Scuola di Ingegneria Industriale e dell’Informazione
Corso di Laurea Magistrale in Ingegneria Elettronica
Antenna Bow-Tie con riflettore in metamateriale per
applicazioni GNSS
Relatore: prof. Michele D’Amico
Tesi di Laurea Magistrale di: Stefano PAROLO
Matr. 823577
Introduzione iii 1 Sistemi di geoposizionamento satellitare - GNSS 1
1.1 GPS-Global Positioning System . . . 1
1.1.1 Principio di funzionamento . . . 2
1.1.2 GPS: struttura del segnale . . . 4
1.2 Tecniche di posizionamento . . . 5
1.2.1 Misure a Pseudo-Range . . . 5
1.2.2 Misure di fase della portante . . . 6
1.2.3 Misure combinate e tecniche differenziali e assistite . . . . 7
1.3 Effetti nella Radiopropagazione . . . 7
1.3.1 Effetti atmosferici . . . 8
1.3.2 Effetto Doppler . . . 9
1.3.3 Percorsi multipli e ombreggiamento . . . 9
1.3.4 Effetti della relatività . . . 10
2 Parametri antenne 11 2.1 Definizioni . . . 11
2.1.1 Condizioni di campo lontano . . . 11
2.2 Antenne trasmittenti . . . 13
2.2.1 Guadagno direttivo e direttività . . . 15
2.2.2 Guadagno, grado di adattamento, rendimento . . . 17
2.2.3 Resistenza di radiazione . . . 17
2.3 Antenne riceventi . . . 18
2.3.1 Area efficace . . . 19
2.3.2 Lunghezza efficace . . . 19
2.4 Collegamento tra antenne . . . 20
2.5 Polarizzazione . . . 21
2.5.1 Antenne GNSS con polarizzazione circolare . . . 22
2.6 Fase dell’antenna e centro di fase . . . 23
2.6.1 Antenne GNSS e stabilità del centro di fase . . . 23
2.7 Diagramma di Radiazione . . . 24
2.7.1 Lobi del diagramma di radiazione . . . 24
2.8 Applicazioni Multiband e Broadband . . . 25
2.8.1 Bande multiple . . . 25
2.8.2 Applicazioni multi-modali . . . 25 2.9 Immunità ai disturbi dovuti a percorsi multipli e ombreggiamento 26
2.10 Adattamento di impedenza . . . 26
2.10.1 Interfaccia tra antenna e linea di trasmissione . . . 26
2.10.2 Impedenza d’antenna . . . 28
3 Metamateriali 30 3.1 Onde di superficie . . . 31
3.1.1 Modi di superficie TM . . . 32
3.1.2 Modi di superficie TE . . . 34
3.1.3 Onde di superficie su piani metallici . . . 35
3.2 Modello a impedenza superficiale . . . 36
3.2.1 Modello a linea di trasmissione . . . 37
3.3 Teoria delle corrugazioni metalliche . . . 41
3.3.1 Onde piane e corrugazioni metalliche . . . 42
3.3.2 Onde di superficie e superfici corrugate piane . . . 43
3.3.3 Superfici corrugate in piani riflettori per antenne GNSS . . 45
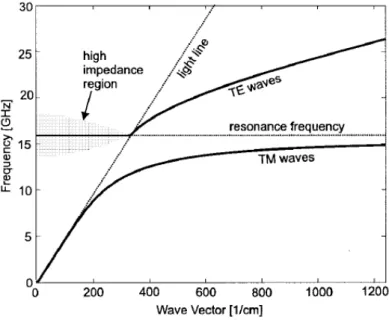
3.4 Superfici ad alta impedenza . . . 46
3.4.1 Onde di superficie e piano ad alta impedenza . . . 47
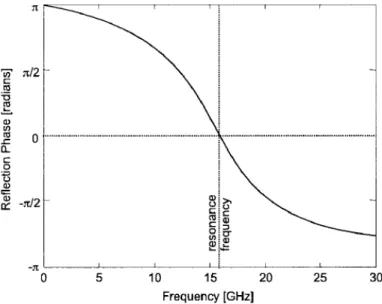
3.4.2 Fase riflessa . . . 49
3.4.3 Banda di radiazione . . . 50
3.4.4 Limite di validità del modello a impedenza superficiale . . 52
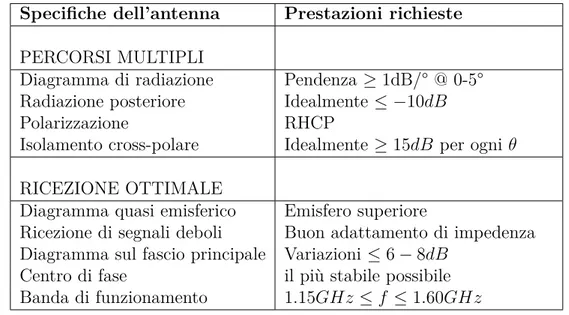
4 Progetto e simulazioni in HFSS 54 4.1 Specifiche di progetto . . . 54
4.2 Antenna Bowtie Turnstile Droopy . . . 55
4.2.1 Piano riflettente conduttore infinito . . . 56
4.2.2 Piano riflettente conduttore reale finito . . . 56
4.2.3 Lobi posteriori e propagazione di onde di superficie . . . . 56
4.2.4 Droop Angle β . . . 57
4.2.5 Parametri di progetto . . . 57
4.3 Bowtie Turnstile Droopy con piano conduttore . . . 59
4.3.1 Alimentazione . . . 60
4.3.2 Return Loss . . . 61
4.3.3 Guadagno totale . . . 62
4.3.4 Guadagno RHCP e isolamento cross-polare . . . 62
4.4 Bowtie Turnstile Droopy con piano in metamateriale . . . 64
4.4.1 HFSS Periodic Boundary Conditions . . . 65
4.4.2 Fase riflessa . . . 66
4.4.3 Piano in metamateriale tipo 1 . . . 67
4.4.4 Piano in metamateriale tipo 2 . . . 69
4.4.5 Bowtie e piano in metamateriale tipo 1 . . . 70
4.4.6 Bowtie e piano in metamateriale tipo 2 . . . 77
Nuove applicazioni dei sistemi di geo-posizionamento globale (GNSS) richiedono innovazioni tecnologiche che consentano di effettuare il posizionamento in tempo reale e quasi-reale, con tempistiche di acquisizione dei dati nell’ordine di qualche secondo. Questo rapido tasso di osservazione consente l’analisi di molti fenomeni dinamici che si incontrano spesso in Geodesia e Scienze Atmosferiche [1]. A titolo d’esempio, nel campo della sismologia GPS, la capacità di rilevare e tracciare la rapida propagazione delle onde sismiche attraverso interi continenti con reti di stazioni permanenti GPS e ricevitori che acquisiscono dati a una frequenza di 1Hz (GPS ad alta velocità), può fornire nuove preziose informazioni sui processi sismici e sulle eruzioni vulcaniche.
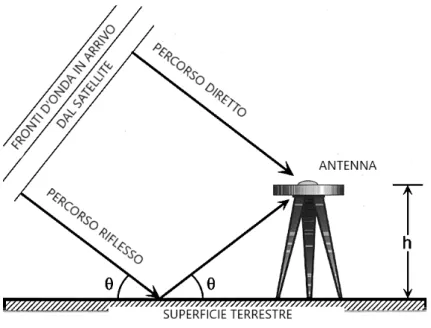
Una delle principali fonti di errore nel geo-posizionamento ad alta precisione è l’interferenza delle riflessioni multiple con il segnale diretto proveniente dai satelliti, problema anche identificato con il termine interferenza multipercorso [2].
Una varietà di tecniche sono state sviluppate per mitigare gli errori dovuti ai percorsi multipli. Per ritardi dovuti a percorsi riflessi molto lunghi, il ricevitore stesso è in grado di riconoscere il segnale GPS ritardato (riflesso) e quindi scar-tarlo. Tuttavia, i percorsi multipli brevi, dovuti a segnali riflessi dal terreno o da altri riflettori nelle vicinanze, sono più difficili da filtrare, perché interferiscono con il segnale GPS diretto, causando effetti quasi indistinguibili dalle normali fluttuazioni nel ritardo atmosferico.
Per osservazioni effettuate su 24 ore, gli effetti dei percorsi multipli a volte possono essere rimossi in post elaborazione. Tuttavia, per misure dipendenti dal tempo eseguite su intervalli di pochi secondi (quasi in tempo reale) o in tempo reale (cioè senza post elaborazione), un modo efficace per eliminare l’effetto dei percorsi multipli è costituito dal reiettare i segnali riflessi in ricezione, usando un’antenna ricevente dotata di un piano di massa progettato per eliminare o ridurre gli effetti di più riflessioni dal terreno o da oggetti vicini (ad esempio alberi, edifici o strutture in metallo). Metodologie alternative includono il progetto di schiere di antenne GPS [1].
Lo stato dell’arte per questo tipo di antenne è costituito dai cosiddetti choke
rings. Questo tipo di antenne sono utilizzate per reti di ricevitori GPS per studi
geodinamici. Queste antenne hanno prestazioni insuperate in termini di mitiga-zione degli effetti dovuti ai percorsi multipli e vengono utilizzate da più di due decenni nelle applicazioni di geodesia.
