Capitolo 1
Introduzione
1.1 Obiettivi della tesi
L’obiettivo di questa tesi riguarda lo studio aerodinamico con metodologia C.F.D. (Fluidodinamica Computazionale) di alcune configurazioni del veicolo ET2, realizzato dalla Facoltà di Ingegneria dell’Università di Pisa che partecipa alla Formula SAE, per la determinazione e la valutazione delle forze aerodinamiche; in particolare sono state prese in considerazione due tipologie di vettura per quanto riguarda le carenature, quali:
- 1 configurazione della monoposto con muso anteriore, pance laterali copri radiatori e fondo piatto;
- 2 configurazione della monoposto con muso anteriore, pance laterali copri radiatori e fondo piatto con due profili estrattori laterali vicini alle ruote posteriori;
Una volta ricreate le carene tramite modellatore solido sono state fatte le simulazioni e sono stati confrontati i risultati ottenuti per vedere quale delle due configurazioni risultasse essere la migliore per quanto concerne la riduzione dei coefficienti di resistenza e portanza. Nella parte iniziale del lavoro sono stati creati quindi tutti i modelli C.A.D. delle carene, specificate pocanzi, tramite l’utilizzo del software SolidWorks®, da inserire nel modello
del veicolo completo.
Il problema fondamentale è stato quello di creare una geometria che, tenendo conto del regolamento imposto dalla S.A.E. per la parte aerodinamica, fosse un buon compromesso tra l’estetica, nella ricerca di una linea piacevole e aggressiva, e quella che è la parte più strettamente funzionale, in particolare le pance laterali che coprono i radiatori. La parte più complessa da realizzare è stata comunque il muso anteriore; le difficoltà sono sopraggiunte in particolar modo nel creare una forma per adattarlo al telaio cercando di coprire tutti i vari componenti alloggiati (sospensioni, barra antirollio) che potessero dare disturbo al flusso dell’aria in quella zona, cosa che invece avveniva nel modello precedente, la ET1. L’esigenza maggiore, di fondamentale importanza, era comunque quella di favorire nel miglior modo possibile l’efflusso del maggior quantitativo d’aria ai radiatori, e quindi
garantire un migliore raffreddamento dei fluido refrigerante del motore. Per ciò che riguarda quindi le pance laterali copri radiatori, oltre a ricercare anche in queste una sagoma esteticamente gradevole, la maggior parte del tempo è stata spesa per cercare di adattarle alla parte centrale del telaio seguendone le varie curvature. Per i fondi piatti non si sono incontrate particolari difficoltà nell’esecuzione dei modelli se non quelle di rispettare ingombri, spessori e raggi di curvatura specificati nel regolamento. Tutti i problemi sopra elencati sono nati dal fatto che è stato deciso di mantenere il vecchio telaio della ET1, pur con qualche piccola modifica, anche per la vettura di quest’anno. Lo scorso anno non sono state fatte simulazioni riguardanti l’aerodinamica e le carene sono state disegnate e create solo per migliorare l’estetica della vettura. Questa esperienza ci ha fatto capire che per gli sviluppi futuri sarà necessaria una continua collaborazione fin dall’inizio tra i telaisti e gli aerodinamici. Il lavoro successivo è stato quello di “ripulire” i modelli completi delle due vetture da tutti gli elementi superficiali che non erano significativi ai fini della simulazione, in particolar
modo nella parte posteriore.
Una volta completate le due configurazioni, queste sono state importate nel codice di calcolo STAR-CCM®, dove è stata creata dapprima la griglia di calcolo superficiale su tutti i modelli di monoposto. Successivamente per sono state inserite nel volume di controllo, cioè lo spazio fisico che rappresenta il dominio di calcolo fluido, e quindi è stata creata la griglia volumetrica; dopodiché, dopo aver impostato tutte le condizioni necessarie (modelli matematici, condizioni iniziali ed al contorno, metodo numerico di soluzione, proprietà del fluido ed altro) sono state eseguite le simulazioni. Fatte quest’ultime si sono analizzati i risultati ottenuti, attraverso l’ausilio di numeri, grafici e diagrammi, ed infine sono state fatte le opportune valutazioni sulla bontà delle soluzioni terminando il lavoro.
1.2 Formula S.A.E.
La Formula S.A.E. è una competizione universitaria organizzata dalla S.A.E. (Society of Automotive Engineers) in collaborazione con l’ImechE (Institution of Mechanical Engineers). I partecipanti, composti da soli studenti (o laureati da non più di sette mesi), sono tenuti a progettare e a realizzare una piccola monoposto a ruote scoperte e ad abitacolo aperto, soggetta a particolari regolamenti (Fig. 1).
In qu vettu camp previ − For − For − For − For − For − For − For − For − For La co • Cla totalm uesta compe ure in differ pionati disp iste 9 comp rmula SAE rmula SAE rmula SAE rmula SAE rmula SAE rmula SAE rmula Stude rmula Stude rmula Stude ompetizione asse 1: part mente nuov Figura 1 etizione ven renti condiz putati in var petizioni: in Michigan West, in Ca in Virginia, Australasia Brasil (orga Italy (organ ent, Regno U ent Germany ent Russia, a e è suddivis ecipazione va; 1.1 ‐ Vettura ngono valut zioni. Oggi rie parti de n, USA alifornia, US , USA a, in Austral anizzata da nizzata da A Unito (organ y, ad Hocke a Mosca sa per classi agli eventi Formula SA tati sia la va si contano el mondo. In SA lia (organizz SAE Brasil ATA) nizzata da I enheim i di partecip statici e ag AE dell'Unive alidità dei p più di 140 n particolar zata da SAE l) IMechE) pazione:
gli eventi din
ersità di Pisa
progetti che università re, per l’an
E Australasi namici utili le prestazio che concor nno 2009 so ia) izzando una oni delle rrono nei ono state a vettura
• Classe 1 (200): partecipazione agli eventi statici e agli eventi dinamici utilizzando la vettura dell’anno precedente;
• Classe 1 (A): partecipazione agli eventi statici e agli eventi dinamici utilizzando una vettura totalmente nuova e con ridotta emissione di CO2;
• Classe 2: partecipazione ai soli eventi statici presentando il telaio della vettura che parteciperà in classe 1 l’anno successivo;
• Classe 3: partecipazione ai soli eventi statici, non essendo ancora stata realizzata la vettura.
• Classe 3 (A): partecipazione ai soli eventi statici, non essendo ancora stata realizzata la vettura, l’alimentazione è con carburanti alternativi.
Questo tipo di suddivisione è stata pensata per favorire i team debuttanti, consentendo loro di poter realizzare la monoposto in un arco di tre anni. Per quanto concerne il regolamento, sono previste delle particolari restrizioni per i motori utilizzabili. In particolare questi devono essere dei quattro tempi di massimo 610cc e con una strozzatura posta nel condotto d’aspirazione di apertura pari a 20mm. Particolarmente severe inoltre sono le regole relative alla sicurezza. Sono infatti imposte zone deformabili per assorbire gli urti, strutture particolari di protezione nel telaio, sistemi inerziali, interruttori di emergenza, roll bar, ecc. Inoltre le monoposto, prima di essere ammesse alle
prove su pista, sono tenute a superare una lunga serie di controlli. Le vetture sono giudicate in una serie di prove statiche e dinamiche;
le prime hanno lo scopo di verificare la bontà del progetto realizzato, le seconde di mettere a confronto i mezzi presentati dalle varie università, sia dal punto di vista prestazionale che affidabilistico.
• Eventi statici:
• Tech & Safety:
– ispezione visiva da parte dei giudici;
– prova di fuoriuscita del pilota dall’abitacolo in un tempo inferiore ai 5 secondi; – prova dell’interruttore generale: verifica che disabiliti tutto l’impianto elettrico.
• Tilt Test:
– prova di ribaltamento per testare la perdita di liquidi;
• NoiseTest:
– prova di rumorosità allo scarico, verifica che la pressione sonora non superi i 110 dB;
• Brake Test:
– prova di frenata, che prevede il bloccaggio contemporaneo di tutte e quattro le ruote;
• Design:
In questa fase vengono presentate le scelte progettuali illustrando i pregi delle soluzioni adottate e le innovazioni presenti sulla vettura; si descrivono telaio, motore, sospensioni, gli studi aerodinamici svolti, le analisi dinamiche, le verifiche di resistenza statica e a fatica, senza trascurare la presentazione del team di studenti che ha sviluppato il progetto; viene attribuito un punteggio sulla base delle soluzioni tecniche adottate, premiando quelle più innovative, ma al tempo stesso affidabili e semplici da realizzare.
• Cost Report:
Nell’analisi dei costi vengono comunicate e giustificate le spese sostenute per la realizzazione della vettura. Deve essere presentata una distinta base dei componenti del veicolo. Il costo totale non deve superare i 25000 $.
• Presentation:
Consiste in una presentazione della vettura ad un ”Consiglio” che ha il potere decisionale sull’investimento ”Formula Student”; il punteggio è attribuito in base agli studi economici di budget, strategia e marketing effettuati.
