C
C
a
a
p
p
i
i
t
t
o
o
l
l
o
o
I
I
I
I
I
I
L
L
S
S
I
I
S
S
T
T
E
E
M
M
A
A
D
D
I
I
R
R
I
I
L
L
E
E
V
V
A
A
M
M
E
E
N
N
T
T
O
O
I
I
R
R
Il presente capitolo sfrutta i principi di trasmissione del calore per irraggiamento espressi nel capitolo I, per spiegare come una termocamera, corredata dei un opportuno software arrivi all’espressione dello stato di temperatura di un corpo.
Inizialmente vengono introdotti brevemente i sensori all’infrarosso, suddivisi in rilevatori termici e rilevatori fotoelettrici, spiegandone le differenze e come facciano a comporre l’immagine della scena sotto osservazione.
Si espongono le differenze tra la banda Short Wave e Long Wave; con le conseguenze sull’errore di misura dell’una o dell’altra banda adottata dal sensore presente nella termocamera. Viene quindi presentata la termocamera usata nell’esperienza di laboratorio e come questa calcoli la temperatura. Tale valore viene ricavato a partire dalle informazioni ricevute dal sensore e dai parametri impostati dall’utente grazie al software di controllo ed elaborazione. L’utente deve fornire informazioni circa lo stato dell’oggetto e dell’ambiente che lo circonda.
A conclusione viene spiegato come sia possibile risalire al valore di emissività di una porzione di superficie dell’oggetto in osservazione, a partire dalle informazioni fornite dal sensore e dal valore di temperatura che presenta la superficie stessa.
Sensori dell’infrarosso Capitolo II
2.1 Sensori dell’infrarosso
I rivelatori dell’infrarosso si classificano in due categorie principali: i rilevatori termici ed i rilevatori fotoelettrici. I rilevatori termici si basano sulla misurazione del calore generato sull’elemento sensibile dall’assorbimento di radiazione termica. I rilevatori fotoelettrici sfruttano l’eccitazione diretta degli elettroni per produrre un segnale elettrico: gli effetti fotoelettrici più utilizzati sono quelli fotoconduttivi e quelli fotovoltaici. Nel caso dei rilevatori termici gli effetti utilizzati sono quello bolometrico e quello piroelettrico. Un bolometro sfrutta la dipendenza della resistenza elettrica dalla temperatura: la radiazione termica scalda il sensore e misurando la variazione della resistenza si risale alla radiazione incidente. I sensori piroelettrici misurano la variazione della carica di polarizzazione di un materiale ferroelettrico. Tipicamente i rivelatori fotoelettrici a singolo elemento sono più sensibili alla radiazione ed hanno una risposta più veloce rispetto a quelli termici.
Sensori dell’infrarosso Capitolo II
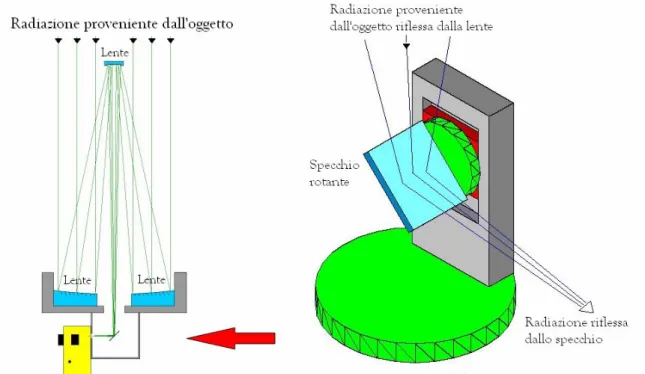
I sensori nei sistemi di rilevamento IR possono essere progettati a singolo elemento, a vettore di elementi oppure a matrice di elementi. Nel caso di elemento singolo o vettore di elementi si ha un sistema a scansione optomeccanica: l’immagine viene scandita sul sensore da un sistema ottico di specchi ruotanti.