In questo elaborato si presenta una alternativa ai piani riflettori con choke rings. Viene presentato un piano riflettore in metamateriale, in grado di
soppri-mere i segnali riflessi entro una banda di funzionamento proibita, consentendo di mitigare gli effetti dei percorsi multipli sul segnale diretto.
In particolare si cerca di proporre una soluzione che soddisfi le esigenze in termini di banda di funzionamento estesa introdotte dai nuovi sistemi GPS mo-dernizzato e GALILEO.
Nel capitolo 1 viene introdotto il principio di funzionamento dei sistemi GNSS, con particolare attenzione al tipo di onde elettromagnetiche impiegate nella tra-smissione. Viene poi presentato un approfondimento sugli effetti dovuti alla radiopropagazione sul segnale.
Nel capitolo 2 sono descritti alcuni parametri utili per lo studio e la proget-tazione delle antenne in generale e per applicazioni GNSS ad elevata precisione. Particolare attenzione viene data alle difficoltà di progetto legate agli effetti sulla radiopropagazione descritti nel capitolo 1.
Nel capitolo 3 vengono introdotti i metamateriali. Un approfondimento sulle onde superficiali consente di valutare l’apporto benefico di un piano con banda proibita ad impedenza superficiale elevata nella soppressione delle stesse. Viene poi presentato il piano corrugato ed infine il piano ad elevata impedenza utilizzato per il progetto dell’antenna nel capitolo 4.
Nel capitolo 4 viene proposto il progetto e la simulazione dell’antenna per applicazioni GNSS ad elevata precisione. La radiazione su larga banda con pola-rizzazione circolare è realizzata tramite l’antenna bowtie-turnstile. La soppressio-ne delle onde di superficie, quindi la mitigaziosoppressio-ne degli effetti dovuti ai percorsi, è ottenuta tramite l’utilizzo di un piano riflettore in metasuperficie ad elevata impedenza. Lo studio mette a confronto lo stesso elemento radiante, l’antenna bowtie-turnstile, posto in prossimità di un piano riflettore metallico e in prossimi-tà di un piano in metasuperficie. Si valutano vantaggi e svantaggi della soluzione proposta, anche nell’ottica di un confronto con antenne in commercio allo stato dell’arte.
Sistemi di geoposizionamento
satellitare - GNSS
I sistemi di geo-posizionamento satellitare, denominati GNSS (Global Naviga-tion Satellite System) costituiscono un pilastro tecnologico nella società di oggi insieme a Internet e alle comunicazioni mobili. Essi offrono un’ampia gamma di servizi quali navigazione, posizionamento, sicurezza pubblica e sorveglianza, rilevamenti geografici, riferimenti temporali standard, mappatura, informazioni meteo e atmosferiche [3].
I moderni ricevitori GNSS sono caratterizzati da complessità sempre crescente dovuta all’integrazione di diversi servizi GNSS sullo stesso dispositivo, alla minia-turizzazione dei dispositivi e al degrado delle prestazioni causato dalla presenza dell’utente e dell’ambiente circostante [3]. L’antenna è uno degli elementi più im-portanti di un ricevitore GNSS, specialmente in applicazioni in cui l’accuratezza di misura richiesta nella localizzazione è dell’ordine dei millimetri o addirittura inferiore.
I servizi di geoposizionamento satellitare sono offerti da diversi sistemi, com-prendenti strutture di monitoraggio terrestri e flotte di satelliti che gravitano nell’orbita terrestre media (MEO) a una distanza dalla terra che spazia dai dieci-mila ai quarantadieci-mila km. I principali sono: “GPS” (Global Positioning System) di proprietà del governo degli Stati Uniti [4], il sistema russo “GLONASS” (GLO-bal NAvigation Satellite System) e “Galileo”, sviluppato da Unione Europea e Agenzia Spaziale Europea, in fase di completamento[5]. Vi sono inoltre sistemi a copertura regionale-globale indipendenti, anch’essi in fase di sviluppo, come il cinese “Compass” e il giapponese “QZSS” (Quasi-Zenith Satellite System) [6].
1.1
GPS-Global Positioning System
Per semplicità di trattazione in seguito ci riferiremo al solo sistema GPS, poiché il principio di funzionamento è il medesimo per tutti i sistemi GNSS. Il sistema GPS è un sistema di geoposizionamento satellitare di proprietà del governo degli Stati Uniti d’America. È costituito da tre segmenti (fig.1.1):
• Il segmento di controllo • Il segmento utilizzatore
Figura 1.1 Segmenti dei sistemi GNSS
Il segmento spaziale consiste di una costellazione di satelliti con orbita ap-prossimativamente circolare posta a un’altezza di circa 20200km dalla terra e un periodo di rivoluzione di circa 12 ore siderali. La presente costellazione nominale consiste di 24 satelliti operativi impiegati in sei piani equamente spaziati, con inclinazione di 55° e quattro satelliti per piano. Inoltre altri satelliti sparsi sono solitamente attivi per sostituirne altri in caso di malfunzionamenti. Con la com-pleta costellazione, il segmento spaziale fornisce piena copertura globale con la presenza di minimo quattro fino a otto satelliti simultaneamente osservabili sopra i 15° di elevazione, in ogni istante, durante tutto il giorno.
Il segmento di controllo consiste di una rete di strutture terrestri che ha il compito di tracciare i satelliti, monitorare le loro trasmissioni, effettuare analisi e inviare comandi e dati al satellite. È costituito di una stazione di controllo “master”, stazioni di monitoraggio e antenne terrestri.
Il segmento utilizzatore consiste nell’insieme di tutti gli apparati che utilizzano il segnale GPS[4].
1.1.1
Principio di funzionamento
Il posizionamento dell’utente avviene tramite trilaterazione. La posizione di cia-scun satellite è precisa e nota, monitorata dal segmento di controllo. A bordo di ogni satellite è installato un orologio atomico ad altissima precisione. L’on-da elettromagnetica trasmessa viaggia a velocità nota, la velocità della luce. Il ricevitore ha quindi a disposizione tre informazioni fondamentali, ovvero:
• il tempo impiegato dall’onda per raggiungere l’antenna ricevente dall’istante in cui viene emessa dal satellite ∆t,
• la velocità di propagazione dell’onda c = 3 × 108m/s.
La distanza Di tra satellite e ricevitore è Di = c · ∆t. L’utente si trova in un
qualunque punto su una sfera centrata sul satellite, di raggio Di pari alla distanza
tra esso e il ricevitore. Nota la distanza da tre satelliti e intersecando quindi le tre sfere di raggio stimato, ottengo due punti, il ricevitore si trova sicuramente nel punto più vicino alla terra. Per localizzare precisamente un utente, in condizioni ottimali, sono sufficienti 4 satelliti, tre per la localizzazione spaziale e uno per la temporizzazione precisa [4].
Sul ricevitore terrestre, per ragioni di costo, è installato un semplice orologio al quarzo, per cui conosce il tempo assoluto con un errore ∆t0. La distanza
stimata tra satellite e ricevitore deve quindi essere corretta in questo modo:
Ri = Di + c · ∆t0 =
q
(xi− ux)2+ (yi− uy)2+ (zi− uz)2+ c · ∆t0 (1.1)
Figura 1.2 Posizionamento dell’utente (ux, uy, uz)
Il ricevitore deve risolvere il seguente sistema di equazioni comprendenti le distanze stimate da almeno 4 satelliti, R1, R2, R3, R4:
R1 = q (x1− ux)2+ (y1− uy)2+ (z1− uz)2+ c · ∆t0 R2 = q (x2− ux)2+ (y2− uy)2+ (z2− uz)2+ c · ∆t0 R3 = q (x3− ux)2+ (y3− uy)2+ (z3− uz)2+ c · ∆t0 R4 = q (x4− ux)2+ (y4− uy)2+ (z4− uz)2+ c · ∆t0 (1.2)
1.1.2
GPS: struttura del segnale
Il collegamento (Link) da satellite a utilizzatore avviene su due distinti canali, denominati L1 e L2. Vengono utilizzate due onde a radiofrequenza caratterizzate da polarizzazione circolare destra (RHCP) [4].
Entrambi i canali radio L1 e L2 sono modulati con tecnica BPSK (Binary Phase Shift Keying), ovvero l’informazione è codificata nella fase della portante. Per realizzare l’accesso multiplo di tutti i satelliti allo stesso canale viene utilizzato il protocollo CDMA (Code Division Multiple Access). [7]
I due canali offrono servizi di posizionamento diversificati per utilizzo civile o militare, definiti:
• Standard Positioning Service (SPS) – offre accesso illimitato agli utenti utilizzando la sola banda L1 = 1575.42MHz
• Precision Positioning Service (PPS) – accesso ristretto a soli utenti autoriz-zati, è utilizzato per scopi militari dal dipartimento della difesa statunitense e utilizza entrambe le bande L1 = 1575.42MHz e L2 = 1227.6MHz. Standard Positioning Service - SPS
Per la modalità standard (SPS) viene utilizzata solo la portante L1. Modulato su L1 viene trasmesso in continuazione il codice di espansione di banda CDMA, lungo 1023 bit e denominato C/A (Coarse/Acquisition). Questo codice viene trasmesso ogni millisecondo, avendo quindi un bit-rate di 1.023Mbit/s. Si ricava che lo spettro del segnale modulato è di 2.046MHz, centrato sulla frequenza L1 [3].
