Dott.ssa Sandra Lucente1
Tabelle per l’integrazione
Integrali elementari
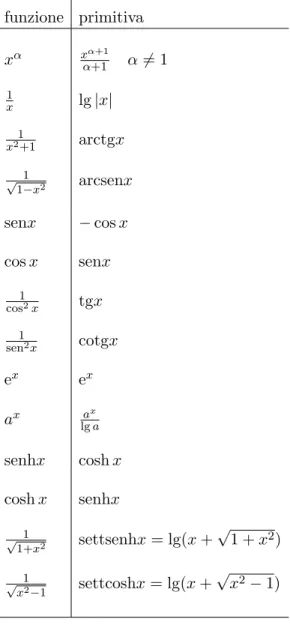
L’integrale indefinito rappresenta l’insieme delle primitive di una funzione, la tabella successiva d`a solo una delle primitive. Nella tabella viene sottointeso il dominio delle funzioni. La tabella ha validit`a su ogni INTERVALLO contenuto nell’intersezione del dominio della funzione con il dominio della primitiva. In particolare su questi INTERVALLI due primitive diÆeriscono di una costante.
funzione primitiva xÆ xÆ+1Æ+1 Æ6= 1 1 x lg |x| 1 x2+1 arctgx 1 p 1°x2 arcsenx senx ° cos x cos x senx 1 cos2x tgx 1 sen2x cotgx ex ex ax lg aax senhx cosh x cosh x senhx 1 p 1+x2 settsenhx = lg(x + p 1 + x2) 1 p x2°1 settcoshx = lg(x + p x2° 1) Integrali immediati Dalla regola di derivazione delle funzioni composte
D(f (')) = f0(')'0
si deduce la prima regola di sostituzione (ovvero quella usata per gli integrali immediati) Z
f0(')(x)'0(x) d x = f('(x)) + C.
1Questi appunti potrebbero contenere sviste ed errori, vi prego di segnalarmeli, ad esempio via email. Versione del
20-05-08
Integrazione per parti Dalla regola di derivazione del prodotto
D(f g) = f0g + f g0 si deduce la regola di integrazione per parti
Z
f (x)g0(x) d x = f(x)g(x) ° Z
f0(x)g(x) d x.
La funzione g (che viene sempre integrata) si chiama fattore diÆerenziale,la funzione f (che viene derivata nell’integrale a secondo membro) si chiama fattore integrale.
Nella successiva tabella vediamo ALCUNI casi notevoli di integrazione per parti
integrale fattore diÆerenziale
R xneÆxd x n2 N, Æ 2 R eÆx R xÆlg x d x Æ 2 R xn R xnarctg(x) d x n 2 N xn R xncos x d x n 2 N cos x R xnsenx d x n 2 N senx R arcsenx d x 1 R p ax2+ bx + c d x 1 R
eÆxsenØx d x Æ, Ø 2 R eÆx oppure senØx
R
eÆxcos Øx d x Æ, Ø 2 R eÆx oppure cos Øx
R
sen(Æx)sen(Øx) d x Æ, Ø 2 R senÆx oppure senØx R
sen(Æx) cos(Øx) d x Æ, Ø 2 R senÆx oppure cos Øx R
cos(Æx) cos(Øx) d x Æ, Ø 2 R cos Æx oppure cos Øx
La formula di integrazione per parti si applica in generale ripetutamente e molto spesso ci si trova in una situazione del genere:
Z
(f(x))mg0(x) d x = h(x) + KZ (f(x))kg0(x) d x
con k ∑ m, K 2 R ed h una opportuna funzione. Vi sono allora varie possibilit`a
• Ripartire con l’integrazione per parti fino a ridursi a k < m con R(f(x))kg0(x) d x facilmente
calcolabile;
• Utilizzare qualche informazione algebrica che riconduca a k = m ed usare una equazione in cui l’incognita `e l’integrale assegnato;
• Riguardare il problema in modo parametrico rispetto ad m e costruire una successione definita per ricorrenza di tali integrali. Risolvere l’integrale base della successione e giungere quindi passo per passo all’integrale desiderato.