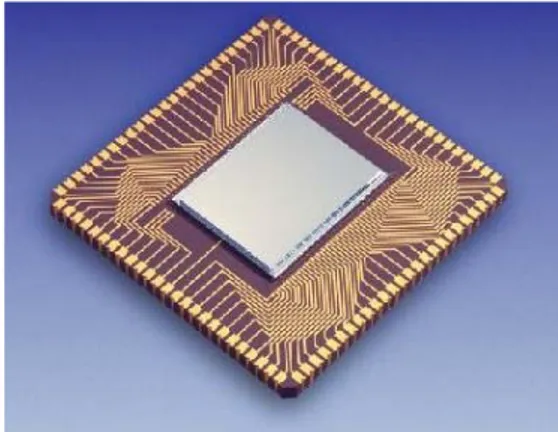
La tecnologia più moderna e ormai predominante prevede una matrice di elementi che crea un piano sul quale viene focalizzata l’immagine da un sistema di lenti fisso e quindi molto più semplice rispetto ai sistemi a scansione.
Figura 2.2 – Sensore a matrice di elementi (FPA)
Tale tecnologia viene denominata FPA (Focal Plane Array) e gli elementi usati per costituire i singoli pixel della matrice possono essere microrivelatori fotoelettrici oppure microrivelatori bolometrici. I sensori piroelettrici vengono utilizzati nei sistemi a scansione optomeccanica. La tecnologia FPA è prevalentemente basata sui rivelatori fotoelettrici mentre recentemente la ricerca ha dato un forte impulso allo sviluppo ed alla produzione di matrici di microbolometri che garantiscano prestazioni simili. I sistemi IR che utilizzano rivelatori fotoelettrici necessitano di un sistema di raffreddamento per mantenere il sensore ad una temperatura operativa che può variare tra 77 °K e 90 °K e ciò può rendere il loro uso più disagevole oltre a incrementarne il costo. Le matrici di microbolometri non hanno invece bisogno di raffreddamento potendo operare a temperatura ambiente.
FPA e bande spettrali Capitolo II
2.2 FPA e bande spettrali
Non tutta la superficie della matrice focale è sensibile all’energia IR: intorno ad ogni singolo rilevatore, il quale costituisce un pixel nell’immagine finale, si estende un’area inattiva. Tale area può essere utilizzata per l’elettronica di supporto. Il rapporto tra la superficie totale di materiale sensibile e la superficie inattiva viene chiamato fill factor (fattore di riempimento). Valori maggiori del fill factor indicano che una superficie maggiore della FPA è dedicata al rilevamento della radiazione per cui le termocamere con elevato fill factor tipicamente presentano una migliore sensibilità e ed una migliore qualità dell’immagine. L’elettronica necessaria deve leggere il segnale di ogni pixel ed elaborarlo per produrre l’immagine.
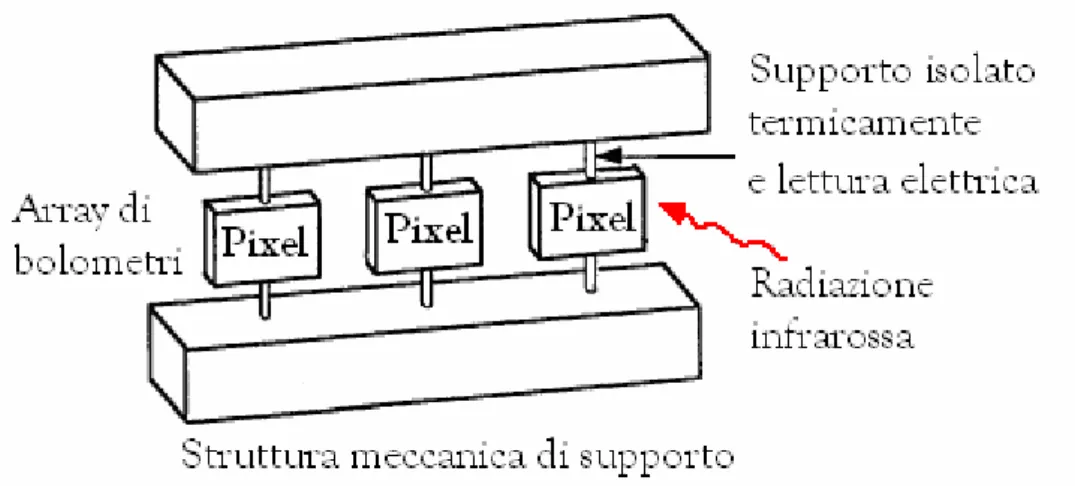
La figura 2.3 mostra una schematizzazione della geometria di una matrice di microbolometri.
