1
G
ENERALITÀ DEL RADAR
OTH
1.1
Introduzione
I primi studi in materia radar furono iniziati prima della seconda guerra mondiale, e furono compiuti per frequenze che non superavano i pochi MHz, a causa dei vincoli tecnologici dell’epoca, che non rendevano possibile costruire apparati funzionanti a frequenze più elevate [1]. Questi studi erano forti dell’esperienza accumulata negli anni precedenti con gli studi sulle onde radio,merito tra gli altri dell’italiano Guglielmo Marconi. Egli aveva infatti per primo aveva intuito la possibilità di collegare tramite un ponte radio punti fra loro non in visibilità ottica, sfruttando il fenomeno della riflessione delle onde elettromagnetiche sulla ionosfera.
Con il raffinarsi delle tecnologie, ed in particolare con l’invenzione del magnetron, le frequenze più basse vennero abbandonate sia per le difficoltà legate all’ingombro degli apparati in questa banda, sia per la limitata possibilità di discriminare bersagli rispetto al rumore, in favore di frequenze più elevate che meglio si prestavano a impieghi pratici. La digitalizzazione dei componenti permise di creare filtri con una banda passante molto più ridotta rispetto al passato, e quindi in grado di discriminare mezzi in movimento a velocità molto inferiori, come ad esempio le navi, altrimenti totalmente immerse nel rumore e quindi non rivelabili. I sistemi radar si sono infatti affermati nel campo delle microonde, nel quale hanno trovato la loro maggiore applicazione [1]. Lo studio dei sistemi in banda HF non fu tuttavia abbandonato, ma assunse importanza nel campo dello studio di sistemi ad elevatissima portata, nel campo del remote sensing e per controbattere alle tecnologie stealth sviluppate ingannare i radar tradizionali a frequenze più elevate. Uno dei vantaggi principali dei radar in banda HF è che essi permettono delle portate maggiori di quanto consentito dai radar tradizionali, limitati per loro natura dall’orizzonte ottico (Figura 1-1).
Figura 1-1 zona di copertura di un radar tradizionale [2]
La necessità di aumentare la portata dei sistemi di sorveglianza è nata in seguito al raffinarsi dei moderni sistemi militari, in cui è fortemente aumentata la velocità d’attacco, con la conseguente necessità di scoprire le possibili minacce ad una sempre maggiore distanza, nell’ottica di mantenere un margine sufficiente per ipotizzare una contromisura.
Il radar in banda HF si pone anche come una valida alternativa ai satelliti per effettuare scansioni oltre l’orizzonte, con un conseguente indubbio vantaggio strategico [2]. In questo caso inoltre si riduce notevolmente il tempo di visita del sito di interesse, che passa dai 30 giorni in media per un satellite ISAR ad un tempo dell’ordine dell’ora. Oltre a questi obiettivi militari si può ipotizzare un utilizzo della tecnologia OTH anche per applicazioni di monitoring ambientale, osservando ampie porzioni di territorio alla volta. Attraverso un sensore di questo genere si può osservare l’evolversi di vari fenomeni meteorologici, come ad esempio una tempesta, o effettuare studi sulle correnti marine, osservando l’eco prodotto dalla superficie del mare, creando così un database di dati a cui attingere per ogni tipo di applicazioni.
Naturalmente esistono anche svantaggi nell’uso di questi apparati. Tra gli svantaggi è sicuramente necessario citare l’ingombro degli apparati per ottenere un guadagno sufficiente al loro utilizzo (il guadagno di un’antenna è infatti strettamente legato alla sua dimensione massima, parametro a sua volta direttamente proporzionale alla lunghezza d’onda) .
1.2
Principi di funzionamento
Il radar OTH concettualmente si basa sulla possibilità di far viaggiare le onde elettromagnetiche secondo precorsi non rettilinei, che seguono quindi la curvatura terrestre o sfruttano la riflessione ionosferica [1].
In Figura 1-2 viene presentato il principio di funzionamento di un radar OTH in configurazione Skywave.
