall’elaboratore, il quale deve possedere una elevata capacità di calcolo oltre ad una grande memoria ed un’alta velocità di acquisizione dei dati.
Le bobine a radiofrequenza, che rappresentano una componente fondamentale per i sistemi MRI nonché l’oggetto di studio di questo lavoro di tesi, verranno discusse nel prossimo capitolo.
L’elaboratore (computer) rappresenta il cervello del sistema e controlla, tramite opportune interfacce, tutte le operazioni eseguite, come la sintonia delle bobine, la digitalizzazione dei segnali analogici ricevuti, la trasformata di Fourier, la ricostruzione e la visualizzazione delle immagini. Inoltre esegue anche le operazioni di post-processing, come il calcolo di distanze, di superfici e d’intensità di segnale.
1.4 SISTEMA DI RIVELAZIONE
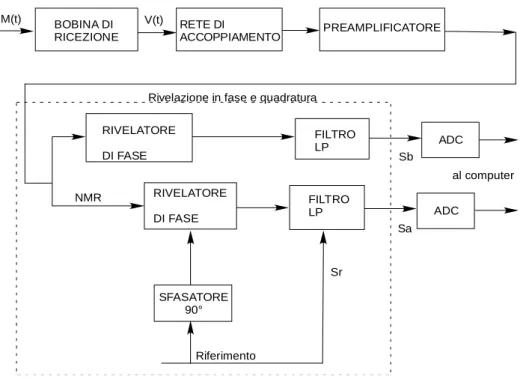
Lo schema a blocchi del sistema che rivela la magnetizzazione nucleare ( , )
M t r e genera un segnale di uscita ( )S t è mostrato in fig. 1.6.
BOBINA DI RICEZIONE RIVELATORE DI FASE FILTRO LP ADC RIVELATORE DI FASE FILTRO LP RETE DI ACCOPPIAMENTO PREAMPLIFICATORE ADC SFASATORE 90° M(t) V(t) NMR Riferimento Sb Sa al computer Sr Rivelazione in fase e quadratura
Fig. 1.6 – Schema a blocchi di un sistema di rivelazione NMR
BOBINE DI RICEZIONE
La bobina di ricezione circonda il campione e si comporta da antenna captando la magnetizzazione nucleare del campione stesso e convertendola in una tensione ( )V t .
La relazione che lega queste due grandezze è la seguente [7]: ( ) ( , ) c( ) d V t t B d dt = −
∫
M r ⋅ r r (1.8)dove Bc( )r descrive la mappa di sensibilità della bobina di ricezione nel punto r ed è
calcolabile come rapporto tra il campo magnetico generato dalla stessa bobina e la corrente che vi scorre. M
( )
t,r è il vettore di magnetizzazione dato dalla somma delle trecomponenti lungo X, Y e Z:
( )
, x( )
, ˆ y( )
, ˆ z( )
, ˆM t r =M t r x+M t r y+M t r z (1.9)
dove Mx
( )
t,r , My( )
t,r ed Mz( )
t r sono stati descritti nel paragrafo precedente. ,La dipendenza della magnetizzazione dal vettore posizione r è dovuta al fatto che si impongono variazioni spaziali sul campo magnetico principale mediante l’applicazione di gradienti di campo per ottenere informazioni sulla localizzazione spaziale e quindi distinguere spazialmente i nuclei, in quanto si suppone eterogeneo il campione in esame [7].
La geometria della bobina e la sua posizione sono tali che il valore della componente trasversale di B r sia la più grande possibile, mentre la componente c( ) longitudinale può essere trascurata, perché da un minimo contributo alla tensione di uscita; ciò è una conseguenza del fatto che la componente M
( )
t r decade lentamente ,con costante di tempo T , tipicamente compresa tra 0.1 s e 1 s, mentre quella trasversale 1 oscilla con periodo compreso tra 0.05 sµ e 0.2 sµ .
Per la sensibilità della bobina si può assumere:
ˆ ˆ
( ) c
B r =ax+by (1.10)
in cui a e b sono delle costanti.
Questa equazione descrive una bobina che ha una sensibilità uniforme verso il campione, ma la cui direzione di massima sensibilità non coincide con la direzione del campo RF applicato: queste assunzioni sono ambedue realistiche, in quanto una bobina progettata correttamente avrà una piccola deviazione rispetto ad una uniformità ideale ma la direzione di massima sensibilità può essere difficile da controllare.