Integrazione di funzioni razionali con denominatore di secondo grado Ci si pu`o sempre ricondurre allo studio di
Z 1
ax2+ bx + cd x
¢ ax2+ bx + c R ax2+bx+c1 d x metodo
¢ > 0 a(x ° x1)(x ° x2)
R 1
a(x°x1)(x°x2)d x integrale elementare di tipo lg dopo identit`a dei polinomi ¢ = 0 a(x + b
2a)2
R 1
a(x + 2ab )°2d x integrale elementare di tipo potenza
¢ < 0 a(x + b 2a)2+°¢4a R 4a °¢≥2ax+bp 1 °¢ ¥2
+1d x integrale elementare di tipo arctg
Integrazione di funzioni razionali con denominatore di ordine superiore al secondo Si considerano due polinomi P, Q tali che degP < deg Q = n. Ricordiamo che un polinomio
Q(x) = a0+ · · · + anxn
con coe±cienti reali a0, . . . , an2 R, an 6= 0. si pu`o decomporre nel modo seguente:
Q(x) = an(x ° x1)h1· · · (x ° xp)hp(x2+ b1x + c1)k1· · · (x2+ bqx + cq)kq
dove x1, . . . , xp sono le radici reali di P aventi rispettivamente molteplicit`a h1, . . . , hp, e k1, . . . , kq
sono le molteplicit`a delle radici complesse coniugate dei termini x2+ b
1x + c1, . . . , x2+ bqx + cq con
¢1 = b21° 4c1 < 0, . . . , ¢q= b2q° 4cq< 0. Inoltre
h1+ · · · + hp+ 2(k1+ · · · + kq) = n.
Riduzione in fratti semplici. Si possono trovare n numeri reali
A1,1, . . . , A1,h1. . . , Ap,1, . . . , Ap,hpB1,1, C1,1, . . . , B1,k1, C1,k1, . . . , Bl,1, Cl,1, . . . , Bl,kq, Cl,kq tali che P (x) Q(x) = A1,1 x° x1 + A1,2 (x ° x1)2 + · · · + A1,h1 (x ° x1)h1 + · · · + Ap,1 x° xp + Ap,2 (x ° xp)2 + · · · + Ap,hp (x ° xp)hp + +B1,1x + C1,1 x2+ b 1x + c1 + B1,2x + C1,2 (x2+ b 1x + c1)2 + · · · + B1,k1x + C1,k1 (x2+ b 1x + c1)k1 + + · · · + Bq,1x+ Cq,1 x2+ b qx + cq + Bq,2x+ Cq,2 (x2+ b qx + cq)2 + · · · + Bq,kqx + Cq,kq (x2+ b qx + cq)kq
Formula di Hermite. Esistono delle costanti
A1, ..., Ap, B1, C1, ..., Bq, Cq
e un polinomio P1 tale che degP1 = n ° p ° 2q ° 1 tali che:
P (x) Q(x) = A1 x° x1 + A2 x° x2 + · · · + Ah x° xh + + B1x + C1 x2+ b 1x + c1 + B2x + C2 x2+ b 2x + c2 + · · · + Bqx + Cq x2+ b qx + cq + d dx µ P1(x) (x ° x1)h1°1· · · (x ° xh)hp°1(x2+ b1x + a1)k1°1· · · (x2+ bqx + cq)kq°1 ∂
Integrazione per sostituzione per funzioni composte con funzioni razionali Dalla regola di derivazione delle funzioni composte otteniamo che
Z
f ('(x))'0(x) d x = Z
f (t) d t. essendo '(x) = t.
Indichiamo con R(f1, . . . , fk) una funzione razionale, cio`e il rapporto di due polinomi nelle variabili
f1, . . . , fk.
Nella successiva tabella riportiamo ALCUNE sostituzioni che riconducono un integrale in cui com-paiono funzioni trascendenti o irrazionali ad integrale di quoziente di polinomi
integrale assegnato sostituzione consigliata integrale ottenuto
R R(lg x) x d x t = lg x R R(t) d t R R(xÆ)xÆ°1d x t = xÆ 1 Æ°1 R R(t) d t R R(cos(x))senx d x t = cos x °R R(t) d t R
R(sen(x)) cos x d x t = senx RR(t) d t
R R(ax) d x ax= t 1 lg a R R(t)1 td t R R(senx, cos x) d x t = tgx/2 RR≥t22t+1,1°t 2 1+t2 ¥ 2 1+t2 d t R
R(sen2x, cos2x, senx cos x, tgx) d x t = tgx . . .
Funzioni razionali con argomento irrazionale. Regola generale Siano Æ, Ø, ∞, ± 2 R con Ʊ ° ∞Ø 6= 0 (oppure Æ = ∞ = 1 e Ø = ± = 0). Siano m1, . . . , mk, n1, . . . , nk 2 N§ con mi/ni ridotto ai minimi termini.
Per l’integrale Z R √ x, µ Æx + Ø ∞x + ± ∂m1/n1 , . . . , µ Æx + Ø ∞x + ± ∂mk/nk! d x `e opportuna la sostituzione tµ= µ Æx + Ø ∞x + ± ∂ , µ = m.c.m{n1, . . . , nk}.