• Eventi dinamici:
Il regolamento tecnico descrive in maniera dettagliata le prove dinamiche che la vettura deve affrontare. La maggior parte di tali prove si svolgono all’interno di una pista molto tortuosa, in modo tale da avere velocità ridotte (entro i 100 km/h) per aumentare la sicurezza durante la competizione.
• Acceleration:
- prova di accelerazione con partenza da fermo su un rettilineo di 75 m in piano.
• Skid-pad:
- Consiste nell’affrontare un percorso a forma di otto, delimitato da coni e costituito da due circonferenze del diametro di 15,25m con i centri distanti 18,25m. Lo scopo è valutare l’accelerazione laterale sviluppabile.
• Autocross:
- Prova di sprint da eseguire su due giri di circuito per valutare la maneggevolezza della vettura Il circuito è disegnato in modo da ottenere velocità medie comprese tra i 30 ed i 40 km/h e comprende brevi rettilinei (non più di 60m), curve a raggio costante (da 23 a 45 m di diametro), tornanti (9 m di diametro esterno minimo), slaloms (coni a distanza compresa tra 25 e 40 m), chicanes e curve a raggio variabile.
• Endurance:
- Prova di durata sulla distanza di 22 km da eseguire su di un circuito allungato rispetto a quello dell’Autocross.
• Fuel economy:
PUN
La g even segu1.2.1
In qu segui Carr - non princNTEGGI
giuria, secon nto, per un ente figura:1 Regol
uesto parag iti per la co rozzeria: n ci devon cipale. Sono ndo le mod totale di 1lamento p
grafo sono i struzione de no essere a o ammesse p dalità precis 1000 punti. Figura 1.2parte aero
llustrati tut elle carene. aperture att piccole aperate nel rego . I puntegg 2 – Punteggi c
odinamica
tti i punti d traverso la rture vicino olamento, a gi massimi competizionea
el regolame carrozzeri o alle sospen assegna un ottenibili s e ento per la a tra l’abi nsioni anter punteggio p sono elenc parte aerod tacolo e il riori. per ogni ati nella dinamica l rollbar- Sono vietati spigoli vivi sulla parte anteriore della carrozzeria o di altri componenti sporgenti.
- Tutti i bordi sulla carrozzeria anteriore che potrebbero colpire le persone (ad esempio il muso) devono presentare raggi di raccordo di almeno 38 mm (1,5 pollici).
Appendici aerodinamiche:
• Posizione:
Nessuna appendice aerodinamica può essere:
- avanti di 460 mm (18 pollici) rispetto alla parte frontale delle ruote anteriori; - arretrata rispetto alla parte posteriore delle ruote posteriori;
- estesa oltre il bordo esterno delle ruote.
Tutti gli spigoli vivi delle appendici aerodinamiche devono avere un raggio minimo di 12,7 mm (0,5 pollici).
• Restrizioni
Nessuno spigolo con piccolo raggio può essere inserito in alcun punto delle appendici aerodinamiche in modo da violare le precedenti regole (ad esempio generatori di vortice con bordi sottili, spigoli taglienti sul fondo piatto).
Le ali devono essere montate in modo tale che qualsiasi incidente non sia in grado di deformare le stesse o i loro supporti tali da bloccare l'uscita del conducente.
Dispositivi effetto suolo
Nessun dispositivo può essere utilizzato per spostare o eliminare l'aria da sotto il veicolo, ad eccezione di ventole progettate esclusivamente per il raffreddamento.
Capitolo 2
Fondamenti di fluidodinamica computaziona-
le (C.F.D.)
2.1. Introduzione
alla
C.F.D.
La fluidodinamica computazionale o C.F.D. (computational fluid dynamics) è un metodo di calcolo per la simulazione di qualsiasi tipo di flusso mediante il calcolatore, che si basa sull’utilizzo di codici di calcolo specializzati il cui scopo è quello di analizzare sistemi fisici caratterizzati da flussi di massa e di calore, da moti laminari o turbolenti, da reazioni chimiche.
E’ una tecnica di calcolo adottata in molti settori come ad esempio nel settore automobilistico, aeronautico, spaziale, navale e nautico, nell’ambito dello studio delle macchine a fluido (turbomacchine e macchine alternative), nel settore energetico ed altro. Le principali fasi di una simulazione vengono suddivise nel modo seguente:
• pre-processing: caratterizzata dall’utilizzo di un programma per la creazione di un modello geometrico o dall’importazione di quest’ultimo direttamente da un programma C.A.D., dalla definizione del dominio di calcolo, ovvero dello spazio fisico, dove è presente il fluido e dove vengono inseriti i modelli di vettura da testare, e da un generatore della griglia di calcolo (superficiale e di volume);
• settaggio del solutore e simulazione: caratterizzata dall’utilizzo del software di simulazione fluidodinamica (nel nostro caso Star-CCM® versione 3.04) in cui vengono importate la geometria discretizzata e impostate le condizioni di calcolo quali:
– scelta delle equazioni da risolvere (continuità, quantità di moto, energia, moto laminare, moto turbolento ecc…);
– definizione delle proprietà del fluido (material properties); – definizione delle condizioni al contorno (boundary conditions); – scelta del tipo di solutore;
– inizializzazione del problema; – calcolo della soluzione;
– eventuale affinamento della griglia di calcolo o modifiche del modello fisico e numerico. • post-processing: consiste nell’esame della soluzione ottenuta, nell’analisi dei risultati, anche con l’utilizzo di grafici e diagrammi e nella valutazione di eventuali modifiche o sviluppi da apportare al modello.
Lo schema generale di una analisi C.F.D. è il seguente:
Geometria C.A.D. Geometria I.G.E.S. Mesh di superficie Mesh di volume Solutore fluidodinamico
Analisi dei risultati
Validazione del modello
Figura 2.1 Schema generale di un’analisi CFD
I limiti della CFD sono da ricercarsi essenzialmente nella modalità di settaggio dei numerosi parametri di cui il programma dispone per la modellizzazione dei fenomeni quali
Modifica geometria Modifica mesh di superficie Modifica mesh di volume Modifica del modello fisico
la turbolenza o l’irraggiamento, nonché dai limiti sulla potenza di calcolo del calcolatore che limita il numero massimo di celle all’interno del dominio. Ciò può portare ad avere una griglia troppo poco fitta e quindi ad elevati errori.
L’aumento consistente delle potenze di calcolo dei calcolatori moderni ha aumentato il campo di applicazione della CFD a problemi sempre più complessi (ad esempio fenomeni non stazionari o geometrie complesse), per cui il guadagno in termini di potenza e riduzione dei tempi di calcolo, unito alla economicità delle simulazioni, rendono la CFD un mezzo sempre più usato e affidabile in campo industriale.
2.2. Equazioni della fluidodinamica
Tutti i problemi riguardanti la meccanica dei fluidi sono descritti da equazioni differenziali alle derivate parziali, quali le equazioni di conservazione della massa (o di continuità), della quantità di moto e della conservazione dell’energia (quando sono previsti trasferimenti di calore), basate sulle seguenti ipotesi:
• Il fluido è considerato continuo
Il volume è considerato come un insieme continuo di particelle fluide le quali saranno abbastanza piccole rispetto alla scala del problema fisico ma abbastanza grandi da contenere un numero sufficiente di molecole tale da garantire che le fluttuazioni delle proprietà fisiche della particella stessa non abbiano effetto sulla media;
• Il fluido è considerato Newtoniano
Le tensioni tangenziali alle quali è sottoposto il fluido sono legate linearmente alle velocità di deformazione;
• Il fluido è di Fourier
Il flusso di calore è legato linearmente al gradiente di temperatura;
• Il fluido è in equilibrio termodinamico
Localmente tutte le grandezze fisiche di riferimento sono considerate indipendenti dalla posizione e dal tempo. Ciò è vero se i gradienti non sono troppo elevati.
2.2.1.
Equazione di conservazione della massa
Questa equazione scalare, ottenuta facendo un bilancio in un elemento infinitesimo di volume di fluido, tra la massa rimasta nello stesso e quella uscente meno quella entrante, diventa:
0
Nel caso di moto permanente ed incomprimibile del fluido l’equazione si semplifica nel modo seguente:
0
2.2.2.
Equazione di conservazione della quantità di moto
Questa equazione vettoriale (corrispondente a tre equazioni scalari, una per ogni componente scalare del vettore), ottenuta facendo sempre un bilancio in un elemento infinitesimo di volume di fluido, ma questa volta riferita ai flussi di quantità di moto e alle forze agenti sullo stesso, diventa:
·
dove il tensore degli sforzi viscosi, composto da 6 componenti ed essendo simmetrico, è definito nel modo seguente:
2
in cui µ è la viscosità dinamica del fluido e I è la matrice identità. Nel caso in cui il moto del fluido possa essere considerato incomprimibile, la densità non varia nello spazio né rispetto al tempo, per cui il tensore degli sforzi viscosi si semplifica così:
per cui andando a sostituire nell’ equazione del moto, questa diventa:
·
alla quale corrispondono tre equazioni scalari rispetto alle componenti di una terna di riferimento cartesiana:
Queste equazioni sono meglio note come equazioni di Navier-Stokes per fluidi incomprimibili. Molto spesso le forze di tipo gravitazionale sono di modesta intensità, per cui in molte applicazioni non vengono considerate.