Figura 2.3 Rappresentazione schematica di un array di microbolometri
La banda spettrale a cui è sensibile la termocamera dipende dal materiale di cui sono fatti i microrivelatori. Nel caso di matrici di microbolometri la termocamera opera sempre nel campo della intera long wave band (LW), indipendentemente dal materiale di cui è fatto il singolo detector.
Short Wave e Long Wave Capitolo II
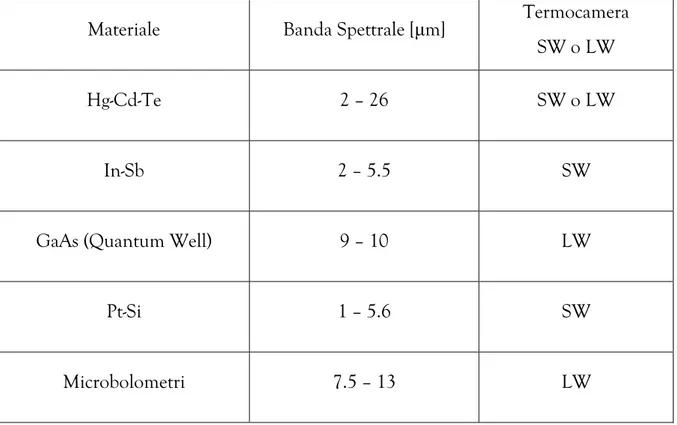
Nel caso di matrici di rivelatori fotoelettrici si possono avere sistemi SW oppure LW. Nella tabella sono riportati i materiali con cui si costruiscono i rivelatori fotoelettrici e le loro bande di lavoro. Sono indicati gli interi intervalli di sensibilità dei materiali, ma attraverso i processi costruttivi è possibile ridurre la risposta spettrale in modo da avere la desiderata banda passante.
Materiale Banda Spettrale [μm] Termocamera SW o LW
Hg-Cd-Te 2 – 26 SW o LW
In-Sb 2 – 5.5 SW
GaAs (Quantum Well) 9 – 10 LW
Pt-Si 1 – 5.6 SW
Microbolometri 7.5 – 13 LW
Figura 2.4 – Materiali fotoelettrici e bande spettrali di lavoro
2.2.1 Short Wave e Long Wave
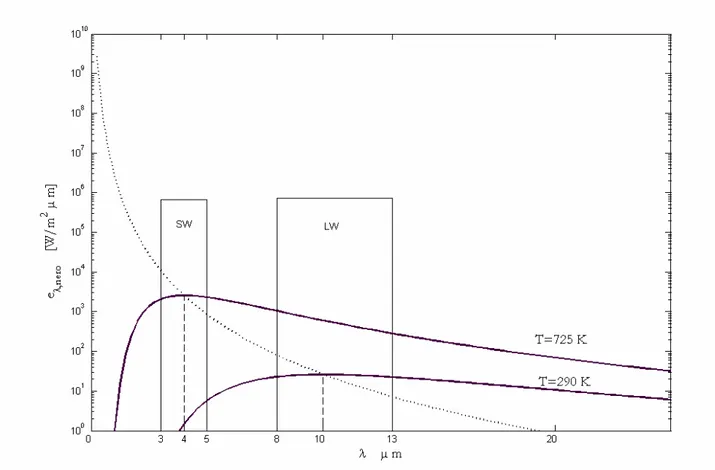
Attraverso la legge dello spostamento di Wien è possibile chiarire le differenze tra i due tipi di sistemi. Il picco del potere emissivo monocromatico del corpo nero cade all’interno della banda 3-5 μm per le temperature da 305 °C a 690 °C, mentre si ha il picco nella long wave band (8-13 μm) per temperature da -50 °C a 90 °C.