Il codice di espansione CDMA è modulato a sua volta da un lungo mes-saggio di navigazione con ridotto bit-rate (50bit/s) costituito dalle informazioni precise sulla posizione e temporizzazione del satellite in trasmissione più un al-manacco contenente informazioni su tutta la costellazione e anche un modello matematico attuale del ritardo di ionosfera (indispensabile ai ricevitori che sfrut-tano il solo canale L1 per correggere l’errore di stima della distanza introdotto dall’attraversamento della ionosfera).
Per ottenere il completo contenuto del messaggio di navigazione è necessaria la trasmissione di 25 pacchetti di dati, scaricabili in 12.5 minuti. Dopo che il contenuto del messaggio è stato elaborato, le misure sono disponibili ogni 6 secondi.
Il ricevitore, dopo aver elaborato il messaggio di navigazione, conosce infine esattamente la posizione del satellite e l’istante in cui ogni sezione successiva del messaggio verrà inviata dal satellite.
Precision Positioning Service - PPS
La modalità di posizionamento ad alta precisione (PPS), utilizza entrambi i canali L1 e L2 per trasmettere due diversi codici di espansione di banda CDMA. Su entrambi i canali il chip-rate è di 10.23 Mbit/s con una banda del segnale di 20.46 MHz. Questa modalità è riservata a utilizzi militari e i codici di espansione
possono essere criptati, in modo che solo tramite equipaggiamento specifico è possibile decifrarli e decodificare il messaggio di navigazione[4].
1.2
Tecniche di posizionamento
In base al tipo di applicazione e alla precisione di posizionamento richiesta, esisto-no varie tecniche con cui il ricevitore può stimare la distanza utente-satellite. I ri-cevitori che consentono precisione di posizionamento maggiore sono caratterizzati da complessità e costo maggiore.
1.2.1
Misure a Pseudo-Range
Questa tecnica di misura della distanza satellite-utilizzatore viene utilizzata dai sistemi civili utilizzando il solo canale L1, oppure da sistemi militari utilizzando entrambi L1 e L2 (figura 1.3).
Figura 1.3 Posizionamento con misure a pseudo-range
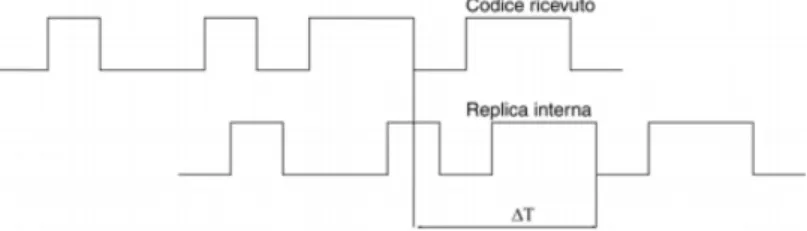
Il ricevitore inizialmente identifica il satellite (mediante il codice C/A), viene conseguentemente caricata nel correlatore CDMA interno al ricevitore una replica del codice di espansione caratteristico del satellite. Il ricevitore effettua quindi una correlazione fra codice generato dall’oscillatore interno e codice ricevuto, ritardando di un bit alla volta finché viene raggiunta la massima correlazione tra i due segnali. Il ritardo tra la replica nel ricevitore e il segnale ricevuto corrisponde esattamente al ritardo di propagazione dell’onda (figura 1.4) [8].
Questo tipo di temporizzazione è detto Phase Timing poiché cerca di far com-baciare la fase del codice riprodotto dal ricevitore con quella del segnale ricevuto dall’antenna[3]. Il Baud-Rate del segnale è di 1.023MHz (quindi il periodo è circa un microsecondo) e l’accuratezza di fase con cui i due segnali possono essere accoppiati è di circa l’1% del periodo. Ne consegue che l’accuratezza con cui viene calcolato il tempo di propagazione è di circa ±10ns che corrispondono a un’incertezza su ogni misura fatta di circa ±3m [3].
1.2.2
Misure di fase della portante
L’osservazione a Pseudo Range è una misura di differenza di stato fra codice bi-nario ricevuto dal satellite e un uguale codice generato internamente al ricevitore. Analogamente può essere effettuata un’osservazione di differenza di fase in cicli fra portante ricevuta dal satellite (ad es. L1) e una sinusoide di uguale frequenza f generata da un oscillatore interno al ricevitore [8].
Figura 1.5 Misure di fase della postante
L’informazione sulla fase della portante consente di ricavare una temporizza-zione migliore del fronte del segnale pseudo-random in arrivo, consentendo un posizionamento molto più preciso della tecnica di misure a Pseudo-Range [3].
Tuttavia questa tecnica da sola non consente di localizzare l’utente, poiché manca l’informazione sul numero di cicli d’onda intercorsi tra satellite e ricevitore [8] (figura 1.6).
Il segnale portante compie un determinato numero di cicli N dal momento in cui viene trasmesso al momento della ricezione, questo numero di cicli non è noto e la sua conoscenza è fondamentale per la stima esatta della distanza satellite-utente. Se questa ambiguità sul numero di cicli dell’onda, detta carrier
cycle integer ambiguity, può essere determinata, tramite la misura della fase della
portante si possono ottenere accuratezze dell’ordine del millimetro [8].
In questo elaborato si considera un’antenna di tipologia adatta alle misure di fase di portante.
1.2.3
Misure combinate e tecniche differenziali e assistite
Molto spesso il posizionamento tramite GPS avviene combinando le diverse tec-niche. In generale la stima della distanza avviene tramite misura a pseudo-range e poi raffinata con misure di fase di portante (Per antenne ad elevata precisione) [8]. Le tecniche utilizzate dai sistemi DGPS (Differential GPS) utilizzano invece più antenne di cui una in posizione precisamente nota ed effettuano una misu-ra differenziale, più immune dai disturbi introdotti nella propagazione. Spesso inoltre il sistema GPS è assistito da informazioni provenienti da altri sistemi di comunicazione (AGPS), quali i sistemi mobili cellulari, per velocizzare i tempi di posizionamento [3].
1.3
Effetti nella Radiopropagazione
La propagazione delle onde elettromagnetiche dai satelliti al ricevitore, avviene attraverso gli strati dell’atmosfera terrestre. Ciascuno strato è caratterizzato da comportamenti elettrodinamici molto diversi, che creano effetti di rifrazione e riflessione talvolta molto complessi da analizzare. Una buona conoscenza della natura di questi effetti è necessaria per il progetto dell’antenna.
Dopo aver attraversato l’atmosfera e averne subito gli effetti, l’onda raggiunge il suolo e qui viene influenzata e deformata dalla struttura dell’ambiente circostante. Le riflessioni e rifrazioni terrestri causano effetti deleteri sul posizionamento. Gli effetti principali nella radiopropagazione sono:
1.3.1
Effetti atmosferici
In assenza di atmosfera il segnale si muoverebbe con velocità costante c = 3 · 108m/s lungo tutto il tragitto. Nell’atmosfera terrestre, la velocità di
propaga-zione del segnale subisce variazioni dovute allo stato fisico del mezzo attraversato. Questo fenomeno (indicato come disturbo o ritardo atmosferico) deve essere con-siderato nell’equazione di misura, poiché il disturbo atmosferico ha sempre entità superiore a 5 metri e può arrivare anche a 200 metri [8].
Gli strati atmosferici di interesse per i segnali GNSS sono Ionosfera e Tropo-sfera. Il segnale attraversandoli viene distorto e indebolito, ciò causa errori di navigazione.
Curvatura del percorso
Qualunque segnale elettromagnetico, nell’attraversare un mezzo, segue il percor-so di minimo tempo (legge di Fermat) che non necessariamente coincide con la distanza geometrica [8]. Il segnale GPS proveniente da un satellite al ricevitore ha seguito un percorso curvo, ovvero geometricamente più lungo della distanza. L’effetto è piccolo e ben modellizzabile per segnali con angoli di elevazione > 10°. Può essere calcolato mediante un modello empirico [8].
Disturbo atmosferico in generale
Il tempo di tragitto del segnale elettromagnetico dipende dalla sua velocità di propagazione v. Nello spazio esterno all’atmosfera questa è costante e uguale a c. Nell’atmosfera viceversa varia da punto a punto: dipende dall’indice di rifrazione del mezzo attraversato [8].
Effetti della Ionosfera
La ionosfera è uno strato dell’atmosfera terrestre caratterizzato dalla presenza di elettroni liberi, atomi e molecole carichi elettricamente (ioni). Si estende da un’altezza di 50 a 1000km ed è caratterizzata dal contenuto totale di elettroni (TEC). Il TEC è influenzato dall’attività solare, da variazioni tra giorno e notte e dal campo magnetico terrestre. Le onde radio che si propagano in questo strato possono subire cambi di polarizzazione, effetto noto come rotazione di
Faraday. Questo effetto può causare la trasformazione di polarizzazioni lineari
in polarizzazioni ellittiche. L’effetto maggiore che la ionosfera ha sui segnali GNSS è uno sfasamento dipendente dalla frequenza (ritardo di gruppo) ovvero la ionosfera è dispersiva in frequenza. È possibile ridurre l’effetto della dispersione nella ionosfera utilizzando due frequenze ben spaziate tra loro. Utilizzando infine uno schema di diversità al ricevitore, è possibile correggere quasi tutti gli effetti introdotti nella propagazione in ionosfera. Per questa ragione il sistema GPS trasmette su due portanti il segnale, L1 = 1575.42MHz e L2 = 1227.60MHz [3].
Effetti della Troposfera
La troposfera si estende dal suolo a un’altezza di circa 50 km ed è non-dispersiva alle frequenze dei segnali GNSS. Ha l’effetto di introdurre un ritardo sulle onde radio dovuto. La ragione di questo ritardo è da ricercarsi nelle differenti con-centrazioni di vapore acqueo nella troposfera, causate dalle diverse condizioni atmosferiche. L’errore risultante è minore dell’errore ionosferico, ma non può es-sere eliminato tramite computazione diretta. Può eses-sere solo approssimato da un modello di calcolo generale [3].
1.3.2
Effetto Doppler
È il ben noto effetto fisico per cui il moto relativo tra trasmettitore e ricevito-re causa uno spostamento apparicevito-rente della fricevito-requenza del segnale ricevuto. Se il trasmettitore si sta avvicinando al ricevitore, verrà registrato un aumento del-la frequenza e vice-versa. Nel caso di trasmissione satellitare GNSS il massimo scostamento è di circa 5kHz, quando il satellite è in avvicinamento o allontana-mento. Il moto del ricevitore causa anche uno lieve scostamento in frequenza. Considerando inoltre un eventuale offset di frequenza sull’oscillatore nel ricevito-re, l’incertezza massima al ricevitore è di circa ±10kHz. Il ricevitore quindi deve ricercare in una banda di 20kHz il segnale GNSS. All’interno di questa banda ogni satellite avrà il suo caratteristico effetto Doppler dipendente dall’orbita e dalla posizione del ricevitore [3].
1.3.3
Percorsi multipli e ombreggiamento
Percorsi multipli
questo effetto ha origine dalla combinazione al ricevitore di più componenti del segnale (echi) con sfasamenti ed attenuazioni differenti [9]. Gli echi sono dovuti a riflessioni, diffrazioni e scattering dell’onda radio incidente su oggetti presenti nelle vicinanze del ricevitore. In alcuni casi si può avere un eco dominante, tipica-mente il raggio diretto tra le due antenne in visibilità, ma in ambienti complessi e caotici come le città, la presenza di grandi strutture può oscurare parzialmente o completamente il percorso diretto con il satellite e in ricezione si combinano solo echi secondari diffusi dall’ambiente (canyoning).
Figura 1.8 Combinazione di percorsi multipli al ricevitore
Ombreggiamento
L’ombreggiamento è dovuto alla presenza di grandi ostacoli e dipende dalla po-sizione del ricevitore [9].
Per ricevitori a misura di fase di portante, ma in generale per i sistemi GPS, i percorsi multipli costituiscono uno dei limiti principali nella precisione del po-sizionamento dell’utente, poiché dipendono fortemente dall’ambiente terrestre in cui viene utilizzata l’antenna e l’errore introdotto non è rimovibile utilizzando modelli empirici universali [3].
1.3.4
Effetti della relatività
Il sistema di riferimento (relativamente) fisso è localizzato nel centro della terra e un sistema di riferimento accelerato è localizzato su ogni satellite. Quindi la teoria della relatività speciale e generale deve essere considerata. Effetti relativi-stici sono rilevanti per le orbite dei satelliti, per la propagazione del segnale dal satellite e per entrambe le temporizzazioni di satellite e ricevitore. Se non fossero opportunamente corrette considerando gli effetti relativistici, le misure sarebbero affette da errore [6].
Parametri antenne
2.1
Definizioni
L’antenna può essere definita come un sistema trasduttore di energia elettroma-gnetica da forma convogliata a forma irradiata e viceversa [10].
L’antenna è trasmittente se la conversione avviene da forma convogliata a for-ma irradiata, attraverso una connessione o sezione elettrica. Nel caso contrario l’antenna funziona da ricevente. Un’antenna ricevente, capta energia da onde vaganti nello spazio e la rende disponibile a una sezione elettrica, definita sezione
di uscita. Nella maggior parte dei casi non vi è differenza a livello strutturale
tra le antenne trasmittenti e riceventi, il medesimo oggetto fisico può funzionare indifferentemente da trasmettente o ricevente e la sua sezione elettrica assolve rispettivamente a ruolo di ingresso o uscita. Si può dimostrare il teorema di re-ciprocità che lega i parametri dell’antenna in trasmissione e in ricezione [10].
2.1.1
Condizioni di campo lontano
Per gli scopi di questo elaborato, è utile descrivere il comportamento dell’an-tenna facendo riferimento ai campi elettromagnetici in regioni di spazio lonta-ne dall’antenna. Si tralasciano i dettagli relativi ai meccanismi di conversiolonta-ne, concentrandosi solo sugli effetti "esterni". Si definiscono punti di osservazione lontani dall’antenna quelli per cui valgono contemporaneamente le seguenti tre condizioni:
• la distanza dal più vicino punto dell’antenna è molto maggiore della lun-ghezza d’onda;
• la distanza dal più vicino punto dell’antenna è molto maggiore della dimen-sione geometrica massima;
• l’angolo "di vista" dell’antenna è molto minore del rapporto tra lunghezza d’onda λ e la dimensione geometrica trasversale massima.
zione.
Scegliendo un sistema di riferimento a coordinate polari, ogni componente di campo lontano radiato da un’antenna può essere scritto, in generale, come:
Eu = E(θ, φ)
e−jkr r u · e
jψ(θ,φ) (2.1)
Consideriamo separatamente le componenti della funzione d’onda descritta dall’equazione (2.1).
• Il termine E(θ, φ) rappresenta le variazioni dell’intensità del campo Eu al
variare degli angoli di elevazione e azimut θ e φ.
• Il termine ψ(θ, φ) rappresenta invece le variazioni della fase del campo irradiato al variare di θ e φ.
• Il termine moltiplicativo e−jkr
r rappresenta la propagazione nella direzione
radiale u.
La condizione di campo lontano comporta una notevole semplificazione di trattazione, che non sempre risulta corretta e per alcuni casi specifici non è ac-cettabile: il fronte d’onda è considerato perfettamente sferico, come sferiche sono quindi le superfici equifase [10].
In questo modo, localmente, l’onda sferica può essere considerata un’onda piana o Trasverso Elettromagnetico (TEM) e la sorgente dell’onda può essere considerata puntiforme.
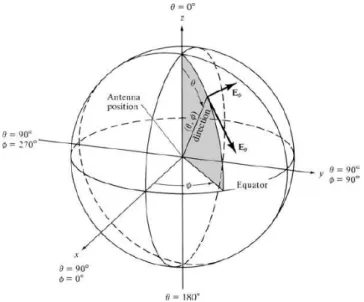
Considerando valida l’ipotesi di sorgente puntiforme, è desiderabile general-mente assegnare all’antenna un sistema di riferimento tale per cui, a una da-ta frequenza, la variazione di fase ψ(θ, φ) risulda-ta indipendente da θ e φ (i.e.
ψ(θ, φ) = costante)
L’origine del sistema di riferimento a coordinate sferiche che rende la fase indipendente rispetto a variazioni di θ e φ è definito centro di fase dell’antenna. Quando riferiti al centro di fase, i campi irradiati dall’antenna sono onde sferiche con fronti d’onda (superfici equifase) ideali. Il centro di fase è quindi il punto dal quale viene considerata emanata la radiazione e i campi irradiati misurati sulla superficie di una sfera il cui centro coincide con il cento di fase hanno la stessa fase.
In pratica per le antenne reali un unico centro di fase valido per tutti i valori di
θe φ non esiste. Il centro di fase reale si muove su una superficie e la sua posizione
dipende dal punto di osservazione. Quando la variazione della posizione del centro di fase è sufficientemente piccola si fa solitamente riferimento a un centro di fase
apparente [11].
Per la maggior parte delle antenne e delle applicazioni radio, questo effetto non costituisce affatto un problema e un centro di fase apparente, ovvero un punto di riferimento ψ(θ, φ) ' costante può essere ricavato, almeno per la maggior parte dello spazio angolare.
In antenne più complesse il centro di fase non è ben definito.È quindi necessa-rio ricavare la dipendenza dagli angoli θ e φ della fase dei campi elettromagnetici
trasmessi. Formulazioni analitiche per ricavare il centro di fase sono spesso mol-to laboriose ed esismol-tono solo per un limitamol-to numero di configurazioni. Sono necessarie misure sperimentali o stime realizzate con simulazioni software. [11].
Per antenne a misura di fase di portante, in sistemi GNSS, la posizione esatta del centro di fase deve essere nota. Al variare dell’angolo di incidenza la stima del-la distanza satellite-utente deve essere corretta anche in funzione deldel-la posizione apparente del centro di fase [12].
Figura 2.1 Sistema di riferimento con origine nel centro di fase
2.2
Antenne trasmittenti
L’energia elettromagnetica, in un antenna trasmittente, entra nel "trasduttore" attraverso la sezione elettrica e viene irradiata nello spazio. La potenza entrante è definita come quella che attraversa la sezione elettrica [10]:
• come prodotto di tensione e corrente nel caso di alimentazione via linea. • come flusso del vettore di Poynting del campo elettromagnetico attraverso
la sezione stessa nel caso più generale di alimentazione anche con guida d’onda.
La potenza uscente in forma di onde è molto più complessa da definire. Per poterla quantificare, scegliamo un sistema di coordinate con polo nell’origine e un centro di fase ideale, e analizziamo la radiazione in condizioni di campo lontano. L’espressione del campo elettromagnetico irradiato (l’insieme di campo elettrico e magnetico) assume, nel caso di spazio omogeneo illimitato, una forma del tipo:
E=√ηe−jβrr [Fθ(θ, φ)uθ+ Fφ(θ, φ)uφ] = −jβr [−F (θ, φ)u + F (θ, φ)u ] (2.2)
uθe uφsono i versori secondo θ e φ. Come descritto in precedenza, l’assunzione
di un centro di fase ideale ci consente di trascurare le variazioni di fase rispetto a θ e φ e di concentrarci sulle caratteristiche legate all’intensità dei campi.
Valgono le seguenti proprietà:
1. E e H sono in ogni istante normali tra loro e perpendicolari alla direzione di radiazione.
2. Il vettore di Poynting è dato dal prodotto vettoriale S = E × H ed è diretto radialmente.
3. I moduli di E e H hanno rapporto costante pari all’impedenza intrinseca del mezzo: |E|
|H| = η =
qµ
0
ε0 = 377Ω.
•µ0 = 4π · 10−7 [Hm] permeabilità magnetica del vuoto;
•ε0 = 8.854 · 10−12 [Fm] costante dielettrica del vuoto.
4. E è in fase con H, ciò significa che i massimi e minimi dei due campi si realizzano nello stesso istante e il vettore di Poynting è puramente reale.
S= S · ur = |E||H| = |E|
2
η = η|H|
2 (2.3)
5. La grandezza S [W
m] è definita densità di potenza, questa definizione è
ap-propriata solo nel caso di campo irradiato a grande distanza dalla sorgente. 6. La propagazione avviene nella direzione in cui la fase ritarda più
rapida-mente, è radiale e si esprime con il termine moltiplicativo e−jβr
r , comune a
entrambe le componenti E e H. Nell’espressione: •β = 2π λ = ω √ µ0ε0 = ωc è la costante di fase, •λ è la lunghezza d’onda [m], •ω = 2πf è la pulsazione [rad s ], •c = 3 × 108[m
s] è la velocità della luce nel vuoto.
7. Poichè ogni componente del campo si ottiene dal rispettivo fasore molti-plicando per √2ejωt ed estraendone la parte reale, ognuna di esse conterrà
un termine moltiplicativo del tipo cos(ωt − βr + ϕ) con ϕ indipendente dal tempo t e dallo spazio r. Questa dipendenza funzionale esprime come è noto una configurazione che trasla lungo r con velocità pari a quella della luce. La separazione temporale tra due zeri è pari a T = 1
f =
2π
ω, mentre la
separazione spaziale è pari a λ = 2π
8. La legge di variazione angolare su una sfera di raggio r è indipendente da r. Il raggio r può essere visto quindi come un semplice "fattore di ampiezza" per quanto riguarda la direzionalità.
9. Evidenziando la dipendenza angolare in S ottengo, per le (2.2) (2.3) :
S(θ, φ) = 1
r2(|Fθ(θ, φ)| 2+ |F
φ(θ, φ)|2) (2.4)
Considerando poi una piccola regione conica di ampiezza δΩ, la superficie intercettata da una sfera di raggio r vale r2δΩ. Se S si può ritenere costante
su tale area il suo flusso vale
Sr2δΩ = |Fθ|2δΩ + |Fφ|2δΩ (2.5)
che non dipende da r poichè il flusso di S su una superficie è generalmente considerato come la potenza che attraversa la superficie stessa. L’espressio-ne sopra esprime il fatto che la potenza convogliata in una geL’espressio-nerica superficie conica si mantiene costante allontanandosi dall’antenna.
10. La potenza totale per unità di angolo solido è data da |Fθ|2 + |Fφ|2 e si
chiama intensità di radiazione. In modo analogo |Fθ|2 e |Fφ|2 presi
singo-larmente esprimono l’intensità di radiazione associata alle due componenti rispettivamente secondo θ e φ.
11. L’equazione (2.5) esprime, in caso di propagazione in mezzo omogeneo, isotropo, non dissipativo:
•Il principio di conservazione dell’energia;
•il fatto che non vi è passaggio di potenza da una regione conica ad un’altra; •il fatto che non vi è passaggio di potenza da un piano di polarizzazione a un altro.
In conclusione, le due funzioni |Fθ| e |Fφ| definiscono totalmente la
radia-zione e cioè il comportamento dell’antenna in uscita.
2.2.1
Guadagno direttivo e direttività
Poiché la densità di potenza trasportata da ciascuna onda emessa dall’antenna è direttamente proporzionale alla potenza totale irradiata dall’antenna stessa, è utile mettere in evidenza tale potenza in modo da separare i parametri pertinenti la sola antenna da quelli pertinenti l’alimentazione. Ciò viene effettuato in genere assumendo come riferimento una antenna isotropa, cioè un’antenna ideale che irradierebbe uniformemente in ogni direzione onde con densità pari a
Si =
Pr
4πr2 (2.6)
dove Pr è la totale potenza irradiata. Rispetto a questo caso una antenna
reale che emetta la stessa potenza globale si troverà a privilegiare alcune direzio-ni rispetto ad altre. La (2.6) deve allora vedirezio-nire intesa come densità di potenza
seconda delle direzioni.
La variazione della densità di potenza S(θ, φ) in ogni punto, rispetto al va-lor medio Si, viene espressa con una funzione direzionale moltiplicativa chiamata
guadagno direttivo.
Tale funzione direzionale è usualmente scritta come prodotto di una funzione normalizzata a valore massimo unitario, detta funzione di direttività per un nu-mero chiamato solitamente direttività o guadagno direttivo massimo.
Dette f(θ, φ) la funzione direttività e D la direttività, la densità di potenza nella generica direzione sarà dunque:
S(θ, φ) = Pr
4πr2·Df(θ, φ) = densità di potenza media·guadagno direttivo (2.7)
Poichè il valor medio di (2.7) su una sfera di raggio r è dato da (2.6) , in-tegrando (2.7) sulla sfera stessa, dividendo per 4πr2 e uguagliando alla (2.6) si
ricava: 1 4π Z Ω Df(θ, φ)dΩ = 1 (2.8)
In cui va ricordato che l’espressione analitica di dΩ è data da dΩ = sin θdθdφ e che l’integrale in (2.8) è un integrale doppio in θ e φ esteso all’intero angolo solido Ω.
Dalla (2.8) ricavo l’espressione della direttività:
D = R 4π
Ωf(θ, φ)dΩ
(2.9) La definizione di densità di potenza nella generica posizione descritta nella (2.7) aiuta a separare, nella (2.4), i termini direzionali tipici dell’antenna da quelli legati alla potenza di alimentazione. Infatti eguagliando la (2.7) alla (2.4) ottengo:
|Fθ|2+ |Fφ|2 =
Pr
4πDf(θ, φ) (2.10)
Poiché Pr
4π è l’intensità media, scrivendo la (2.10) per la direzione di massima
radiazione, ove f(θ, φ)dΩ = 1, si ottiene:
D= intensità massima
intensità media (2.11)
Che può costituire una intuitiva e comoda definizione del concetto di direttività. Si osservi che la direttività è un numero sempre maggiore di 1 e che può essere valutata con sole misure relative (proprietà questa molto importante, perché con-sente di utilizzare una strumentazione di misura per sole misure relative, ovvero di rapporto)
2.2.2
Guadagno, grado di adattamento, rendimento
Normalmente l’antenna, come ogni trasduttore, non irradia tutta la potenza disponibile alla sezione di ingresso. Ciò avviene per due motivi:
• una parte della potenza viene riflessa in direzione del generatore (e non attraversa la sezione);
• una parte viene dissipata in calore.
La quota parte di potenza riflessa è espressa dal coefficiente di riflessione. Ove possibile questo coefficiente viene minimizzato cercando di fare in modo che la linea di alimentazione (o il generatore o la guida d’onda) sia adattata al me-glio, eventualmente con l’aiuto di particolari strutture di interfaccia. Per quanto riguarda la potenza dissipata in calore entro l’antenna (perdite ohmiche o die-lettriche), essa viene specificata con un coefficiente ν detto rendimento. Se nella (2.7) la potenza irradiata viene espressa come prodotto della potenza assorbita P per il rendimento Pr= νP , si ha:
S= P
4πr2νDf(θ, φ) =
P
4πr2Gf(θ, φ) (2.12)
dove si è introdotto il parametro G = νD,detto guadagno d’antenna, che può in-tendersi come rapporto tra la intensità massima e quella che irradierebbe un’an-tenna isotropa senza perdite, pari evidentemente a P
4π. Per antenne
particolar-mente dissipative può succedere che G sia minore di 1.
2.2.3
Resistenza di radiazione
Poiché l’antenna irradia potenza nello spazio, alla sua sezione di ingresso essa si presenterà come una terminazione più o meno adattata, ma mai puramente reattiva. Nel caso di alimentazione diretta da bipolo generatore o tramite una linea sono precisabili univocamente tensione, corrente e impedenza d’ingresso; in tal caso, detta I la corrente, Pr la potenza irradiata, Pp quella perduta per
dissipazione e P = Pr+Ppquella totale assorbita, si possono definire tre resistenze
Rr, Rp e R per modellizzare le potenze irradiata e dissipata, mediante le relazioni:
Rr|I|2 = Pr
Rp|I|2 = Pp
R|I|2 = P
(2.13) dove Rr è detta resistenza di radiazione, Rp è detta resistenza di perdita e R =
Rr+ Rp è la resistenza totale di ingreso del circuito serie equivalente.
È facile verificare che il rendimento ν = Pr
P = Rr
Rr+Rp Nel caso di guida d’onda
il concetto di resistenza di radiazione e di perdita diviene indefinito, a meno di far riferimento a tensioni e correnti convenzionali, sempre possibili, ma da definirsi caso per caso.
Figura 2.2 Circuito serie equivalente di un’antenna trasmittente
2.3
Antenne riceventi
L’energia elettromagnetica, nel caso di una antenna ricevente, viene captata quan-do l’antenna è investita da un’onda (detta incidente), viene convogliata su una linea o una guida d’onda e resa disponibile nella sezione di uscita se sono attuate le condizioni di adattamento. L’onda incidente, considerata ignorando le distor-sioni di campo introdotte dall’antenna stessa, viene sempre considerata di tipo piano TEM; essa è descritta analiticamente dalla forma:
E=√ηe−jβz[Fxux+ Fyuy] H= √1 ηe −jβr[−F yux+ Fxuy] (2.14) Il sistema di riferimento è in questo caso cartesiano e l’asse z coincide con la direzione di propagazione del trasverso elettromagnetico, il piano xy è parallelo ai piani equifase e ovviamente ux, uy sono due versori orientati con gli assi x e
y. Le (2.14) descrivono un’onda piana uniforme (Fx e Fy si suppongono costanti
sul fronte d’onda): essa può identificarsi con la (2.2) per spostamenti trasversi di limitata estensione.
La densità di potenza trasportata vale:
S= E × H (2.15) In cui S = S · uz= |E||H| = |E| 2 η = η|H| 2 = |F x|2+ |Fy|2 (2.16)
Figura 2.3 Circuito serie equivalente di un’antenna ricevente
2.3.1
Area efficace
La potenza disponibile all’uscita di un’antenna ricevente dipende, oltre che dalla densità di potenza e polarizzazione dell’onda incidente, dall’orientamento dell’an-tenna stessa rispetto all’onda. Tale orientamento è individuato dai due angoli θ e φ che definiscono, rispetto all’antenna, la direzione di provenienza dell’onda.
La potenza Pddisponibile alla sezione d’uscita è allora completamente definita
dagli angoli che individuano la direzione di arrivo dell’onda e dalla densità totale di potenza S, a cui evidentemente Pd è proporzionale; la costante di
proporzio-nalità, avente le dimensioni fisiche di un’area, viene scritta convenzionalmente come prodotto di una funzione f(θ, φ) direzionale, normalizzata a valor massimo unitario, per un parametro Ae detto area efficace.
Pd = Ae· f(θ, φ)S (2.17)
Si può dimostrare invocando il teorema di reciprocità, che la funzione direzio-nale f(θ, φ) è la stessa che si ha in trasmissione (in particolare, quindi, la direzione massima di radiazione è pure quella di massima sensibilità). Inoltre, sempre per reciprocità, si trova che il rapporto tra guadagno e area efficace di un’antenna è un parametro invariante per ogni tipo di antenna:
G Ae
= 4π
λ2 (2.18)
Queste proprietà sono di fondamentale importanza e consentono di qualificare un’antenna senza riguardo per il modo in cui viene usata. Il valore della costante (2.18) viene determinato valutando separatamente, per un tipo di antenna ove ciò risulti agevole, G e Ae.
2.3.2
Lunghezza efficace
Per un’antenna ricevente, nel caso siano individuabili tensioni e correnti alla se-zione di uscita, cioè quando l’antenna stessa è prefigurabile come un bipolo attivo,
la tensione a vuoto è funzione dell’orientamento dell’antenna stessa rispetto al-l’onda ed è proporzionale al campo elettrico di quest’ultima. Assumendo per semplicità che il campo elettrico incidente sia polarizzato linearmente e che la sua ampiezza complessa sia E, predisponendo l’antenna nelle migliori condizioni di ricezione [i.e. f(θ, φ) = 1, adattamento di polarizzazione] si può scrivere la suddetta proporzionalità nella forma:
V0 = leE (2.19)
dove V0 è la tensione a vuoto. Il parametro le, che ha le dimensioni di una
lunghezza, è detto lunghezza efficace elettrica dell’antenna. Essendo in generale
V0 una grandezza complessa, il parametro le tiene conto anche della rotazione
di fase tra V0 ed E. Va osservato che l’impedenza di uscita del bipolo attivo
costituito dall’antenna è quella stessa che il bipolo presenta quando si "spengono" i generatori, cioè si fa cessare l’azione dell’onda incidente. Tale impedenza deve quindi identificarsi con quella ricavata per un’antenna trasmittente, ove l’antenna ha il ruolo di bipolo passivo. Pertanto il circuito serie equivalente diviene identico al caso passivo con in serie un generatore di potenza. La potenza disponibile dal generatore serie, cioè estraibile con un carico adattato e risonante con la reattanza X, vale:
Pd =
|V0|2
4R (2.20)
Confrontando quest’ultima equazione (2.20) con (2.17), per f(θ, φ) = 1, si tiene conto, tenendo conto delle espressioni di le e di Ae:
Ae = |le|2
η
4R (2.21)
La relazione (2.21) è fondamentale: essa mette in evidenza un vincolo fra i tre parametri fondamentali di un’antenna ricevente, Ae, le e R, vincolo valido
per qualunque antenna. Si può infine introdurre un parametro concettualmente simile alla lunghezza efficace elettrica, chiamato lunghezza efficace magnetica, che risulta essere duale al parametro elettrico le, essendo definito come rapporto tra
corrente di corto-circuito I0 e forza magnetica incidente.
2.4
Collegamento tra antenne
Si consideri un collegamento hertziano dove sono presenti due antenne generiche, una funzionante da trasmittente e una da ricevente, poste lontane l’una dall’altra nel senso precisato a inizio capitolo. L’onda incidente sulla ricevente si può allora considerare TEM piana e uniforme e si possono applicare i concetti sulla captazio-ne introdotti. Per semplicità si supponga che l’onda incidente sia correttamente polarizzata: in tal caso la potenza disponibile in ricezione vale:
Pd= Arfr(θr, φr)S = Arfr(θr, φr)
P
4πr2Gtft(θt, φt) (2.22)
Dove fr(θr, φr) e ft(θt, φt) sono le funzioni direttività delle due antenne
efficace della ricevente e il guadagno della trasmittente. Esprimendo l’area effica-ce Ar in funzione del guadagno Gr dell’antenna ricevente stesa, posso riscrivere
l’equazione precedente come:
Pd P = Grfr( λ 4πr)2Gtft (2.23) La quantità ( λ 4πr)
2 è detta attenuazione da spazio libero.
La quantità P Gtftè definita EIRP (Effective Isotropic Radiated Power). Non
ha alcun significato fisico, ma è molto comoda e largamente impiegata, poiché senza specificare separatamente i due fattori Gt e P , permette di definire in
modo compiuto le prestazioni energetiche del sistema trasmittente, diventandone una figura di merito.
In modo analogo, nella sezione ricevente, non si impongono particolari prescri-zioni sulla potenza ricevuta, ma sul rapporto segnale-rumore Pd
N. Se la potenza
di rumore N viene espressa in termini di temperatura di rumore T (N = KT B) con K = 1.38 × 10−23[J
K] costante di Boltzmann e B banda del sistema ricevente,
il richiesto rapporto segnale-rumore per un dato valore di intensità incidente, è proporzionale al rapporto Gr
T . Si osservi che T , temperatura riferita ai morsetti di
uscita dell’antenna, ingloba i contributi captati dall’antenna stessa e i contributi generati entro le apparecchiature elettroniche. Se si può prescindere dai contri-buti captati, il fattore temperatura globale può essere controllato con ricevitori a basso rumore. In questo caso, dunque , i due parametri essenziali Gr e T sono
entrambi a disposizione del progettista, il quale può sceglierli arbitrariamente, purché soddisfino il rapporto segnale-rumore richiesto. Gr
T è dunque una cifra di
merito del sistema ricevente in quanto ne definisce totalmente la qualità.
2.5
Polarizzazione
Lo stato di polarizzazione delle onde radio piane uniformi di tipo TEM (valido anche per porzioni di onde sferiche a grande distanza dalla sorgente) può essere descritto facendo riferimento al modo in cui il campo elettrico oscilla sul piano trasverso, ignorando la potenza totale trasportata e badando solo ai rapporti (in generale complessi) che legano le componenti di campo elettromagnetico secon-do determinate direzioni sul piano trasverso [10]. Posso rappresentare il campo elettrico in questo modo:
E = Exux+ Eyuy (2.24) In cui è stato assunto un sistema di riferimento cartesiano in cui l’asse z coin-cide con la direzione di propagazione, mentre le coordinate x e y sono contenute nel piano trasverso. Il campo elettrico generalmente evolve in modo tale che l’e-stremo del vettore descrive un’ellisse nel piano trasverso, si parla in questo caso di polarizzazione ellittica della radioonda. Questa polarizzazione in casi speciali può degenerare in un semplice segmento di retta, generando una polarizzazione
Nella realtà un’onda con polarizzazione perfettamente lineare o circolare è difficilmente realizzabile. Un fattore di merito importante che consente di avere una misura del grado di ellitticità della polarizzazione è il rapporto d’assi o Axial
Ratio (AR), ovvero il rapporto tra gli assi della polarizzazione ellittica dell’onda.
Si definisce polarizzazione caratteristica di una antenna la polarizzazione del-l’onda che l’antenna irradierebbe se l’antenna funzionasse da trasmittente.
Se onda incidente e antenna ricevente hanno la medesima polarizzazione, si dice che tra onda incidente e antenna sussiste adattamento di polarizzazione.
In ogni punto della sfera di radiazione la polarizzazione di un’onda è solita-mente rappresentata con una coppia di polarizzazioni ortogonali [11].
• co-polarizzazione, ovvero la polarizzazione trasmessa o ricevuta per cui è stata progettata l’antenna.
• cross-polarizzazione, ovvero la polarizzazione che risulta essere ortogonale alla co-polarizzazione.
In un collegamento radio, generalmente, la polarizzazione dell’antenna rice-vente non è esattamente la stessa dell’onda incidente: si parla quindi di
disallinea-mento di polarizzazione. La quantità di potenza estratta dal segnale in ingresso
non è massimizzata a causa delle perdite dovute alla polarizzazione. Una even-tuale onda incidente polarizzata ortogonalmente alla polarizzazione caratteristica non avrebbe effetto sull’antenna ricevente. I fattori di merito che consentono di valutare queste perdite sono l’efficienza di polarizzazione e il Polarization Loss
Factor (PLF).
2.5.1
Antenne GNSS con polarizzazione circolare
I satelliti GNSS irradiano un’onda con polarizzazione circolare destra (RHCP). È possibile ottenere notevoli benefici e mitigare le problematiche legate alla ra-diopropagazione utilizzando una polarizzazione circolare.
Per prima cosa, un’onda polarizzata circolarmente aumenta l’efficienza di po-larizzazione dell’antenna ricevente. Massimizzare il segnale ricevuto utilizzando polarizzazioni lineari o ellittiche richiede che l’antenna ricevente sia correttamen-te orientata e allineata rispetto alla direzione di propagazione, per avere adatta-mento di polarizzazione. Utilizzando antenne RHCP al satellite e al ricevitore significa che non è necessario alcun allineamento della polarizzazione, non es-sendoci nessuna direzione preferenziale della polarizzazione dell’onda. Realizzare un’antenna perfettamente RHCP nella realtà è molto difficile. Idealmente vor-remmo AR = 0dB, all’aumentare del suo valore l’adattamento di polarizzazione con l’onda incidente si riduce [12].
In secondo luogo un’onda polarizzata circolarmente è in grado di combattere l’effetto dovuto alla rotazione di Faraday nella Ionosfera. Se una polarizzazione
lineare fosse utilizzata, il segnale potrebbe diventare polarizzato ellitticamente attraversando la ionosfera, variando inoltre l’inclinazione dell’asse maggiore della polarizzazione rispetto alla direzione di propagazione. Un’antenna polarizzata li-nearmente al ricevitore sarebbe quindi in grado di raccogliere soltanto una piccola porzione del segnale incidente. L’utilizzo della polarizzazione circolare offre una certa immunità a questo effetto [3].
In terzo luogo un’onda polarizzata circolarmente può essere utilizzata per ri-gettare i segnali provenienti dai percorsi multipli. Dopo una prima riflessione, le onde con polarizzazione circolare (RHCP nel nostro caso) assumono polarizzazio-ne ortogonale (quindi LHCP). I segnali che dopo una prima riflessiopolarizzazio-ne colpiscono l’antenna hanno quindi polarizzazione LHCP e possono essere individuati e scar-tati. È necessario quindi un buon isolamento cross-polare dell’antenna ricevente, che consenta la corretta ricezione della co-polarizzazione RHCP e un’attenuazio-ne della corrispondente cross-polarizzazioun’attenuazio-ne LHCP.
Questi notevoli vantaggi ottenuti tramite polarizzazione circolare portano con sé lo svantaggio di un progetto molto più complesso rispetto a un’antenna con polarizzazione lineare[3].
2.6
Fase dell’antenna e centro di fase
Come descritto a inizio capitolo, il centro di fase di un’antenna può essere definito come il punto dove si trova la sorgente apparente della radiazione e in generale non corrisponde al centro fisico dell’antenna.
È desiderabile un centro di fase stabile, ma solo una sorgente puntiforme ideale può averlo, poiché produce fronti di fase esattamente sferici. In pratica qualunque sorgente di radiazione di dimensioni finite genera superfici equifase che non sono perfettamente sferiche, ma sono distorte. In questo caso si esaminano porzioni limitate del fronte d’onda per determinare le caratteristiche di fase dell’antenna al variare degli angoli di elevazione e azimut. Il conseguente "movimento" del centro di fase dipende dall’angolo di osservazione.[13].
2.6.1
Antenne GNSS e stabilità del centro di fase
In antenne con polarizzazione circolare, il centro di fase non è ben definito [14]. Per applicazioni GNSS a elevata precisione, le caratteristiche di fase sono di grande importanza.
La stima della distanza tra satellite e ricevitore si basa sulla misura precisa della fase della portante.
Note le posizioni dei centri di fase delle due antenne trasmittente e ricevente, il sistema stima la distanza tra di essi come multiplo delle rotazioni di fase realizzate dal fronte d’onda nel percorrere lo spazio che intercorre tra essi.
I riferimenti per la stima sono quindi proprio i centri di fase di entrambe le antenne. Inoltre è necessario tenere traccia di diversi satelliti
contemporanea-mente e ogni satellite si trova a un diverso angolo di elevazione e azimut rispetto al ricevitore.
Variazioni del centro di fase dell’antenna ricevente in funzione dell’angolo di illuminazione danno quindi origine a errori di posizionamento. Angoli diversi di azimut danno origine a errori sul piano orizzontale, mentre angoli di elevazione diversi danno origine a errori di altitudine. Questi errori di localizzazione sono dell’ordine dei mm o cm. Se ne deduce che in caso di posizionamento con pseudo-codice, in cui l’accuratezza delle misure è nell’ordine dei metri, questo effetto è completamente trascurabile. Per misure ad elevata precisione, non è affatto trascurabile.
I centri di fase devono essere quindi molto stabili e ben calibrati.
Errori minimi si possono comunque riscontrare e vanno corretti, in fase di ela-borazione del segnale, note le caratteristiche di fase proprie dell’antenna ricevente [3].
2.7
Diagramma di Radiazione
Il Diagramma di Radiazione è una funzione matematica o rappresentazione gra-fica delle proprietà di radiazione in funzione delle coordinate spaziali [11]. Le proprietà di radiazione che devono essere note per l’antenna trattata in questa tesi includono:
• Funzione di direttività. È importante poter collezionare il maggior numero di segnali provenienti da tutti i satelliti in visibilità, al di sopra dell’oriz-zonte, così da assicurare maggior precisione e velocità nella localizzazione. Vorremmo quindi idealmente una funzione direttività il più omogenea possi-bile nell’emisfero superiore, fino a pochi gradi di angolo dall’orizzonte. Tutti i segnali provenienti da sotto l’orizzonte, devono essere schermati, per que-sto è necessario un roll-off nel relativo diagramma molto ripido per angoli di elevazione piccoli.
• Co-polarizzazione e cross-polarizzazione. Come descritto nei paragrafi pre-cedenti, per aumentare la reiezione ai disturbi dovuti ai percorsi multipli è necessario avere un buon isolamento cross-polare, per tutto lo spazio ango-lare al di sopra dell’orizzonte. È utile quindi conoscere l’andamento nello spazio della polarizzazione caratteristica dell’antenna.
• Fase dell’antenna. L’importanza di conoscere come è distribuita la fa-se del campo irradiato al variare degli angoli di elevazione e azimut è di fondamentale importanza per questa specifica applicazione.
2.7.1
Lobi del diagramma di radiazione
Un lobo di radiazione è una porzione del diagramma di radiazione circondato da regioni di intensità di radiazione relativamente bassa. Spesso vengono classificati in:
• Lobi principali o Fasci principali. Il lobo di radiazione contenente la dire-zione di massima radiadire-zione.
• Lobi minori. Tutti i lobi tranne il principale
• Lobi laterali. Lobi in qualunque direzione tranne quella del lobo principale. • Lobi posteriori. Lobi i cui assi presentano angoli di circa 180° rispetto alla
direzione fascio principale di un’antenna.
I lobi minori spesso rappresentano radiazioni in direzioni indesiderate e quindi vanno minimizzati.
2.8
Applicazioni Multiband e Broadband
Il progetto dell’antenna deve andare incontro a esigenze di bande di segnale sem-pre più ampie (vedi per esempio future trasmissioni Galileo o GPS[6]) e di poter ricevere segnali distribuiti su più portanti ben distanziate in frequenza tra loro. Queste richieste risultano molto stringenti poiché le antenne con polarizzazione circolare hanno lo svantaggio di essere tipicamente a banda stretta.
2.8.1
Bande multiple
Ricevendo segnali da ogni satellite su due (o più) ben distanziate frequenze por-tanti, è possibile calcolare il ritardo in eccesso causato dall’attraversamento di ionosfera e troposfera su ogni percorso e correggerlo, riducendo l’incertezza nella stima della posizione del ricevitore.
Il beneficio di avere una trasmissione su più frequenze sta anche nell’avere ridondanza di segnale e aumentata resistenza alle interferenze (jamming) [3].
2.8.2
Applicazioni multi-modali
I ricevitori che sfruttano più sistemi GNSS devono essere in grado di ricevere più canali posti a frequenze distanziate tra loro, corrispondenti alle diverse trasmissio-ni GNSS che si vogliono utilizzare contemporaneamente (GPS,Galileo,GLONASS,etc.). Su ogni portante è richiesta inoltre una precisa banda di trasmissione, che può essere superiore ai 20 MHz [3]. Considerando un sistema multi-modale che sfrutti contemporaneamente i sistemi GPS, GLONASS, COMPASS e Galileo, la banda necessaria al ricevitore spazia dai 1164 ai 1615.5 MHz. L’antenna deve essere in grado di fornire una polarizzazione RHCP con ridotto AR e mantenere un buon guadagno direttivo su tutte le bande di frequenza.
2.9
Immunità ai disturbi dovuti a percorsi
mul-tipli e ombreggiamento
I percorsi multipli sono dovuti principalmente a superfici riflettenti nelle vicinanze del ricevitore. I diversi echi che giungono al ricevitore si sommano e di conse-guenza il segnale ricevuto ha ritardi di fase relativi, di natura casuale o quasi, che si traducono in errori di misura. L’errore di distanza causato dai percorsi multipli può crescere fino a un centinaio di metri in prossimità di edifici. I metodi per ridurre l’effetto dei percorsi multipli possono essere classificati in:
• metodi basati su antenna.
• metodi basati su signal-processing.
La natura complessa e random dei percorsi multipli rende necessario l’utilizzo di modelli statistici. In ogni caso per applicare metodi statistici è necessario rilevare una grande quantità di dati e misure, molto diversi tra loro in base alla struttura dell’ambiente circostante. Ogni tipo di ambiente deve essere quindi accuratamente modellizzato, non esistono modelli universali. I metodi basati su signal-processing sono quindi impraticabili per applicazioni in tempo reale. È necessario un progetto molto accurato dell’antenna:
• Realizzando un elevato isolamento cross-polare, determinante nella reiezione di echi dopo la prima riflessione.
• Ottimizzando la funzione direttività. Idealmente non dovrebbero esistere lobi posteriori nel diagramma di radiazione della funzione direttività, in modo da sopprimere i segnali provenienti da sotto l’orizzonte.
Il fenomeno dei percorsi multipli resta comunque uno dei principali fattori di degradazione della precisione nelle misure nei sistemi di geoposizionamento satellitare, anche sfruttando le più avanzate tecniche differenziali (DGPS) [2].
2.10
Adattamento di impedenza
La porta di ingresso/uscita costituisce un elemento molto importante nei sistemi d’antenna, poiché da essa dipendono, in buona misura, le prestazioni di tutto il sistema ricetrasmittente. Nella porta devono verificarsi, nella maggiore misu-ra possibile, le condizioni di adattamento. Nel caso di antenna tmisu-rasmittente, si ha la condizione di adattamento se l’antenna assorbe totalmente la potenza resa disponibile dal generatore sulla linea di alimentazione. Nel caso di antenna rice-vente, si ha adattamento quando la linea assorbe tutta la potenza resa disponibile all’uscita dall’antenna.[10]
2.10.1
Interfaccia tra antenna e linea di trasmissione
Il grado di adattamento (facendo riferimento ad un’antenna trasmittente, poiché maggiormente intuitivo, il risultato è estendibile per dualità anche all’antenna in ricezione) può essere quantificato in tre diversi parametri:
• Coefficiente di riflessione, esprime in una generica sezione della linea, il rap-porto tra l’intensità dell’onda riflessa dalla porta verso il generatore rispetto a quella dell’onda incidente dal generatore verso la porta.
• Impedenza normalizzata, esprime il rapporto complesso tensione/corrente in una generica sezione della linea (impedenza di linea) rispetto all’impe-denza della linea stessa.
• Rapporto d’onda stazionaria, abbreviato con ROS o VSWR(Voltage Stan-ding Wave Ratio)
Coefficiente di riflessione e Return Loss
Il coefficiente di riflessione Γ è un numero complesso funzione della sezione x della linea, definito dalla relazione[10]
Γ(x) ≡ Vrif l(x)
Vinc(x)
(2.25) Quando non si ha adattamento di impedenza tra antenna e linea, il sistema di trasmissione radio ne risulta degradato, poiché buona parte della potenza pro-veniente dalla linea di trasmissione viene riflessa al generatore. L’impedenza di ingresso dell’antenna è misurata rispetto all’impedenza caratteristica delle linee di trasmissione di alimentazione. Quando le due impedenze non sono uguali, un’onda di tensione Γ · V viene riflessa, Γ può essere definito anche in funzione delle impedenze d’ingresso e di linea [15]:
Γ = ZA− Z0
ZA+ Z0
(2.26) Dove ZA è l’impedenza d’ingresso dell’antenna e Z0 è l’impedenza
caratteri-stica di linea.
Il quadrato del modulo di Γ può essere scritto come: |Γ|2 = |Vrif l(x)|2/Z0
|Vinc(x)|2/Z0
= Wrif l
Wincl
(2.27) Dove Winc e Wrif l sono rispettivamente le potenze trasmesse verso l’antenna
e riflessa dall’antenna.
Un parametro intuitivo che offre un’immediata verifica della bontà del pro-getto dell’adattamento tra linea e antenna èReturn Loss abbreviato con RL. Si definisce Return Loss:
Return Loss= −20log10(|Γ|) (2.28)
Impedenza normalizzata
L’impedenza normalizzata è definita come:
dove Z(x) è l’impedenza di linea, definita come rapporto tra tensione di li-nea V (x) = Vinc(x) + Vrif l(x) e corrente di linea I(x) = Iinc(x) + Irif l(x). Le
onde di corrente sono legate alle onde di tensione da Iinc = Vinc/Z0 Irif l =
−Vrif l/Z0. L’impedenza normalizzata è legata al coefficiente di riflessione tramite
la relazione:
z(x) = 1 + Γ(x)
1 − Γ(x) (2.30)
Nel caso di perfetto adattamento, cioè in presenza di sola onda progressiva, si ha:
• Z = Z0
• z = 1 • Γ = 0
La variazione di z(x) avviene in modo complesso e poco intuitivo, è necessario l’utilizzo della carta di Smith.
Rapporto d’onda stazionario (ROS o VSWR)
Su una linea di trasmissione, le due onde incidente e riflessa formano un’onda stazionaria:
Vmax = (1 + |Γ|)Vincidente; Vmin = (1 − |Γ|)Vincidente (2.31)
Il Rapporto d’onda stazionaria è il rapporto tra la massima e minima tensione (o corrente) in modulo che si incontra muovendosi lungo la linea di alimentazione [10]: ROS ≡ |Vmax| |Vmin| = |Imax| |Imin| = |Vinc|+ |Vrif l| |Vinc| − |Vrif l| = |Iinc|+ |Irif l| |Iinc| − |Irif l| (2.32)
Il ROS è legato al modulo del coefficiente di riflessione dalla relazione:
ROS = 1 + |Γ|
1 + |Γ| (2.33)
ROS e |Γ| contengono la stessa informazione, ma ROS non fa riferimento a una particolare sezione x della linea , ma a ciò che avviene complessivamente lungo la linea stessa. Esso è sufficiente per qualificare l’antenna per ciò che riguarda gli aspetti energetici legati all’adattamento, cioè la frazione di potenza "respinta" alla porta [10].
2.10.2
Impedenza d’antenna
L’impedenza d’ingresso di una antenna Zant si compone in generale di una parte
reale (resistiva) e una parte immaginaria (reattiva).
Zant= (Rrad+ Rdiss) + jX (2.34)
![Figura 3.7 Superficie corrugata realizzata con risonatori a quarto d’onda L’onda piana, o trasverso elettromagnetico TEM può essere sempre scompo-sto nelle due polarizzazioni TM e TE, senza perdere generalità del problema [19].](https://thumb-eu.123doks.com/thumbv2/123dokorg/7509462.105059/47.892.255.622.682.1000/superficie-corrugata-realizzata-risonatori-trasverso-elettromagnetico-polarizzazioni-generalità.webp)