2.2.3.
Equazione di conservazione dell’energia
Se durante il moto il fluido subisce variazioni di densità tali da dare anche variazioni di temperatura consistenti per cui si hanno le condizione di fluido comprimibile, alle equazioni sopra citate si deve aggiungere un’altra equazione (sempre di tipo scalare) di conservazione dell’energia, per poter considerare nel bilancio anche gli scambi di calore; la forma di tale equazione è:
· ∑ ·
composta dai seguenti termini:
– al primo membro abbiamo il termine instazionario , dipendente dal tempo, più il
termine convettivo · , dove ( ) è dato dalla somma dell’energia
interna per unità di massa ( ) più l’energia cinetica macroscopica ( ;
– al secondo membro dai lavori dovuti alle forze di pressione , alle forze viscose ∑ , alle forze gravitazionali · e al flusso di calore , dove per il modello di flusso termico , con k coefficiente di conduzione.
Per la chiusura del problema, ovvero per fare in modo che il numero di incognite sia uguale al numero di equazioni, a queste si deve aggiungere anche l’equazione di stato dei gas perfetti:
che lega la pressione con la densità e la temperatura del fluido in esame, mentre R è la costante dei gas (ad esempio per l’aria R=287 J/Kg K). Nelle equazioni sopra citate vanno poi specificate, nel dominio di calcolo, le condizioni iniziali e le condizioni al contorno. Si definisce numero di Mach M il rapporto tra la velocità del fluido e quella relativa alla propagazione delle perturbazioni all’interno del fluido stesso (velocità del suono):
Da osservazioni sperimentali si è visto che se M = 0,3 circa il fluido può essere considerato incomprimibile, in quanto le variazioni della densità, e quindi della temperatura sono molto piccole, tali da poterle considerare costanti. In questo modo il sistema di equazioni sopra menzionate non necessita dell’equazione di conservazione dell’energia, in quanto non ci sono flussi di calore legati proprio alla variazione della temperatura; le uniche equazioni che servono dunque per risolvere il problema fluidodinamico e quindi calcolare le variabili incognite, che sono la pressione (p) e le componenti di velocità (u, v, w), sono le equazioni
di conservazione della massa e della quantità di moto. Quindi riassumendo, nel caso di fluido incomprimibile, il problema è determinato da un sistema di 4 equazioni differenziali alle derivate parziali in 4 incognite, mentre nel caso più complesso di fluido comprimibile il problema è determinato da un numero maggiore di equazioni, essendoci anche l’equazione di conservazione dell’energia, l’equazione di stato dei gas perfetti, il modello completo delle equazioni per gli sforzi viscosi e l’equazione per il modello di flusso termico, per cui 15 equazioni in 15 incognite.
2.3. La
turbolenza
Le equazioni descritte precedentemente sono valide per il moto laminare, ovvero per quelle condizioni in cui gli strati di fluido, muovendosi ad una certa velocità, scorrono in modo regolare lungo la propria traiettoria, senza che questi si mescolino tra di loro; ciò è vero fino ad un certo valore della velocità, la quale, se superata, dà luogo ad un moto caotico e
disordinato delle particelle fluide, con forti mescolamenti e vorticosità. Il parametro che stabilisce il passaggio da moto laminare a turbolento è il numero di Reynolds:
dove è la densità del fluido, v è la velocità di questo, L è una lunghezza caratteristica e è la viscosità dinamica; se tale numero è basso le forze viscose sono grandi abbastanza da far in modo che non si verifichino fluttuazioni e quindi il moto si mantiene per filetti rettilinei; in caso contrario, se è elevato, il numeratore è molto più grande del denominatore e, pertanto, le forze d’inerzia sono nettamente prevalenti rispetto alle forze viscose, che non sono perciò in grado di limitare le fluttuazioni casuali e rapide della velocità. Nel primo caso si ha quindi il moto laminare mentre nel secondo il moto turbolento, ed il passaggio da dall’uno all’altro avviene ad un determinato numero di Reynolds, detto critico Recr. Come detto la caratteristica dei moti turbolenti è la presenza di vortici, cioè di parti di fluido che ruotano vorticosamente in tutto il campo di moto, contribuendo al trasporto di massa, quantità di moto ed energia tra le varie zone del campo molto rapidamente,per cui il regime turbolento comporta, dunque, fluttuazioni significative dei valori di velocità,
pressione, temperatura e, nel caso di fluidi comprimibili, anche della densità. Se, ad esempio, si osserva sperimentalmente la componente di velocità nel tempo in un punto, si può constatare che il valore medio temporale di questa, all’aumentare dell’intervallo, tende ad un valore costante, cosa che suggerisce di esprimere la velocità istantanea come somma del valore medio temporale e della componente fluttuante , per cui:
, , , , , , , ,
condizione valida per tutte le quantità fisiche.
2.3.1.
Equazioni della fluidodinamica per moti turbolenti
Prima di andare avanti con la descrizione, per vedere cosa cambia e come si modificano le equazioni precedentemente descritte è importante fare la seguente premessa: per flussi laminari è abbastanza semplice integrare le equazioni, tramite il metodo numerico dei “Volumi Finiti”, dove il dominio fluido continuo di calcolo viene suddiviso in un numero finito di volumi (detti anche “celle”) di dimensioni finite, eseguire gli opportuni calcoli ed utilizzare i risultati ottenuti, mentre per flussi turbolenti, proprio a causa della continua vorticosità, ci si aspetta di visualizzare vortici di tutte le scale, anche quelle più piccole (si può arrivare fino a 100μm di lunghezza).
Se si prende ad esempio un semplice dominio di flusso turbolento di 10cm di lato, occorrerebbero circa 10 10 celle per una corretta visualizzazione; inoltre la frequenza relativa a vortici piccoli può facilmente arrivare a 10kHz, che porterebbe alla necessità di integrare le equazioni su passi (step) temporali dell’ordine di 10 secondi. Tutto ciò richiede potenze di calcolo molto spinte, ancora oggi disponibili in pochi cluster, posseduti solo dai grossi centri di ricerca internazionali.
Da un punto di vista ingegneristico, spesso non si è interessati a conoscere ogni singolo piccolo vortice di un flusso, ma ciò che succede nel flusso medio che, tuttavia, è influenzato dalla turbolenza, ed è quindi necessario capire che influenza abbiano le fluttuazioni tipiche della turbolenza sui flussi medi.
Riscriviamo l’equazione della componente della velocità istantanea v:
Per quanto riguarda la componente media della velocità vale la seguente relazione: 1
Δt
dove l’intervallo Δt è un tempo sufficientemente lungo per rendere il valore medio indipendente dal tempo, ma non tanto lungo da far perdere informazioni sull’evoluzione transitoria del fenomeno;in altre parole deve essere grande rispetto alla scala temporale Δt della turbolenza e piccolo rispetto a quello relativo ad ogni variazione significativa del campo di moto Δt .
Per la componente fluttuante invece si ha:
1
Δt 0
mentre le principali operazioni sui valori mediati consentono di ottenere:
= + =
=0
Le relazioni appena scritte sono valide per tutte le altre quantità fisiche come le altre due componenti della velocità v e w, la pressione p, la densità , la temperatura T, e considerando, per comodità di calcolo, il moto di un fluido incomprimibile, si sostituisce nelle equazioni di conservazione della massa e della quantità di moto (Navier-Stokes) ai valori delle variabili istantanee le seguenti quantità:
, , , , , , , ,
, , , , , , , ,
, , , , , , , ,
, , , , , , , ,
e andando poi ad effettuare la media nel tempo dei vari componenti si ottengono le seguenti equazioni:
·
dove l’ultimo termine al secondo membro è il tensore degli sforzi turbolenti, detto anche tensore di Reynolds; in questo modo le equazioni di Navier-Stokes si trasformano nelle Reynolds Averaged Navier Stokes equations, cioè le R.A.N.S. Come si è detto, attualmente risulta troppo impegnativo un calcolo basato sulle equazioni dirette di Navier-Stokes (D.N.S.: Direct Navier-Stokes) nella loro forma completa, mentre la media temporale permette di concentrarsi sui valori medi del flusso, che più interessano a livello ingegneristico, eliminando però le informazioni sullo stato istantaneo del fluido; il risultato porta all’aggiunta di sei nuove incognite, ovvero le tensioni di Reynolds, per cui rispetto al caso in cui nel flusso laminare e incomprimibile ci sono 4 equazioni nelle 4 incognite (u, v, w, p) e quindi il problema risulta determinato, nel flusso turbolento e incomprimibile ci sono sempre 4 equazioni ma il numero di incognite è aumentato a 10 ( ,
, , , , , , , , ), per cui il problema è indeterminato ed è
necessario introdurre altre equazioni per renderlo determinato.