Short Wave e Long Wave Capitolo II
I sistemi SW sono pertanto utilizzati tipicamente in applicazioni di medie-alte temperature (fino a 2000 °C) mentre i sistemi LW sono più adatti per applicazioni general purpose a basse temperature.
Figura 2.5 – Potere emissivo monocromatico del corpo nero nelle bande SW e LW
Osservando la figura 1.25 è possibile notare come l’attenuazione dovuta alla trasmissione nell’atmosfera sia in media maggiore nella banda 3-5 μm rispetto alla banda LW. Questo fenomeno rende la distanza dell’oggetto dalla termocamera un parametro più significativo nella misura della radiazione per i sistemi SW: per distanze maggiori di 3 metri la termocamera SW deve compensare maggiormente per l’attenuazione atmosferica. Ciò rende le termocamere LW più adatte per misurazioni all’aperto insieme al fatto che nella banda LW le riflessioni della radiazione termica solare hanno un effetto praticamente trascurabile. L’alta temperatura del sole, il quale può considerarsi un corpo nero, comporta una emissione il cui picco cade nel visibile: nella banda SW la radiazione solare possiede una componente significativa
Short Wave e Long Wave Capitolo II
che interferisce con le misurazioni all’aperto riflettendosi sugli oggetti bersaglio e generando dei punti caldi apparenti nelle immagini IR.
Altri vantaggi dei sistemi LW sono la più ampia banda spettrale e comprensibilmente la maggior sensibilità alle radiazioni termiche a basse temperature, tra cui le temperature vicine a quella ambiente. Questo permette di ottenere misurazioni di temperatura più precise con le termocamere LW.
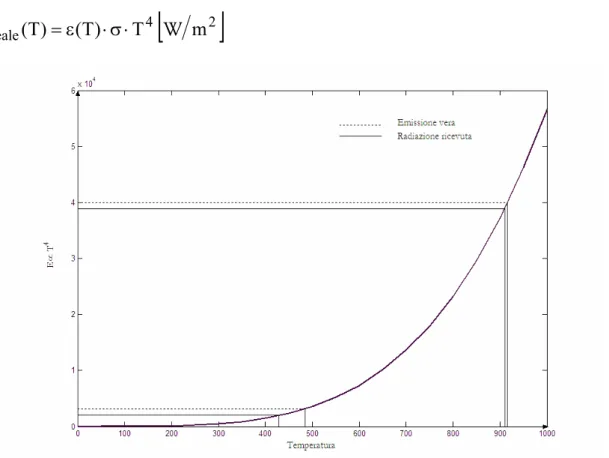
La sensibilità alle basse radiazioni comporta però anche alcuni svantaggi: la relazione attraverso cui la termocamera ricava la temperatura dalla radiazione ricevuta è inserita nelle tabelle interne durante la calibrazione ed è legata alla legge di Stefan-Boltzman, oltre a dipendere da parametri modellabili dall’operatore. La figura 2.6 mostra come un errore, anche piccolo, di uguale entità tra la radiazione vera dell’oggetto e quella interpretata dalla termocamera come proveniente dall’oggetto porti ad un errore nella temperatura molto più ampio se si opera a basse temperature.
[
2]
4reale(T) (T) T m
E =ε ⋅σ⋅ W (1)
Fattori di compensazione e taratura Capitolo II
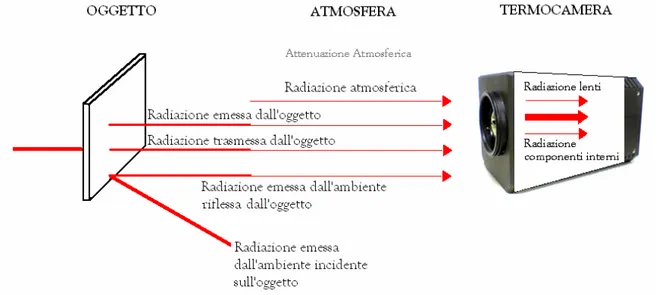
Questo implica come la modellizzazione di tutti i parametri che influenzano l’emissione dell’oggetto sia molto più critica nei sistemi LW. Tali fattori tipicamente sono: l’emissività dell’oggetto, radiazione di fondo (totale dell’energia proveniente dell’ambiente circostante che si riflette sull’ oggetto nel campo di vista della termocamera), deviazione della trasmissione atmosferica rispetto al modello interno, radiazione proveniente dall’esterno del campo visuale (Field Of View), radiazione emessa dalle lenti e dai componenti interni della termocamera.
I sistemi SW sono molto meno influenzati da questi fattori anche per il fatto che la radiazione di sfondo (dell’ambiente) e quella dei componenti interni è propria di temperature prossime a quella atmosferica, per cui l’entità di queste emissioni è irrilevante rispetto a quella presente in applicazioni con alte temperature. In effetti in molti casi non è richiesta la correzione per la radiazione di fondo in applicazioni SW, mentre per i sistemi LW risulta di fondamentale importanza.
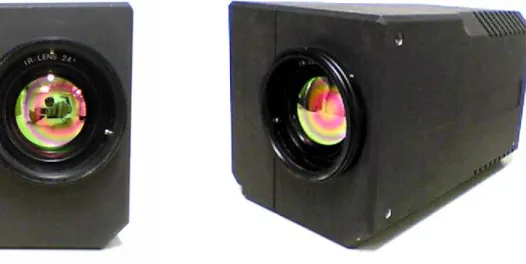
2.3 Descrizione della termocamera
Per l’esperimento descritto nel capitolo IV è stata utilizzata la termocamera ThermaCAM® SC 500 della FLIR Systems™. Trattasi di una termocamera Long Wave con una matrice focale di microbolometri. La camera è collegata ad un componente detto Parallel Interface il quale è a sua volta collegato all’alimentatore e possiede due connessioni verso il PC (con software LabVIEW™ su piattaforma Microsoft™ Windows Xp): un collegamento con una periferica PCI installata detta Frame Grabber ed un collegamento tramite interfaccia seriale. Attraverso la connessione col Frame Grabber la Parallel Interface invia verso il PC, in tempo reale, le immagini dalla termocamera. Le immagini hanno una profondità di 14 bit ed una frequenza di aggiornamento di 50 HZ. Il Frame Grabber cattura le immagini e le passa al software in dotazione, il quale svolge la funzione di presentazione ed analisi
Fattori di compensazione e taratura Capitolo II
delle immagini. Il programma comunica inoltre informazioni con la termocamera attraverso l’interfaccia seriale.
La FPA è di 320x240 pixel e le dimensioni sono 2 cm x 1.5 cm. La banda spettrale di ricettività è 7,5--13μm e si raggiunge una sensibilità termica di 0,1 °C
Figura 2.7 – ThermaCAM SC 500, FLIR Systems
2.4 Fattori di compensazione e taratura
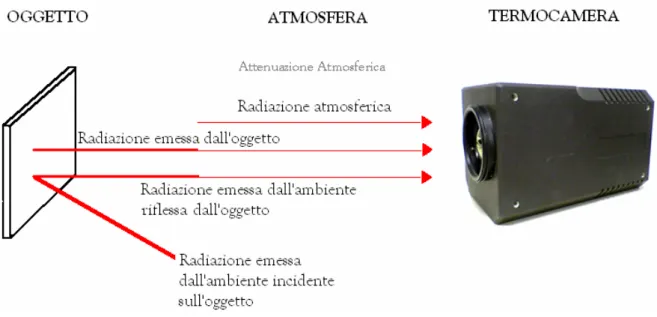
La figura 2.8 mostra quali radiazioni principali incidano sul detector. La termocamera possiede sensori interni e modelli intrinseci attraverso i quali compensa queste componenti. Un fattore di autotaratura ha la funzione di aggiornare le tabelle interne delle risposte dei vari pixel: è necessario considerare la non uniformità nella risposta dei pixel della FPA. Per ogni pixel infatti esiste una tabella di corrispondenza attraverso la quale la telecamera stabilisce la temperatura. La termocamera provvede alla correzione della non uniformità autonomamente.
È importante tenere presente che non è solo il software a convertire in temperatura le informazioni sulla radiazione termica dell’oggetto, nonostante molti parametri necessari alla conversione vengano inseriti attraverso il software. Il programma,
Fattori di compensazione e taratura Capitolo II
infatti, invia i dati occorrenti alla termocamera la quale può risale alla radiazione di corpo nero media nella banda spettrale di funzionamento ed infine alla temperatura.
Figura 2.8 – Componenti principali della radiazione incidente la termocamera
Il software è infatti compatibile con diversi tipi di termocamere, ed anche nel caso di termocamere dello stesso tipo i dati di calibrazione non sarebbero coincidenti. La calibrazione viene effettuata testando la termocamera con un insieme di corpi neri a diverse temperature: le informazioni memorizzate riguardano la corrispondenza tra radiazione di corpo nero percepita dal sensore e la temperatura corrispondente (figura 2.9).
Schematizzazione del calcolo della temperatura Capitolo II
La figura 2.8 mostra inoltre due fattori di natura esterna che la termocamera deve bilanciare: l’attenuazione atmosferica e la radiazione dello sfondo (denominata in figura Radiazione atmosferica). Nel software è possibile inserire i parametri che influenzano la trasmissività atmosferica quali la distanza dell’oggetto, la temperatura atmosferica e l’umidità relativa dell’aria. Attraverso questi parametri il software stima la trasmissività media dell’atmosfera nel campo spettrale della termocamera ed invia questo dato alla termocamera.
Anche la radiazione dell’ambiente circostante che incide sull’oggetto è un parametro necessario alla termocamera per risalire alla temperatura. Il fenomeno è modellizzato attraverso una variabile impostabile via software che richiede l’immissione di una temperatura detta temperatura ambiente ( ). Tale parametro corrisponde alla temperatura per la quale un corpo nero irraggerebbe una energia pari a quella che incide sull’oggetto. Le tecniche per stimare la verranno descritte successivamente.
ambiente
T
ambiente
T
2.5 Schematizzazione del calcolo della temperatura
La figura 2.10 mostra un modello più accurato di quello della figura 2.8 rispetto ai possibili contributi per la radiazione incidente sul detector.Sono infatti prese in considerazione la possibile trasmissività dell’oggetto, la radiazione emessa dalle lenti e la radiazione emessa dai componenti interni alla termocamera. Il sistema software-termocamera non dispone di strumenti per trattare matematicamente l’energia trasmessa dall’oggetto. L’osservazione di oggetti trasparenti all’IR è molto difficoltosa se non impossibile. Un approccio consiste nell’utilizzo di filtri spettrali che riducano la banda di lavoro ad un intervallo della LW in cui l’oggetto risulti opaco.
Schematizzazione del calcolo della temperatura Capitolo II
Figura 2.10 – Contributi delle radiazioni incidenti sul detector
Il modello interno tiene conto oltre che della attenuazione atmosferica, dovuta all’assorbimento, anche dell’emissione propria dell’aria, attraverso la variabile
. Tale emissione risulta irrilevante per aria a temperature normali, mentre può essere significativa per temperature molto elevate. Spesso quindi si approssima: ; dove a venir stimato è il parametro per il suo maggior effetto sulla misura. Nel caso in cui nell’ambiente circostante siano presenti oggetti a temperature maggiori di quella propria della scena inquadrata e di quella atmosferica e nei casi in cui l’aria è a temperatura elevata, l’approssimazione può produrre errori di misura ed occorre quindi differenziare tra e
. atmosfera T atmosfera ambiente T T = Tambiente ambiente T atmosfera T
Dalla figura 2.10 si può concludere, considerando τ=01, che l’energia ricevuta dalla termocamera sia: atm amb nero , obj cam W W W W =ε⋅ +ρ⋅ + (2)
1 Ipotizzare τ=0 significa ipotizzare che il corpo sia perfettamente opaco, cioè che tutta la radiazione incidente sul corpo stessa venga ripartita tra quella riflessa e quella assorbita.
