Capitolo 1: FACE, verso un robot biomimetico
credibile
1.1 Biomimetica e robots
L’aggettivo “biomimetico” fa riferimento a quei processi, sostanze, apparati, che tendono ad imitare e replicare le funzioni e le forme proprie della natura. La scienza, o, se vogliamo, l’arte, di progettare e costruire sistemi ispirati alla natura è dunque la “biomimetica”.
In svariati campi di ricerca l’approccio biomimetico è sempre più presente: l’architettura, le nanotecnologie, la robotica, l’intelligenza artificiale, l’ingegneria biomedica.
Per fare qualche esempio, alcuni ricercatori per i loro progetti si sono ispirati al mondo animale. L’aliotide, un mollusco con conchiglia in grado di secernere particolari proteine inibenti il processo di calcificazione che potrebbero essere vantaggiosamente usate per evitare lavaggi con costosi solventi tossici. I
mounds costruiti dalle termiti africane sono un esempio di architettura da cui
trarre spunto per costruire edifici a basso impatto ambientale ma efficienti dal punto di vista della climatizzazione. Si stanno costruendo veicoli in grado di operare in ambienti irregolari e di evitare eventuali ostacoli grazie a sistemi di sensori ispirati alla visione degli insetti. Nanorobots, sfruttando questa nuova scienza, potrebbero essere usati come dispositivi per veicolare farmaci o in ausilio agli anticorpi per combattere infezioni e tumori.
Robots che si basano su principi di ingegneria biomimetica differiscono da quelli tradizionali nella loro agilità e capacità di adattamento al mondo esterno.
L’ingegneria di questi robots richiede la comprensione profonda dei sistemi naturali, sia a livello biomeccanico che fisiologico. Ad esempio, gruppi di ricerca hanno realizzato sistemi di locomozione basati su quello delle aragoste, usando un automa a stati finiti, che permette il movimento subacqueo.
Nell’ambito dell’intelligenza artificiale, agenti autonomi digitali, in grado di emulare emozioni umane e con parvenze realistiche, sono sempre più presenti. Possono avere interfaccia testuale o grafica, ma restano comunque legati alla mente vista come un dispositivo logico-razionale in parallelo ad una memoria di dati espliciti. Non riescono, dopo l’impatto iniziale, a mantenere un livello alto di “umanità”, diventando prevedibili e ripetitivi. Lo sviluppo di soggetti artificiali fisicamente presenti non è ancora molto diffuso. Nel mondo fisico, rispetto al mondo digitale, è molto più difficile raggiungere in modo soddisfacente il “senso della realtà”. La Sony ha implementato con il cane robot AIBO un esempio di software emozionale. Il gruppo di Vita Robotica del Media Lab del Massachusetts Institute of Technology (M.I.T.) sta usando una piattaforma sperimentale chiamata Leonardo, robot articolato alto 76 centimetri. L’obiettivo proposto dal MIT è l’interazione sociale di Leonardo con gli umani: è stato dotato di una mimica facciale e di una gestualità, accompagnate dalla capacità di manipolare oggetti. Leo è in grado di analizzare l’espressione di un interlocutore e di attuarne una replica; in pratica è orientato ad imitare l’espressività umana. L’aspetto del robot del MIT è però quello di un usuale personaggio cinematografico. Ciò pone un serio limite alla sua credibilità, nonostante l’architettura cognitiva, affettiva e comportamentale basata sul lavoro di Burke.
Allo scopo di realizzare un volto robotico biomimetico, gli ingegneri Fumio Hara e Hiroshi Kobayashi della Science University di Tokyo hanno cercato una maggiore fedeltà al mondo reale. Il loro robot facciale è simile al volto di una donna. Una complessa architettura sottostante alloggia attuatori pneumatici, sostituiti in un modello più evoluto con attuatori a memoria di forma, che movimentano una pelle in elastomero e consentono la generazione di sei
espressioni differenti. Attraverso una telecamera posta nell’occhio sinistro, questo prototipo è in grado di identificare emozioni umane quali sorpresa, paura, felicità e disgusto. A causa dell’architettura muscolare non biomimetica, i movimenti naturali e la sua credibilità risultano inevitabilmente compromessi.
Appare chiaro che punti fondamentali nella robotica biomimetica sono i materiali e la loro movimentazione, gli input sensoriali ed il controllo, per i quali l’uso di paradigmi biologicamente ispirati sta assumendo un ruolo sempre più importante. I sistemi rigidi si stanno evolvendo verso macchine flessibili ridondanti che, ricoperte da sensori flessibili distribuiti, sono movimentate da attuatori flessibili. Non è però sufficiente evolvere ed assemblare questi blocchi tecnologici per realizzare un vero androide meccanico. Un artefatto biomimetico si pone come interfaccia uomo-macchina che agisce in un ambiente sociale, per questo motivo la sua credibilità e capacità di comunicazione non verbale risultano caratteristiche fondamentali.