2.3.2.
Modelli di turbolenza
I modelli di turbolenza sono delle procedure di calcolo che servono per chiudere il sistema di equazioni R.A.N.S., quindi risolvere il problema e determinare le varie quantità fisiche; i modelli più comuni sono:
• modelli classici (basati sulle R.A.N.S.):
- modello a zero equazioni, caratterizzato dalla lunghezza di mescolamento; - modello a due equazioni (modello k −ε);
- Reynolds Stress Equations Model (R.S.M.).
• Simulazione di grandi vortici, basato su equazioni generali, filtrate nello spazio (L.E.S.: Large Eddies Simulation);
• Simulazione diretta (D.N.S.: Direct Navier-Stokes).
I modelli classici usano le R.A.N.S. e costituiscono la base del calcolo turbolento nei codici C.F.D. commerciali.
I metodi per il calcolo del moto turbolento si basavano su ipotesi empiriche che cercavano di stabilire una relazione fra le tensioni di Reynolds e i valori medi delle velocità; fu Boussinesq nel 1877 a creare una base teorica per lo studio di tale tipo di moto, introducendo, in analogia con la viscosità dinamica per i moti laminari di fluidi incomprimibili:
una viscosità dinamica turbolenta per le tensioni di Reynolds nel moto turbolento:
La viscosità dinamica turbolenta, a differenza di quella dinamica, non è una proprietà del fluido ma dipende fortemente dallo stato della turbolenza, e pertanto essa può variare in modo significativo da un punto all’altro e anche da un tipo di moto all’altro; la sua introduzione non costituisce un modello di turbolenza ma è lo strumento per costruirlo, per cui si tratta ora di determinare la distribuzione di tale viscosità nel campo di moto.
Andando quindi a sostituire nelle equazioni R.A.N.S. le relazioni per il tensore degli sforzi di Reynolds sopra scritte si ottiene:
·
la quale, rispetto a quella per il flusso laminare, contiene le variabili fisiche mediate nel tempo e in più il termine relativo alla viscosità dinamica turbolenta .
Esistono vari modelli di turbolenza che sono implementati nei vari codici di calcolo per l’analisi C.F.D., ma quello più diffuso, utilizzato in molte applicazioni e che racchiude un buon compromesso tra tempi di calcolo (e quindi costo computazionale), rappresentazione del fenomeno fisico da simulare e accuratezza dei risultati ottenuti è il modello k – , dove è l’energia cinetica turbolenta per unità di massa, che dà una misura diretta dell’intensità delle velocità fluttuanti, mentre è la dissipazione dell’energia
cinetica turbolenta per unità di massa. Queste due grandezze vengono usate per definire quella che è la scala delle lunghezze L:
La viscosità turbolenta può essere calcolata nel seguente modo:
√
dove è una costante empirica e andando a sostituire ad L la relazione scritta pocanzi si ottiene:
dove = 0,09.
A questa equazione algebrica vanno aggiunte altre due equazioni differenziali, una per k e l’altra per , la cui forma è:
dove , , , sono tutte delle costanti che valgono rispettivamente 1, 1,3, 1,44 e 1,92, mentre P è un termine di produzione dell’energia cinetica turbolenta dovuto alle tensioni tangenziali. In questo modo il sistema di equazioni differenziali e algebriche è in numero uguale al numero di incognite, per cui il sistema risulta determinato e può essere risolto, sempre fissando le opportune condizioni al contorno nel dominio di calcolo e le condizioni iniziali.
2.4. Risoluzione delle equazioni con il metodo numerico dei
“Volumi Finiti”
Tutte le equazioni differenziali alle derivate parziali descritte nei paragrafi precedenti (equazioni di conservazione) sono valide in tutto il dominio di calcolo, considerato come continuo per le ipotesi stabilite all’inizio del capitolo, ed hanno una struttura simile; pertanto è possibile riscriverle in una forma più generale, come, ad esempio, per l’equazione di Navier-Stokes per flussi laminari incomprimibili, nel modo seguente:
· p · µ
dove l’operatore nabla è definito in questo modo:
Se si scrive l’equazione per la componente scalare u del vettore velocità si ottiene:
· p · µ
L’idea base del metodo dei volumi finiti è quella di utilizzare la formulazione integrale, o finita, dell’equazione di conservazione sopra menzionata, scritta per un generico volume di controllo V:
· p · µ
L’applicazione del teorema di Gauss, per il quale l’integrale di volume V diventa l’integrale di superficie A, con A superficie esterna che racchiude il volume V, consente poi di esprimere l’equazione precedente come:
µ
Pertanto l’intero dominio di calcolo continuo viene suddiviso in un numero di volumi finiti, detti anche celle, chiaramente tutti collegati tra di loro, e quindi si hanno tante equazioni, come quella scritta sopra, quanti sono i volumi; ogni equazione integrale viene poi discretizzata in una forma algebrica.
Considerando come esempio la cella bidimensionale triangolare con baricentro c0 sotto rappresentata si otterrà:
Δ Δ µ ,
dove:
– è il valore di che passa attraverso le faccia f; – è il flusso di massa sempre attraverso la faccia f; – è l’area della faccia f;
– è la pressione sulla faccia f;
– , è il valore del gradiente in direzione normale alla faccia f; – Δ è il volume della cella.
Figura 2.2Cella bidimensionale triangolare
Tutti i codici di calcolo C.F.D., che risolvono le equazioni della fluidodinamica con questo metodo numerico esposto, considerano il valore delle grandezze scalari da calcolare
(nell’esempio sopra riportato e ) nei baricentri geometrici delle rispettive celle (nella figura denominati c1 e c0), ma tuttavia nella discretizzazione è richiesto anche di conoscerne il valore sulle varie facce (sempre nell’esempio e ). Per ricavare tale valore è necessaria un’interpolazione, che il programma compie utilizzando il valore di e nel baricentro della cella confinante attraverso la faccia f ; tale interpolazione può essere del primo o del secondo ordine; nel primo caso si considera il valore nel baricentro della cella come media di tutti i valori all’interno di essa, per cui questo viene assunto anche sulla faccia in questione, mentre nel secondo si ha una vera e propria interpolazione in cui al valore del baricentro si aggiunge, o si sottrae, il prodotto del gradiente di φ calcolato fra i valori dei due baricentri, nota la loro distanza, per la distanza della faccia dal baricentro stesso.
Naturalmente una discretizzazione del secondo ordine fornisce risultati più accurati, soprattutto quando il flusso del fluido non ha la stessa direzione degli elementi della griglia di calcolo; dunque in un flusso stazionario, laminare e senza eccessive deviazioni, il primo ordine può essere sufficiente, mentre in casi più complessi è opportuno utilizzare una discretizzazione al secondo ordine; il prezzo da pagare, in quest’ultimo caso, sarà una maggiore pesantezza del modello matematico e un allungamento del tempo di calcolo.
Lo schema generale di discretizzazione fin qui descritto, è applicato a tutte le equazioni differenziali caratterizzanti un sistema fisico, con opportune modifiche a seconda dei vari casi da risolvere.
Ca
Pr
3.1
Il pr mode conto panc nellaapitolo
eproc
. Geom
rimo passo ellatore sol o del regola e laterali e a figura 3.1. Error3
cessing
metria d
per affron ido (nel no amento des il fondo pia re. Nel documg e ge
ella vett
ntare il lavo ostro caso S critto prece atto da mon mento non esiseneraz
tura
oro di ques SolidWorks edentemente ntare succes ste testo dellozione
sta tesi è s s 2009®), le e. Sono stat ssivamente o stile specificdelle
stato quello e carene de ti modellati sul telaio, c cato. ‐ Esplosmesh
o di creare, ella vettura i quindi il m come si può so carene , tramite tenendo muso, le ò vedereUna comp volum Un l fluss volta mon ponenti più me da essi o ivello di de o. Fig ntate le car ù complessi occupato, p ettaglio ecc gura 3.3 – Ass rene sull’as con altri p per evitare d essivo non Figura ieme original ssieme (fig più semplici di appesanti influenza i a 3.2 – Assiem le (a sinistra) gura 3.2) è i, tenendo c re inutilmen infatti in m me vettura e assieme sem è stato nec comunque i nte la simul modo rilevan mplificato (a d cessario sos in considera lazione (fig nte l’andam destra) stituire i azione il ura 3.3). mento del
Il lav mode probl per d attrav secon porta Il ca Paras La m otten mesh spieg 3.1.1 Com dei costi voro di mo ello e apert lemi durant due motivi verso super ndo luogo e ato a modell ad completo solid (.x_t) modellazion nere senza p h. Prima di e gato in segu 1.
