3
1.
ARCHITETTURE FCS/FBW PER
ELICOTTERI: STATO DELL’ARTE
1.1
COMANDI DI VOLO SU UN ELICOTTERO
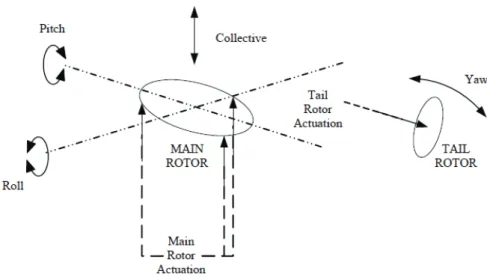
La figura 1.1 mostra la catena di comando di un elicottero. Il pilota di un elicottero dispone dei seguenti comandi:
- Il passo ciclico del rotore principale (Pitch & Roll Cyclic Stick), mediante il quale si varia l’incidenza della pala in maniera ciclica durante un giro
- Il passo collettivo del rotore principale (Collective Stick), mediante il quale si varia l’incidenza di tutte le pale del rotore principale
- Il passo collettivo del rotore di coda (Yaw pedals), mediante il quale si varia l’incidenza di tutte le pale del rotore di coda
4
Su un elicottero le manovre di beccheggio e rollio sono eseguite inclinando il piatto oscillante (swash-plate) del rotore mediante l’utilizzo tre attuatori disposti verticalmente e a 120° rispetto all’asse del rotore. Uno degli attuatori è posizionato nel piano longitudinale in posizione posteriore all’asse rotore, gli altri due sono posizionati davanti, uno a destra e l’altro a sinistra.
Figura 1.2: elementi del rotore principale e principio di funzionamento
5
1.2
SISTEMI DI COMANDO FLY-BY-WIRE
Gli ultimi sessant’anni hanno visto l’evoluzione dei sistemi di controllo di volo per velivolo ad ala rotante, dai primi sistemi meccanici ai moderni sistemi di controllo con Full-Authority Flight Control Computer.
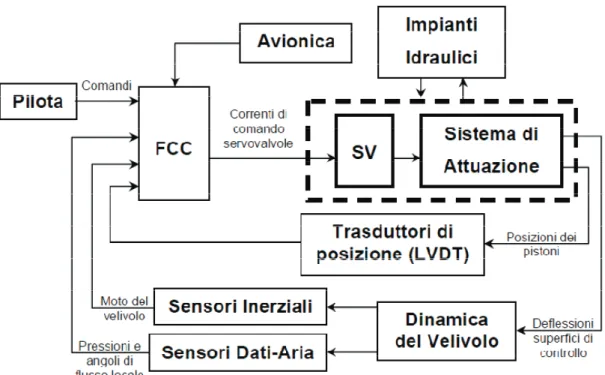
Lo schema di funzionamento di un Flight Control System Fly-By-Wire (FCS/FBW) è rappresentato in figura 1.4.
Figura 1.4: Schema di funzionamento del FCS/FBW
Il Flight Control Computer è il cuore del sistema. Esso acquisisce: - i segnali elettrici relativi ai comandi del pilota
- i dati dei sensori inerziali
- la posizione dei pistoni degli attuatori delle superfici di controllo dai trasduttori - i dati aria dai relativi sensori
L’FCC elabora i segnali acquisiti e invia i comandi alle servovalvole che interfacciandosi con l’impianto idraulico movimentano gli attuatori. L’uso del FBW comporta la totale eliminazione della catena meccanica di comando: il comando, o
6
meglio la richiesta del pilota (demand), è trasformata in un segnale elettrico ed inviata all’ FCC.
I vantaggi della tecnologia FBW sono molteplici: - protezione dallo stallo
- protezione dell’inviluppo di volo (limitazione del fattore di carico misurato da accelerometri)
- variazione automatica dei guadagni di loop - protezione delle manovre errate
- stabilità dell’equilibrio per velivoli aerodinamicamente instabili - riduzione di peso
- riduzione di manutenzione
- riduzione del tempo di addestramento dei piloti
Il sistema di controllo di un elicottero è più complicato di quello per un velivolo ad ala fissa. Vi sono infatti alcune modifiche da apportare al sistema FBW, considerato che le differenze tra un velivolo ad ala fissa ed uno ad ala rotante sono:
- la presenza di notevoli vibrazioni che si propagano lungo tutta la struttura della macchina
- l’accoppiamento della dinamica
- le diverse modalità di avaria dei vari sistemi e sottosistemi.