Sostituendo la (1.10) nella (1.8) e ricordando la (1.6) si ottiene:
( )
x( )
, y( )
, Re(
) ( )
,d d
V t aM t bM t d a jb M t d
dt ⎡ ⎤ dt
= −
∫
⎣ r + r ⎦ r= −∫
⎡⎣ − r ⎤⎦ r (1.11)Utilizzando l’equazione di Bloch:
( )
0( )
( )
( )
2
, exp
M t r =M r ⎡⎣jω′ r t−t T r ⎦⎤
e scrivendo 0
( )
cos sin a=k φ′ b= −k φ′ si ottiene:
( )
( )
2( ) cos( )
( )
; t T d V t A e k t d dt ω φ − ⎡ ⎤ ′ ′ = − ⎢ + Θ + ⎥ ⎢ ⎥ ⎣ ⎦∫
r r r r r (1.12)si può notare che l’effetto della bobina di ricezione su Mx
( )
t x è quello di una , moltiplicazione per un fattore k (guadagno che dipende dalla struttura della bobina) e l’introduzione di uno sfasamento φ′ .Per la linearità degli operatori di derivazione e di integrazione:
( )
( )
( )( )
( )
( )
( )
( )
( )
2 0 0 0 2 1 sin 1 cos t T h V t k A e t t d T ω ω ω φ ω ω φ ω − ⎧⎡⎪ ⎤ ′ ′ = ⎨⎢ + ⎥ ⎡⎣ + Θ + ⎤⎦+ ⎪⎣ ⎦ ⎩ ⎫⎪ ′ ′ + ⎡⎣ + Θ + ⎤⎬⎦ ⎪⎭∫
r r r r r r r r r (1.13)dove ωh
( )
r =γh( )
r , in cui h r( )
è il contributo dei gradienti al campo totale. Essendo i termini( )
0 h ω ω r ed( )
0 2 1 Tω r trascurabili rispetto all’unità e
( )
( )
2( )(
( )
)
( )
0 cos t T h V t k A e ω ω t φ d − ⎡ ⎤ ′ =∫
r ⎣ + + Θ + ⎦ r r r r (1.14)in cui tutte le costanti moltiplicative sono incluse in k′ . Riassumendo, la magnetizzazione nucleare M
( )
t,r induce una tensione di uscita V t nella bobina di( )
ricezione, chiamata segnale NMR.RETE DI ACCOPPIAMENTO
La rete di accoppiamento trasferisce il segnale dalla bobina al preamplificatore ed ha lo scopo di realizzare l’adattamento di impedenza fra il carico rappresentato dalla bobina di ricezione ed il cavo di collegamento con gli stadi a valle.
PREAMPLIFICATORE
E’ un amplificatore a radiofrequenza a basso livello di rumore, e quindi ha il compito di rendere sufficientemente bassa la cifra di rumore complessiva della catena di ricezione: il fattore di rumore del primo stadio contribuisce direttamente a quello della catena di ricezione, ed il suo guadagno di potenza disponibile riduce l’effetto della cifra di rumore degli stadi a valle.
RIVELAZIONE IN FASE E IN QUADRATURA
Il rivelatore di fase ha in ingresso il segnale a radiofrequenza NMR il cui spettro è centrato sulla pulsazione di irradiazione ω, ed opera una conversione di frequenza attraverso una frequenza angolare di riferimento pari anch’essa ad ω: se attraverso un filtro passa basso preleviamo la componente in banda base possiamo inviare il segnale così ottenuto ad un convertitore analogico digitale. Il principio descritto è quindi quello del classico ricevitore supereterodina.
CONVERTITORI ANALOGICI-DIGITALI
La conversione del segnale complesso costituito dai due canali in una doppia stringa di numeri digitali
{ }
Sn fornisce:( , )Sn K t e j n td
ω
− ∆
=
∫
M r r (1.15)dove K è il guadagno che dipende dalla struttura della bobina e t∆ è l’intervallo di campionamento.
Questa relazione lega il segnale di uscita campionato S alla magnetizzazione n del campione M( , )t r .
1.5 APPLICAZIONE
DEL
PRINCIPIO DI RECIPROCITA’
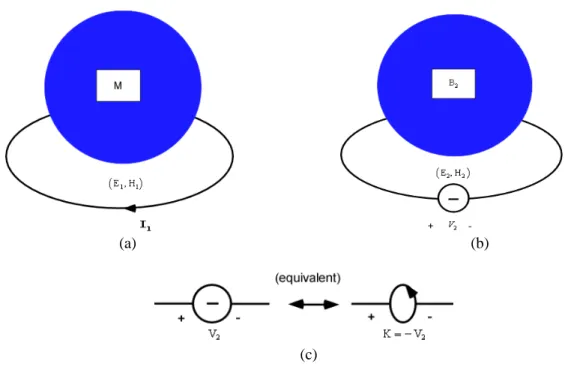
Per capire il concetto di reciprocità e la relazione che c’è tra le proprietà trasmittenti e riceventi di una bobina RF, consideriamo due problemi illustrati in fig. 1.7.