Mode
me detto in p coefficienti ituenti la gr odellazione to in STAR te la fase d : in primo rfici, in part erano state lare l’intera o e definiti (figura 3.4) Figu ne così effe problemi un effettuarla, uito.elli di vett
precedenza i aerodinam iglia di calc e è stato ab R-CCM, ci di generazio luogo era ticolare le p create part a vettura in u vo della ve ). ura 3.4 – Impo ttuata e l’im na “superfici tuttavia, è sura
questo stud mici (Cx, colo. Oltre bbastanza l siamo resi one della m ano state cr pance latera ti distinte e un’unica pa ettura è sta ortazione del mportazione ie esterna” d stato necess dio ha l’obie Cz, Cmy) a questo è r lungo in qu conto che mesh di supe reate geom ali e il muso e poi unite p arte tramite ato importat modello in St e in formato della vettur sario fare tutettivo di eff al variare richiesta un uanto, una l’importazi erficie. Que metrie divers o, e altre att per formare volumi. to in STAR tar CCM® o Parasolid ra, che servi
tti i settaggi fettuare un’a e del nume n’analisi sul volta term ione avrebb esto princip se tra loro traverso vol e l’assieme R-CCM in hanno perm irà per la su i del modell analisi di se ero degli e lla variazion minato il be creato palmente (alcune lumi); in . Ciò ha formato messo di uccessiva lo, come ensibilità elementi ne di tali
coeff piatto estra un’an due a diver
3.2
3.2.1 Il do (l’ari con stess Nella cui e circo cons Per l’equ ficienti al v o. Per quest attori lateral ngolazione anche con d rse geometr F. Dom
1.Geom
ominio di c ia) che avvole misure, a. a realtà la m essa avanza ostante non eguente svi cercare di uivalenza d variare di un to motivo n i inclinati d maggiore, differenze n rie. Figura 3.5 – Fo
inio di c
metria de
calcolo, che olge e inves visualizzab monoposto p a lungo la m si muove, luppo delle ricreare l ata dal fattn elemento ne sono stat di 6°. Purtro ma comunq non troppo e ondo piatto n
calcolo
el dominio
e nella sim ste l’auto, è ili sotto, st percorre il r medesima c ma viene p forze aerod le stesse c to che un f aerodinami ti modellati oppo i vinco que è stato elevate. Ne ormale (a sino di calcol
mulazione nu è raffigurato tabilite nelle rettilineo de con le ruote perturbata d dinamiche s condizioni n fluido che co importan due: uno n oli sul telaiointeressant lla figura 3 istra) e con es
lo
umerica rap o come un u e tre direzi ella strada ad e che rotola al passaggi su di essa. nel miglior si muove a nte della ve normale ed u o non hanno te osservare .5 vengono strattori (a de ppresenta i unico parall ioni in base d una determ ano, mentre o stesso de r modo po attorno ad ettura come uno con due o permesso e le variazi o visualizzat estra) il volume d lelepipedo ( e al passo d minata velo e l’aria atm ella macchin ossibile, sf un corpo i il fondo e piccoli di avere oni tra i te le due di fluido (fig. 3.6) dell’auto ocità, per mosferica na con il fruttando n quieteprodu conta fluid realtà dell’ forze
uce gli stes a è il moto do dalle dim à, ma tali aria attorno e aerodinam ssi effetti di o relativo tr mensioni ch da essere a o a questo n miche non co Figur i un corpo ra i due (pr e, chiarame abbastanza non venga a orretto. Figura ra 3.7 – Domin che si muo rincipio di ente non po grande, ris alterato, cos 3.6 – Dominio nio di calcolo ove in un fl reciprocità) ossono esser spetto al ve sa che dareb o di calcolo – Misure long luido in qui ), viene rea re infinite, eicolo, da f bbe come r gitudinali iete, perché alizzato un com’è inve far si che risultato val é ciò che dominio ece nella il flusso ori delle
3.2.2
La v delle di og coesi poste fondo valor come • Mu • Fon • Pan • Par • Rad • Gru • Gru • Van • Ruo • Ser2. Sud
vettura è sta e superfici p gnuna di qu istono elem eriore) con o). La sudd ri di mesh d e è possibile uso; ndo piatto; nce laterali; ratie lateral diatori; uppo motor uppo differe no pilota; ote; rbatoi; 8 m Figudivisione
ata suddivis più regolare ueste parti. A menti picco elementi d divisione na diversi in tu e vedere nel ; li; re-silenziato enziale-moll ura 3.8 – Domelementi
sa in divers e in modo A differenz li (braccett di superfici asce proprio utte le super lle figure se ore; le; minio di calcolovettura
se parti in da poter stim za dello stud ti sospensio ie maggior o dal fatto rfici. In part eguenti: o – Misure tra modo da c mare il con dio di una v oni, braccet re (muso, p di consenti ticolare son asversali onsentire u ntributo in te vettura chiu tti dello st pance latera ire facilmen no state crea 8 m una discretiz ermini aerod usa, nel nos terzo, telaio ali, paratie nte l’inserim ate le seguen zzazione dinamici stro caso o, assale laterali, mento di nti parti,• Telaio; • Ingresso aspirazione; • Ingresso radiatori; • Uscita radiatori; • Spessore radiatori; • Spessori vari; • Uscita scarico; • Tappi razze; • Strada;
• Superficie strada sotto la vettura.
In particolare, la parte denominata Motore comprende il motore, l’aspirazione e il silenziatore, la parte denominata Telaio comprende il telaio, i braccetti delle sospensioni, i condotti di scarico e i portamozzi di tutte le ruote, ed il gruppo Ruote comprende le ruote, i cerchi (ad eccezione della superficie interna delle razze) ed il mozzo.
Le parti denominate Ingresso aspirazione e Uscita scarico potevano essere inserite nel gruppo Motore, ma sono state messe a parte perché è necessario in seguito assegnargli condizioni fisiche particolari per l’analisi.
Per quanto riguarda il box, invece, esso è stato diviso in 6 parti, che comprendono ovviamente le sei facce del parallelepipedo:
• Ingresso box; • Parete 1 box; • Parete 2 box; • Strada; • Soffitto box; • Uscita box.
Figura 3.9 – Suddivisione elementi della vettura
3.2.3.
Le Regions
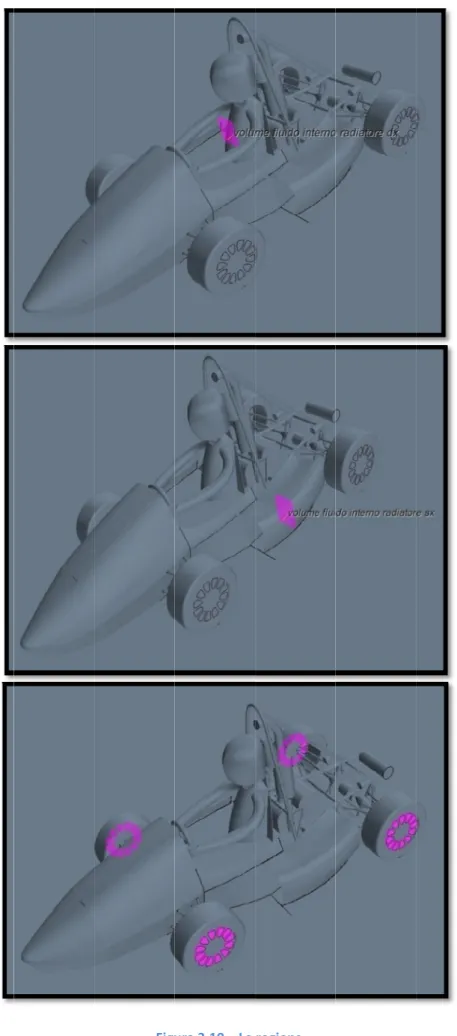
La griglia di calcolo è stata suddivisa in quattro zone, denominate regions, che per il programma rappresentano i volumi contenenti il fluido (figure 3.9-3.12), nel seguente modo:
• Dominio fluido principale;
• Volume fluido interno radiatore destro; • Volume fluido interno radiatore sinistro; • Volume fluido interno razze.
La region Dominio fluido principale comprende il volume occupato dal fluido esterno alla vettura, limitato dall’auto stessa e dalle pareti del box, per l’analisi dell’aerodinamica esterna; le regions Volume fluido interno radiatore destro e Volume fluido interno
radiatore sinistro rappresentano il volume interno dei radiatori, mentre la region Volume fluido interno razze contiene i volumi d’aria racchiusi tra le razze delle ruote; la creazione
di queste regions permette di assegnare condizioni specifiche ai vari componenti. Ogni volume fluido appena specificato è delimitato da varie superfici, dette boundaries, alcune delle quali, denominate interfaces (interfacce) hanno anche la funzione di elementi di confine tra domini fluidi adiacenti tra di loro; a loro volta queste interfacce possono essere impostate come internal interface boundary, quando consentono il passaggio di massa fluida da una region ad un’altra (da un volume fluido ad un altro) come nel caso delle superfici di ingresso e di uscita dei radiatori, oppure come baffle boundary, quando sono superfici di contorno solide, che non consentono quindi chiaramente nessun flusso, come per le superfici denominate spessori dei radiatori.
3.2.4.