In tabella riportiamo particolari casi della precedente formula
integrale sostituzione R R°x, mp ax + b¢ d x ax + b = tm R R°x, xm1/n1, . . . , xmk/nk¢ d x tµ= x µ = m.c.m{n 1, . . . , nk} R R≥x, mqax+b cx+d ¥ d x tm = ax+b cx+d
Notiamo che altre sostituzioni solo altrettanto convenienti. Ad esempio per Z
R≥x,pa2° x2¥d x si pu`o usare x = asent
Inoltre possiamo trattare casi in cui l’argomento della radice non sia sempre lo stesso. Ad esempio per Z
R(x,pax + b,pcx + d) d x usare la sostituzione pax + b = t che riporta ad irrazionali di trinomi di secondo grado che ora discutiamo.
integrale a > 0, ¢ 6= 0 segno di ¢ sostituzione
R R≥x,pax2+ bx + c¥d x ¢ 6= 0 pa(t° x) =pax2+ bx + c R R≥x,p°ax2+ bx + c¥d x ¢ > 0, radici x 1, x2 t = q ax2°x x°x1 DiÆerenziali Binomi Z xm(axp+ b)q d x, m, p, q 2 Q. Tale integrale `e razionalizzabile nei seguenti casi ponendo t = xp:
• q 2 Z • m+1p 2 Z
• m+1
p + q 2 Z
OSSERVAZIONE Per quanto dettagliate possano essere le tavole degli integrali... la maggiorparte delle funzioni NON ammettono una primitiva che abbia una espressione analitica esplicita come quella cercata in queste tavole!
Logaritmi
Definizione 1 Siano b, x 2 R , b > 0 , b 6= 1 , x > 0 . Il logaritmo in base a di x , indicato con logax , `e il numero reale y tale che x = by. In altre
parole
logbx = y () x = by
Il logaritmo naturale, o neperiano, di x , indicato con ln x , `e il logaritmo in base e di x , ossia ln x := logex .
Definizione 2 La funzione logaritmo di base b `e la funzione logb( ) : (0, +1) ! R che ad ogni numero reale positivo x associa logax .
loga1 = 0 , logaa = 1 , alogab = b
logab = 1 logba
loga(xy) = logax + logay (x, y > 0) loga x y = logax logay (x, y > 0) logax↵ = ↵ logax (x > 0, ↵2 R) loga n p x = 1 nlogax (x > 0, n2 N \ {0}) loga↵x = 1 ↵logax (x > 0, ↵2 R) log1 a x = logax logabx = 1 1 logax + 1 logbx , loga b x = 1 1 logax 1 logbx logab = logcb
logcb = logcb· logac d dxlogbx = 1 ln b · 1 x, d dxln x = 1 x Logaritmi 1
Funzioni circolari sin x =X n 0 ( 1)n x 2n+1 (2n + 1)! cos x =X n 0 ( 1)n x 2n (2n)! tan x = sin x cos x ctg x = cos x sin x Relazione fondamentale sin2x + cos2x = 1 Formule di addizione e sottrazione
sin(x± y) = sin x · cos y ± cos x · sin y cos(x± y) = cos x · cos y ⌥ sin x · sin y
tan(x± y) = tan x± tan y 1⌥ tan x · tan y ctg (x± y) = ctg x· ctg y ⌥ 1 ctg y± ctg x Formule di duplicazione
sin 2x = 2 sin x· cos x
cos 2x = cos2x sin2x = 2 cos2x 1 = 1 2 sin2x tan 2x = 2 tan x 1 tan2x ctg 2x = ctg 2x 1 2 ctg x Formule di bisezione 1
sinx 2 =± 1 cos x 2 cosx 2 =± r 1 + cos x 2 tanx 2 =± r 1 cos x 1 + cos x ctgx 2 =± r 1 + cos x 1 cos x Formule di prostaferesi
sin x + sin y = 2 sinx + y 2 · cos
x y 2 sin x sin y = 2 cosx + y
2 · sin x y
2 cos x + cos y = 2 cosx + y
2 · cos x y
2 cos x cos y = 2 sinx + y
2 · sin x y
2 tan x + tan y = sin(x + y)
cos x· cos y tan x tan y = sin(x y)
cos x· cos y ctg x + ctg y = sin(x + y) sin x· sin y ctg x ctg y = sin(x y) sin x· sin y Formule di Werner sin x· sin y = 1
2 [cos(x y) cos(x + y)] sin x· cos y = 1
2 [sin(x + y) + sin(x y)] cos x· sin y = 1
2 [cos(x + y) + cos(x y)] 2
2 x6= (2n + 1) ⇡, n 2 Z) sin x = 2t 1 + t2 , cos x = 1 + t2 1 + t2 3