(a) (b)
(c)
Fig. 1.7 – (a) Corrente indotta (I1) in una bobina RF dal vettore di magnetizzazione (M); (b) tensione
2
(V )prodotta da una bobina RF dal campo magnetico (B2); (c) tensione modellabile come una piccola spira di corrente magnetica (K)
Il primo problema visualizzato in fig. 1.7(a), riguarda la corrente indotta (I ) 1
in una bobina RF dal vettore di magnetizzazione M all’interno dell’oggetto che deve essere rappresentato.
Il secondo problema, come mostrato in fig. 1.7(b), riguarda il campo magnetico (B ) prodotto nell’oggetto dalla stessa bobina RF quando questa è alimentata 2 da una tensione V . 2
Alla base del principio di reciprocità si ha che una tensione può essere modellata come una piccola spira di corrente magnetica (K) che circonda un cavo conduttore, e ciò equivale a K= − , come mostrato in fig. 1.7(c). V2
Nel primo caso chiamiamo i campi, elettrico e magnetico, come
(
E H , 1, 1)
invece nel secondo caso, li indichiamo come(
E H2, 2)
.Nel primo problema (fig. 1.7a)
(
E H soddisfano le equazioni di Maxwell: 1, 1)
1 iωµ0 1 iωµ0
∇×E = H + M (1.16)
1 iωε 1;
∇×H = − E (1.17)
invece nel secondo, (fig. 1.7b),
(
E H2, 2)
soddisfano le seguenti equazioni:2 iωµ0 2 m
∇×E = H −J (1.18)
2 iωε 2
dove J indica la densità di corrente magnetica di una piccola spira percorsa da una m corrente magnetica K. Le equazioni (1.16) e (1.18) vengono moltiplicate rispettivamente con H e con 2 H : sottraiamo il secondo risultato da quello precedente. Integriamo 1
sull’intero volume di
(
E H1, 1)
e di(
E H2, 2)
e applichiamo il secondo teorema di Green, ottenendo:(
1 2 2 1)
ˆ V(
1 m 2)
S nds H iω dv × − × ⋅ = ⋅ + ⋅∫∫
H E H E∫∫∫
J B Mw
(1.20)dove S indica la superficie racchiusa dal volume V. Poiché V è un volume infinito, S può essere considerato come una superficie sferica, con un raggio che tende all’infinito. Per ogni punto di questa superficie,
(
E H e 1, 1)
(
E H2, 2)
possono essere considerate come onde piane i cui campi elettrico e magnetico sono legati da:1=Z0 1×nˆ 2 =Z0 2×nˆ
E H E H (1.21)
dove Z0 = µ ε0 0 è l’impedenza d’onda nello spazio libero. Sostituendo l’equazione
(1.21) nella (1.20) si riesce a dimostrare che l’integrale di superficie a primo membro è nullo, per cui risulta:
1 m 2 .
V ⋅ dv= −iω V ⋅ dv
L’integrale che si trova a sinistra può essere scritto come:
1 m 1 1 2 1
V ⋅ dv=K c dl=KI = −V I
∫∫∫
H Jv
∫
H (1.23)dove c rappresenta una spira chiusa, dalle equazioni (1.22) e (1.23) otteniamo finalmente la corrente indotta dalla magnetizzazione nella bobina RF:
1 2 2 . V i I B dv V ω =
∫∫∫
⋅M (1.24)Dall’equazione (1.24) perveniamo a due conclusioni. In primo luogo, poiché
1
I è proporzionale al campo magnetico B prodotto da una bobina RF per una data 2 V , si 2
ottiene che un’efficiente bobina trasmittente è anche un’efficiente bobina ricevente. Secondariamente, se una bobina RF è usata in trasmissione, può generare un campo omogeneo B all’interno dell’oggetto che deve essere rappresentato, quando è 2 utilizzata per la ricezione, deve captare i segnali prodotti dalla magnetizzazione M con lo stesso guadagno per ogni punto del volume di interesse.
Infine possiamo notare che l’equazione (1.24) può anche essere riscritta come:
1 2 2 V i V B Mdv I ω =
∫∫∫
⋅ (1.25)dove V è la tensione indotta nella bobina dalla magnetizzazione M e 1 I è la corrente che 2 scorre all’interno della bobina e che produce il campo magnetico B . L’equazione (1.25) 2 rappresenta il segnale elaborato nello scanner MRI [1].