Il modello fisico
Prima di settare le condizioni al contorno è necessario definire il “modello fisico” utilizzato, che delinea le variabili primarie della simulazione, ovvero pressione e velocità, e quale metodo matematico viene utilizzato per generare la soluzione del sistema di equazioni. Come detto nel capitolo precedente STAR-CCM imposta il problema attraverso un sistema di equazioni differenziali in cui le incognite sono grandezze fisiche, vettoriali e scalari, di cui, alla fine del processo di soluzione, tramite l’ausilio del metodo dei volumi finiti ed il tipo di solutore, fornisce i valori. E’ possibile scegliere tra due tipi di solutore per risolvere il sistema di equazioni: segregated o coupled, dove in entrambi il programma compie le stesse operazioni di base quali:
− integrazione delle equazioni differenziali del sistema nei singoli volumi discreti, così da ottenere le equazioni algebriche per le variabili incognite, quali pressione, velocità, temperatura e per quelle relative a variabili dei modelli addizionali eventualmente introdotti;
− linearizzazione delle equazioni discretizzate (mediante interpolazione del primo o secondo ordine, come spiegato nel capitolo 2) e risoluzione del conseguente sistema lineare per permettere l’aggiornamento delle variabili incognite.
Per quanto riguarda la differenza tra i due tipi di solutori qui di seguito si riportano le operazioni di calcolo eseguite da entrambi;
• solutore segregated (risoluzione sequenziale delle equazioni del sistema, una per volta):
- aggiornamento delle proprietà del fluido, basate sulla soluzione corrente, o, se si è alla prima iterazione, sull’inizializzazione del sistema fatta dal programma in base alle condizioni iniziali;
- risoluzione dell’ equazione di bilancio della quantità di moto per ogni componente di velocità, usando i valori correnti di pressione e flusso di massa, così da aggiornare il campo di velocità;
- se le velocità ottenute al passo precedente non soddisfano le equazioni di continuità locale, si deriva, dall’equazione di continuità e da quelle linearizzate di bilancio della quantità di moto, un’equazione di correzione della pressione, che viene risolta per ottenere le necessari correzioni per la pressione stessa, per il campo di velocità e per il flusso di massa, così da soddisfare il requisito di continuità;
- se necessario, sono risolte equazioni con incognite scalari, quali la turbolenza, utilizzando i valori aggiornati delle grandezze significative;
- verifica della convergenza dell’intero set di equazioni;
- esecuzione delle iterazioni di calcolo finché non si è raggiunto il criterio di convergenza e i valori delle variabili sono stabilizzati.
- aggiornamento delle proprietà del fluido, basate sulla soluzione corrente, o, se si è alla prima iterazione, sull’inizializzazione del sistema fatta dal programma in base alle condizioni iniziali;
- risoluzione simultanea delle equazioni di continuità di massa e di bilancio della quantità di moto;
- se necessario, sono risolte equazioni con incognite scalari, quali la turbolenza, utilizzando i valori aggiornati delle grandezze significative;
- verifica della convergenza dell’intero set di equazioni;
- esecuzione delle iterazioni di calcolo finché non si è raggiunto il criterio di convergenza e i valori delle variabili sono stabilizzati.
In entrambi i metodi appena esposti le equazioni differenziali alle derivate parziali non lineari del problema, discretizzate sui volumi finiti, linearizzate per produrre il sistema di equazioni algebriche per ogni singola cella della griglia di calcolo, e poi risolte iterativamente per l’aggiornamento dei valori, possono utilizzare due schemi per determinare il valore delle variabili:
• schema esplicito: il valore nodale dell'incognita all'iterazione (n+1) è espresso mediante i valori delle incognite ai nodi limitrofi (nb) ed al nodo stesso (P), valutati al passo (n):
(
n)
nb n P n P=
f
Φ
Φ
Φ
+1,
;• schema implicito: il valore nodale dell'incognita all'iterazione (n+1) è espresso mediante i valori delle incognite ai nodi limitrofi (nb), valutati allo stesso passo (n+1), oltre che del valore al nodo stesso (P), valutato al passo (n):
(
1)
1,
+ +=
Φ
Φ
Φ
n nb n P n Pf
.
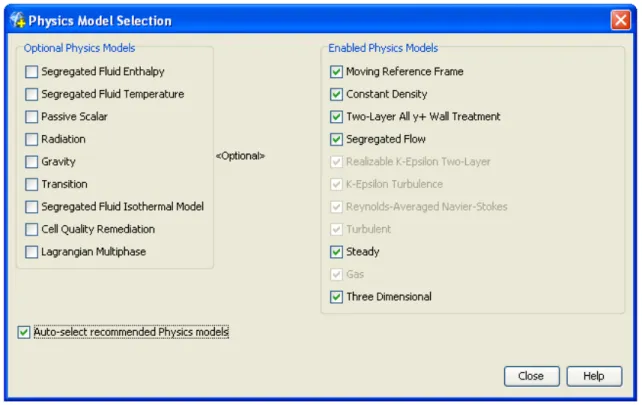
Selezionando le caratteristiche di nostro interesse, dal box di dialogo del programma, si definisce il modello fisico nel modo seguente:
• Gas,
• Three Dimensional, • Segregated Flow,
• Moving Reference Frame, • Constant Density,
• Steady, • Turbulent,
• K-Epsilon Turbulence.
Le condizioni operative sono quelle dell’aria standard, riportate nella tabella 5.3.
T 288.15 [K] ρ 1.225 [Kg/m3] µ 1.7894·10-5 [Pa s] PAmb 101325 Pa Tabella 3.1: Aria standard
L’opzione Moving Reference Frame serve per definire la rotazione di volumi fluidi specifici, viene quindi attivata nel modello fisico ma specificata solo nelle regioni opportune, come nel caso dell’aria compresa fra le razze delle ruote, definendo l’asse di rotazione e le rispettive velocità di rotolamento. Per quanto riguarda il modello di turbolenza utilizzato per chiudere le equazioni RANS, si sceglie il modello k-ε contenente altre due equazioni differenziali, ed il programma automaticamente fornisce l’impostazione Two-Layer All y+ Wall Treatment, definita per
flussi turbolenti separati o in zone con elevati gradienti di pressione. Il flusso è stato inizializzato in ogni cella con una velocità uniforme pari a quella asintotica
e pressione ambiente, e nelle superfici di ingresso ed uscita del flusso sono stati imposti i seguenti valori:
• Viscosity ratio = 10.
Nella finestra seguente di Starccm+ sono schematizzate le impostazioni settate per il modello di fluido.
Figura 3.11: Il modello fisico in Starccm+
3.2.5. Condizioni al contorno
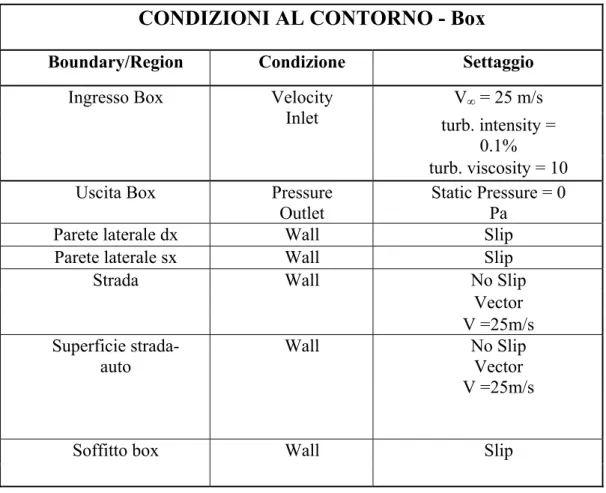
L’ultimo passo per calcolare la soluzione numerica è l’assegnazione delle condizioni al contorno nei rispettivi domini fluidi (region) e superfici (boundary) relative; è importante ribadire che è stato utilizzato il principio di reciprocità, dove la vettura viene tenuta ferma e investita da un flusso d’aria pari alla velocità con cui essa vedrebbe l’aria se fosse in movimento. Di seguito sono riportati i settaggi impostati per le simulazioni effettuate dove, nello specifico, si vogliono valutare le forze aerodinamiche (e quindi i relativi coefficienti) con il veicolo che si muove in rettilineo ad una velocità di 90 km/h (25 m/s).
BOX
• ingresso box (boundary) Æ Velocity Inlet
• uscita box (boundary) Æ Pressure Outlet
La condizione al contorno imposta all’uscita del box posteriore è Pressure Outlet, tramite la quale viene definita la pressione statica della superficie considerata.
• parete laterale dx e sx box, soffitto box (boundary) Æ Wall, Slip
Per non aggiungere vorticità nel campo sotto forma di stato limite, non esistente nella realtà, sono state assegnate le condizioni di parete (Wall) senza azioni di attrito (Slip). • strada, superficie strada-auto (boundary) Æ Wall, No slip, Vector
Affinchè il principio di reciprocità sia soddisfatto, alle due superfici sotto la vettura sono state date la condizione wall – moving traslate, imponendo una velocità di traslazione pari a quella del flusso in ingresso.