Figura 1-2 configurazione di un radar OTH [2]
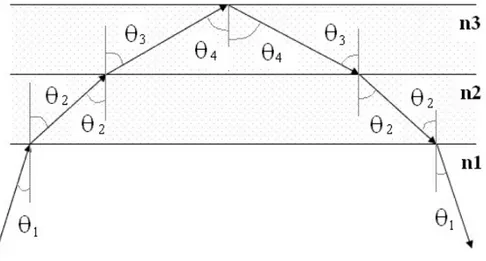
In questa configurazione il segnale viene generato e trasmesso dalla stazione di terra, e viaggia nell’atmosfera inalterato sino a raggiungere la ionosfera. A questo punto avviene la riflessione, dovuta alla differente densità elettronica nei vari strati ionosferici. La legge che regola questa interazione tra i diversi strati è la legge di Snell, secondo cui:
1 1 2 2 ( ) ( ) sen n sen n
θ
θ
= (1.1)in accordo con la Figura 1-3, dove n1 e n2 sono le concentrazioni ioniche dei diversi
Figura 1-3 geometria di riferimento della legge di Snell
Questa legge viene applicata ad ogni strato da cui è composta la ionosfera, fino a portare alla completa riflessione del raggio incidente come mostrato in Figura 1-4.
Figura 1-4 comportamento dei raggi al variare degli strati
La ionosfera è infatti composta da strati, che differiscono fra di loro per la concentrazione ionica, che comporta differenze nella velocità di propagazione del raggio elettromagnetico. Essi sono anche variabili dal giorno alla notte, come presentato in Figura 1-5, così come variano a seconda della stagione, della latitudine geografica e in relazione all’attività delle macchie solari [3].
Figura 1-5 andamento degli strati della ionosfera
I raggi dopo la riflessione viaggiano sino a terra, dove illuminano la superficie di interesse. Per poter variare la superficie illuminata riveste fondamentale importanza la scelta della frequenza da utilizzare. Nota infatti la distanza di collegamento risultano
determinati l’angolo di partenza e quello di incidenza sulla ionosfera (θi) che permette
di trovare la massima frequenza utilizzabile secondo la seguente legge:
0 cos( ) max i f k f
θ
= (1.2) 2 0 2 0 9 4 e e n f n mπ
ε
= ≅ (1.3)dove f0 è la frequenza critica al di sotto della quale non può esservi propagazione nel
mezzo, e è la carica dell’elettrone, me la sua massa, n la concentrazione elettronica e k
un parametro correttivo per compensare la natura curvilinea degli strati ionosferici [2]. Questo procedimento è svolto mediante i grafici di Ionosphere Prediction Chart (IPC),
che permettono di trovare le coppie frequenza-angolo di alzo tali da collegare le
distanze desiderate. La fmax costituisce un vincolo stringente per la riflessioni
ionosferica, il suo superamento comporterebbe la fuoriuscita dei raggi della ionosfera, con una conseguente dispersione delle onde elettromagnetiche nello spazio e mancato funzionamento di tutto l’apparato. Oltre ai vincoli fisici di trasmettibilità, che vincolano la frequenza da utilizzare, è necessario rispettare il piano delle frequenze disponibili su base nazionale, così da non interferire con canali occupati da altri utenti.
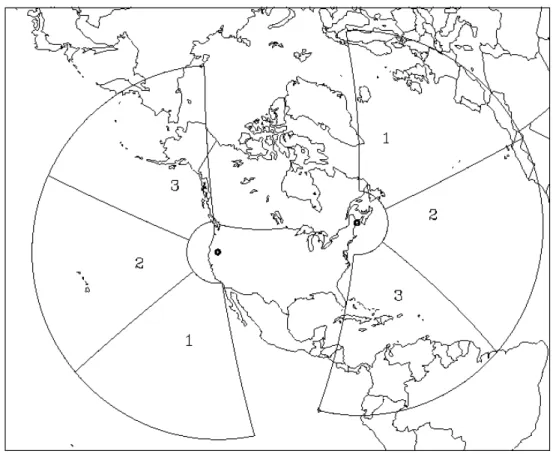
Facendo variare la frequenza operativa è dunque possibile illuminare distanze che vanno da 500 a 3000 kilometri, considerando la variazione di penetrazione delle onde e i differenti angoli di alzo di conseguenza utilizzabili, anche se non tutte le soluzione possono essere possibili in ogni momento, a causa della già citata natura variabile degli strati ionosferici [2]. Un esempio di copertura di un radar OTH è mostrato in Figura 1-6, in cui è riportato il sistema AN/FPS-118 OTH-B utilizzato negli USA, che permette una copertura da 900 a 3300 Km, su un fronte di 180°, divisi in 3 tronconi da 60° ciascuno, su entrambe le coste.
