Universitá di Pisa
Facoltá di Ingegneria
Dipartimento di Sistemi Elettrici e Automazione
TESI DI LAUREA IN INGEGNERIA INFORMATICA
Convertitori con PWM e PRM:
costruzione ed identificazione.
Relatori: Ch.mo Prof. Ing. A. Balestrino
Prof. Ing. A. Landi
Candidato: Daniele Benedetti
Indice
Introduzione iv
1 I convertitori DC-DC 1
1.1 Introduzione . . . 1
1.2 Concetti fondamentali . . . 1
1.3 Convertitore abbassatore: Buck . . . 3
1.4 Convertitore elevatore: Boost . . . 6
1.5 Convertitore abbassatore-elevatore: Buck-Boost . . . 8
1.6 Considerazioni generali . . . 9
2 Progetto del convertitore Boost 11 2.1 Introduzione . . . 11
2.2 Specifiche del convertitore . . . 11
2.3 Stadio di alimentazione . . . 12
2.4 Dimensionamento dell’induttanza . . . 13
2.5 Dimensionamento della capacità . . . 17
2.6 Scelta dell’interruttore elettronico . . . 23
2.7 Dimensionamento dei semiconduttori . . . 23
2.8 Ondulazione della corrente d’ingresso . . . 24
3 Analisi e scelta dei componenti 26 3.1 Introduzione . . . 26
3.2 Scelta dei semiconduttori . . . 26
3.3 Dimensionamento del dissipatore del mosfet . . . 27
3.4 Dimensionamento del dissipatore del diodo . . . 32
3.5 Driver di pilotaggio del Mosfet . . . 32
Indice
4 Montaggio del convertitore 37
4.1 Introduzione . . . 37
4.2 Circuiteria per il driver . . . 37
4.3 Circuiteria per il Mosfet . . . 38
4.4 Dimensionamento del fusibile di protezione . . . 40
4.5 Costruzione del prototipo . . . 40
4.6 Precauzioni d’utilizzo . . . 41
5 Tecniche di modulazione 43 5.1 Introduzione . . . 43
5.2 Pulse Width Modulation . . . 45
5.3 Pulse Ratio Modulation . . . 47
5.3.1 Implementazione del modulatore . . . 49
5.4 Comparazione tra PRM e PWM . . . 54
6 Implementazione digitale del modulatore PWM 58 6.1 Introduzione . . . 58
6.2 Microcontrollori e Microprocessori . . . 58
6.3 Microcontrollori Microchip . . . 59
6.3.1 Il PIC16F876A . . . 61
6.4 Costruzione e programmazione del modulatore PWM . . . . 62
6.4.1 Il modulo PWM . . . 63
6.4.2 Il convertitore A/D . . . 65
6.4.3 Implementazione fisica . . . 67
7 La tecnica delle funzioni modulanti 73 7.1 Introduzione . . . 73
7.2 Le funzioni modulanti . . . 73
7.3 Le funzioni modulanti per identificare un modello non lineare 75 7.4 Le funzioni spline . . . 78
7.5 La scelta dei parametri . . . 80
7.5.1 Il segnale di ingresso . . . 80
7.5.2 L’ordine della funzione spline . . . 80
7.5.3 Il tempo caratteristico . . . 80
7.6 Implementazione software . . . 81
8 Identificazione del convertitore 83 8.1 Introduzione . . . 83
Indice
8.3 Analisi della risposta al gradino . . . 86
8.3.1 Risposta al gradino con PWM . . . 88
8.3.2 Risposta al gradino con PRM . . . 89
8.3.3 Risposta al gradino con digital-PWM . . . 90
8.4 Identificazione e validazione . . . 92
8.4.1 Identificazione con PWM . . . 94
8.4.2 Identificazione con PRM . . . 96
8.4.3 Identificazione con digital-PWM . . . 97
9 Conclusioni 100 9.1 Considerazioni finali . . . 100
9.2 Sviluppi futuri . . . 102
Data Sheets 103
Elenco delle figure 112
Introduzione
La maggior parte dei dispositivi e dei circuiti elettronici richiede un’ ali-mentazione in tensione continua, singola come ad esempio per le porte TTL (+5V ) o duale come per gli amplificatori operazionali (±12V ). Le tensioni richieste sono normalmente comprese fra qualche volt e qualche decina di volt, con valori di corrente che possono andare da qualche mA alle decine di ampere.
Per questo scopo vengono comunemente impiegati alimentatori e
bat-terie. Gli alimentatori sono dispositivi in grado di convertire la tensione
alternata di rete in tensione continua, mentre le batterie sono utilizzate principalmente nelle apparecchiature portatili ed hanno una durata limita-ta. I entrambi i casi la tensione continua in uscita può non essere adeguata alle esigenze, quindi si rende necessario un ulteriore stadio di conversione per portarla al valore desiderato.
In questo contesto si pongono i convertitori DC/DC, dispositivi in grado
di convertire una tensione continua Vi di ingresso in una tensione continua
Vo di uscita di valore minore, maggiore o invertito rispetto a Vi.
Nella presente tesi verrà analizzata una particolare classe di convertitori, i cosiddetti convertitori a “commutazione”o “switching”, caratterizzati dagli elevati rendimento e frequenza di utilizzo. Il primo passo consisterà nel progettare e costruire un dispositivo elevatore di tensione (Booster ). Nel capitolo 1 verrano presentati i convertitori switching mentre nei capitoli 2, 3 e 4 saranno trattati tutti gli aspetti implementativi della realizzazione del convertitore Boost.
La tensione di uscita di un convertitore a commutazione dipende dalla sua tensione di ingresso e dalla relazione che intercorre fra tempo di con-duzione e tempo di interdizione dell’ interruttore interno. Il rapporto tra il periodo in cui il tasto è in conduzione ed il periodo della forma d’onda
Introduzione che comanda il tasto stesso è chiamato duty-cycle ed è imposto dall’esterno tramite un segnale di controllo opportunamente modulato
La tecnica di modulazione più utilizzata è la PWM (Pulse Width
Mod-ulation). Normalmente la PWM viene implementata in maniera analogica,
tramite amplificatori operazionali. L’avvento dell’elettronica digitale e l’es-pansione capillare che stanno avendo i microcontrollori, hanno permesso di introdurre questi dispositivi programmabili anche nell’ambito dell’elet-tronica di potenza. Tramite un microcontrollore PIC sarà progettato e realizzato un modulatore PWM digitale, programmabile esternamente dal PC (cap. 6).
Una tecnica di modulazione meno diffusa ma non per questo meno ef-ficace della PWM è la PRM (Pulse Ratio Modulation). Nel capitolo 5 saranno riassunte le sue caratteristiche e sarà progettato e realizzato un modulatore PRM funzionante, analizzandone le differenze con le versioni precedentemente discusse. Tutti i modulatori presentati verranno testati sul convertitore Boost costruito.
Normalmente la regolazione della tensione di uscita viene effettuata uti-lizzando un sistema di controllo a ciclo chiuso dove la tensione sul carico viene comparata ad una tensione di riferimento, ed in base alla differenza tra le due viene prodotta una opportuna tensione di controllo che por-ta la tensione di uscipor-ta al valore desiderato. Il sistema di controllo viene progettato basandosi su di un modello matematico del convertitore. E’ quindi importante, dal punto di vista progettuale, riuscire ad avere model-li matematici che riproducano più fedelmente possibile il comportamento del convertitore reale, almeno in un determinato range di frequenze e in un’intorno del punto di lavoro in cui si desidera operare.
Solitamente, per poter utilizzare tecniche di controllo classiche, si cerca di modellare il sistema con un modello lineare valido per piccoli segnali. Data la natura intrinsecamente non lineare dei convertitori switching, un modello puramente lineare può risultare poco accurato per poter dimen-sionare correttamente il sistema di controllo, inoltre può essere opportuno disporre di un modello valido anche per variazioni più ampie intorno al punto di lavoro.
Un modello più accurato del sistema, che cerchi tenere conto anche della presenza di non linearità statiche, può essere ottenuto ricorrendo ad un modello di tipo Hammerstein. Tale modello è costituito da un blocco non lineare statico a cui è collegato in cascata un blocco lineare.
Introduzione Hammerstein è la tecnica delle funzioni modulanti. Si tratta di una tecnica di identificazione parametrica di tipo off-line. Per applicare tale tecnica è sufficiente disporre della risposta del sistema ad un segnale di ingresso ru-moroso. I coefficienti del modello sono ricavati mediante l’applicazione di un opportuno procedimento matematico ai segnali di ingresso e di uscita. Nel cap. 7 verrà presentata la tecnica delle funzioni modulanti, tramite la quale si procederà all’identificazione del modello del convertitore, in funzione del tipo di modulatore utilizzato (capitolo 8).
Il capitolo 9 chiude il lavoro di tesi, riportando le conclusioni dell’espe-rienza e proponendo sviluppi per il futuro.
Desidero ringraziare il Prof. Balestrino ed il Prof. Landi per avermi dato la possibilità di svolgere questo lavoro di tesi, ed i tecnici dei laboratori del Dipartimento di Sistemi Elettrici ed Automazione per la professionalità dimostrata.
Un ringraziamento particolare va a Davide Corsanini per avermi se-guito direttamente nel lavoro, fornendomi sempre preziosi suggerimenti e prestandomi sempre la massima disponibilità.
Capitolo 1
I convertitori DC-DC
1.1
Introduzione
In questo primo capitolo verrà fatta una panoramica sulle possibili tec-niche di conversione DC-DC, da quella lineare a quella a commutazione, motivando le scelte che portano ad utilizzare quest’ultima nella maggior parte delle applicazioni di potenza. In questo ambito saranno introdotte le configurazioni circuitali di base usate per implementare convertitori a commutazione.