CONDIZIONI AL CONTORNO - Box
Boundary/Region Condizione Settaggio
Ingresso Box Velocity
Inlet
V∞ = 25 m/s turb. intensity =
0.1%
turb. viscosity = 10
Uscita Box Pressure
Outlet
Static Pressure = 0 Pa
Parete laterale dx Wall Slip
Parete laterale sx Wall Slip
Strada Wall No Slip
Vector V =25m/s Superficie strada-auto Wall No Slip Vector V =25m/s
Soffitto box Wall Slip
Tabella 3.2 ‐ Condizioni al contorno box
AUTOVETTURA
E’ st della impo di rif • dom fram Per u rotaz fluid come devo inter tata imposta a superficie ostando l’as ferimento co minio fluido e una miglio zione ai volu do interno ra e interfaccia ono essere c rnal interfac a la velocità e sotto l’au sse di rotazi onvezionale Figur o interno ra r simulazio umi d’aria c azze dalla re a fra le due completame ce boundary à di rotolam uto (che ra one e le dis e (laboratory ra 3.12: Cond azze ruote
one del flu compresi fra egion Domi e, denomina ente permea y. mento delle appresenta stanze relati y). izioni impost anteriori e usso intorno a le razze de inio fluido p ate tappi; qu abili, per cu ruote, deter la strada) ive di ogni c e sulle ruote posteriori o alle ruote elle ruote, e principale so ueste superf ui questa co rminata con e la dimen centro ruota anteriori (region) Æ e viene dat e per divider ono state cr fici, non esi ondizione v noscendo la nsione dell a rispetto al Æ Moving r ta la condiz re la region reate delle s istendo nell viene defini velocità le ruote, l sistema reference zione di n Volume uperfici, la realtà, ita come
• rad I rad raffre di in uscit volum boun princ mass dati r - XX - YY - resi (auto Poich limit ment Alle diatori dx e s diatori nella eddamento ngresso, la a ta. Per la si me poroso ndary perch cipale e il sa fluida. richiesti dal X, direzione Y, una secon istenza iner omaticamen hé vogliamo ta ad inseri
tre per le alt rimanenti s Figu sx (region) a realtà con del motore attraversa a imulazione e le superf hé, essendo Volume flu Per l programm della norm nda direzion rziale poros nte calcolata o che il flu ire i valori tre direzion superfici (bo ra 3.13: Cond Æ Porous r ntengono al , e l’aria, ch sportandone invece il v fici di ingre delle interf uido interno definire la ma: ale entrante ne normale a sa e resiste a normale al sso avveng giusti, calc i si indicano oundary) de dizioni impost region ll’interno la he arriva da e il calore p volume inte esso e di us facce, sono o radiatori, a porosità d e nel radiato a YY; enza viscos lle prime du a solo nella colati speri o valori di 3 ella vettura è te sulle razze a a tubazione all’esterno m
per poi usc erno al radi scita sono s elementi di dove quin del radiatore ore; a porosa, n ue). a direzione imentalmen 3 ordini di g è stata data anteriori e entro cui mediante la cire nella su iatore è sta settate come i confine tr ndi è consen e sono stati nelle direzi del moto (d nte, solo pe grandezza su la condizio scorre il f a superficie uperficie rad ato imposta e internal i ra il Domini ntito il flus i definiti i oni XX, Y direzione X er la direzio uperiori. one Wall, No fluido di radiante diante di ato come interface io fluido sso della seguenti YY e ZZ XX), ci si one XX, o Slip.
CONDIZIONI AL CONTORNO - Autovettura
Boundary/Region Condizione Settaggio
Ruote anteriori Wall Local rotation
rate Centro rotazione asse
Velocità di rotazione
Ruote posteriori Wall Local rotation
rate Centro rotazione asse Velocità di rotazione Volume fluido
interno razze ruote anteriori Fluid region Moving reference frame Centro rotazione asse Velocità di rotazione Volume fluido
interno razze ruote posteriori
Fluid
region reference frame Moving Centro rotazione asse
Velocità di rotazione
Radiatori Porous
region Principal tensor Porous inertial resistance Porous viscous resistance Superfici rimanenti Wall No slip Tabella 3.3: Condizioni al contorno autovettura
3.3. Mesh
di
superficie
La mesh di superficie è molto importante per simulare i flussi attorno ai veicoli di qualsiasi tipo, soprattutto nei casi di geometria complessa e con un elevato numero di dettagli, che determinano la presenza di molti gradienti di pressione; si ha quindi l’esigenza di creare una griglia superficiale che sia il più possibile fitta e regolare, ma nello stesso tempo le celle non devono essere troppo piccole e quindi numerose da richiedere un eccessivo costo
computazionale.
STAR-CCM consente di utilizzare sia griglie superficiali triangolari, sulle quali poi viene creata la griglia di volume tetraedrica, sia griglie superficiali esagonali, dove crea quella di volume poliedrica; la differenza sostanziale sta nel fatto che quando il processore calcola il valore delle variabili termofluidodinamiche di ogni cella, riferito al baricentro di quest’ultima, lo fa coinvolgendo i valori dei baricentri delle celle adiacenti, che nel caso della prima tipologia di griglia di volume sono quattro mentre nel secondo sono di più, a seconda del numero di facce di cui è composto il poliedro, per il fatto di avere una funzione di interpolazione di ordine maggiore e quindi con un grado di approssimazione migliore. STAR-CCM crea prima la griglia di volume tetraedrica, dalla quale poi unisce più celle di questo tipo per ottenerne una poliedrica, per cui il numero di elementi nel secondo caso è inferiore rispetto al primo; il volume fluido discretizzato con tale griglia, rispetto a quella tetraedrica, contiene un numero di celle inferiori, con lo svantaggio di avere informazioni, per quanto riguarda velocità e pressione, in meno punti del campo, ma contemporaneamente il modello matematico è affetto da un errore inferiore, come prima evidenziato. D’altra parte c’è anche da sottolineare che comunque i risultati ottenuti con le due griglie non sono mai esatti perché le equazioni sono risolte con metodi numerici, per cui ciò che conta in studi di questo tipo è quello di fare sempre analisi di sensibilità all’infittimento della griglia e che i risultati ottenuti convergano a dei valori sempre più stabili o che oscillino pochissimo, ma con un tempo globale di calcolo ragionevole. Pertanto per il nostro studio si è utilizzata la griglia di volume poliedrica, e di conseguenza quella superficiale risulta essere esagonale, la quale richiede risorse hardware e prestazioni
di calcolo impegnative, ma inferiori rispetto all’utilizzo di quella tetraedrica. Le caratteristiche della griglia generata sono:
• spaziatura di griglia pari a 20 mm come valore base, con la possibilità di variarlo, aumentandolo o diminuendolo, a seconda delle dimensioni del componente da discretizzare;
• elementi di griglia esagonali, come specificato pocanzi;
• skewness angle (angolo tra il vettore congiungente i baricentri di due celle attaccate e la retta normale passante per lo spigolo in comune delle medesime) massimo inferiore a 0.9, con un limitato numero di elementi aventi skewness superiore a 0.6.
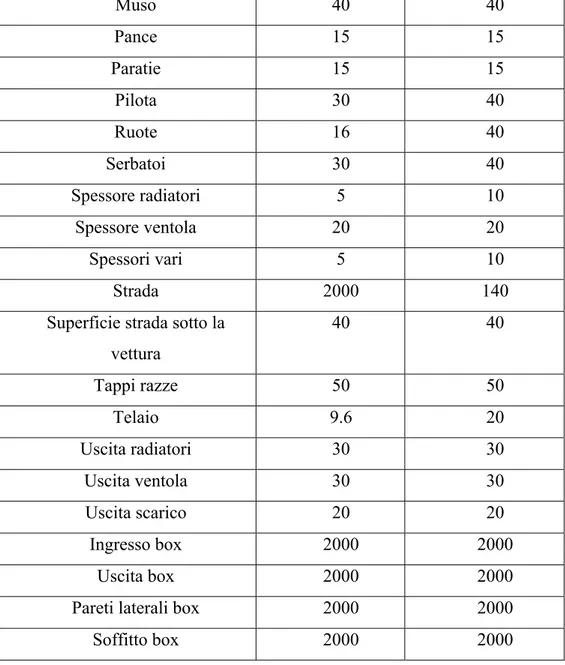
La creazione della griglia avviene in modo automatico; tuttavia, la qualità di questa risulterà ancora non soddisfacente, a causa dell'alto numero di celle degeneri (fuori skewness) e nella presenza di superfici che non sono state meshate in modo adeguato. Gli elementi fuori skewness sono dovuti fondamentalmente alla presenza di superfici con angoli troppo acuti, o alla presenza di nodi ridondanti che forzano la griglia. Anche il miglioramento della griglia ha richiesto un tempo piuttosto lungo a causa dell'elevato numero di modifiche per incrementare il numero di elementi di griglia e la qualità della mesh. A questo punto è stato possibile effettuare la mesh finale di superficie della vettura e del box con i seguenti valori, assegnando come Base size il valore, definito prima, di 20 mm; in tabella è possibile vedere tutti i valori assegnati ai vari componenti nella mesh che useremo come prima simulazione.