1.3
Possibili configurazioni
I radar OTH possono lavorare in diverse modalità [1]. La distinzione fondamentale può essere effettuata tra radar che lavorano con onda superficiale (Ground wave) e radar che lavorano mediante onda celeste (Skywave). I primi presentano il vantaggio di non avere un’ampia zona ceca nelle vicinanze del trasmettitore, ma hanno una portata fortemente limitata dalla distanza a cui si possono propagare le onde superficiali. Anche da valutare è l’impatto ambientale di questo genere di apparato, che comporta l’illuminazione continuata di porzioni di territorio, in banda HF a potenze non trascurabili. I sistemi Skywave di contro possono spingersi a distanze considerevolmente più elevate, ma la zona limitrofa al trasmettitore rimane senza illuminazione, in quanto i raggi elettromagnetici devono poter raggiungere la ionosfera e ridiscendere a terra per illuminare la zona di interesse. In questo caso anche l’irraggiamento del suolo è ridotto rispetto al caso precedente, considerando che le onde elettromagnetiche viaggiano perlopiù nell’atmosfera. Per risolvere il problema della portata è comunque possibile implementare un sistema misto, che abbina i vantaggi di ciascun sistema, seppure comportando un notevole aumento di complessità dell’apparato [2].
Un altro parametro di distinzione fra i diversi apparati radar è la presenza o meno di trasmettitori e ricevitori separati. Nel caso in cui le funzioni di trasmettitore e ricevitore siano svolte da un unico apparato si definisce il sistema monostatico, in caso contrario bistatico. Ciascuno di essi presenta vantaggi e svantaggi legati alle diverse fisicità. Il caso monostatico ha un minor impatto ambientale in termini di strutture da costruire, in quanto è presente una sola struttura che svolge entrambe le funzioni, ma di contro presenta problemi legati all’accoppiamento tra segnale trasmesso e ricevitore [2]. Il caso bistatico invece consente di isolare meglio fra loro il trasmettitore e il ricevitore, che vengono posti a grande distanza l’uno dall’altro, ma ciò ovviamente comporta la creazione di un numero maggiore di strutture con una maggiore occupazione del territorio [2]. Questo risulta già fortemente occupato anche nel caso monostatico in quanto, data per necessaria l’estrema strettezza del fascio in azimut, è richiesto di costruire strutture imponenti a terra per realizzare questo requisito. Le dimensione di un intero apparato radar di tipo OTH si misurano infatti nell’ordine dei kilometri, e
replicare una tale struttura in più luoghi per renderla multistatica può non essere sempre possibile.
1.4
Modalità di funzionamento del radar
Le possibili modalità di funzionamento di un radar OTH, utilizzato per sorveglianza a largo raggio, sono due: si può trattare una modalità di target
detection-estimation oppure di target track while scan [2].
Nel primo caso il radar svolge il compito di cercare di discriminare il segnale eco del bersaglio quando questo si trovi immerso nel clutter e nel rumore, in modo tale da poter estrarre i parametri di interesse del bersaglio. Essi sono in genere la distanza, le direzione di provenienza e la velocità radiale con cui si muove il bersaglio. Una volta immagazzinati questi dati essi possono essere usati per costituire una raccolta di dati, in modo da tenere costantemente, anche se a intervalli discreti, sotto sorveglianza l’evolversi dello scenario.