Schematizzazione del calcolo della temperatura Capitolo II
• : tiene conto sia dell’attenuazione che della emissione atmosferica nella banda 7,5-13 micron. Data la maggior influenza del fattore di attenuazione generalmente si ha <0.
atm
W
atm
W
• : rappresenta l’energia proveniente dall’ambiente circostante ed incidente sull’oggetto, mentre il termine.
amb
W
• : è l’emissione propria della superficie come emissività per radiazione di corpo nero.
nero , obj
W
Tutti questi termini sono caratteristici della banda 7,5-13 micron.
Anche l’emissività e il coefficiente di riflessione ε ρ, sono da considerarsi valori medi all’interno della banda LW.
Una parte della Wamb viene assorbita, per cui si ha:
1 = ρ +
α (3)
A questo punto viene introdotta un’approssimazione dalla termocamera, che consiste nell’applicazione del principio di Kirchhoff ai parametri medi ε ed α nella banda LW:
ε − = ρ ⇒ ε = α 1 (4) Quindi si ottiene: ε − ⋅ ε − −
= cam amb atm nero , obj W W ) 1 ( W W (5)
Dal valore di ottenuto, la termocamera risale alla temperatura attraverso le tabelle interne.
nero , obj
FOV, IFOV e modulazione Capitolo II
2.6 FOV, IFOV e modulazione
La termocamera possiede un campo visuale predefinito di 24° x 18°, con distanza focale minima 0,3 m. Un insieme di lenti interne permettono diversi FOV (Field Of View) e distanza minima: l’identificazione della lente è automatica.
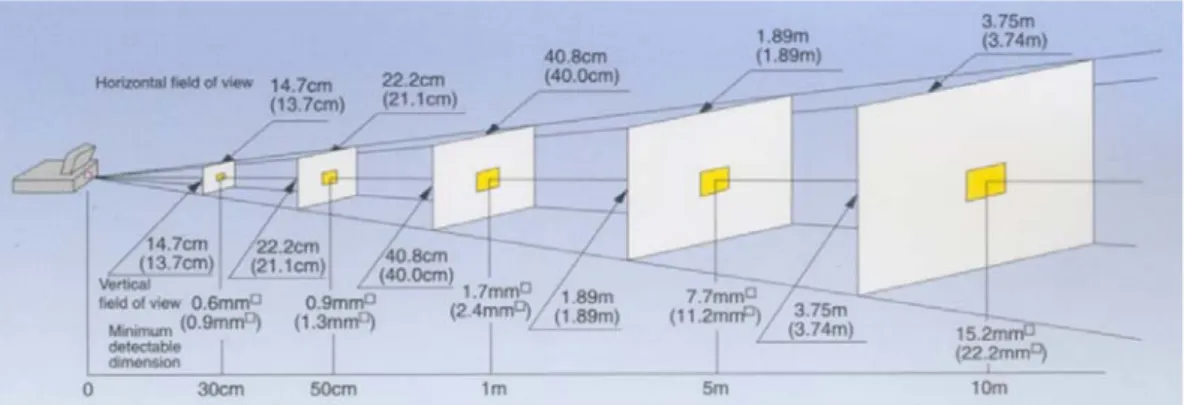
Sono preferibili misurazioni in cui l’oggetto bersaglio riempie interamente il campo focale. Idealmente la temperatura misurata non dovrebbe dipendere dalla dimensione dell’oggetto. In realtà osservando oggetti che non coprono tutta l’area della FPA, viene misurata una media tra la temperatura dell’oggetto e quella dello sfondo. Il peso della temperatura dell’oggetto su questa media viene chiamato modulazione. Una modulazione del 50% è adatta a specificare la più piccola dimensione che si riesce a discriminare: la risoluzione geometrica o spaziale (IFOV: Istantaneous Field Of View). In generale per avere una buona visione è necessario che l’oggetto copra almeno l’area di un pixel. Con l’ottica integrata si ha un IFOV di 1,3mmrad (il sensore apprezza un area di 1,3mm x 1,3 mm alla distanza di 1 m).Tuttavia un modulazione del 50% comporta errori di misura inaccettabili. È preferibile avere una modulazione tra il 90% ed il 100%. Con la termocamera considerata per avere una misura corretta è necessario che l’immagine dell’oggetto copra un area della FPA maggiore di una matrice di 3x3 pixel.