Componente
Relativ
e
minim
um size
(mm)
Relative
target
size
(mm)
Fondo 30 30 Gruppo differenziale-molle 24 40 Gruppo motore-silenziatore 30 50 Ingresso aspirazione 20 20 Ingresso radiatori 30 30 Ingresso ventola 30 30Muso 40 40 Pance 15 15 Paratie 15 15 Pilota 30 40 Ruote 16 40 Serbatoi 30 40 Spessore radiatori 5 10 Spessore ventola 20 20 Spessori vari 5 10 Strada 2000 140
Superficie strada sotto la vettura 40 40 Tappi razze 50 50 Telaio 9.6 20 Uscita radiatori 30 30 Uscita ventola 30 30 Uscita scarico 20 20 Ingresso box 2000 2000 Uscita box 2000 2000
Pareti laterali box 2000 2000
Soffitto box 2000 2000
Tabella 3.4 ‐ Caratteristiche della prima griglia di superficie poliedrica
Con questi parametri è stato possibile ottenere la prima mesh di superficie, che ci servirà nella prima simulazione. Nella figura 3.10 è possibile vedere la mesh triangolare, che sarà sostituita successivamente da quella esagonale.
3.3.1
La m surfa (fig.3 error Ques in pr1 Migli
mesh finale ace, il qual 3.11); la su ri che posso sti pochi pr recedenza su Figuioramento
e di superfi e ha eviden uperficie pre ono comprom roblemi, fac ul modellato ura 3.15 – Mi Figura 3o della me
ficie così o nziato la pr esenta anch mettere la fu cilmente elim ore solido. glioramento 3.14 – Mesh desh finale
ottenuta è s resenza di e qualche C futura simul minati, han della mesh di di superficiee
stata contro soli 4 free Close proxi azione, e pe nno conferm i superficie su ollata con i edges sul mity face, m ertanto veng mato la bont ul muso della il comando muso della ma questi n gono lasciat tà del lavor vettura o Repair a vettura non sono ti. ro svolto3.4.
Lo s conc alle c comp l’acc I fatt • • •Mesh
sviluppo de lusa: parte camere este plessivi. Ch curatezza de tori consider face val faccia ris volume n volume accettabi skewnes volume a ridurre ladi volum
ella mesh d dalle celle erne del boxhiaramente ella soluzion rati da STA lidity metri spetto al ba negativo, e change met ile deve ess ss angle, an attaccate e l a stabilità d
me
di volume s più fitte, pr x, dove la m dalla qual ne ottenuta. AR-CCM pe c, misura l aricentro del quindi da c tric, indica sere superio ngolo fra il la normale a della soluzio Figura si appoggia resenti sulla mesh è più lità della m er valutare la la correttez lla cella; va orreggere; il rapporto re a 1*10-5; vettore ch allo spigolo one. a 3.16 – Mesh a su quella a superficie rada per co mesh di vo a qualità de zza dell’ori alori inferior o fra il volu he unisce i o in comune di volume superficial del modell ontenere il n olume dipe ella mesh so entamento ri allo 0.5 in ume di celle due baricen e; valori infe le preceden lo, e si este numero di e ende l’effic ono: della norm ndicano cell e vicine; pe ntri di due eriori a 85° ntemente nde fino elementi cienza e male alla le aventi er essere celle di possonoCom stata comp Nello deter propr simu me possiamo sostituita pletezza ven o studio ae rminare la rio per av ulazione è st M Mi Ce Tabella 3.5 ‐ o vedere dal dopo la c ngono ripor Figura erodinamico soluzione d vere una m tata generat Griglia Numero Numero f Minimum fac nimum volu elle con skew ‐ Caratteristic l dettaglio n creazione d rtati di segui a 3.17 – La nu o di un’aut del campo è maggiore qu to un volum poliedrica celle facce ce validity me change wness > 95° che della prim nella figura di quella ito i risultat uova mesh di ovettura, u è la presen ualità della me denomin di volume ma griglia di vo a 3.17, la m di volume ti relativi all superficie sul no degli el za dello str a mesh in nato Box au 460003 3240210 9.46‐1 2.20‐4 3 olume poliedr mesh triango dalla mes la mesh otte la vettura lementi da rato limite questa zo uto e scia (f rica olare di sup sh poligon enuta. non trascu intorno al ona, nella fig 3.18), all perficie è nale. Per urare nel corpo, e seconda l’interno
del q studi 3.19 creat quale è stato iare maggio e 3.20 è p to attorno al o dato un li ormente l’in possibile no lla vettura. Fig imite massi nfluenza de otare la disp Figura 3.1 gura 3.19 – M
imo alla dim l flusso vic posizione d 18 – Volume B esh con il vol mensione de cino alla ve delle celle d Box auto e scia ume Box auto elle celle di ttura e nell di volume p a o e scia i volume, a a scia. Nell poliedriche al fine di le figure nel box
Figura 3.18 8 – Particolare della mesh con volume BBox auto e sciia
Ca
An
4.1
passo con comp • • • • Il sis defin simm asint cui i longiapitolo
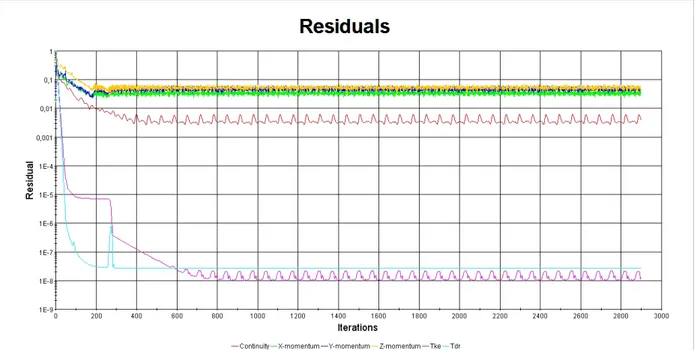
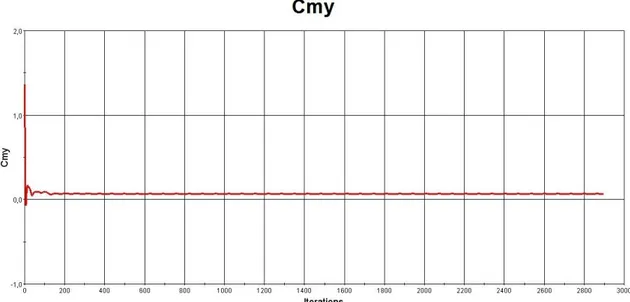
nalisi d
. Defini
Una volt o successivo il grande v plessivi dell variabili sforzi no vettura; contribut preceden rapprese stema di rife nito dalla p metria longi totico, l’asse il piano xy itudinale [FF
ZaM
y4
dei ris
zione de
ta che è sta o è quello d vantaggio, le forze aero termofluid ormali (pres to alle ntemente); entazione gr ferimento pe proiezione tudinale de e z è vertica y risulta pe Figura 6.1]F
F
Zx
z
ultati
ei coeffi
ata raggiunt di analizzare rispetto a odinamiche odinamiche ssioni) ed sf forze dirafica dei ris er la valutaz della linea lla vettura. ale verso l’a erciò paral
F
Xcienti ae
ta la conve e e valutare quella sper e agenti sul e in tutto il d forzi tangen qualsiasi sultati. zione delle a di contatt Come si pu alto e l’asse lelo al suoerodinam
ergenza di o i risultati o rimentale, d corpo, anch dominio di nziali (azion elemento forze aerod to ruote an uò notare l’a e y è tale da olo, mentreF
Zpmici
ogni simula ottenuti tram di visualizz he: calcolo: ni viscose) su della v dinamiche h nteriori – s asse x è in a rendere la e il pianoy
z
azione num mite l’analisi zare, oltre a ulla superfi vettura (im ha origine n suolo sul p direzione d terna destro xz è di siz
merica, il i C.F.D., ai valori icie della mpostato nel punto piano di del flusso orsa, per immetriaIl valore dei coefficienti aerodinamici viene valutato nel seguente modo: 1 2 ∞ 1 2 ∞ 1 2 ∞ dove:
• , e sono i valori delle forze e del momento attorno all’asse y che STAR-CCM calcola con i metodi spiegati precedentemente, dati come sommatoria dei contributi delle componenti degli sforzi di pressione e viscosi, riferiti al baricentro di ogni singola cella di superficie con cui è stata discretizzata la monoposto;
• è la densità dell’aria, come detto precedentemente; • ∞ è la velocità del flusso libero;
• è la sezione frontale della vettura; • è il passo della medesima.
Altre due caratteristiche importanti per verificare i risultati ottenuti sono il bilanciamento e l’efficienza aerodinamica; la prima definita come il rapporto tra il coefficiente di portanza sull’anteriore ed il coefficiente di portanza globale dell’intera vettura:
mentre la seconda come il rapporto tra il coefficiente di portanza (con il segno meno) ed il coefficiente di resistenza: