Sistema di Misura del Ciclo di Isteresi
in Media Frequenza
Andrea Biggi
16 aprile 2007
Introduzione
Il seguente lavoro descrive un nuovo metodo di misura del ciclo di isteresi magnetica per ferriti soffici in media frequenza. Le frequenze interes-sate vanno da pochi Kilohertz al Megahertz. Il metodo realizzato per saturare il campione di ferrite sotto esame utilizza la risonanza tra l’induttanza propria
della ferrite ed un condensatore di oscillazione postole in parallelo. Questo
metodo garantisce la generazione di correnti di ampiezza e frequenza tali da saturare la ferrite attraverso un circuito molto economico se paragonato ai metodi attualmente utilizzati.
Il lavoro comincia con la presentazione delle motivazioni che hanno spinto alla realizzazione del progetto, in seguito vengono descritti i tre prototipi di scheda realizzati. Un capitolo a parte `e riservato alla validazione del
sistema cio`e alla presentazione delle misure ottenute con ciascuna delle schede
realizzate. Si concluder`a esponendo i limiti del sistema e alcuni suggerimenti per superarli.
La parte pratica, la realizzazione dei circuiti e la loro messa a punto `e stata realizzata presso i laboratori della “Universidad Pontificia Comillas, ICAI” di Madrid.
Parole chiave
Isteresi magnetica, risonanza, basso costo, ferrite soffice, media frequenza.
Indice
1 Inquadramento generale del progetto 7
1.1 Misura generale di isteresi . . . 7
1.2 Isteresi magnetica . . . 9
1.2.1 L’isteresi in generale . . . 9
1.2.2 Materiali ferromagnetici . . . 10
1.2.3 Perch´e caratterizzare una ferrite in alta frequenza . . . 13
2 Metodo classico 15 3 Sistema proposto 16 3.1 Primo stadio di sviluppo . . . 16
3.2 Idea di principio del secondo stadio di sviluppo . . . 21
4 Descrizione fisica dei circuiti 25 4.1 Scheda ”metodo classico” . . . 26
4.2 Scheda 1 . . . 28
4.2.1 Componenti utilizzati e funzionamento . . . 30
4.2.2 Problemi riscontrati . . . 35
4.3 Scheda 2 . . . 36
4.3.1 Componenti utilizzati e funzionamento . . . 37
4.3.2 Problemi riscontrati . . . 39
4.3.3 Commenti . . . 43
4.4 Scheda 3 . . . 44
5 Validazione del sistema 46 5.1 Metodo classico . . . 50 5.1.1 Misure . . . 50 5.1.2 Commenti . . . 52 5.2 Scheda 1 . . . 53 5.2.1 Misure a 7 KHz . . . 53 5.3 Scheda 2 . . . 59 2
INDICE 3
5.3.1 Misure a 7 KHz . . . 59
5.3.2 Misure a 50 KHz . . . 70
5.4 Scheda 3 . . . 74
5.4.1 Misure a 100 KHz . . . 74
5.5 Parallelo tra classico e nuovo in bassa frequenza . . . 78
6 Limiti del sistema proposto e suggerimenti per superarli 80 A Listati programmi assembler 82 A.1 Programma 7 KHz . . . 82
A.2 Programma 50 KHz . . . 86
Elenco delle figure
1.1 Ciclo di isteresi di un materiale ferromagnetico . . . 9 1.2 Curve di magnetizzazione di materiali magnetici e non magnetici. 11 1.3 Esploso del provino di ferrite usato. . . 14 3.1 Andamento della corrente nel primario della ferrite; risulta
evidente la dissimmetria tra i livelli di saturazione positivo e negativo raggiunti . . . 17 3.2 Ciclo di isteresi parziale in medio-bassa frequenza ottenuto al
precedente stadio di sviluppo. . . 18 3.3 Circuito usato nel primo stadio di sviluppo. . . 19 3.4 Circuito proposto con parte di aiuto negativa . . . 22 3.5 Istante di inizio dell’impulso di controllo della parte di aiuto
negativa. . . 24 4.1 Schema di principio del metodo classico . . . 26 4.2 Fotografia della scheda che implementa il metodo classico . . . 27 4.3 Fotografia del provino di ferrite nella morsa . . . 27 4.4 Schematico della prima scheda utilizzata (scheda1) . . . 28 4.5 Fotografia della prima scheda utilizzata . . . 29 4.6 Regolatore di tensione con i due condensatori di ingresso e uscita 30 4.7 Scheda di programmazione del PIC, ”PICkit1 FLASH
STAR-TER KIT” . . . 31 4.8 Connessione tipica del driver ”IR2110” . . . 35 4.9 Schematico della seconda scheda utilizzata (scheda2) . . . 36 4.10 Schematico del circuito per la misura della corrente nel
prima-rio della ferrite . . . 38 4.11 Schermata di confronto tra gli impulsi in uscita dal PIC ed in
ingresso ai MOS . . . 39 4.12 Rappresentazione schematica di confronto tra gli impulsi in
uscita dal PIC ed in ingresso al MOS della parte negativa . . . 40
ELENCO DELLE FIGURE 5 4.13 Rappresentazione schematica di confronto tra gli impulsi in
uscita dal PIC ed in ingresso al MOS della parte positiva . . . 40
4.14 Rappresentazione schematica degli impulsi in uscita dal PIC, di quelli che arrivano ai MOS (VGS) e della corrente nel pri-mario della ferrite . . . 41
4.15 Impulsi in uscita dal PIC ed in ingresso al MOS, per la parte positiva . . . 42
4.16 Impulsi in uscita dal PIC ed in ingresso al MOS, per la parte negativa . . . 42
4.17 Schematico della terza versione della scheda . . . 44
5.1 Rappresentazione della sonda ad effetto Hall . . . 47
5.2 Oscilloscopio usato nelle misure . . . 48
5.3 Andamento del campo H nella misura fatta con il metodo classico . . . 50
5.4 Andamento del induzione B nella misura fatta con il metodo classico . . . 51
5.5 Ciclo di isteresi nella misura fatta con il metodo classico . . 51
5.6 Campo magnetico H ricavato con la scheda1 alla frequenza di 7 KHz . . . 53
5.7 Induzione magnetica B ricavata con la scheda1 alla frequenza di 7 KHz . . . 54
5.8 Ciclo di isteresi ricavato con la scheda1 alla frequenza di 7 KHz 54 5.9 Campo magnetico H “tagliato” ricavato con la scheda1 alla frequenza di 7 KHz . . . 56
5.10 Induzione magnetica B “tagliata” ricavata con la scheda1 alla frequenza di 7 KHz . . . 57
5.11 Ciclo di isteresi “tagliato” ricavato con la scheda1 alla fre-quenza di 7 KHz . . . 57
5.12 Impulsi RA0 ed RA1 generati dal PIC per le misure a 7 KHz . . 58
5.13 Induzione magnetica B (Tesla) in funzione del tempo ( µs) misurata su scheda2 a 7 KHz . . . 60
5.14 Campo magnetico H (A m) in funzione del tempo ( µs) misurato su scheda2 a 7 KHz . . . 60
5.15 Ciclo di isteresi ( T vs. A m) misurato su scheda2 a 7 KHz . . . 61
5.16 Induzione magnetica B (Tesla) ”tagliata” in funzione del tem-po ( µs) misurata su scheda2 a 7 KHz . . . 61
5.17 Campo magnetico H (A m) ”tagliato” in funzione del tempo ( µs) misurato su scheda2 a 7 KHz . . . 62
5.18 Ciclo di isteresi ( T vs. A m) misurato su scheda2 a 7 KHz . . . 62
ELENCO DELLE FIGURE 6 5.19 Induzione magnetica B (Tesla) in funzione del tempo ( µs)
misurata per ricavare il minor loop su scheda2 a 7 KHz . . . . 64 5.20 Campo magnetico H (A
m) in funzione del tempo ( µs) misurato
per ricavare il minor loop su scheda2 a 7 KHz . . . 65 5.21 Minor loop ( T vs. A
m) misurato su scheda2 a 7 KHz . . . 65