1.3
ESEMPI APPLICATIVI
1.3.1. Architettura FBW dell’elicottero UH-60M
La Sikorsky Aircraft ha realizzato l’upgrade del FCS/FBW per l’elicottero UH-60M (noto ai più come Black Hawk) per l’esercito americano [3]. L’obiettivo del programma di upgrade è stato quello di implementare un sistema di controllo di volo Full-Authority Fly-By-Wire con segnali di comando elettrici e attuazione idraulica.
7 Figura 1.5: UH-60M
Tutti i controlli meccanici dei comandi primari sono stati quindi sostituiti da sistemi FCS/FBW (incluse le leggi di controllo di volo e gli stick per il comando del passo ciclico e del passo collettivo) e sono stati integrati con la Common Avionics Architecture System (CAAS) dell’elicottero. L’upgrade è stato sviluppato tenendo conto di un’architettura triple-dual, composta da due hardware e software in ciascuno dei tre FCC. I comandi di volo primari, il sistema idraulico e il sistema elettrico sono stati riconfigurati per garantire affidabilità e performance.
8
L’upgrade dell’UH-60M ha condotto ad importanti migliorie in termini di : - peso dei sistemi
- qualità di volo (Handling Qualities) - affidabilità dei sistemi
- tempo di manutenzione
La figura 1.7 mostra lo schema del FCS/FBW per l’UH-60. Il progetto dell’architettura di sistema è di tipo fail-safe, poiché mantiene i controlli meccanici ed il sistema di aumento di stabilità (SAS) dell’UH-60M come sistema di back-up. La sicurezza in volo è garantita attraverso procedure operazionali (limite dell’inviluppo di volo), da un doppio sistema di monitoring ridondante per gli attuatori (Servo Control Unit) e da un sistema di trasferimento dei segnali analogici molto affidabile.
Figura 1.7: Schema FCS/FBW sull’UH-60M, [3]
Il cuore del sistema di controllo è costituito dall’FCC e dal Servo Control Unit (SCU).
9
L’FCC è un computer a 32 bit, con un processore per le leggi di controllo ad elevate performance (6MFLOPS/24MIPS) e con quattro processori input-output per fornire segnali analogici, discreti e digitali I/O.
L’SCU riceve i comandi dall’FCC, elabora i segnali, implementa un controllo in ciclo chiuso e monitora i servocomandi. L’SCU include infatti una serie di monitor che controllano la validità del comando dall’FCC, monitorano le risposte dei servocomandi e staccano il sistema se determinate soglie sono oltrepassate. L’SCU è composta da due sottosistemi ed è possibile eseguire operazioni di cross-lane monitoring. L’architettura duale della SCU e la relativa stabilità del software sono importanti fattori per mantenere alti livelli di safety del sistema con architetture FCC.
Figura 1.8: Cuore del sistema sull’UH-60M, [3]
Il sistema di comando dell’elicottero è costituito da uno stick per il passo ciclico ed uno per il passo collettivo per il rotore principale ed una pedaliera per il rotore di coda. I
10
comandi per il rotore principale sono dotati di un sistema force-feel che restituisce al pilota importanti informazioni sullo stato del velivolo e sui limiti di controllo. Il complesso del sistema di comando costituisce l’Active Inceptor Systems (AIS). Esso è anche costituito dalle unità di guida sui comandi e dall’Inceptor Control Module (ICM). L’ICM è un modulo di controllo di comando che comunica direttamente con le unità di guida per chiudere il loop di controllo di force-feel. L’ICM è sotto il controllo dell’FCC, dal quale riceve i segnali per elaborare le forze da esercitare sul controllo e al quale riporta le informazioni. I comandi di posizione sono letti mediante dei trasduttori di posizione (RVDT).
Figura 1.9: ICM sull’UH-60M, [3]
1.3.2. Architettura FBW dell’elicottero BA 609
Nell’esempio precedente è stata evidenziata l’architettura FCS/FBW di un elicottero, soprattutto in termini di interfaccia con i comandi del pilota e con il sistema avionico. L’implementazione di un sistema FBW su un velivolo richiede inoltre l’integrazione del
11
sistema idraulico di potenza. A tal proposito è stata analizzata l’architettura del BA 609, con relativa implementazione delle ridondanze [4].
Il BA 609 è un convertiplano sviluppato in collaborazione tra Agusta e Bell. Benché le caratteristiche di un convertiplano siano in generale diverse da quelle di un elicottero, il BA 609, offre comunque spunti interessanti per l’applicazione elicotteristica pura.
Figura 1.10: BA 609
Il soddisfacimento dei requisiti di sicurezza imposti dalle normative prevede la presenza di tre impianti idraulici centralizzati. Tali impianti sono progettati in modo da garantire la sicurezza di volo del velivolo e, allo stesso tempo, in modo da non limitare l’inviluppo di volo anche solo con un impianto in funzione.
Come tipicamente realizzato in campo elicotteristico, il sistema che fornisce potenza all’impianto idraulico è alimentato dal rotore principale. Questo aspetto deriva dal fatto che è possibile in tal modo continuare a fornire potenza all’impianto idraulico anche in caso di avaria del motore: la connessione al rotore principale consente infatti
12
l’alimentazione delle pompe anche nel caso di avaria del motore in quanto il rotore viene posto nella condizione di autorotazione dove è in grado sia di alimentare le pompe dell’impianto idraulico sia di sostenere in volo l’elicottero.
Considerando le architetture tipiche di altri velivoli di riferimento (XV-15, V-22), si nota che queste sono basate su due impianti idraulici indipendenti che alimentano l’attuatore con due cilindri. Il terzo attuatore è in modalità di back-up e viene impiegato solo a seguito dell’avaria di uno degli altri due impianti attraverso una valvola di switch (vedi figura 1.11a).
L’architettura del sistema di attuazione del BA 609 è basata invece su tre impianti idraulici paralleli ed indipendenti ed un attuatore con tre cilindri, ognuno dei quali è alimentato dal relativo impianto idraulico e controllato da un relativo hardware (vedi figura 1. 11b). L’architettura è fondamentalmente una sorta di struttura “a grappolo”.
Figura 1.11: Confronto delle architetture possibile del sistema di attuazione, [4]
Alternative Rotor Control
Normal Rotor Control
13
Il vantaggio fondamentale dell’architettura del BA 609 è l’eliminazione della valvola di switch e della ridondanza dell’hardware di controllo sull’unità di trasferimento di potenza.
L’architettura del controllo del sistema idraulico del BA 609 è costituita da: - una servovalvola elettro-idraulica (Electrohydraulic Servovalve, EHSV)
- una valvola solenoide (Solenoid Valve) che controlla una valvola di by-pass (by-pass valve)
- un sensore di pressione differenziale (Differential Pressure Sensor)
- una valvola di pressione bidirezionale (Bidirectional Pressure Relif Valve) - quattro LVDT
In figura 1.12 è riportato uno schema dell’architettura del controllo del sistema idraulico del BA 609.
14
Lo scopo della valvola di by-pass è cortocircuitare l’impianto in caso di avaria. Infatti quando si registra un’avaria viene inviato un segnale alla valvola solenoide che, a sua volta, invia un segnale alla valvola di by-pass che cortocircuita le camere del cilindro. I sensori di pressione differenziale misurano la pressione sui tre cilindri e minimizzano le differenze, evitando così il forzamento di una rispetto alle altre due dovuto ai carichi. La valvola bidirezionale limita la pressione all’interno del cilindro in caso di avaria. Infine i quattro LVDT controllano la posizione dello spool della EHSV, la posizione della valvola di by-pass, la posizione del pistone del cilindro e lo spostamento del sensore di pressione differenziale.
![Figura 1.1 : Sistema di controllo meccanico per un elicottero, [10]](https://thumb-eu.123doks.com/thumbv2/123dokorg/7532482.107213/1.892.225.705.730.1052/figura-sistema-controllo-meccanico-elicottero.webp)
![Figura 1.6 : Schema implementazione FCS/FBW su l’UH-60M, [3]](https://thumb-eu.123doks.com/thumbv2/123dokorg/7532482.107213/5.892.152.790.159.387/figura-schema-implementazione-fcs-fbw-su-uh-m.webp)
![Figura 1.7 : Schema FCS/FBW sull’UH-60M, [3]](https://thumb-eu.123doks.com/thumbv2/123dokorg/7532482.107213/6.892.204.733.532.971/figura-schema-fcs-fbw-sull-uh-m.webp)
![Figura 1.8 : Cuore del sistema sull’UH-60M, [3]](https://thumb-eu.123doks.com/thumbv2/123dokorg/7532482.107213/7.892.257.678.506.1011/figura-cuore-del-sistema-sull-uh-m.webp)
![Figura 1.9 : ICM sull’UH-60M, [3]](https://thumb-eu.123doks.com/thumbv2/123dokorg/7532482.107213/8.892.277.686.470.868/figura-icm-sull-uh-m.webp)

![Figura 1.12 : Schema dell’architettura del controllo del sistema idraulico del BA 609, [4]](https://thumb-eu.123doks.com/thumbv2/123dokorg/7532482.107213/11.892.171.783.571.988/figura-schema-dell-architettura-del-controllo-sistema-idraulico.webp)