1.2
Concetti fondamentali
Per trasferire potenza elettrica da una sorgente DC ad un carico in modo controllato, esistono sostanzialmente due modi: la conversione lineare e quella switching mode. Nelle fig. 1.1 e 1.2 sono illustrate le loro forme più
semplici.5 4 3 2 1 D D C C B B A A iin Rc Vin + Vout -R + -<Doc> <RevCode> <Title> Custom Title
Size Document Number Rev
(a) Resistenza variabile.
5 5 4 4 3 3 2 2 1 1 D D C C B B A A iin Q Rc Vin +Vce -Vout + + -<Doc> <RevCode> <Title> Custom 1 1 Wednesday, February 12, 2003 Title
Size Document Number Rev
Date: Sheet of
(b) Transistor. Figura 1.1: Conversione lineare
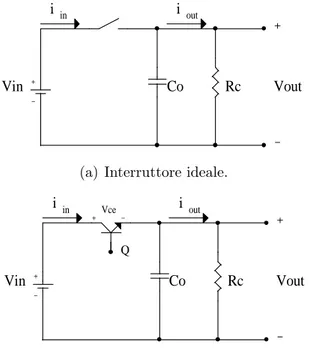
Cap. 1 I convertitori DC-DC 5 5 4 4 3 3 2 2 1 1 D D C C B B A A i in Rc Vin Vout + + -i out Co -<Doc> <RevCode> <Title> Custom 1 1 Wednesday, February 12, 2003 Title
Size Document Number Rev
Date: Sheet of
(a) Interruttore ideale. 5 5 4 4 3 3 2 2 1 1 D D C C B B A A i in Q Rc Vin +Vce -Vout + + -i out Co -<Doc> <RevCode> <Title> Custom 1 1 Wednesday, February 12, 2003 Title
Size Document Number Rev
Date: Sheet of
(b) Interruttore a transistor.
Figura 1.2: Conversione “switched mode”
Nella figura 1.1 si utilizza una resistenza variabile o un transistor con-trollato in base funzionante in zona lineare. In entrambi i casi è possibile solo ottenere una tensione di uscita minore o uguale di quella di ingresso: maggiore è la differenza fra le due, maggiore è la potenza dissipata sull’ele-mento di controllo. Questo fatto abbassa il rendisull’ele-mento dell’alimentatore (30 ÷ 50% ) ed obbliga a ricorrere a dissipatori voluminosi.
Negli alimentatori a commutazione (fig. 1.2) il dispositivo di controllo del flusso di potenza dall’ingresso all’uscita è un interruttore, alternativa-mente chiuso e aperto (idealalternativa-mente con Ron=0 e Roff=∞ ); in questo caso controllando l’intervallo di tempo in cui il tasto è chiuso e quello in cui è aperto, si può regolare in maniera efficiente il flusso di potenza al cari-co (cari-con rendimenti prossimi al 100% ) e ridurre drasticamente la potenza dissipata.
La necessità di avere tensione continua in uscita comporta la presenza di elementi di immagazzinamento dell’energia che hanno il compito di elimi-nare le componenti di frequenza diversa da zero originate inevitabilmente dal processo di commutazione.
Sfruttando apposite topologie circuitali è possibile generare sovraten-sioni e sovracorrenti che consentono di innalzare la tensione di uscita rispet-to a quella di ingresso, funzionamenrispet-to mai possibile con alimentarispet-tori lineari.
Cap. 1 I convertitori DC-DC É evidente che per convertitori di potenza elevata la tecnica lineare non è attuabile, ma anche per basse potenze (da 25W in su) gli alimentatori
switching, per il loro rendimento superiore, per il peso e l’ingombro inferiori
e per il basso costo, stanno progressivamente soppiantando gli alimentatori lineari.
Come già descritto in [4], i più semplici convertitori a topologia minima sono costituiti da un dispositivo che implementa il tasto, un’induttanza, un condensatore ed il carico. Variando la disposizione di tali elementi cir-cuitali si ottengono le varie topologie dei convertitori: nei prossimi paragrafi saranno brevemente esposte le tre configurazioni di base.
1.3
Convertitore abbassatore: Buck
Il Buck può essere considerato il più semplice convertitore DC-DC ed il suo diagramma è rappresentato in fig. 1.3.
5 4 3 2 1 D D C C B B A A i in Rc Vin Vo -+ -Co V1 + i o L 1 0 i L VL + -<Doc> <RevCode> <Title> Custom Title
Size Document Number Rev
Figura 1.3: Convertitore di tipo Buck ideale.
Il principio di funzionamento è il seguente: la tensione d’ingresso è affettata (da qui derivano i nomi di “chopper” o di “hacheur” tipici del-la letteratura internazionale) dall’interruttore, dando luogo ad una forma d’onda di tipo pulsante. Il filtro passa-basso posto a valle del tasto lascia passare solo la componente continua di questa tensione pulsante. Il valor medio di tale tensione è dato da:
V0 = D · Vin (1.1)
dove D, detto duty-ratio, è definito come il rapporto tra il periodo in
cui il tasto è in conduzione (ton) ed il periodo della forma d’onda che
co-manda il tasto stesso (Ts). In questo modo è possible regolare la tensione
Cap. 1 I convertitori DC-DC d’uscita semplicemente variando il duty-ratio del commutatore. La verifica è semplice se si considerano le equazioni costitutive del circuito:
L · diL dt = −V0+ u · Vin C · dV0 dt = −RV0C + iL (1.2) con u = 1 se il tasto di fig. 1.3 è chiuso (posizione 1) e u = 0 se il tasto è aperto (posizione 0). Nell’ipotesi che la conduzione sia continua, cioè che l’induttanza L sia sempre attraversata da corrente, quando u = 1, per un
tempo ton= D · Ts, ci sarà una tensione positiva Vin− V0 sull’induttanza L,
che causerà una crescita lineare nella corrente induttiva iL. Quando u = 0,
per un tempo tof f = (1 − D) · Ts, la tensione sull’induttanza L diventa
−V0 e iL decresce linearmente. In condizioni di regime le forme d’onda
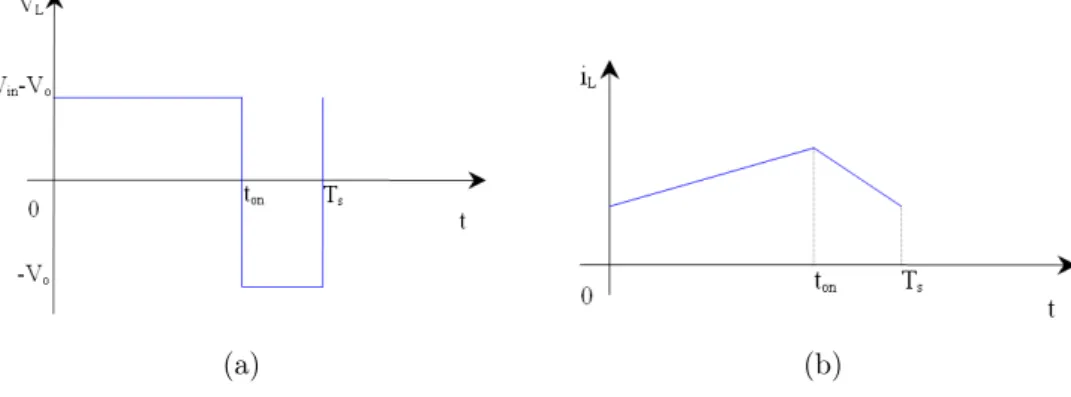
della tensione e della corrente sull’induttanza si ripetono periodicamente: ciò significa che l’integrale della tensione sull’induttanza in un periodo deve annullarsi (fig. 1.4).
(a) (b)
Figura 1.4: Forme d’onda di tensione e corrente sull’induttanza L. L’equazione da verificare è la seguente:
(Vin− V0) · ton− V0· (Ts− ton = 0) (1.3)
Dividendo la 1.3 per Ts è possibile riscrivere l’equazione in funzione del
duty-ratio D:
(Vin− V0) · D − V0· (1 − D) = 0
da cui è immediato verificare la 1.1.
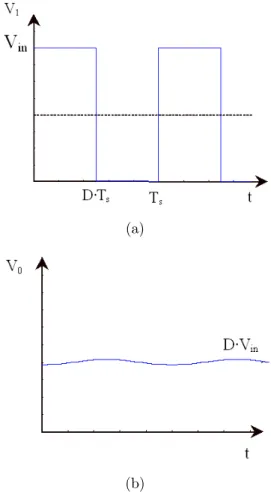
In realtà la tensione d’uscita non è perfettamente costante ed alla ponente continua si sovrappone un ripple a frequenza pari a quella di
Cap. 1 I convertitori DC-DC la sua frequenza di taglio sia inferiore a quella di commutazione, non ri-esce ad eliminare del tutto gli effetti della prima armonica dell’onda quadra generata dalla modulazione del tasto (fig. 1.5).
(a)
(b)
Figura 1.5: Tensioni in ingresso ed uscita dal filtro LC.
Il ripple sul valor medio di uscita è legato alla tensione di ingresso tramite la seguente relazione:
∆V0 Vin = T 2 s 32 · L · C0 (1.4) Il forte legame presente fra le tensioni in gioco ed il duty-cycle è analogo a quello che mette in relazione fra loro le correnti: riassumendo possiamo descrivere il comportamento di un Buck converter con le seguenti relazioni:
V0 Vin = D (1.5) I0 Iin = 1 D (1.6)
Cap. 1 I convertitori DC-DC Per queste caratteristiche il Buck può essere rappresentato come un trasformatore in continua con rapporto di trasformazione pari a D, sempre che si riferiscano le correnti con i loro valori medi e non istantanei.
Il tasto ideale può essere implementato tramite un dispositivo a semi-conduttore (BJT, MOSFET ecc.). In fig. 1.6 è mostrata una possibile implementazione in cui sono usati un diodo e un BJT. Il diodo lavora in sincronismo con il BJT sulla cui base è inviato il segnale che ne permette la commutazione. Quando il BJT è in conduzione il diodo è interdetto a causa della tensione negativa impressa ai suoi capi e, viceversa, quando il BJT è interdetto il diodo è polarizzato direttamente e quindi è in conduzione.
5
4
3
2
1
D
D
C
C
B
B
A
A
Rc
Vin
+-Co
L
D
Q
<Doc> <RevCode> <Title> Custom TitleSize Document Number Rev
Figura 1.6: Convertitore Buck: realizzazione circuitale.
L’implementazione mostrata simula solo in parte il tasto ideale; infatti, mentre nel caso ideale la conduzione della corrente è permessa in entrambe le direzioni ed è possibile bloccare tensioni di diversa polarità (perciò è a quattro quadranti), nella versione a semiconduttore il flusso di corrente è limitato ad una sola direzione e le tensioni bloccate sono di una sola polarità (è a un quadrante).
1.4
Convertitore elevatore: Boost
In linea di principio è estremamente semplice ottenere il convertitore ele-vatore partendo da quello abbassatore: basta scambiare la sorgente con il parallelo dato dal condensatore e dal carico. La configurazione che si ottiene è quella di fig. 1.7.
L’induttore è connesso direttamente alla sorgente in continua e diventa un accumulatore di energia se il tasto è chiuso sulla massa, un erogatore Pag. 6
Cap. 1 I convertitori DC-DC 5 5 4 4 3 3 2 2 1 1 D D C C B B A A Rc Vin Vo -+ -Co + L 1 0 L VL i + -<Doc> <RevCode> <Title> Custom 1 1 Wednesday, February 12, 2003 Title
Size Document Number Rev
Date: Sheet of
Figura 1.7: Convertitore di tipo Boost ideale.
di energia al carico quando il tasto è connesso all’alimentazione. Si nota che qui il filtro è diviso in due parti dall’interruttore, mescolando le fun-zioni di commutazione e filtraggio che invece si presentavano completamente distinte nel Buck.
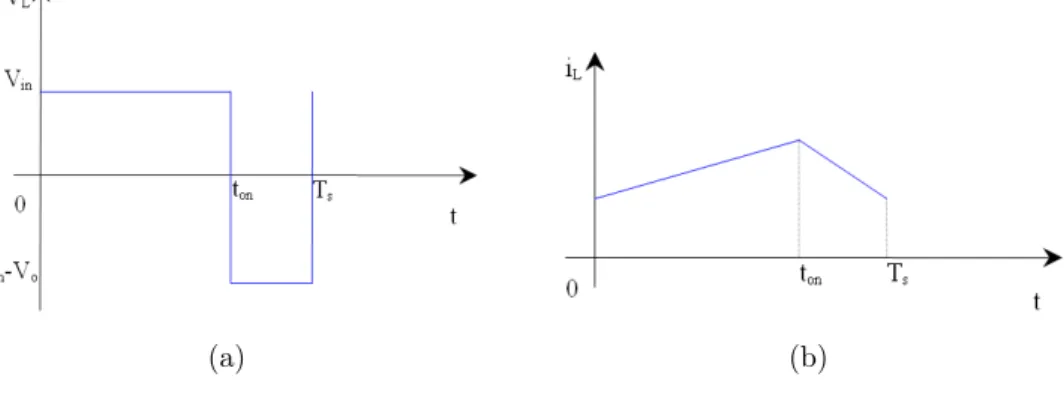
Nel caso del Boost converter le equazioni costitutive del circuito sono: L · diL dt = −u · V0+ Vin C · dV0 dt = − V0 RC + iL· u (1.7) con u = 1 se il tasto è in posizione 1 e u = 0 se il tasto è in posizione 0. Le forme d’onda di tensione e corrente sono riportate in fig. 1.8.
(a) (b)
Figura 1.8: Forme d’onda di tensione e corrente sull’induttanza L. Si può dimostrare che nel caso di componenti ideali privi di perdite abbiamo: V0 Vin = 1 1 − D (1.8) I0 IL = 1 − D (1.9)
Cap. 1 I convertitori DC-DC ∆V0 ∼= Vin· D · Ts (1 − D) · Rc· C0 (1.10) ∆IL = Vin L · D · Ts (1.11)
dove per ∆ILsi intende la variazione di corrente sull’induttanza durante
la fase u=0, uguale e contraria alla variazione durante la fase u=1.
Il rapporto delle correnti, come per il Buck, è riferito ai valori medi e non a quelli istantanei.
In fig. 1.9 è implementato il tasto con la coppia BJT-diodo.
5
4
3
2
1
D
D
C
C
B
B
A
A
Rc
Vin
+-Co
L
D
Q
<Doc> <RevCode> <Title> Custom TitleSize Document Number Rev
Figura 1.9: Convertitore Boost: realizzazione circuitale.
Stavolta, a differenza del Buck, è possibile solo elevare la tensione di uscita: per essere in grado sia di abbassare che di elevare è necessario ricorrere alla configurazione Buck-Boost.
1.5
Convertitore abbassatore-elevatore:
Buck-Boost
La configurazione topologica del Buck-Boost converter si differenzia dalle precedenti per la diversa disposizione del componente induttivo (fig. 1.10). Si può dimostrare che nel caso di componenti ideali privi di perdite abbiamo : V0 Vin = D 1 − D (1.12) Pag. 8
Cap. 1 I convertitori DC-DC 5 5 4 4 3 3 2 2 1 1 D D C C B B A A Rc Vin Vo -+ - Co L + L i <Doc> <RevCode> <Title> Custom 1 1 Wednesday, February 12, 2003 Title
Size Document Number Rev
Date: Sheet of
Figura 1.10: Convertitore di tipo Buck-Boost ideale.
∆V0 V0 = D · Ts Rc· C0 (1.13) ∆IL = Vin L · D · Ts (1.14)
In fig. 1.11 riportiamo una delle possibili realizzazioni circuitali.
5
4
3
2
1
D
D
C
C
B
B
A
A
Rc
Vin
+-Co
L
D
Q
<Doc> <RevCode> <Title> Custom TitleSize Document Number Rev
Figura 1.11: Convertitore Buck-Boost: realizzazione circuitale.
1.6
Considerazioni generali
Le tre tipologie di convertitori analizzate sino ad ora sono generalmente con-siderate “di base”, ossia sono costituite da una differente disposizione dello stesso numero e dello stesso tipo di componenti. In particolare derivano tutti da una rotazione ciclica della connessione serie dell’induttanza L e dell’interrutore tra la porta di ingresso e la porta di uscita. Si può verifica-re che il guadagno del Buck-Boost è ottenibile come prodotto tra i guadagni Pag. 9
Cap. 1 I convertitori DC-DC del Buck e del Boost: questo significa che una connessione in cascata tra i due convertitori di base porta ad un convertitore equivalente al Buck-Boost, ma con l’uso di un numero non minimo di componenti.
I tre convertitori si comportano in maniera diversa per quanto riguarda la corrente assorbita dall’alimentazione (corrente di ingresso) e la corrente erogata dal condensatore di uscita. Solo per il boost la corrente di ingresso ha un andamento continuativo; per gli altri la corrente è impulsiva e ciò comporta l’emissione di disturbi elettromagnetici (EMI: electro magnetic
interference) nello spazio e nella rete di alimentazione. D’altra parte solo
il buck provvede a caricare il condensatore in maniera quasi uniforme. Gli altri forniscono picchi di corrente caratterizzati da un elevato valore effi-cace. Ciò comporta una maggiore caduta sulla resistenza equivalente del condensatore e quindi una maggiore dissipazione di potenza.
Il funzionamento dei convertitori può essere di tipo continuo o discon-tinuo, a seconda dell’andamento della corrente nell’induttore. Nel funziona-mento discontinuo la corrente arriva ad annullarsi completamente durante la fase di scarica della bobina, sicchè questa, nel periodo successivo, si ri-carica partendo ogni volta da zero. Questo fatto comporta una risposta più rapida del convertitore alle brusche variazioni della tensione di ingres-so e del carico (transitori), rispetto a quanto avviene nel funzionamento continuo, in cui è necessario un certo tempo per adattare alle mutate esi-genze esterne la notevole quantità di energia immagazzinata nell’induttore.
Inoltre, a causa del più elevato ∆IL, nel funzionamento discontinuo il
con-vertitore necessita di valori di induttanza più bassi e quindi di bobine più piccole. Per contro maggiori sono i picchi di corrente nel transistore, nel diodo e nel condensatore.
Le relazioni 1.1, 1.8 e 1.12 che legano la tensione d’uscita V0 alla
ten-sione d’ingresso Vin, valide rispettivamente per i convertitori Buck, Boost e
Buck-Boost, sono applicabili solo se i convertitori funzionano in conduzione
continua, ossia se la corrente iL è sempre maggiore di zero. Nel caso di
conduzione discontinua, le relazioni citate sopra non sono più valide e la
Capitolo 2
Progetto del convertitore Boost
2.1
Introduzione
In questo capitolo sarà affrontato il progetto di un convertitore Boost tale da rispondere a determinate specifiche imposte sulle tensioni in gioco, sulla potenza e sulla frequenza di lavoro. Saranno trattati tutti gli stadi del dispositivo, dall’alimentazione all’uscita, in modo tale che in condizioni di carico e tensione nominale sia garantita la conduzione continua, problema già accennato nel capitolo precedente.
Nel dimensionamento dei componenti sarà tenuto conto anche della possibile variazione del carico e della tensione di uscita all’interno di un determinato range attorno ai valori nominali.
2.2
Specifiche del convertitore
Per affrontare il progetto dei convertitori dobbiamo innanzitutto definire la tensione nominale, la potenza e la frequenza di choppaggio.
Per il boost in questione si è scelto di operare con una tensione di alimentazione appartenente ad un range che va dai 24V ai 35V, per avere ampia libertà di scelta sulla fonte da utilizzare. La tensione di uscita non dovrà superare i 90V.
La potenza nominale, è stata limitata a circa 100 W, mentre la fre-quenza di choppaggio è di 10 Khz. Ovviamente si può scegliere anche una frequenza di choppaggio più elevata, riducendo così le dimensioni dei com-ponenti di potenza, ma bisognerà allora tener presente che il sistema deve essere realizzato su di una scheda dove parte di potenza e parte di control-lo sono vicine e non si prevedono particolari schermature. Ciò comporta
Cap. 2 Progetto del convertitore Boost inevitabilmente la presenza di disturbi ed interferenze fra i circuiti. In base ad alcune prove preliminari, i disturbi possono essere agevolmente elimi-nati con alcune accortezze (ad esempio introducendo piccoli condensatori in alcuni punti del circuito). Per frequenze superiori i disturbi indotti nel circuito possono diventare molto elevati.
Riassumendo, il convertitore dovrà avere le seguenti caratteristiche:
• Range della tensione di ingresso: Vin = 24V ÷ 35V ;
• Potenza erogata: Pn= 100W ;
• Frequenza di choppaggio: fs= 10Khz.
Il carico è rappresentato da una resistenza e non ci sono particolari
vincoli sulla tensione, pertanto assumendo V0n = 90V si ricava che :
Rc= V2 0n Pn = 90 2 100 ∼= 80Ω; I0n = V0n Rc = 90 80 = 1.125A
Prima del dimensionamento del dispositivo è presente una breve pano-ramica sulle sorgenti di alimentazione disponibili.
2.3
Stadio di alimentazione
Le possibili implementazioni della sorgente, presenti in laboratorio, sono fondamentalmente due: un alimentatore stabilizzato da 30V e 5A, ed un trasformatore con ponte raddrizzatore a diodi. Quest’ultimo è stato larga-mente discusso in [1] ed è stato progettato per alimentare dispositivi che rispettano le condizioni descritte nel paragrafo precedente. Lo schema di principio è mostrato in fig. 2.1
5 4 3 2 1 D D C C B B A A Cin 300 VA 220/24 V 220V 50 Hz Vin + -<Title> Title
Size Document Number Rev
Figura 2.1: Alimentatore con ponte raddrizzatore.
Cap. 2 Progetto del convertitore Boost Il trasformatore è un abbassatore (220/24) ed ha una potenza apparente di 300 VA. Il ponte a diodi converte la tensione sinusoidale a valor medio nullo in una forma d’onda unidirezionale con valor medio diverso da zero e frequenza doppia rispetto alla tensione di rete. Infine è presente una
capacità di uscita per ridurre l’ondulazione di Vin.
A questo punto, definite le specifiche da rispettare, possiamo passare a dimensionare i componenti basilari del convertitore: induttanza, capacità ed interruttore.
2.4
Dimensionamento dell’induttanza
La bobina è parte integrante del filtro LC adibito a trasformare la ten-sione impulsiva di ingresso nel valore desiderato, in base al duty cycle imposto dall’interruttore. É fondamentale, quindi, studiare l’andamento delle grandezze in gioco nei vari punti del circuito, per poter scegliere il componente adeguato alle nostre esigenze.
Per il convertitore Boost, rappresentato in 2.2, la relazione che lega la tensione d’uscita con quella d’ingresso è:
V0
Vin
= 1
1 − D (2.1)
dove il valore del duty-cycle è pari a:
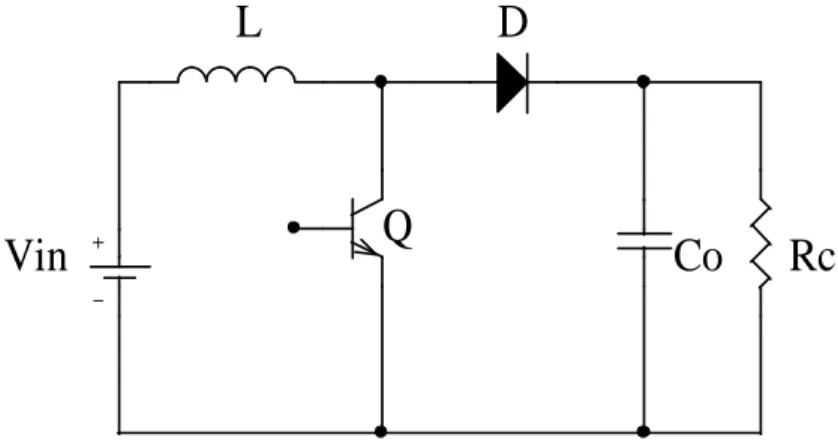
D = V0− Vin V0 (2.2) 5 4 3 2 1 D D C C B B A A Rc Co L D Vin iL M i V + -iD iC i0 DS V0 + -VD + -+ -<Title> Title
Size Document Number Rev
Figura 2.2: Boost converter.
Cap. 2 Progetto del convertitore Boost É possibile dimostrare che:
IL= I0 1 − D (2.3) ∆IL= Vin L · D · Ts= V0· D · (1 − D) · Ts L (2.4)
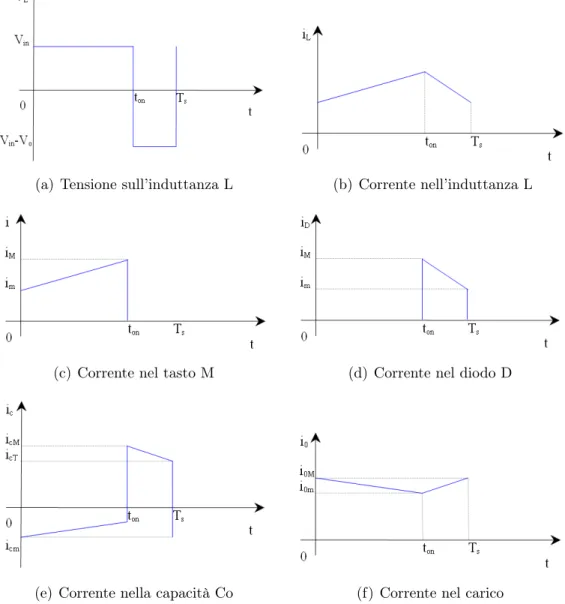
In figura 2.3 sono riportate le forme d’onda delle grandezze più interes-santi del chopper.
(a) Tensione sull’induttanza L (b) Corrente nell’induttanza L
(c) Corrente nel tasto M (d) Corrente nel diodo D
(e) Corrente nella capacità Co (f) Corrente nel carico
Figura 2.3: Andamenti qualitativi delle grandezze più rilevanti del Boost converter.
In fig. 2.4 è riportato l’andamento della corrente iL in funzione
Cap. 2 Progetto del convertitore Boost
corrente iLsi mantiene sempre diversa da zero ed abbiamo conduzione
con-tinua. Per I0 < I0minabbiamo conduzione discontinua e la regolazione della
tensione V0 non è più garantita.
Figura 2.4: Andamento della corrente di induttanza in funzione della corrente di carico.
Scelta la corrente minima I0min per cui non si desidera conduzione
discontinua, si deve avere:
IL≥
∆IL
2 Dalla 1.9 si ricava che:
I0 min 1 − D ≥ ∆IL 2 ∆IL≤ 2 · I0 min 1 − D
Sostituendo l’espressione di ∆IL con la 2.4 si ottiene:
L ≥ V0· D · (1 − D)
2
2 · I0 min· fs
(2.5)
Stabilita la tensione d’uscita V0, D può variare fra un massimo ed un
Cap. 2 Progetto del convertitore Boost Dmin = V0− Vin max V0 Dmax= V0− Vin min V0
In 2.5 le condizioni più restrittive si ottengono per D = Dmin.
Scegliendo I0min= 0.5A e sostituendo in 2.5 si ottiene:
L ≥ V0· V0−Vin max V0 · ³ 1 − V0−Vin max V0 ´2 2 · I0 min· fs = (V0− Vin max) · ³ Vin max V0 ´2 2 · I0 min· fs (2.6) La relazione 2.6, rappresentata in fig. 2.5, presenta il massimo per
V0 = 70V (D = 0.5), quindi si deve avere L ≥ L(70) = 0.875mH.
30 40 50 60 70 80 90 100 0 0.2 0.4 0.6 0.8 1x 10 −3 Tensione di uscita V0 [V] Induttanza L [H]
Figura 2.5: Visualizzazione grafica del vincolo sull’induttanza L.
In laboratorio sono disponibili due tipi di induttanze progettate per essere impiegate in linee di potenza: le prime sono bobine in aria da 470µH, le altre sono bobine con nucleo in ferro da 2mH, con apposito traferro per impedirne la saturazione. Entrambe hanno una corrente nominale continua di 4A, ma la scelta è ricaduta sulle seconde in quanto in alcune prove pratiche hanno dimostrato una radiazione elettromagnetica molto minore.
Cap. 2 Progetto del convertitore Boost Una volta scelta l’induttanza si è in grado di calcolare la resistenza di carico massima per cui si passa da conduzione continua a conduzione discontinua. Date la 2.1 e la 2.3 ed imponendo la continuità di conduzione, si ha che: IL = Vin Rc· (1 − D)2 ≥ ∆IL 2
quindi Rc deve sottostare alla seguente minorazione:
Rc≤
2 · Vin
∆IL· (1 − D)2
(2.7)
Sostituendo le espressioni di D e ∆IL (relazioni 2.2 e 2.4) in 2.7 si ha:
Rc≤ 2 · Vin V0·D·(1−D) L·fs · (1 − D) 2 = 2 · Vin V0· ³ V0−Vin V0 ´ ·³Vin V0 ´3 L·fs = 2 · L · fs· V03 V2 in· (V0− Vin)
Imponendo ILminore o uguale alla sua corrente nominale (pari alla Indella
bobina):
IL=
Vin
Rc· (1 − D)2
≤ 4A
la resistenza di carico dovrà quindi soddisfare le relazioni: Rc ≤ 2·L·fs·V 3 0 V2 in·(V0−Vin) Rc ≥ V 2 0 4·Vin
Le condizioni più restrittive sulla resistenza di carico si ottengono
sos-tituendo Vin = Vinmin nella seconda relazione del sistema, mentre nella
prima relazione, al variare di Vin, il valore minimo di Rc dipende dal valore
assunto dalla tensione V0. La curva, tracciata in 2.6, che delimita il
pas-saggio da conduzione continua a discontinua, si ottiene come inviluppo di
tutte le curve tracciate al variare di Vin fra Vinmax e Vinmin.
2.5
Dimensionamento della capacità
Il secondo elemento immagazzinatore di energia del circuito è la capacità
C0. Il dimensionamento di quest’ultima è funzione del massimo ripple
con-sentito sulla tensione di uscita. Per determinare l’ondulazione della tensione
Cap. 2 Progetto del convertitore Boost 30 40 50 60 70 80 90 100 0 100 200 300 400 500 600 700 800 900 1000
Tensione di uscita V0 [ohm]
Resistenza di carico Rc [volt]
Vin=Vinmax
Vin=V inmin
Zona di sovraccarico Zona di conduzione continua
Zona di conduzione discontinua
Figura 2.6: Visualizzazione grafica del vincolo sul carico Rc .
la variazione di carica della capacità. Le equazioni da scrivere sono due: una valida quando il Mosfet conduce ed una quando il Mosfet è interdetto.
1) Per 0 < t < D · T s il Mosfet conduce e possiamo scrivere:
0 = C0dV0 dt + V0 Rc ; Rc· C0· dV0 dt + V0 = 0 (2.8)
Durante quest’intervallo V0 passa dal valore massimo al valore minimo,
allora risolvendo l’equazione differenziale 2.8 ricaviamo:
V0 = V0M · e−
t
Rc·C0; V0m= V0M · e−Rc·C0D·Ts
2) Per D · T s < t < T s il diodo conduce e possiamo scrivere:
iL = C0· dV0 dt + V0 Rc ; Rc· C0· dV0 dt + V0 = Rc· iL (2.9)
Per la risoluzione di questa equazione ci riferiremo al valor medio della
corrente nell’induttanza IL, anzichè al suo valore istantaneo iL.
Cap. 2 Progetto del convertitore Boost V0 = (V0m− Rc· IL) · e− t−D·Ts Rc·C0 + Rc· IL= = V0M· e− t Rc·C0 + Rc· IL· ³ 1 − e−t−D·TsRc·C0 ´ (2.10)
Sostituendo t = Ts nella 2.10 si ricava il valore di V0M:
V0M = Rc· IL·
1 − e−(1−D)·TsRc·C0
1 − e−Rc·C0Ts
L’ondulazione della tensione V0 è:
∆V0 = V0M− V0m = V0M· ³ 1 − e−Rc·C0D·Ts ´ ∆V0 = Rc· IL· 1 − e−(1−D)·TsRc·C0 1 − e−Rc·C0Ts · ³ 1 − e−Rc·C0D·Ts ´
Se la costante di tempo Rc· C0 è molto maggiore del periodo Ts si usa
l’approssimazione ex ∼= 1 + x per x → 0 e si può scrivere la relazione
approssimata: ∆V0 ∼= Rc· IL· (1 − D) · D · Ts Rc· C0 Poiché IL= Rc·(1−D)V0 si ha: ∆V0 = V0· D · Ts Rc· C0 (2.11) Da notare che la relazione 2.11 è indipendente dall’induttanza L. Le
condizioni più restrittive si ottengono per D = Dmax, imponendo che ∆V0 ≤
0.5%V0 , dalla 2.11 si ha: C0 ≥ Dmax· Ts Rc· 0.005 = (V0− Vin min) · Ts V0 · Rc· 0.005 (2.12)
La relazione 2.12 è funzione crescente di V0, perciò il massimo si ha per
V0 = V0max = 95V (massima tensione raggiungibile). Sostituendo in 2.11
V0 = 95V , Rc = 80Ω si ottiene C0 ≥ 175µF . In figura 2.3(e) è riportato
l’andamento temporale della corrente ic che attraversa la capacità C0.
0 ≤ t ≤ D · T s =⇒ ic = −i0
Cap. 2 Progetto del convertitore Boost
La variazione di corrente Ic nel periodo Ts è:
Ic= icM − icm= iM − i0m− (−i0M) = iM + I0
indicando con I0 la variazione di corrente nel carico.
Dobbiamo tener conto che il circuito equivalente di un condensatore di tipo elettrolitico presenta una resistenza equivalente ESR ed un’induttan-za equivalente ESL (importante solo alle alte frequenze operative), come rappresentato in figura 2.7.
5
4
3
2
1
D
D
C
C
B
B
A
A
C
ESR
ESL
<Doc> <RevCode> <Title> Custom TitleSize Document Number Rev
Figura 2.7: Circuito equivalente di un condensatore .
Se, come nel nostro caso, si ha che ω ·ESL ¿ ESR, la caduta induttiva può essere trascurata. Dovremo quindi avere:
ESR ≤ ∆V0 ∆Ic ∆Ic= iM + ∆I0 = IL+ ∆IL 2 + ∆V0 Rc
Sostituendo l’espressione di IL, ∆IL e ∆V0 (relazioni 2.3, 2.4 e 2.11) si
ottiene: ∆Ic= V0 Rc· (1 − D) +V0· D · (1 − D) · Ts 2 · L + V0· D · Ts R2 c· C0 = = V0· µ V0 Rc· Vin +(V0 − Vin) · Vin 2 · L · V2 0 · fs + (V0 − Vin) V0· R2c· C0· fs ¶
quindi il valore della resistenza equivalente deve essere:
ESR ≤ ∆V0% 100 · ³ V0 Rc·Vin + (V0−Vin)·Vin 2·L·V2 0·fs + (V0−Vin) V0·R2c·C0·fs ´ (2.13)
Le condizioni peggiori si verificano per Vin= Vinmin. Assumendo ∆V0% =
0.5%, la 2.13 ha il minimo per V0 = V0max = 95V . Eseguendo i calcoli si
ottiene ESR ≤ 0.092Ω .
In laboratorio è presente una capacità con seguenti caratteristiche:
Cap. 2 Progetto del convertitore Boost
• C = 470µF
• Vn = 400V
• ESR = 0.080Ω
che verifica tutte le condizioni. Resta da verificare che il valore
effi-cace della corrente ic sia minore della massima corrente ammissibile dalla
capacità C0. Il modo più semplice per calcolare il valore efficace di ic è
partire dalla corrente nel diodo iD, calcolarne il valore efficace e medio poi
ricavarne il valore efficace della componente alternativa come:
ID,ALT =
q
I2
D,ef f − ID2
Con l’ipotesi che la componente continua ID si richiuda sul carico e la
componente alternativa ID,ALT si richiuda attraverso la capacità, il valore
efficace di ic che cerchiamo è uguale a ID,ALT. Con le notazioni di fig. 2.3
abbiamo: 0 ≤ t ≤ D · Ts =⇒ iD = 0 D · Ts ≤ t ≤ Ts =⇒ iD = iM + D · ∆IL 1 − D − t · ∆IL Ts· (1 − D) ID = µ iM + ∆IL 2 ¶ · (1 − D) I2 D,ef f = 1 Ts · Z Ts D·Ts µ iM + D · ∆IL 1 − D − t · ∆IL Ts· (1 − D) ¶2 dt (2.14)
Eseguendo un cambio di variabile ponendo:
x = t − D · Ts =⇒ t = x + D · Ts e dt = dx, sostituendo in 2.14 si ha: I2 D,ef f = 1 Ts · Z (1−D)·Ts 0 µ iM − x · ∆IL Ts· (1 − D) ¶2 dx = = (1 − D) · µ i2M − iM · ∆IL+ ∆I2 L 3 ¶
Cap. 2 Progetto del convertitore Boost I2 D,ALT = ID,ef f2 − ID2 = = (1 − D) · µ i2 M − iM · ∆IL+ ∆I2 L 3 ¶ − µ iM + ∆IL 2 ¶2 · (1 − D)2 = = (1 − D) · · i2 M · D − iM · ∆IL· D + ∆IL2 µ 1 3− 1 4 + 1 4 ¶ · D ¸ (2.15) IL= I0 1 − D = V0 Rc· (1 − D) = Vin Rc· (1 − D)2 ∆IL = Vin· D · Ts L (2.16) iM= IL+ ∆IL 2 = Vin· µ 1 Rc· (1 − D)2 +D · Ts 2 · L ¶ (2.17) Sostituendo le espressioni 2.16 e 2.17 in 2.15 si ottiene:
I2 D,ALT = Vin2 · D · (1 − D) · · "µ 1 Rc· (1 − D)2 +D · Ts 2 · L ¶2 − µ 1 Rc· (1 − D)2 + D · Ts 2 · L ¶ · D · Ts L + +D · Ts2 L2 · µ 1 3− 1 4+ 1 4· D ¶¸
Il valore massimo di ID,ALT si ha per V0 = V0max e Vin = Vinmin con:
Dmass= V0 max− Vin min V0 max = 95 − 24 95 = 0.747 ID,ALT(0.747) = 2, 04A
Visto che Ic ,10Khz,105◦C della capacità scelta vale 3000 mA, questa
Cap. 2 Progetto del convertitore Boost
2.6
Scelta dell’interruttore elettronico
I dispositivi elettronici di potenza impiegati negli alimentatori industriali a commutazione possono essere GTO, SCR, IGBT, BJT di potenza e MOS di potenza. I parametri che influiscono in maniera determinante sulla scelta sono essenzialmente la potenza commutabile e la frequenza operativa.
Per quanto riguarda i livelli di tensione e corrente in gioco nei chop-per tutti i dispositivi menzionati possono funzionare egregiamente. Non altrettanto si può dire per la frequenza operativa. Con frequenza operativa pari a 10 KHz possiamo subito escludere a priori l’utilizzo di SCR, IGBT e GTO poiché sono in grado di commutare ingenti potenze elettriche, ma a frequenze inferiori molto pìù basse. I BJT possono arrivare fino a 80 ÷ 100 KHz ma a queste frequenze presentano notevoli problematiche per quanto concerne il pilotaggio della base; si ricordi che il BJT è un dispositivo co-mandato in corrente. La scelta cade sul MOS di potenza in quanto è un dispositivo pilotato in tensione e per questo preferibile ai BJT.
Concludendo si può dire che le prestazioni nettamente superiori dei MOS di potenza sono dovute al fatto che i loro tempi di commutazione sono almeno un ordine di grandezza inferiori a quelli di un dispositivo bipolare con caratteristiche elettriche comparabili.
2.7
Dimensionamento dei semiconduttori
Nei semiconduttori la tensione e la corrente massima aumentano con D,
quindi i valori massimi sono calcolati per D = Dmass= 0.747. La tensione
massima diretta fra drain e source del Mosfet e la tensione inversa ai capi del diodo sono uguali e valgono:
VDS max = −VD max= V0 max+
∆V0 max 2 = V0 max· µ 1 + Dmass· Ts 2 · Rc· C0 ¶ = = 95 · µ 1 + 0.747 · 10 −4 2 · 80 · 470 · 10−6 ¶ = 95.1V
La corrente media nel Mosfet è I = D · IL ed ha come valore massimo:
Imax= Dmass·IL max = Dmass·
V0 max
Rc· (1 − Dmass)
= 0.747· 95
80 · (1 − 0.747) = 3, 51A
Cap. 2 Progetto del convertitore Boost iM max = IL max+ ∆IL max 2 = V0 max Rc· (1 − Dmass)
+V0 max· Dmass· (1 − Dmass) · Ts
2 · L =
= 95
80 · (1 − 0.747)+
95 · 0.747 · (1 − 0.747) · 10−4
2 · 2 · 10−3 = 5.14A
La corrente massima nel diodo è uguale a quella del Mosfet, quindi
iDmax = 5.64A. La corrente media nel diodo ha come valore massimo:
ID max=
V0 max
Rc
= 95
80 = 1.2A
2.8
Ondulazione della corrente d’ingresso
Per ridurre l’ondulazione in ingresso è necessario inserire una capacità Caa
monte del chopper. Per dimensionare correttamente la capacità dobbiamo conoscere il valore efficace della componente alternata della corrente di
in-gresso iL. Quest’ultima può essere scomposta come somma di una corrente
continua IL e di un ripple con forma d’onda triangolare di ampiezza ∆IL.
Allora il valore efficace della componente alternativa può essere calcolato come: IL,ALT = ∆IL 2 ·√3 = Vin· D · Ts L · 2 ·√3 = Vin· (V0− Vin) · Ts V0· L · 2 · √ 3 (2.18)
La relazione 2.18 presenta il massimo per Vin = Vinmax e V0 = V0max con
IL,ALT = 0.32A.
Come capacità Ca è sufficiente usare un condensatore elettrolitico con
le seguenti caratteristiche:
• C = 220µF ;
• Vn = 100V ;
• ESR = 0.2Ω;
• Ic∼,100Hz,105◦C = 610mA;
É da osservare che se Ca ¿ Cin a valle della sorgente di alimentazione,
il funzionamento del raddrizzatore rimane praticamente invariato.
Con il dimensionamento della capacità di ingresso si conclude la parte di progetto riguardante gli elementi reattivi del convertitore, riassunti di seguito:
Cap. 2 Progetto del convertitore Boost
• L = 2mH;
• C0 = 470µF ;
• Ca= 220µF .
Il prossimo capitolo sarà dedicato alla scelta dei dispositivi a semicon-duttore necessari all’implementazione dell’interrutore.
Capitolo 3
Analisi e scelta dei componenti
3.1
Introduzione
Alla luce di quanto detto nel capitolo precedente, saranno adesso scelti i semiconduttori costituenti il tasto del chopper, ovvero la coppia transis-tore/diodo, e sarà analizzata la relativa circuiteria di pilotaggio. Quest’ul-tima ha il compito di accelerare il passaggio del Mosfet dallo stato di interdizione a quello di saturazione e viceversa, al fine di migliorare le commutazioni.
Particolare attenzione sarà rivolta anche ai dissipatori termici: il pro-blema della dissipazione e dell’aumento della temperatura interna è infatti di primaria importanza quando si lavora con dispositivi di potenza, siano essi BJT, MOS, integrati o diodi.
3.2
Scelta dei semiconduttori
In tabella 3.1 sono riportate le sollecitazioni massime cui sono sottoposti i semiconduttori.
Mosfet Diodo
iM max Imax VDSmax iDmax IDmax VDmax
5.14 A 3, 51 A 95.1 V 5.14 A 1.2 A 95.1 V
Tabella 3.1: Sollecitazioni massime.
Come mosfet si può utilizzare l’Hexfet IRF540N della International
Cap. 3 Analisi e scelta dei componenti
• Tensione nominale: 100V. • Corrente nominale : 33A. • Resistenza RDSon: 44mΩ.
Il mosfet IRF540N ha una corrente massima molto più alta di quella riportata in tabella perchè sul mercato non sono facilmente reperibili mosfet con tensioni nominale di 100 V e correnti nominali piccole.
Nella scelta del diodo uno dei parametri più importanti è il tempo di recupero: bisogna che questo sia minimo al fine di ridurre le perdite di commutazione. I diodi che godono di questa caratteristica sono denominati Schottky, come il PBY10100 della Philips di cui riportiamo le principali caratteristiche:
• Tensione inversa massima: 100V. • Corrente nominale continua: 10A.
• Caduta di tensione diretta massima: 0.7 V. • Tempo di recupero: trascurabile.
Il PBY10100 è quindi adatto allo scopo in quanto permette di lavorare a tensioni e frequenze elevate.
In appendice sono riportati i data-sheet dei componenti utilizzati.
3.3
Dimensionamento del dissipatore del mosfet
La potenza dissipata in un dispositivo si trasforma in calore e provoca un innalzamento della temperatura delle giunzioni. Questa temperatura
non deve superare il limite superiore TJ(max) che per il silicio è compreso
fra 120◦C e 200◦C. La potenza dissipata nel mosfet durante i processi di
commutazione e conduzione può essere valutata con le relazioni (vedi anche fig. 3.1):
PT = Pcond+ PSwitch= fs· ton· RDS(on)· i2on+
fs
2 · (tR+ tF) · ion· VDS(of f ) dove:
Cap. 3 Analisi e scelta dei componenti
Figura 3.1: Commutazione del Mosfet.
• tF = td(of f )+ tf (Turn-Off Delay Time + Fall Time).
Le perdite per conduzione possono essere anche valutate come:
Pcond = Ief f2 · RDS(on) (3.1)
e rappresentano il contributo maggiore alle perdite totali di un mosfet.
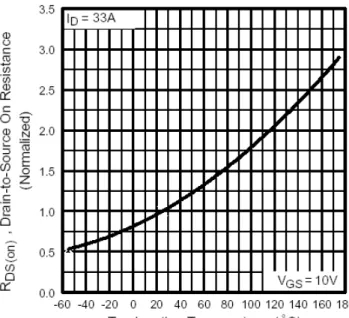
Nell’equazione 3.1 la resistenza RDS(on) è funzione di I, VGS e TJ
(tem-peratura della giunzione) che a sua volta dipende dalle perdite totali PT.
I costruttori forniscono il grafico della RDS(on) “normalizzata” in funzione
di TJ con il quale si può determinare velocemente la potenza dissipata e
la temperatura TJ. Prima di procedere con il calcolo delle perdite totali è
opportuno analizzare come è definita la resistenza RDS(on) normalizzata.
La potenza totale dissipata si può scrivere come:
PT = Pswitch+ Ief f2 · RDS(on) (3.2)
La 3.2 è valida per qualsiasi temperatura, quindi a 25◦C si può scrivere:
PT,25◦C = Pswitch+ Ief f2 · RDS(on)25◦C (3.3)
Nella relazione 3.3 è possibile ignorare la dipendenza di Pswitch dalla
temperatura perché generalmente è trascurabile. Riordinando la 3.2 e la 3.3 si ottiene:
PT − Pswitch = Ief f2 · RDS(on)
PT,25◦C − Pswitch = Ief f2 · RDS(on)25◦C = Pcond,25◦C (3.4)
Cap. 3 Analisi e scelta dei componenti PN = PT − Pswitch PT,25◦C − Pswitch = RDS(on) RDS(on)25◦C = RDS(on)N (3.5)
La perdita di conduzione normalizzata PN e la resistenza normalizzata
sono dunque coincidenti ed il loro andamento è rappresentato in fig 3.2.
Figura 3.2: Resistenza normalizzata RDS(on) .
Manipolando ulteriormente la 3.5 si ottiene:
PT = Pswitch+ PN · (PT,25◦C − Pswitch)
che, combinata con la 3.4, produce:
PT = Pswitch+ PN ·
¡
Ief f2 · RDS(on)25◦C
¢
(3.6) Prima di continuare si riporta la nomenclatura relativa alla teoria del-l’analogia termoelettrica, che consente di determinare con una certa facilità il valore della temperatura di giunzione per una certa potenza dissipata.
Un sistema di dissipazione del calore costituito dal chip in silicio, dal suo contenitore (case) e dal dissipatore (heatsink ), secondo l’analogia può essere rappresentato come in fig 3.3.
La potenza PD dissipata nel chip viene rappresentata come un
genera-tore di corrente, le temperature Tj, della base di montaggio del contenitore
Cap. 3 Analisi e scelta dei componenti 5 5 4 4 3 3 2 2 1 1 D D C C B B A A PD j T c T s T a T <Doc> <RevCode> <Title> Custom 1 1 Sunday, February 23, 2003 Title
Size Document Number Rev
Date: Sheet of
Figura 3.3: Analogia termoelettrica.
tensioni. Per tener conto delle differenze fra i vari punti si introducono le
resistenze termiche, indicate con i simboli RΘ.
Indichiamo con:
RΘJC resistenza termica tra giunzione e contenitore del dispositivo del
contenitore (Junction to Case);
RΘCH resistenza termica tra contenitore del dispositivo e dissipatore; dipende
dal tipo di montaggio (Case to Heatsink);
RΘHA resistenza termica tra dissipatore ed ambiente; è una caratteristica
intrinseca del dissipatore e dipende da vari fattori quali le dimensioni geometriche, il tipo di materiale etc.. (Heatsink to Ambient).
La temperatura ambiente TA è legata alla temperatura di giunzione TJ
dalle relazioni:
TJ = TA+ RΘJA· PT (3.7)
RΘJA = RΘJC + RΘCH + RΘHA (3.8)
Combinando la 3.7 con la 3.6 si ottiene:
TJ = TA+ RΘJA · ¡ Pswitch+ PN · ¡ I2 ef f · RDS(on)25◦C ¢¢ (3.9) La 3.9 rappresenta l’equazione di una retta che può essere tracciata direttamente sulla curva della resistenza di canale normalizzata fornita dal
Cap. 3 Analisi e scelta dei componenti costruttore; l’intersezione tra le due curve produce in ascissa la temperatura
di giunzione TJ ed in ordinata la potenza normalizzata PN, nota la quale,
dalla 3.6 si ricava la potenza totale dissipata.
Nella pratica la 3.9 si usa per dimensionare il dissipatore, ossia per determinare la sua resistenza termica, in quanto tutti i termini sono noti
tranne PN, TJ e la resistenza termica del dissipatore RΘHA; per poter
trac-ciare la retta si deve fissare uno dei termini. Solitamente si fissa un valore plausibile della resistenza termica e quindi si traccia la retta rappresentata dalla 3.9 sul grafico di fig. 3.2; dall’intersezione si ricava la temperatura di
giunzione che deve essere adeguatamente inferiore a quella massima (175◦C
nel nostro caso).
Se TJ > TJmax, allora si sceglie un valore inferiore della suddetta
re-sistenza termica (dissipatore più grande) e si ripete il tutto. Determinata una temperatura di giunzione accettabile, si legge sul grafico il valore
cor-rispondente di PN e si ricava PT tramite la 3.6.
Prima di procedere nel calcolo della resistenza del dissipatore si cal-colano le perdite di commutazione:
PSwitch = fs 2 ·(tr+tf)·ion·VDS(of f ) = 104 2 ·(46+84)·10 −9·5.14·95.1 = 0.31W
Porre ion pari a iM max equivale a mettersi nelle peggiori condizioni.
Dai data-sheet si ricava che RDS(on) = 0.044Ω ed assumendo TA= 25◦C,
dalla 3.9 si ha:
TJ = 25 + RΘJA·
¡
0.31 + RDS(on)N · 3.512· 0.044
¢
Supponendo RJA = 10◦C/W ed applicando il metodo grafico appena
descritto si ricava:
• TJ = 100◦C ;
• PN = 1.75 ;
• PT = 0.85W .
Dai data-sheet si ha che RΘJC = 1.7◦C/W , RΘCH = 0.5◦C/W (nel caso
di utilizzo di grasso termoconduttore fra integrato e dissipatore) e dalla 3.8 si ricava:
Cap. 3 Analisi e scelta dei componenti
RΘHA≤ 10 − 1.7 − 0.5 = 7.8
◦C
W
Sarà utilizzato un dissipatore con RΘHA = 7◦C/W .
3.4
Dimensionamento del dissipatore del diodo
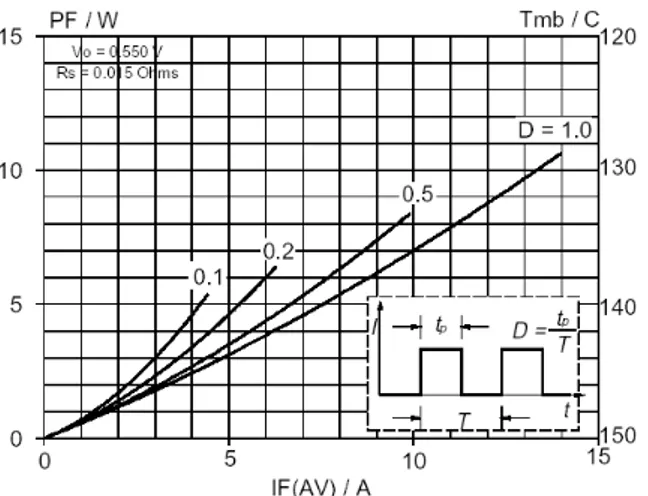
La massima corrente media nel diodo vale IDmax = 1.2A . Dal grafico di
fig. 3.4 si ha che PF ' 1W . Dai data-sheet si ha che TJ = 150◦C ed
assumendo TA = 25◦C si ottiene: RΘJA ≤ (TJ− TA) PF = (150 − 25) 1 = 125 ◦C W
Sempre dai data-sheet si ha che la resistenza fra giunzione e ambiente
senza dissipatore vale 60◦C/W , quindi si può anche evitare di montare il
dissipatore. Per sicurezza è convieniente usare un dissipatore con resistenza
termica RΘHA= 25◦C/W .
Figura 3.4: Dissipazione di potenza su diodo soggetto ad un’onda quadra di corrente.
3.5
Driver di pilotaggio del Mosfet
Il circuito di pilotaggio (driver) ha il ruolo di accendere e spegnere in tempi brevi il Mosfet interruttore della sezione di potenza. Come è noto, il Mosfet si differenzia dal Bjt per la capacità di controllare la corrente di u scita tramite una tensione (fig. 3.5).
Cap. 3 Analisi e scelta dei componenti
Figura 3.5: Bjt pilotato in corrente e Mosfet pilotato in tensione.
Teoricamente non scorre alcuna corrente nel gate, se non dell’ordine del nanoampere. In realtà per raggiungere la commutazione completa si deve passare attraverso una fase nella quale si caricano le capacità parassite tra Gate e Source e fra Gate e Drain. La velocità di commutazione dipende quindi dalla velocità di carica e scarica delle suddette capacità.
Normalmente nei data-sheet dei Mosfet è presente il parametro QG, che
indica la quantità di carica che è necessario fornire al gate e dalla quale si risale alla potenza dissipata (Capacitive Load Power Dissipation):
PC = VGS∗ QG∗ f
dove f è la frequenza di commutazione.
I driver possono raggrupparsi essenzialmente in due categorie:
• driver non alimentati; • driver alimentati.
I driver di gate sprovvisti d’alimentazione propria sono i più semplici da un punto di vista circuitale. La caratteristica principale risiede nella presenza di un dispositivo di disaccoppiamento che blocca la componente continua. Un notevole vantaggio del driver non alimentato è l’isolamento galvanico operato dal trasformatore che lo rende idoneo per quelle appli-cazioni in cui il dispositivo pilotato presenti il terminale di source flottante come nel caso del Buck e Buck-Boost. L’inconveniente di questo driver è dovuto alla velocità di commutazione non molto elevata.
I driver alimentati sono quelli più usati nelle applicazioni di potenza in cui si richiedono tempi di transizione molto contenuti al fine di ridurre le perdite di commutazione.
Cap. 3 Analisi e scelta dei componenti
3.5.1
Driver utilizzato
Il driver preso in considerazione è il MC34152 della Motorola. Si tratta di un driver dual-in-line, non invertente, disegnato appositamente per appli-cazioni che richiedono segnali di controllo a basse correnti ed alte frequenze di switching.
Il dispositivo, il cui schema di massima è rappesentato in fig. 3.6, ha le seguenti caratteristiche:
• 2 canali indipendenti, ciascuno con un totem pole di uscita; • ingressi CMOS/TTL compatibili;
• tensione operativa variabile da un minimo di 6.5V ad un massimo di
18V;
• tempi di salita e di discesa molto brevi (tipicamente 15 nS).
(Per ulteriori informazioni si rimanda ai data-sheet riportati in appen-dice).
Figura 3.6: Rappresentazione interna del driver MC34152.
La QG massima del nostro Mosfet è pari a 71nC, ma questo valore non
Cap. 3 Analisi e scelta dei componenti 3.7 riportante la tensione di gate in funzione della carica, vi sono tre fasi nettamente distinte tra loro.
Figura 3.7: Curva di carica per il IRF540N.
Nella regione piatta, fra 10 e 25 nC, all’aumentare della carica fornita, la tensione sul gate resta pressochè costante. Questo fenomeno è dovuto
alla capacità di Miller CGD che entra in gioco ad una determinata tensione
ed il cui valore è funzione della tensione stessa (fig. 3.8). Tutto ciò porta ad un rallentamento della commutazione, come illustrato in fig. 3.9.
Alimentando il driver a 12V, siamo in grado di calcolare la potenza dissipata durante una commutazione dallo stato Off allo stato On:
PC = VGS∗ QG∗ f = 12 ∗ 71 ∗ 10−9∗ 10000 = 8, 52mW
Il MC34152 è in grado di erogare una corrente tale da fornire la potenza necessaria al gate per effettuare la commutazione in tempi molto brevi.
Di seguito sono elencati i componenti presi in considerazione in questo capitolo:
Transistore IRF540N (International Rectifier ; Diodo PBY10100 (Philips);
Cap. 3 Analisi e scelta dei componenti
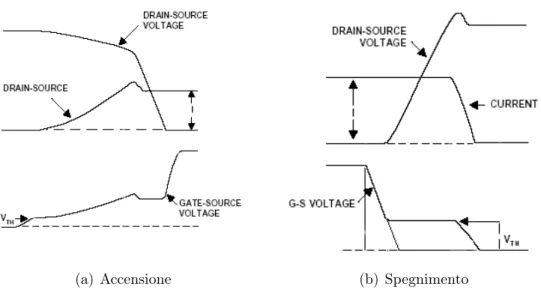
Figura 3.8: Dipendenza della VGS dalle capacità CGS e CGD.
(a) Accensione (b) Spegnimento
Capitolo 4
Montaggio del convertitore
4.1
Introduzione
La fase di progetto ha riguardato quelli che sono i componenti principali che costituiscono il convertitore. In fase di montaggio è necessario tenere conto di alcuni aspetti circuitali fodamentali per il corretto funzionamento del dispositivo. In questo capitolo sarà trattata l’elettronica di contorno per l’interruttore e per il driver del mosfet, oltre a citare alcuni accorgimenti pratici utilizzati nel montaggio e le precauzioni d’utilizzo del convertitore.
4.2
Circuiteria per il driver
Il driver MC34252 necessita di una tensione di alimentazione compresa fra 6.5V e 18V e potrebbe essere prelevata direttamente dalla tensione di ingresso tramite un partitore. La sorgente di alimentazione, però, può variare dai 24V ai 35V, quindi se vogliamo una tensione fissa è necessario l’utilizzo di un regolatore. In laboratorio è presente l’integrato µA7812 della Texas Instruments il quale, se alimentato con una tensione compresa fra i 14.5V e i 30V, fornisce in uscita 12V stabilizzati.
La massima tensione di ingresso al convertitore è maggiore della massi-ma tensione operativa del regolatore, per cui è stato posto un diodo zener di protezione in serie al regolatore. Il diodo scelto è il C6V2PH della Philips che ha una tensione di polarizzazione inversa pari a 6.2V. In questo modo la tensione di ingresso al µA7812 sarà sempre compresa fra 17.8V e 28.8V.
É raccomandabile porre alcune capacità di bypass fra il piedino Vcc del
driver e massa, per diminuire eventuali disturbi. Come consigliato dai data-sheet, sono state inserite in parallelo due capacità, una da 0.1µF ceramica
Cap. 4 Montaggio del convertitore e una da 4.7µF al tantalio. Per lo stesso motivo è stata posta una capacità da 0.33µF ai capi dell’alimentazione del regolatore. Lo schema complessivo è riportato in fig. 4.1. 5 5 4 4 3 3 2 2 1 1 D D C C B B A A
0.33u 0.1u 4.7u
Dz Vin + -Mosfet <Doc> <RevCode> <Title> Custom 1 1 Monday, February 03, 2003 Title
Size Document Number Rev
Date: Sheet of MC34152 B1 B2 B3 B4 A1 A2 A3 A4 UA7812 IN G N D OUT
Figura 4.1: Driver MC34152 e suo regolatore di alimentazione.
4.3
Circuiteria per il Mosfet
Per ridurre il fastidioso problema delle oscillazioni parassite ad alta fre-quenza, causate dalla capacità di ingresso del Mosfet e dagli inevitabili fenomeni induttivi della circuiteria, è necessario porre una resistenza in
serie al gate (Rg). Un diodo Schottky (D1), posto fra l’uscita del driver
e la massa, serve a ridurre la potenza dissipata dal driver in presenza dei suddetti fenomeni oscillatori. Dopo alcune prove sperimentali, la scelta dei
componenti è ricaduta sul 1N5819 per D1 e 47Ω per Rg.
In figura 4.2 è rappresentato un turn-off snubber, circuito utilizzato per limitare le perdite di commutazione nel mosfet.
5
4
3
2
1
D
D
C
C
B
B
A
A
Cs
Rs
Ds
<Doc> <RevCode> <Title> Custom 1 1 Saturday, February 01, 2003 TitleSize Document Number Rev
Date: Sheet of
Figura 4.2: Circuito di snubber per il mosfet.
Il gruppo Rs Cs limita la velocità di variazione della tensione VDS, per
cui durante lo spegnimento del mosfet, quando la corrente di drain non si Pag. 38
Cap. 4 Montaggio del convertitore
è ancora annullata, la tensione VDS non passa istantaneamente al valore
massimo come illustrato in fig. 4.3 .
Figura 4.3: Effetto dello snubber sulla VDS.
La potenza totale dissipata nel processo di commutazione non varia con l’introduzione dello snubber in quanto la potenza che in assenza di snubber
era dissipata nel mosfet, adesso è dissipata nella resistenza Rs. Anche se
non migliora l’efficienza delle commutazioni, il mosfet è salvaguardato da eventuali sovratensioni e quindi miglioriamo l’affidabilità del circuito. La
resistenza Rs è scelta in modo che la capacità Cs si scarichi in un tempo
minore di ton(min) (tempo minimo in cui il mosfet resta acceso).
Indicando con tf il tempo si spegnimento del mosfet si dovrà avere:
Cs= Imax· tf VDS max (4.1) Rs= ton(min) 2 · Cs
Dai data-sheet riportati in appendice abbiamo tf = 47ns (dato dalla
somma di Turn-off Delay Time e Fall Time) , mentre ton(min) lo assumiamo
uguale a 100 ns.
Sostituendo quindi nella 4.1 otteniamo:
Cs= 2.78 · 47 · 10
−9
95.1 = 1.4nF
Scegliendo una capacità di 2.2nF , il valore di Rs sarà 22Ω. Lo schema
Cap. 4 Montaggio del convertitore
5
5
4
4
3
3
2
2
1
1
D
D
C
C
B
B
A
A
Cs Rs Ds Rg DgDriver
M <Doc> <RevCode> <Title> Custom 1 1 Sunday, February 02, 2003 TitleSize Document Number Rev
Date: Sheet of
Figura 4.4: Circuiteria per il mosfet.
4.4
Dimensionamento del fusibile di protezione
Per proteggere il circuito da eventuali guasti è necessario inserire un fusibile di protezione. La corrente massima che scorre sull’induttanza è pari a 5.14A, per cui è stato scelto un fusibile da 6A.
5 4 3 2 1 D D C C B B A A Sezione di Potenza F Pilotaggio Vin + -Carico <Doc> <RevCode> <Title> Custom Title
Size Document Number Rev
Figura 4.5: Posizionamento del fusibile
Dalla fig. 4.5 si nota che l’elemento di protezione scollega dall’alimen-tazione solamente la parte di potenza. É quindi possibile effettuare dei test sulla parte di controllo indipendentemente dal resto del circuito.
4.5
Costruzione del prototipo
Il prototipo è stato realizzato nell’officina elettronico-informatica del di-partimento di Sistemi Elettrici ed Automazione e lo schema elettrico com-plessivo è mostrato in fig. 4.6. La costruzione ha tenuto conto di alcuni Pag. 40
Cap. 4 Montaggio del convertitore accorgimenti pratici che hanno reso possibile la sperimentazione ; in parti-colare, la tensione di ingresso, il carico, l’induttanza e le due capacità sono state connesse al nucleo mosfet/diodo tramite dei morsetti. In alcuni punti del circuito, inoltre, sono stati posti dei “test point” per poter misurare facilmente le grandezze elettriche più importanti del convertitore.
5 5 4 4 3 3 2 2 1 1 D D C C B B A A Rc Co L D Vin V0 + -VD +
-0.33u 0.1u 4.7u
Dz Cs Rs Ds Rg Dg M + Ca F 1
Schema circuitale complessivo Boost Converter
1 1
Monday, February 03, 2003 Title
Size Document Number Rev
Date: Sheet of UA7812 IN G N D OUT MC34152 B1 B2 B3 B4 A1 A2 A3 A4
Figura 4.6: Schema elettrico complessivo del Boost converter.
4.6
Precauzioni d’utilizzo
La tensione nominale dei convertitori è stata determinata tenendo presente che il sistema deve essere costruito su di una scheda dove i terminali dei componenti e le piste del circuito stampato sono direttamente accessibili e non isolati.
Utilizzando questo tipo di costruzione, senza adottare altri dispositivi di sicurezza, la tensione deve essere necessariamente contenuta per rispettare le norme di sicurezza CEI 64-8. Queste affermano che in condizioni am-bientali ordinarie la protezione contro i contatti diretti si ritiene assicurata (anche se le parti attive sono nude) se la tensione nominale non supera
Cap. 4 Montaggio del convertitore
Figura 4.7: Foto del convertitore finale.
25 V in corrente alternata e 60 V in corrente continua. Per valori di ten-sione superiori ai valori indicati la protezione contro i contatti diretti deve essere assicurata mediante barriere, involucri o isolamenti.
Il dispositivo realizzato, avendo una tensione di ingresso compresa fra i 24 e i 35V ed una tensione massima di uscita di 90V, dovrà quindi essere dotato di un contenitore metallico collegato a terra. Quest’ultimo dovrà essere chiuso tutte le volte che si prevede di superare i 25V in ingresso o i 60 V in uscita. Particolare attenzione dovrà essere fatta nell’effettuare le misure, chiudendo sempre il contenitore metallico in modo da creare una barriera che impedisca il contatto diretto con le parti in tensione.