5.22 Induzione magnetica B (Tesla) ”tagliata” in funzione del tem-po ( µs) misurata su scheda2 a 7 KHz . . . 66 5.23 Campo magnetico H (A
m) ”tagliato” in funzione del tempo
( µs) misurato su scheda2 a 7 KHz . . . 66 5.24 Minor loop ( T vs. A
m) misurato su scheda2 a 7 KHz . . . 67
5.25 Misura asimmetrica dell’induzione magnetica B (Tesla) misu-rata su scheda2 a 7 KHz . . . 68 5.26 Misura asimmetrica del campo magnetico H (A
m) in funzione
del tempo ( µs) misurato su scheda2 a 7 KHz . . . 69 5.27 Ciclo di isteresi asimmetrico ( T vs. A
m) misurato su scheda2
a 7 KHz . . . 69 5.28 Induzione magnetica B (Tesla) misurata su scheda2 a 50 KHz 71 5.29 Campo magnetico H (A
m) misurato su scheda2 a 50 KHz . . . 71
5.30 Ciclo di isteresi ( T vs. A
m) misurato su scheda2 a 50 KHz . . 72
5.31 Minor loop misurato su scheda2 a 50 KHz . . . 73 5.32 Induzione magnetica B misurata su scheda3 a 100 KHz . . . 74 5.33 Campo magnetico H misurato su scheda3 a 100 KHz . . . 75 5.34 Isteresi magnetica totale misurata su scheda3 a 100 KHz . . . 76 5.35 Isteresi ricavata da B ed H oppurtunamente tagliati, misurata
su scheda3 a 100 KHz . . . 77 5.36 Confronto tra il ciclo di isteresi ricavato col metodo classico e
Capitolo 1
Inquadramento generale del
progetto
La caratterizzazione del ciclo d’isteresi magnetica per piccoli nuclei di ferrite dolce pu`o risultare semplicemente ottenibile a basse frequenze, tuttavia per valori compresi tra 30 KHz ed il Megahertz il set-up sperimentale necessario pu`o essere particolarmente dispendioso e di difficile ottenimento [3], [4], [5], [6].
Al momento sono in fase di studio differenti soluzioni che permettano di risolvere il problema. Il metodo proposto in questa tesi si rivela essere ve-loce, semplice e soprattutto estremamente economico, per tracciare in prima approssimazione le curve di isteresi relative a frequenze che possono arrivare ad alcuni Megahertz [1].
1.1
Misura generale di isteresi
Il ciclo d’isteresi di un materiale risulta essere uno dei punti chiave da analiz-zare per un materiale ferromagnetico, particolarmente difficile da determinare a causa delle non-linearit`a e della dipendenza dalla precedente magnetizzazio-ne del nucleo, fattori che influiscono sulle sue caratteristiche. Queste curve risultano essere relativamente semplici da analizzare a frequenze minori di 15 KHz attraverso il “metodo classico”, esposto nella sezione 2.
Aumentando la frequenza per`o, aumenta anche la reattanza della ferrite sotto esame (ricordiamo che χ = ωL), richiedendo cos`ı alte tensioni in grado di generare le correnti atte a saturare il nucleo. Per ovviare a questo pro-blema la tecnologia attuale mette a disposizione generatori di alta tensione, necessari a saturare il nucleo alle frequenze richieste, generatori che, per`o,
CAPITOLO 1. INQUADRAMENTO GENERALE DEL PROGETTO 8 risultano essere particolarmente costosi.
Al momento attuale esistono differenti studi su sistemi alternativi, una soluzione al problema si pu`o ottenere con il sistema che verr`a proposto.
Sfruttando le caratteristiche di un circuito risonante LC `e possibile ali-mentare gli avvolgimenti di un nucleo in ferrite con una tensione
quasi-sinusoidale, riuscendo ad ottenere valori di tensione decisamente elevati
uni-tamente ad una frequenza che pu`o raggiungere il Megahertz o pi`u. Questo generatore risulta particolarmente adatto per tracciare la curva d’isteresi magnetica caratteristica del nucleo in esame. Il circuito risonante in analisi permette di ottenere un numero a piacere di picchi di tensione. Il loro nu-mero dipende dalla particolare programmazione del PIC. Generalmente, per una misura, sono sufficienti due o tre picchi consecutivi.
In questa maniera, tramite una sonda ad effetto Hall sul primario (op-pure, come vedremo, tramite un circuito per la misura di corrente) ed un voltmetro sul secondario, `e possibile rilevare i dati necessari alla determina-zione del ciclo di isteresi cio`e l’indudetermina-zione magnetica B ed il campo magnetico
H.
Sul metodo proposto verr`a effettuata un’analisi dapprima teorica, succes-sivamente verr`a descritto il metodo classico confrontando i risultati raggiunti attraverso quest’ultimo con i risultati ottenuti tramite il nostro metodo in bassa frequenza (5 ÷ 10 KHz). In fine verranno esposti i vari stadi di svi-luppo della scheda, descrivendone, di volta in volta, i problemi e le soluzioni adottate per superarli. Da qui si passer`a, ovviamente, alle conclusioni.
Metodi come questo permettono di caratterizzare sperimentalmente il materiale ferromagnetico in esame in maniera veloce, attraverso un numero relativamente basso di rilievi. I risultati cos`ı ottenuti possono essere utiliz-zati per la descrizione di fenomeni di isteresi in differenti condizioni, tramite modelli matematici che si basano sul metodo delle differenze finite nel do-minio del tempo, come il modello modificato di Preisach. Questo permette di determinare l’isteresi magnetica di un materiale ferromagnetico dolce, ba-sandosi su una procedura iterativa che tiene conto del major loop e della
curva di prima magnetizzazione del materiale stesso. La complessit`a della
relazione tra B ed H `e anche acresciuta dalla stretta dipendenza da numerosi parametri, come la temperatura, lo stress meccanico, la frequenza o pi`u in generale da come evolve il campo magnetico nei confronti del tempo. Avere a disposizione accurate misure `e una importante condizione per riuscire a simulare correttamente il fenomeno dell’isteresi magnetica.
CAPITOLO 1. INQUADRAMENTO GENERALE DEL PROGETTO 9
1.2
Isteresi magnetica
1.2.1
L’isteresi in generale
L’isteresi `e la caratteristica di un sistema di reagire in ritardo alle sollecita-zioni applicate in dipendenza dello stato precedente.
Il termine deriva dal greco hyst`eresis che significa ritardo e fu introdotto nel senso moderno da James Alfred Ewing nel 1890.
L’isteresi si ha nei materiali magnetici e ferromagnetici, nell’elasticit`a, ma `e anche usata per descrivere fenomeni biologici ed economici.
Se la risposta di un sistema con isteresi viene rappresentata in un grafico in funzione dello stimolo, si ottiene una caratteristica curva chiusa. In un sistema privo di isteresi la curva passa per l’origine e costituisce una linea singola. In presenza di isteresi si ottiene invece uno sdoppiamento della curva: se percorsa da sinistra a destra si ha un cammino, mentre quando percorsa in ritorno si ha l’altro cammino. I tratti orizzontali superiori ed inferiori rappresentano i limiti di saturazione. In figura 1.1 viene mostrata una tipica curva di isteresi di un materiale ferromagnetico.
Figura 1.1: Ciclo di isteresi di un materiale ferromagnetico
In un ciclo di isteresi di un materiale ferromagnetico si possono indivi-duare alcuni punti salienti:
CAPITOLO 1. INQUADRAMENTO GENERALE DEL PROGETTO 10 • Hc, campo coercitivo (Campo magnetico che `e necessario imporre in
modo da annullare l’induzione magnetica B, una volta magnetizzato il provino di ferrite)
• Bmax, valore di saturazione dell’induzione magnetica (valore massimo
di induzione magnetica raggiungibile)
• Br, induzione magnetica residua (valore di B ottenuto con H = 0 una
volta magetizzato il provino)
• Virgin curve, curva di prima magnetizzazione
1.2.2
Materiali ferromagnetici
Col nome di materiali ferromagnetici o ferriti, vengono chiamati tutti i cor-pi, puri o composti, che presentano una permeabilit`a magnetica relativa µr
molto elevata, con valori, ad esempio, compresi tra 1000 e 100000. I metalli puri ferromagnetici presenti in natura sono solamente quattro: ferro,
cobal-to, nichel e gadolinio. Esistono invece numerosissime leghe ferromagnetiche
che comprendono almeno uno degli elementi sopra citati uniti ad altri come alluminio, manganese e rame.
In ogni caso `e possibile affermare che in tutte le leghe ferromagnetiche esistono spiccate correnti molecolari naturali, in grado di portare un notevo-le contributo a qualsiasi campo magnetizzante che notevo-le orienti; si ottiene cos`ı all’interno del materiale un campo risultante la cui intensit`a pu`o diventare alcune migliaia di volte maggiore di quella del campo magnetizzante.
Le propriet`a magnetiche dei nuclei di ferrite sono determinati dalla fun-zione:
B = µ · H (1.1)
su di un materiale non ferromagnetico vale invece la relazione:
B = µ0· H (1.2)
dove µ0 ha un valore costante pari a 1.256 × 10−6 (henry/m). Per tutti i
materiali non magnetici, che hanno permeabilit`a relativa µr = 1 `e possibile
tracciare una retta che rappresenti l’andamento di B in funzione del campo magnetizzante H.
Eseguendo invece le stesse misure su di un nucleo di ferrite magnetica `e possibile rappresentare una curva a cui si d`a il nome di curva di
CAPITOLO 1. INQUADRAMENTO GENERALE DEL PROGETTO 11
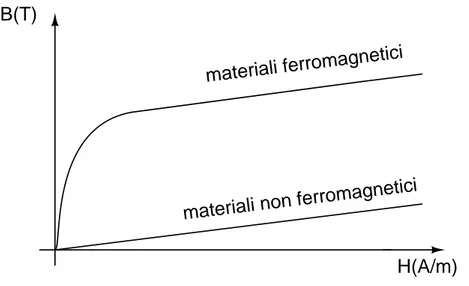
estremamente rapida al crescere di H, dopodich`e gli incrementi successivi di-ventano sempre meno sentiti e la curva assume infine un andamento lineare parallelo alla retta tracciata precedentemente, cio`e l’andamento di un mate-riale non ferromagnetico, come si vede in figura 1.2. L’andamento di queste
B(T)
H(A/m)
materiali ferromagnetici
materiali non ferromagnetici
Figura 1.2: Curve di magnetizzazione di materiali magnetici e non magnetici. curve rispecchia fedelmente il processo di orientamento che viene impresso dal campo magnetizzante alle correnti molecolari naturali; queste si sviluppano all’interno di magnetini elementari chiamati domini di Weiß che compongo-no questi materiali. Quando il campo ha raggiunto un’intensit`a sufficiente a rendere quasi completo l’orientamento delle molecole, l’induzione B non pu`o che crescere in maniera meno sentita: si dice allora che il materiale sta per raggiungere la saturazione. Infine quando il livello di saturazione `e com-pletamente ottenuto, ossia le correnti molecolari sono del tutto orientate, il loro contributo non pu`o pi`u subire alcun aumento, anche se il campo vie-ne illimitatamente aumentato: in queste condizioni l’induziovie-ne magvie-netica B aumenta semplicemente con la stessa intensit`a che si avrebbe nel vuoto.
Le differenze qualitative tra le curve di magnetizzazione di diversi tipi di materiali magnetici, dipendono da una diversa entit`a delle rispettive correnti molecolari e dall’intensit`a del campo magnetizzante che si richiede per pro-vocarne l’orientamento.
Di seguito scriveremo le equazioni teoriche usate per ricavare i valori di B ed H dalle misure di corrente e tensione. Conoscendo, infatti, gli andamenti di B ed H in funzione del tempo sar`a possibile ricavare il ciclo di isteresi.
CAPITOLO 1. INQUADRAMENTO GENERALE DEL PROGETTO 12
Supponendo di lavorare su un solenoide avvolto su di un materiale ferroso si ha, che secondo la legge di Faraday-Neumann, la relazione che intercorre tra la forza elettromotrice indotta, v(t), ai capi di una bobina e il flusso
magnetico concatenato, Φc(t), `e:
v(t) = −d Φc(t)
d t (1.3)
indicando con S la sezione del nucleo magnetico, con B(t) l’induzione ma-gnetica e supponendo che il secondario abbia N2 spire si pu`o esprimere il
flusso concatenato Φc come:
Φc(t) = N2 · S · B(t) (1.4)
da quest’ultima equazione possiamo porre in relazione B(t) con v2(t)
(ten-sione indotta sul secondario):
v2(t) = −N2· S ·
d B(t)
d t (1.5)
separando le variabili ed integrando otteniamo:
B(t) = − 1 N2· S
Z
v2dt (1.6)
In questa maniera misurando la tensione sul secondario della bobina `
e possibile determinare l’induzione magnetica B(t) in funzione del tempo.
Il campo magnetico H, generato dalla corrente i1 che scorre nella bobina,
pu`o essere ricavato invece dall’equazione 1.7, che deriva direttamente dalla legge di Amp`ere:
H = N1i1
` (1.7)
dove N1`e il numero di spire del primario mentre ` `e la lunghezza equivalente
del circuito magnetico (dato fornito dal costruttore della ferrite).Quindi mi-surando la corrente nel primario `e possibile determinare il campo magnetico H in funzione del tempo.
CAPITOLO 1. INQUADRAMENTO GENERALE DEL PROGETTO 13
1.2.3
Perch´
e caratterizzare una ferrite in alta
frequen-za
Una parte fondamentale dello studio sull’elettromagnetismo risiede nell’ana-lisi dei materiali magnetici ed il loro comportamento quando vengono sol-lecitati da un campo magnetizzante, in particolare l’attenzione si concentra sulle ferriti morbide. La principale caratteristica delle ferriti morbide, com-parandole con altri materiali, `e la propria alta resistivit`a che si ottiene con forme monolitiche.
Dal momento che le perdite dovute ai picchi di corrente sono inversamente
proporzionali alla resistivit`a e queste perdite aumentano con il quadrato del-la frequenza, un’alta resistivit`a diventa un fattore estremamente importante
nella scelta dei materiali magnetici, soprattutto in operazioni di medio-alta frequenza (cio`e per frequenze superiori a 500 KHz).
Le propriet`a magnetiche di una ferrite sono isotropiche, e sfruttando un complesso procedimento di sbriciolamento, iniezione e fusione `e possibile ot-tenere una vasta gamma di forme complesse. Negli ultimi anni le ferriti morbide hanno determinato lo standard grazie alle loro caratteristiche, come performance, costo ed efficienza volumetrica, in tutte le applicazioni che la-vorano da frequenze audio fino ad oltre i 500 MHz.
La caratterizzazione dei nuclei magnetici `e un obbiettivo indispensabile per garantire la corretta progettazione di schemi di elettronica di potenza e prevenire avarie nel sistema.