Gli studi più recenti nel campo della robotica mettono in evidenza l’importanza dell’ambiente, con tutte le sue variabili, dove agisce l’individuo, non solo la sua “programmazione” genetica. Questa intuizione trova applicazione nella robotica epigenetica, che implica la realizzazione fisica del sistema e la sua interazione prolungata per lo sviluppo successivo alla “nascita”, presupponendo che la programmazione iniziale sia solo un primo indirizzamento. Quindi, non si pretende una programmazione esaustiva del comportamento, ma solo fondamenti che saranno da base per l’apprendimento.
Alcuni ritengono che la presenza di un altro individuo da imitare sia una variabile ambientale molto importante, che induce a sviluppare il senso dell’essere coscienti delle proprie azioni (Nadel 2004 [1]). Esperimenti hanno dimostrato che terapie basate su esercizi imitatori migliorano le capacità imitative, la capacità di capire di essere imitati, la comunicazione non verbale. I soggetti autistici accettano più facilmente di interagire con controparti non umane, perciò l’uso di sistemi robotici come ROBOTA (Nadel 2004 [1]) è mirato a migliorare lo stato di
individui autistici, addestrandoli e portandoli lentamente ad accettare l’interazione con altri esseri umani. Inoltre, è stato visto come i neonati di pochi mesi tendono a imitare la madre che mostra la propria lingua, ma non una semplice bocca artificiale provvista di lingua: da qui la scelta di tentare di replicare, per quanto possibile, le fattezze umane.
1.2 Il progetto FACE
Negli ultimi tempi, l’interesse per la comunicazione non verbale ha fatto convergere discipline come robotica, informatica, neuroscienze, biologia, etc.
Il volto umano è il principale organo con il quale sono comunicate sensazioni e stati d’animo ai nostri simili, e che sono riconosciute in modo pressoché immediato. Molti tentativi sono stati fatti per riprodurre, in modo credibile, la capacità del volto, ma finora con scarsi risultati, focalizzandosi quasi esclusivamente nell’emulazione di espressioni umane virtuali.
Un notevole contributo alla ricerca è venuto dal connubio tra robotica e HCI (Human Computer Interaction), ambito nel quale è acclarata l’importanza delle emozioni trasmesse visivamente nella comunicazione tra uomo e macchina. Sono stati sviluppati sistemi di riconoscimento automatico di alcune più significative espressioni del viso.
In questo ambito si colloca il progetto che negli ultimi cinque anni ha impegnato il Centro di Ricerca Interdipartimentale “E. Piaggio” dell’Università di Pisa: realizzare un volto androide realistico, basato sui principi dell’ingegneria biomimetica, in grado di esprimere emozioni. Il sistema è detto FACE (Facial
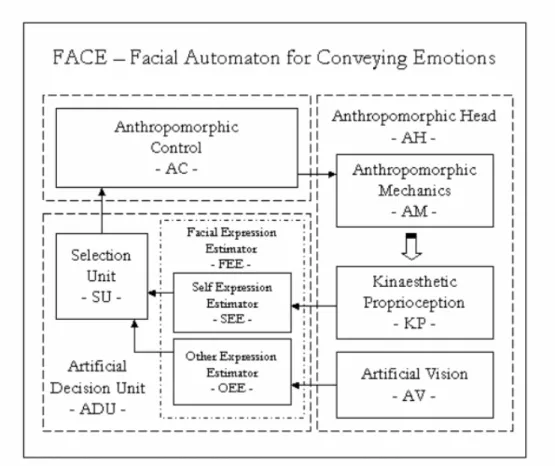
L’androide FACE consiste di un corpo passivo articolato, dotato di una testa antropomorfa. Lo schema funzionale è illustrato in figura 1.1.
Figura 1.1: Schema a blocchi funzionali di FACE
Il sistema è costituito dalla testa artificiale (AH) e da un blocco di rilevamento e riconoscimento delle espressioni facciali (FEE). Un cranio in materiale sintetico è ricoperto da pelle siliconica con sensori e attuatori integrati. Esso riproduce la testa di una persona vera per forma e consistenza con tecniche di life casting. FACE può esprimere e modulare gli stati emotivi fondamentali in maniera ripetibile e adattabile e rilevare le reazioni emotive di un interlocutore. Allo stato attuale, le varie sezioni del progetto sono in via di sviluppo ed una loro integrazione avverrà nei prossimi mesi.