Figura 2.11 – Area minima apprezzabile al variare della distanza della termocamera dall’oggetto (IFOV)
Il calcolo dell’emissività Capitolo II
Nel software la dimensione dello spot, lo strumento che riporta la temperatura di un punto dell’immagine, è proprio una matrice di 3x3 pixel: il programma opera una media delle temperature dei nove pixel riportate dalla termocamera.
2.7 Il calcolo dell’emissività
Come visto al paragrafo 2.5, le termocamere leggendo il valore dell’energia incidente sul sensore, sono in grado, avendo a disposizione l’emissività della superficie dell’oggetto inquadrato, di convertire tale valore in temperatura. Ovviamente occorre impostare un corretto valore di emissività per ottenere una corretta stima della temperatura.
Si può effettuare però, anche l’operazione inversa; è possibile infatti, grazie alla formula (5), risalire al corretto valore di emissività, partendo dalla quantità di energia incidente sul sensore, e dal valore di “temperatura reale” dell’oggetto in osservazione. In particole si è visto come una termocamera riesca a comporre un’immagine bidimensionale formata da pixel i cui valori rappresentano i valori di energia riflessi dalla scena inquadrata, considerando tutti i fattori di disturbo e compensazione. Tutta l’immagine in questione non sempre presenta un’emissività uniforme; anzi è consueto il caso di emissività notevolmente differenti per zone diverse dell’immagine. Con l’ausilio dei programmi di gestione delle termocamere2, è possibile analizzare le immagini anche puntualmente dopo averle visualizzate; questo permette di misurare la temperatura di ogni suo punto, in accordo con la risoluzione geometrica (IFOV) prima accennata, impostando un corretto valore di emissività.
Se però non si è in grado di fornire un valore di emissività certo per quel punto, bensì si ha disposizione il suo valore in temperatura, allora grazie a questo (ed
Il calcolo dell’emissività Capitolo II
ovviamente al valore dell’energia riflessa dall’oggetto rilevata dal sensore), si è in grado di calcolare il valore della sua emissività.
Quindi calcolare l’emissività della superficie di un oggetto, esige avere a disposizione la sua temperatura. Questa può essere misurata in due modi: o per contatto grazie ad un qualsiasi sensore di temperatura (termometri, termocoppie etc..); oppure si può stimare direttamente grazie alla termocamera, se si ha a disposizione all’interno dell’immagine, una zona adiacente a quella oggetto di studio, della quale si conosca in maniera precisa il valore di emissività. Grazie a questo, si può calcolare il suo valore esatto di temperatura ed usare quest’ultimo come riferimento per la zona in questione.
Come valore di riferimento dell’emissività si usano speciali marcatori in materiali plastici ad emissività costante; o si applica un sottile strato di vernici opache, appositamente studiante affinché mantengano emissività costante.
Figura 2.12 – Marcatori in materiali plastici, ad emissività costante.
Una tecnica per valutare consiste nel ruotare la telecamera di 180° rispetto alla direzione di osservazione e considerare la temperatura media dell’immagine con l’emissività impostata ad uno. Un’altra tecnica si basa sulla misura della temperatura media di un foglio accartocciato di carta riflettente (stagnola) posto dinnanzi all’oggetto e con uguali dimensioni, sempre con
ambiente
T