Di seguito mostreremo un esploso del provino di ferrite usato in questo lavoro (fig. 1.3): si tratta di un doppio nucleo di ferrite ad E del tipo N27, sul quale sono stati avvolti un primario ed un secondario aventi, per comodit`a, lo stesso numero di spire.
CAPITOLO 1. INQUADRAMENTO GENERALE DEL PROGETTO 14
Capitolo 2
Metodo classico
Il metodo classico consiste nell’eccitare il provino di ferrite con una corrente sinusoidale di ampiezza tale da saturare la ferrite stessa.
In letteratura si trovano esempi di caratterizzazione sperimentale del
ci-clo di isteresi ad alta temperatura ed alta frequenza per ferriti di potenza [5].
Questi sistemi sono comunque basati sull’utilizzo di generatori di tensione di potenza [10], apparati comunque molto costosi.
Il circuito da noi usato per fare le misure di confronto `e in pratica un am-plificatore tensione-corrente (transconduttivo) basato sull’integrato TDA7294.
Applicando, tramite un generatore di forme d’onda, una tensione sinu-soidale in ingresso al circuito, questo risponde imponendo una corrente (si-nusoidale ed alla stessa frequenza) nella bobina connessa alla sua uscita. In questo modo `e possibile saturare il nucleo di ferrite, solo per`o in bassa frequenza. Infatti al crescere della frequenza, e conseguentemente della reat-tanza (χ = ωL), questo amplificatore non `e pi`u in grado di saturare il nucleo di ferrite, oltretutto il TDA7294 `e un amplificatore audio [11], lavora cio`e fino ai 20 KHz circa. Comunque le misure fatte con questo circuito costituiranno la base per validare il nostro metodo.
Misurando quindi la tensione sul secondario e la corrente nel primario della ferrite `e possibile risalire al ciclo di isteresi.
La scheda in nostro possesso funziona fino una frequenza di circa 10 KHz, le misure da noi fatte sono state eseguite alla frequenza di 7 KHz.
Una descrizione dettagliata del metodo, con misure annesse, verr`a data nella sezione 4.1.
Capitolo 3
Sistema proposto
3.1
Primo stadio di sviluppo
In questa sezione descriveremo il sistema sviluppato nel primo studio fatto su questo metodo [1], [2]. Si tratta di un generatore concettualmente uguale a quello descritto in questa tesi. Con la differenza che in questo primo stadio di sviluppo `e presente un solo interruttore e quindi una sola eccitazione po-sitiva. Ci`o di fatto impediva, a causa delle perdite di energia, di raggiungere una buona saturazione negativa, generando in questo modo delle misure di isteresi parziali. La figura seguente (Fig. 3.1) evidenzia una dissimmetria tra i livelli di saturazione positivo e negativo raggiunti dalla corrente nel pri-mario della ferrite, dissimmetria che sar`a causa dei limiti gi`a esposti nella misura del ciclo di isteresi.
CAPITOLO 3. SISTEMA PROPOSTO 17
Figura 3.1: Andamento della corrente nel primario della ferrite; risul-ta evidente la dissimmetria tra i livelli di saturazione positivo e negativo raggiunti
CAPITOLO 3. SISTEMA PROPOSTO 18 In figura 3.2 si mostra il ciclo di isteresi in medio-bassa frequenza.
Figura 3.2: Ciclo di isteresi parziale in medio-bassa frequenza ottenuto al precedente stadio di sviluppo.
CAPITOLO 3. SISTEMA PROPOSTO 19 In figura 3.3 riportiamo lo schematico del circuito usato nel primo stadio di sviluppo. − + + − 30V Rc C1 1000uF 10pFC2 Cb 1pF Rb 1 Lb Misura di tensione Misura di corrente RURP IRPF IR2110 driver Rop1 Rop2 FPGA AD826 100kHz + -Circuito equivalente ferrite
Circuito di controllo del MOS
Figura 3.3: Circuito usato nel primo stadio di sviluppo.
Il circuito di eccitazione `e costituito da un generatore di impulsi quasi-sinusoidali, sviluppato in modo da sfruttare le capacit`a di risonanza tra un condensatore inserito (C2) e l’induttanza propria del nucleo magnetico (Lb).
La frequenza istantanea con cui la ferrite viene eccitata risulta perci`o essere proprio la frequenza di risonanza istantanea con cui oscilla il circuito LC. Il dimensionamento degli elementi deve essere fatto in modo da soddisfare le condizioni necessarie in un range di frequenza abbastanza ampio, approssi-mativamente tra i 5 KHz e valori superiori al Megahertz. Chiaramente la tensione continua in ingresso deve essere abbastanza elevata in modo da sa-turare il nucleo, e proprio il valore della tensione DC, insieme ad un’oculata scelta dei componenti reattivi permette di modificare i parametri del circuito per studiare l’isteresi magnetica in funzione della frequenza.
Gli elementi Cb, Rb e Lb rappresentano il circuito equivalente per gli
avvolgimenti del nucleo in esame. Possono essere ricavati testando il primario avvolto alla ferrite, con un impedenzimetro, lasciando il secondario aperto. L’analisi pu`o essere effettuata tramite diversi circuiti equivalenti, ma alla fine lo schema che meglio si adatta alle esigenze `e quello parallelo, che si pu`o vedere rappresentato in figura 3.3.
CAPITOLO 3. SISTEMA PROPOSTO 20 Il condensatore C1 scelto di valore 1000 µF viene caricato, quando il
tran-sistor risulta aperto, tramite una resistenza Rc, inserita in questo ramo del
circuito, di valore pari a 1 KΩ; la costante di tempo in gioco per questa prima parte di carica risulta τ0 = RcC1 = 1s mentre la tensione di alimentazione
viene posta a 30 V.
Nel momento in cui l’interruttore elettronico viene chiuso, il condensatore
C1 si scarica sulla bassa impedenza della bobina. Questi veloci transitori
sono caratterizzati da due costanti di tempo τ1 e τ2 dipendenti anche dalla
resistenza propria del transistore che chiameremo d’ora in poi Rmos. Le
suddette costanti di tempo risulteranno:
τ1 = Rmos(Cb+ C2)
e
τ2 = Lb/(Rb + Rmos)
Queste costanti per`o hanno un effetto trascurabile sulla risposta globale del sistema, infatti dopo questi intervalli il valore della corrente che fluisce at-traverso le spire segue una funzione esponenziale che dipende esclusivamente da Rb e Lb.
Il tasto elettronico viene quindi escluso dopo un intervallo di tempo mag-giore della costante di tempo τ0 e la corrente viene forzata a trovare un
cammino alternativo, visto che `e impossibilitata ad azzerarsi bruscamente. Si instaura cos`ı un’oscillazione con i condensatori posti in parallelo C2 e
Cb, creando cos`ı un campo magnetico che fluisce tra le spire con la stessa
frequenza della frequenza di risonanza della sezione LC del circuito. Cam-biando il valore della capacit`a C2possono essere ottenute differenti frequenze;
un valore approssimativo della fr pu`o essere ottenuto tramite la formula:
fr =
1
2πqLb(Cb+ C2)
(3.1) La caratteristica della bobina influisce con uno smorzamento minimo nel calcolo della frequenza e l’equazione usata per calcolare fr pu`o essere
tran-quillamente usata con un errore trascurabile. Prendendo in esame valori compatibili per gli elementi Cb, Rb e Lb e variando il condensatore C2 `e
CAPITOLO 3. SISTEMA PROPOSTO 21
3.2
Idea di principio del secondo stadio di
sviluppo
L’idea sviuppata in questa seconda versione del progetto `e quella di sdoppia-re il circuito in una parte positiva ed una parte negativa di aiuto.
Spiego meglio: il circuito precedente prevedeva solo un’eccitazione positi-va, accadeva che il sistema non raggiungeva una buona saturazione negatipositi-va, a causa della perdita di energia del sistema bobina-condensatore. Non rag-giungendo la suddetta saturazione negativa si otteneva un ciclo di isteresi
incompleto (figura 3.2).
Il sistema proposto (mostrato schematicamente in figura 3.4) prevede una parte di aiuto che spinge il sistema verso la saturazione negativa aiutandolo in un istante e per una durata oppurtuni. Infatti il condensatore di carica
C2 viene caricato dalla batteria E2 ad una tensione negativa, di valore tale
da imporre la saturazione della ferrite anche nella zona negativa. Quello che si cerca di ottenere, in questa maniera, `e la simmetrizzazione dell’andamento del campo H nel tempo, in modo da ottenere un ciclo di isteresi completo ed ugualmente saturato nella parte positiva come in quella negati-va.
CAPITOLO 3. SISTEMA PROPOSTO 22 E1 R1 C1 C ferrite C2 R2 E2
tensione sul secondario +
-parte positiva
parte di aiuto negativa
Ra0 Ra1
D1 D2
misura di corrente su primario
Rete di controllo dei MOS
CAPITOLO 3. SISTEMA PROPOSTO 23 Le equazioni che gestiscono la carica e la scarica del condensatore di oscil-lazione C sono del tutto simili a quelle del sistema precedente cos`ı come il calcolo della frequenza di oscillazione fr, data dall’equazione 3.1.
L’inizio dell’istante di aiuto e la sua durata dipendono dalla frequenza a cui si fa lavorare il sistema. Saranno questi due vincoli (istante e durata) che imporranno la scelta della parte di controllo: alle medio-basse frequenze (fino a circa 100 KHz) questo impulso di controllo pu`o essere generato agilmente dal nostro PIC 16F676. Per le frequenze target saranno necessari altri tipi di logiche: monostabili o batterie di registri sempre controllati dal PIC.
Vediamo con che logica vengono scelti l’istante di inizio e la durata dell’impulso di controllo dell’aiuto negativo (segnale Ra1).
L’istante di aiuto viene scelto lavorando sul grafico della corrente nel primario in funzione del tempo, grandezza che `e proporzionale al campo magnetico H. Verr`a individuato il primo istante di attraversamento dell’asse dei tempi da parte della corrente, questo `e l’istante in cui dovr`a iniziare l’impulso di controllo di aiuto.
Per quanto riguarda la durata, essa `e imposta essenzialmente da tre fattori:
1. la frequenza a cui si sta lavorando
2. il grado di saturazione negativa che si vuole raggiungere 3. la tensione di alimentazione negativa utilizzata
In figura 3.5 `e evidenziato l’istante scelto sul grafico di H in funzione del tempo.
Per avere pi`u cicli `e possibile porre un eventuale secondo aiuto positivo e negativo, il sistema infatti non pone limiti al numero di cicli completi ottenibili. Gli altri eventuali aiuti sono mostrati in figura 3.5.
CAPITOLO 3. SISTEMA PROPOSTO 24 0 50 100 150 200 250 300 350 400 450 500 −250 −200 −150 −100 −50 0 50 100 150 200 t (us) H (V/m)
Inizio aiuto negativo
Eventuale secondo aiuto positivo Eventuale secondo aiuto negatvo
Figura 3.5: Istante di inizio dell’impulso di controllo della parte di aiuto negativa.
Capitolo 4
Descrizione fisica dei circuiti
In questa sezione descriveremo fisicamente il circuito rispettando nella de-scrizione quello che in effetti `e stato l’effettivo sviluppo della scheda. In particolare verr`a posto l’accento sui problemi riscontrati nei vari stadi di svi-luppo del progetto e sulle soluzioni adottate per risolverli.
Divideremo questa sezione in quattro parti1:
1. Descrizione della scheda che implementa il metodo classico 2. Descrizione della scheda utilizzante i driver MOS (scheda 1)
3. Descrizione della scheda utilizzante i pulse transformer controllati in
corrente (scheda 2)
4. Descrizione della scheda utilizzante i pulse transformer controllati in
tensione (scheda 3)
1una simile struttura sar`a mantenuta nell’esposizione delle misure
CAPITOLO 4. DESCRIZIONE FISICA DEI CIRCUITI 26
4.1
Scheda ”metodo classico”
La progettazione di questa scheda `e precedente alla realizzazione di questo lavoro. Pur non avendo gli schematici dettagliati, `e stato comunque possibile ricavare uno schema di principio che illustri il suo funzionamento.
Detto circuito `e basato sull’integrato TDA7294 di SGS-Thomson Microe-lettronics, un amplificatore audio in grado di operare in un ampio range di valori di tensione (±40 V). L’uscita, progettata appositamente per pilotare bobine (nella fattispecie si tratterebbe di altoparlanti), ben si adatta a pi-lotare il primario del nostro provino di ferrite, essendo infatti in grado di gestire anche carichi da 6 Ω.
Tramite il TDA7294 viene realizzato un amplificatore transconduttivo (o
convertitore tensione-corrente), a tale ampilificatore viene posto in ingresso
una sinusoide a 7 KHz prodotta da un normale generatore di segnali da labo-ratorio. In uscita troviamo una sinusoide in corrente, alla stessa frequenza, in grado di pilotare il primario del provino di ferrite.
In questo modo misurando la corrente nel primario e la tensione sul
secondario siamo in grado di determinare il ciclo di isteresi alla frequenza
di 7 KHz. Questo risultato verr`a messo a confronto, via via, con i diversi ”cicli di isteresi” a bassa frequenza ricavati con le varie schede implementanti il metodo studiato in questa tesi, in modo da verificare la bont`a del metodo alle basse frequenze (5 ÷ 10 KHz).
Uno schema di principio di questa scheda `e mostrato in figura 4.1.
Generatore di forme d’onda
Provino di ferrite Misura di tensione sul secondario + -Misura di corrente sul primario + tensione -sinusoidale a 7kHz corrente sinusoidale a 7kHz
basato sul TDA7294 Convertitore tensione-corrente
Figura 4.1: Schema di principio del metodo classico
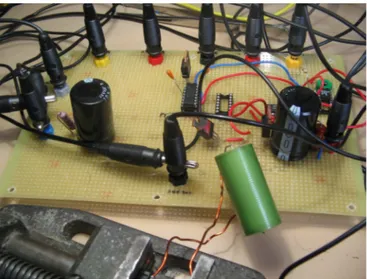
In figura 4.2 abbiamo una fotografia della scheda utilizzata, mentre in figura 4.3 `e rappresentato il provino di ferrite stretto nella morsa. Questo sar`a ovviamente lo stesso in tutte le misure fatte con le varie schede.
CAPITOLO 4. DESCRIZIONE FISICA DEI CIRCUITI 27
Figura 4.2: Fotografia della scheda che implementa il metodo classico
CAPITOLO 4. DESCRIZIONE FISICA DEI CIRCUITI 28
4.2
Scheda 1
Questo circuito `e stato sviluppato su una scheda per montaggi sperimentali con saldature in stagno nella parte inferiore della scheda stessa. Le saldature sono state fatte a mano con un comune saldatore da laboratorio.
Nelle figure 4.4 e 4.5 sono rappresentate rispettivamente lo schematico ed una fotografia del circuito usato.
driver MOS − + − + 2,5 V PIC 16F676 regolatore 17805CV 5V 5V regolati Ra0 Ra1 IR 2110 E1 R1 C1 C ferrite C2 R2 E2
tensione sul secondario +
-sonda di corrente ad effetto Hall AD 826AN
parte positiva parte di aiuto negativa
M1 M2
CAPITOLO 4. DESCRIZIONE FISICA DEI CIRCUITI 29
CAPITOLO 4. DESCRIZIONE FISICA DEI CIRCUITI 30
4.2.1
Componenti utilizzati e funzionamento
Nello schematico possiamo distinguere una parte di controllo e una parte di potenza.
La parte di controllo `e costituita da regolatore, PIC, comparatore e
driver. Vediamoli nel dettaglio:
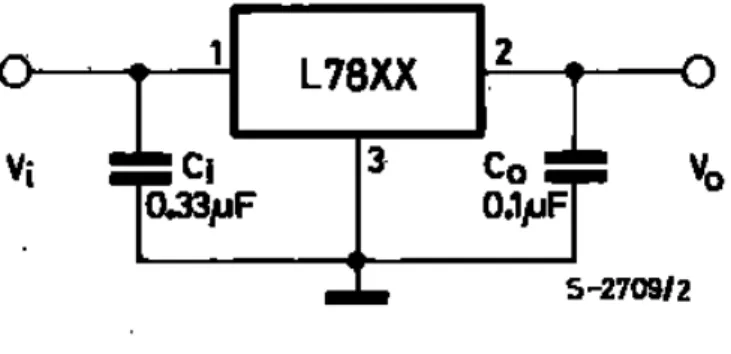
• Regolatore: si tratta del regolatore ”L7805CV” della famiglia ”L78XX”
di ST [13]. Questo regolatore `e in grado di generare in uscita la ten-sione a 5 V regolata necessaria per il corretto funzionamento del PIC. Il regolatore `e stato montato sulla scheda secondo le specifiche date dal costruttore nei data-sheet, cio`e con un condensatore in ingresso da 0.33 µF ed uno in uscita da 0.1 µF, come si vede in figura 4.6.
Figura 4.6: Regolatore di tensione con i due condensatori di ingresso e uscita
• PIC: si tratta del microcontrollore PIC 16F676 [14] di Microchip.
Il programma di controllo viene caricato sulla program memory FLASH 1K × 14 attraverso il programmatore PICkit1 FLASH STARTER KIT di Microchip (mostrato in figura 4.7). Lo stesso programma viene scritto direttamente in assembler attraverso l’ambiente di sviluppo ”MPLAB IDE” di Microchip e assemblato con l’assemblatore dato in dotazione con ”PICkit1 FLASH STARTER KIT”. Successivamente viene caricato nel PIC via USB.
CAPITOLO 4. DESCRIZIONE FISICA DEI CIRCUITI 31
Figura 4.7: Scheda di programmazione del PIC, ”PICkit1 FLASH STARTER KIT”
CAPITOLO 4. DESCRIZIONE FISICA DEI CIRCUITI 32
• Comparatore: `e stato implementato utilizzando l’integrato AD826
di Analog Devices [15]. Questo chip contiene due amplificatori opera-zionali. Applicando sugli ingressi invertenti una tensione costante di 2.5 V e utilizzando una configurazione ad anello aperto, si ottengono due comparatori. Le caratteristiche di velocit`a dell’AD826 sono pi`u che sufficienti per le nostre esigenze, lavorando il nostro circuito ad una frequenza inferiore al Megahertz. Infatti [15]:
– Unity Gain Bandwidth typ. = 35 MHz – Settling Time = 70 ns
• Driver MOS: si tratta del driver IR2110 [16] di International Rectifier.
`
E un integrato avente due ingressi e due uscite adatte a pilotare due MOS distinti, contemporaneamente. Il driver `e stato utilizzato in ma-niera anomala, non essendo i nostri due MOS riferiti n`e a massa, n`e alla tensione di alimentazione, ma bens`ı flottanti. La configurazione ti-pica infatti richiederebbe che i due MOS fossero riferiti ad una tensione fissa. Questo `e stato causa di problemi come si vedr`a pi`u avanti. Di seguito descriveremo il funzionamento della parte di controllo: il PIC, opportunamente programmato, genera i due impulsi di controllo (Ra0 ed
Ra1). Ra0 controlla l’apertura e la chiusura del MOS della parte positiva,
mentre Ra1 controlla il MOS della parte di aiuto negativa.
I segnali generati dal PIC variano su due livelli: 0 ÷ 5 V. Per pilotare il
driver sono invece necessari segnali che varino nel range 0 ÷ 15 V, per questo
motivo `e stato messo il comparatore, che opera da rigeneratore dei livelli. Quest’ultimo ha una soglia a 2.5 V posta sull’ingresso invertente dell’ope-razionale. Inviando quindi le uscite del PIC agli ingressi non invertenti, si ha che se Ra0 = 0 < 2.5 V l’uscita del comparatore sar`a bassa (0), mentre
se Ra0 = 5 V > 2.5 V l’uscita del comparatore sar`a alta (15V ). Analogo
discorso vale, ovviamente, per Ra1.
In questo modo viene controllato il driver che `e in grado di generare i giusti segnali di pilotaggio per i MOS.
La parte di potenza `e costituita dai seguenti elementi:
• E1 ed E2: batterie di carica positiva e negativa rispettivamente. La
tensione usata dipende dal singolo esperimento in base al livello di saturazione che si ha intenzione di raggiungere ed ai tempi di apertura e chiusura dei MOS.
CAPITOLO 4. DESCRIZIONE FISICA DEI CIRCUITI 33
• C1 ed C2: condensatori elettrolitici da 1000 µF e tensione di rottura di
100 V pi`u che sufficiente per i nostri scopi.
• MOS: sono due MOS di media potenza IRF1310N di International
Rec-tifier [17]. Questo componente ha caratteristiche di potenza e velocit`a adatte ai nostri scopi. Infatti una VDSS = 100 V ed una ID = 42 A
garantiscono un’adeguata robustezza. Mentre tempi come [td(on)+ tr] = 67 ns
ed
[td(of f )+ tf] = 85 ns
permettono di gestire gli impulsi con i quali abbiamo a che fare che hanno una ampiezza minima di 1 µs, essendo la massima frequenza di lavoro pari a 1 MHz.
• C: il condensatore di oscillazione. Il suo valore varia in base alla
fre-quenza di oscillazione che si vuole ottenere. La scelta `e caduta su con-densatori in poliestere, un tipo di condensatore che minimizza le perdite ed ha un buon funzionamento in un vasto range di frequenze. Mini-mizzare le perdite `e un aspetto importante per limitare l’attenuazione di energia durante le oscillazioni libere.
• Ferrite: si tratta della ferrite soffice N27 avente le seguenti
caratteri-stiche:
– Induzione di saturazione: 500 mT
– Campo magnetico di saturazione: 1200A m – Permeabilit`a iniziale: 2000 ± 25% – Temperatura di Curie: > 220oC – Resistivit`a: 3 Ω m – Lunghezza equivalente: 46.3 mm – Sezione equivalente: 32.1 mm2 – Fattore di induzione: 1300 nH spire2
Questo provino di ferrite `e costituito da un nucleo primario ed uno secondario, avente ciascuno 5 spire. Avendo, infatti, un rapporto spire unitario, i calcoli per determinare B ed H sono un poco pi`u semplici.
CAPITOLO 4. DESCRIZIONE FISICA DEI CIRCUITI 34 Per chiarezza descriveremo il funzionamento della parte di potenza per punti:
1. M1 ed M2 aperti: le due sezioni di carica si caricano con una costante
di tempo di circa τ = R1C1 = R2C2 = 1 s.
2. M1 chiuso ed M2 aperto: la carica immagazzinata nel condensatore
C1 si trasferisce al sistema ferrite-C.
3. M1 aperto ed M2 aperto: non essendoci pi`u vie di fuga per la
cor-rente, si innesca l’oscillazione smorzata tra ferrite ed il condensatore
C.
4. M1 aperto ed M2 chiuso: questo `e il momento dell’aiuto negativo.
`
E infatti in questo intervallo di tempo che il condensatore C2 aiuta,
con la sua carica negativa, il picco negativo della corrente nella ferrite e quindi del campo H, permettendo una buona saturazione negativa.
CAPITOLO 4. DESCRIZIONE FISICA DEI CIRCUITI 35
4.2.2
Problemi riscontrati
Il principale problema di questo primo prototipo era dato dalla fragilit`a del
driver MOS. Infatti questi driver sono progettati per pilotare MOS aventi
un qualche riferimento ad una tensione costante, sia massa o alimentazione positiva, come si vede in figura 4.8.
Figura 4.8: Connessione tipica del driver ”IR2110”
I nostri MOS, invece, sono flottanti. Questo durante le commutazioni creava delle sovratensioni su alcuni piedini del driver bruciandolo: in parti-colare non risultava controllabile la relazione di tensione tra VB e VS. Infatti,
sul data-sheet del driver [16], si riporta, come fondamentale, il rispetto della seguente relazione
VB ∈ [(VS+ 10); (VS+ 20)]
Nella dinamica di funzionamento questa relazione non veniva rispettata, provocando la rottura del driver.
Ci`o nonostante, utilizzando la scheda appena descritta, siamo stati in grado di fare alcune misure che si sono comunque rivelate utili ed hanno confortato sulla bont`a teorica del metodo proposto.
CAPITOLO 4. DESCRIZIONE FISICA DEI CIRCUITI 36
4.3
Scheda 2
In questa versione si `e cercato di porre rimedio al problema della fragilit`a dei driver sostituendoli con dei trasformatori di impulso (pulse-transformer ) in grado di trasferire impulsi dal primario al secondario fino alla frequenza di 1 MHz. In figura 4.9 riportiamo lo schematico di scheda2.
− + 2,5 V PIC 16F676 regolatore 17805CV 5V 5V regolati Ra0 Ra1 E1 R1 C1 C ferrite C2 R2 E2
tensione sul secondario +
-AD 826AN
parte positiva parte di aiuto negativa
− + − + 15V 15V misura di corrente Q1 Q2 D1 D2 D3 D4 D5 D6 Rp1 Rp2 Ra Rb Rc AD826 M1 M2 Pulse transformer
parte positiva parte negativa
Pulse transformer
CAPITOLO 4. DESCRIZIONE FISICA DEI CIRCUITI 37 La parte di potenza `e uguale a quella di scheda1, ci`o che cambia `e la
parte di controllo con l’inserimento dei pulse-transformer e della circuiteria
adatta al loro pilotaggio.
4.3.1
Componenti utilizzati e funzionamento
Il gruppo regolatore-PIC-comparatore rimane uguale alla precedente scheda. Elenchiamo di seguito i componenti che sono cambiati.
1. Pulse-transformer: si tratta del modello 1001 di C&D Technologies [18]. `E un trasformatore di impulso con un rapporto spire di 1:1 adatto per il trasferimento di impulsi fino alla frequenza di 1 MHz.
2. Diodi D3 e D4: sono i diodi di flyback (o di circolazione) dei
pulse-transformers. Servono per scaricare le sovratensioni negative che ven-gono a crearsi, a causa dell’inerzialit`a alle variazioni di corrente dei trasformatori, quando i BJT interrompono bruscamente la corrente nel primario.
3. BJT Q1 e Q2: sono due BJT di media potenza TIP41 di Faichild
Semiconductor [19]. Il loro compito `e quello di controllare il fluire della corrente nel primario dei pulse-transformers. Il prodotto guadagno-banda (PGB) `e fT = 3 MHz, pi`u che sufficiente per trasmettere i nostri
impulsi.
4. Diodi Shottky: tra base e collettore dei BJT sono stati posti questi due diodi in modo da evitare la saturazione della base. Fenomeno che farebbe perdere, nella fase di spegnimento del BJT, un tempo di circa 4 ÷ 5 µs inaccettabile per le nostre specifiche.
5. Potenziometri RP 1 ed RP 2: sono stati messi per modulare l’intensit`a
di corrente nella base dei BJT. Operano nel range di resistenza [0 ÷ 10 KΩ].
A causa della rottura della sonda ad effetto Hall, che permetteva di mi-surare la corrente in maniera precisa e non invasiva, si `e dovuto utilizzare un
circuito per la misura della corrente nel primario della ferrite.
In figura 4.10 viene mostrato il circuito per il prelievo e la misura della corrente.
Vediamone il funzionamento: la resistenza Ra = 0.4 Ω ha il compito di
prelevare la tensione V+ proporzionale alla corrente proveniente dal primario
CAPITOLO 4. DESCRIZIONE FISICA DEI CIRCUITI 38 − + misura di corrente Ra Rb Rc AD826
Corrente proveniente dal primario della ferrite
V+ V-Vu
Figura 4.10: Schematico del circuito per la misura della corrente nel primario della ferrite
V+= Raif err
dove if err `e la corrente che scorre nel primario della ferrite. L’ordine di
grandezza di if err, in dipendenza dalle misure effettuate, `e tra 1 A e 2 A. In
questo modo si ottiene V+ ∈ [0.4 V ÷ 0.8 V] che `e un range di tensioni ben
gestibile dall’AD826 [15].
In fine, scegliendo Rc= 10 KΩ ed Rb = 1 KΩ, si ha che:
Vu = µ 1 + Rc Rb ¶ V+ ∈ [4, 4 V ÷ 8, 8 V]
in questo modo misurando Vu abbiamo una misura di della corrente che
scorre nel primario della ferrite:
if err =
V+
Ra
Possiamo adesso vedere il funzionamento della nuova parte di control-lo. La trasmissione degli impulsi di controllo (provenienti dal sistema PIC-comparatore) ai MOS avviene, come detto, tramite i due trasformatori di
pulso. In questa versione della scheda, il controllo dei trasformatori
avvie-ne in corrente, avvie-nella seguente maniera: quando sulla base del BJT arriva l’impulso positivo questi comincia a condurre, entrando successivamente in una zona di quasi-saturazione, zona di funzionamento nella quale la tensio-ne collettore-emettitore (VCE) `e pari al massimo ad 1.5 V, come si legge sui
data-sheet del TIP41 [19]. In questo modo il trasformatore trasmette un im-pulso di (15 − 1.5) V = 13.5 V sulla VGS dei MOS, permettendo la chiusura
CAPITOLO 4. DESCRIZIONE FISICA DEI CIRCUITI 39
4.3.2
Problemi riscontrati
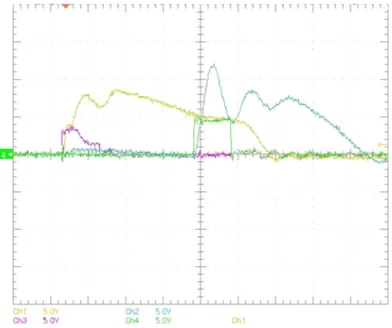
Le problematiche poste da questo circuito sono, effettivamente, quelle che hanno impedito di innalzare la frequenza di lavoro. Il problema principale riguarda la trasmissione degli impulsi tra PIC e MOS. In particolare si nota un evidente allungamento degli impulsi ed una deteriorazione dei fronti di salita e di discesa. In figura 4.11 mostriamo un’immagine di una schermata dell’oscilloscopio con riportati gli impulsi del PIC ed i corrispondenti impulsi in uscita dal pulse-transformer.
Figura 4.11: Schermata di confronto tra gli impulsi in uscita dal PIC ed in ingresso ai MOS
Mentre nelle figure 4.12 ed 4.13 riportiamo una schematizzazione delle distorsioni apportate agli impulsi dal sistema BJT-trasformatore, rispettiva-mente per la parte negativa e positiva.