La struttura scheletrica di sostegno è una resina modellata sulla testa di un soggetto umano adulto, realizzata usando tecniche CAD/CAM. I tessuti molli sono fabbricati con materiali impiegati nel mondo dell’animatronica e dell’intrattenimento. Un’architettura muscolare artificiale (AM) sarà inglobata nel tessuto molle e l’intera struttura sarà rivestita da pelle artificiale con integrato un sistema di sensori distribuiti (KP) che ha funzione di retroazione nell’attuazione delle espressioni da parte dell’AM. Gli occhi di FACE saranno realizzati con tecniche di animatronica e la loro espressività è garantita da muscoli artificiali intorno alla regione orbitale. Una videocamera permette a FACE di percepire l’ambiente circostante e acquisire i dati per il riconoscimento dei soggetti che gli si presentano (AV). FACE elabora le espressioni propostegli con un approccio di tipo neurale (OEE). È’ calcolata la curvatura media usando un sistema che permette di rilevare i contorni in tre dimensioni basato sull’analisi delle frange d’interferenza prodotte da un illuminatore. Questa soluzione rende possibile un riconoscimento rapido delle immagini (circa 40ms in condizioni di illuminazione ottimale), ottenendo informazioni sulla forma tridimensionale, sulla curvatura e consistenza di un volto umano non necessariamente immobile.
In FACE sarà implementato uno blocco di controllo non lineare (AC) basato sui lavori di Feldman e sviluppato da De Rossi-Lorussi et al. al Centro Interdipartimentale di Ricerca “E. Piaggio”, che permetterà movimenti più credibili rispetto a quelli degli automi tradizionali.
1.3 Applicazioni del progetto FACE: tool di ausilio per il trattamento dell’autismo
L’autismo è un disordine dello sviluppo caratterizzato da mancanze qualitative nell’interazione sociale e nella comunicazione, e da un ristretto numero di interessi e di attività. È documentato che gli individui autistici hanno carenze nell’interpretare le informazioni di tipo sociale ed emozionale.
Normalmente i neonati prestano interesse sia a stimoli provenienti da soggetti umani che da oggetti inanimati; gli autistici sembrano aver perso questo predisposizione innata. Inoltre, individui autistici usano strategie atipiche per eseguire tali compiti, soffermandosi su parti limitate del volto più che sull’intero. Conseguentemente a queste anomalie, gli autistici hanno gravi difficoltà a comprendere lo stato mentale delle altre persone.
La teoria cognitiva indicata come mindblindness suggerisce che i soggetti autistici hanno difficoltà a concepire le persone come agenti coscienti. La
mindblindness rappresente quindi l’incapacità di percepire la stato mentale di
un’altra persona. Studi recenti hanno mostrato che individui, in particolare quelli con forme gravi di autismo, possono imparare ad affrontare situazioni comuni se sono preparati ai possibili scenari che potrebbero incontrare. Ricordando modi ed espressioni di comportamento appropriate, essi sono in grado di reagire coerentemente. Esistono molti strumenti terapeutici basati sull’uso di fotografie, disegni, video o DVD-ROMs (per esempio Mind Reading, prodotto da Human Emotions, UK). Il loro obiettivo è addestrare i soggetti autistici a capire il comportamento di chi gli sta di fronte e reagire appropriatamente a situazioni che si presentano nella vita quotidiana. Questi metodi mostrano che le emozioni di base possono essere insegnate; il limite di questo tipo di approccio è che esso si fonda sulla presentazione ripetuta di un numero limitato di scenari, quindi
favorisce la risposta mnemonica e non la generalizzazione e l’astrazione dell’esperienza.
Attualmente, i soli robots a scopi terapeutici sono, oltre al già citato ROBOTA, AURORA (AUtonomous RObotic platform as a Remedial tool for
children with Autism) e il Mobile Robotic Toys as Therapeutic Tools for Autism.
In questi progetti, robots mobili sono usati per incoraggiare bambini autistici a interagire “giocando”. Essi, però, sono privi di caratteristiche biomimetiche e capacità espressive.
Il vantaggio nell’usare un automa per la terapia di individui autistici è proprio il presentare un oggetto che non è percepito come un elemento invasivo del loro ambiente, ma piuttosto come parte di esso.
I ricercatori del Centro Piaggio, attraverso FACE, si pongono l’obiettivo di introdurre un trattamento innovativo incentrato sugli aspetti chiave dell’autismo: attenzione sociale e riconoscimento delle emozioni. L’interazione con FACE avrà su un soggetto autistico un forte impatto visivo che gli altri metodi non hanno. FACE sarà un’interfaccia tra paziente e terapista che potrebbe permettere di creare contesti più vari e complessi durante la terapia.. Il terapista avrà la possibilità di usare impostazioni predefinite, oppure potrà sul momento creare nuovi scenari in base alle esigenze che si presentano.