Nel secondo caso invece il radar stabilisce un primo punto di situazione, e cerca di mantenerlo aggiornato costantemente, in tempo reale rispetto alla scansione. In questa modalità di funzionamento il radar continua anche a cercare costantemente nuovi bersagli precedentemente non rivelati, all’interno del proprio range di copertura.
Il vantaggio del secondo apparato rispetto al primo è sicuramente l’assenza di ritardi dovuti alla caratteristica dell’impulso di essere a tempo finito, eliminando quindi i periodi in cui il radar non riceve echi. Di contro l’intero apparato risulta essere più complesso, in quanto risulta necessario un migliore disaccoppiamento tra gli elementi trasmittenti e quelli riceventi, e ciò comporta una maggiore spesa.
Per quanto riguarda i radar utilizzati per operazione di monitoring ambientale la modalità utilizzata è nuovamente quella target detection-estimation
1.5
Scopo dell’elaborato
Lo scopo dell’elaborato è di effettuare uno studio sul clutter di mare, in modo tale da determinarne la RCS e poter disporre di dati simulati che riguardino questo disturbo.
Per poter effettuare questo studio occorre innanzi tutto esprimere l’equazione del radar nella sua forma classica di rapporto segnale-disturbo:
2 3 4 0 (4 ) t t r p PG G T F S N N L R λ σ π = (1.4)
dove Pt rappresenta la potenza media trasmessa dall’antenna, Gt il guadagno della
stessa, Gr il guadagno del ricevitore, T il tempo di integrazione, λ la lunghezza d’onda
del radar, σ la RCS del bersaglio, Fp il fattore di propagazione, N0 la potenza del
disturbo esterno, L le perdite di percorso e di sistema, e (4π)3 R4 il fattore di
attenuazione dovuto alla distanza [1]. Nel caso poi in questione il fattore di propagazione si modifica per tenere in conto la propagazione ionosferica, che comporta un ulteriore perdita per spreading da considerare intorno a 40 dB [2]. Nel caso in cui si
voglia valutare il rapporto clutter to noise è sufficiente sostituire nella (1.4) σ con σc:
2 3 4 0 (4 ) t t r c p PG G T F C N N L R λ σ π = (1.5).
Moltiplicando la (1.5) per la potenza di rumore N0 si ottiene una stima secondo
l’equazione del radar della potenza di clutter ricevuta ai capi dell’antenna:
2 3 4 (4 ) t t r c p PG G T F C L R
λ σ
π
= (1.6).In altre parole la potenza di clutter ricevuta ai capi dell’antenna dipende dai parametri del sistema, dalla distanza e dalla RCS del area illuminata, detto anche bersaglio distribuito. Il calcolo di questa quantità è di fondamentale importanza al fine di prevedere le performances dell’apparato e risulta fortemente correlato con lo stato del mare e sarà oggetto dello studio.
Come si vedrà nel capitolo 4 per calcolare la RCS della superficie marina è necessario conoscere lo spettro marino, parametro da cui dipende fortemente il segnale re irradiato dal mare e di conseguenza la RCS. Esso verrà studiato analiticamente nel capitolo 2,
mentre nel capitolo 3 verranno presentati alcuni tra i modelli utilizzati per studiare questo fenomeno, in funzione dello stato del mare, a sua volta dipendente dalle condizioni di vento. Si passerà quindi nel capitolo 4 a studiare il modello del segnale
back-scatterato sempre in funzione dello stato del mare, attraverso i modelli
precedentemente proposti. Nel capitolo 5 infine si descriverà un metodo di generazione del segnale re-irradiato da una superficie estesa in movimento. I risultati relativi ad un caso di studio saranno esposti nel capitolo 6 al fine di validare i modelli proposti.
![Figura 1-1 zona di copertura di un radar tradizionale [2]](https://thumb-eu.123doks.com/thumbv2/123dokorg/7354436.93579/2.892.194.747.138.418/figura-zona-copertura-radar-tradizionale.webp)
![Figura 1-2 configurazione di un radar OTH [2]](https://thumb-eu.123doks.com/thumbv2/123dokorg/7354436.93579/3.892.189.747.388.748/figura-configurazione-radar-oth.webp)