Tali distorsioni sono limitanti per quanto riguarda la massima frequenza
raggiungibile dal sistema. Infatti, con questi impulsi, la minima distanza
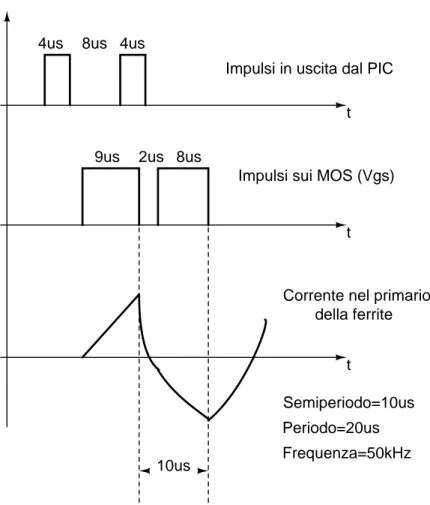
ottenibile tra la fine dell’impulso positivo e quella dell’impulso negativo `e di circa 10 µs (come si vede in figura 4.14). Il periodo dell’onda di corrente sar`a di circa 20 µs, corrispondenti ad una frequenza di 50 KHz. Questa `e appunto la massima frequenza raggiungibile con questa scheda.
CAPITOLO 4. DESCRIZIONE FISICA DEI CIRCUITI 40
1.04 uS 2.08uS 9.36uS 2.48uS 12 uS
t
t
Impulso in uscita dal PIC
Impulso in arrivo al MOS (Vgs)
Figura 4.12: Rappresentazione schematica di confronto tra gli impulsi in uscita dal PIC ed in ingresso al MOS della parte negativa
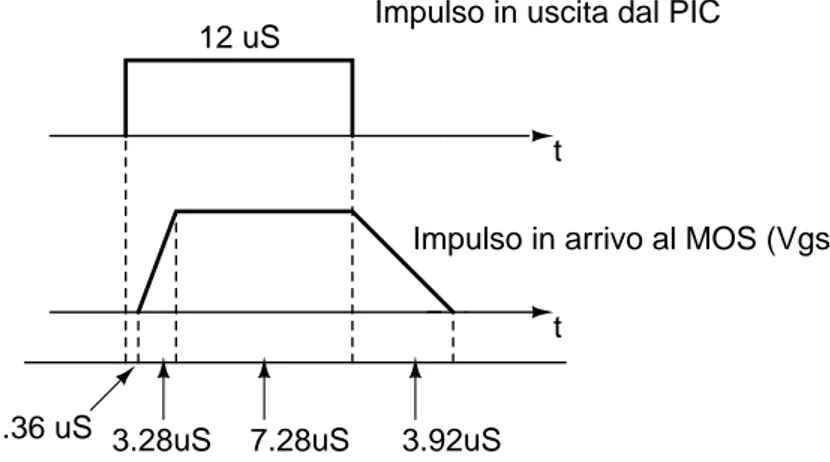
1.36 uS 3.28uS 7.28uS 3.92uS 12 uS
t
t
Impulso in uscita dal PIC
Impulso in arrivo al MOS (Vgs)
Figura 4.13: Rappresentazione schematica di confronto tra gli impulsi in uscita dal PIC ed in ingresso al MOS della parte positiva
CAPITOLO 4. DESCRIZIONE FISICA DEI CIRCUITI 41
4us 8us 4us
9us 2us 8us
10us
t
t
t Impulsi in uscita dal PIC
Impulsi sui MOS (Vgs)
Corrente nel primario della ferrite
Semiperiodo=10us Periodo=20us Frequenza=50kHz
Figura 4.14: Rappresentazione schematica degli impulsi in uscita dal PIC, di quelli che arrivano ai MOS (VGS) e della corrente nel primario della ferrite
CAPITOLO 4. DESCRIZIONE FISICA DEI CIRCUITI 42 Comunque la generazione degli impulsi per fare le misure sotto i 50 KHz `e buona come si vede nelle seguenti figure (4.15 ed 4.16):
Figura 4.15: Impulsi in uscita dal PIC ed in ingresso al MOS, per la parte
positiva
Figura 4.16: Impulsi in uscita dal PIC ed in ingresso al MOS, per la parte
CAPITOLO 4. DESCRIZIONE FISICA DEI CIRCUITI 43
4.3.3
Commenti
Ad una prima analisi, il problema sembrava risiedere nella saturazione dei
BJT, per questo motivo sono stati posti i diodi Shottky, i quali non hanno
per`o sortito l’effetto sperato. Perci`o si `e dedotto che la causa della distorsione degli impulsi dovesse essere una questione di carattere fisico riguardante l’i-nerzialit`a alle variazioni di corrente tipiche delle induttanze, nel caso specifico si tratterebbe dei trasformatori di pulso.
Di fatto `e per questo motivo che `e stata fatta la scelta di cambiare il ti-po di pilotaggio dei pulse transformer, nella speranza di ridurre i sopracitati effetti di inerzialit`a alla corrente.
In ogni caso restano dubbi sul fatto che i BJT possano andare lo stesso in saturazione nonostante i diodi Shottky posti tra base e collettore. Sareb-be stato di conforto trovare dei BJT-Shottky di adeguate caratteristiche, in modo da avere la sicurezza della non-saturazione profonda dei bipolari. Cosa che non `e stata possibile.
CAPITOLO 4. DESCRIZIONE FISICA DEI CIRCUITI 44
4.4
Scheda 3
Questa terza versione della scheda `e in gran parte simile alla ”scheda2”. La variazione consiste in un diverso controllo dei pulse transformer nel tentativo di eliminare le distorsioni che si avevano sugli impulsi di controllo.
Di fatto `e stata tolta la parte con i BJT, implementando un controllo in
tensione dei pulse transformer stessi.
In seguito, figura 4.17, si riporta lo schematico di quest’ultima versione della scheda. − + 2,5 V PIC 16F676 regolatore 17805CV 5V 5V regolati Ra0 Ra1 E1 R1 C1 C ferrite C2 R2 E2
tensione sul secondario +
-parte positiva parte di aiuto negativa
− + − + misura di corrente 15V Ra Rb Rc T1 T2 AD826 D1 D2 D3 D4 M1 M2 AD826 iferr
Figura 4.17: Schematico della terza versione della scheda
Come si vede dallo schema gli AD826, alimentati a 15 V, controllano direttamente i pulse transformer.
CAPITOLO 4. DESCRIZIONE FISICA DEI CIRCUITI 45 oltre che una semplificazione del circuito stesso. Infatti le misure a pi`u alta frequenza sono state fatte proprio con questa ultima versione della scheda.
Capitolo 5
Validazione del sistema
In questo capitolo esporremo le misure fatte con i vari prototipi di scheda realizzati, partendo da quelle eseguite attraverso il metodo classico in bassa frequenza. Queste verranno poi confrontate, nella sezione 5.5 con le misure ricavate con le nostre schede in modo da validare il metodo esposto in questa tesi.
Tre importanti fattori influenzano il ciclo di isteresi di un ferromagnete: 1. La frequenza dell’eccitazione che genera il campo.
2. La temperatura del ferromagnete stesso.
3. Gli stress meccanici, cio`e le compressioni o gli stiramenti a cui `e sottoposto il materiale sotto esame.
A noi interessa, in particolare, il variare della forma della forma del ciclo di isteresi con la frequenza, mantenendo costanti gli altri due parametri. Co-me possiamo garantire la costanza di temperatura e stress Co-meccanico?
Per quanto riguarda il “problema temperatura”, il nostro metodo si ri-vela ideale. Lavorando su pochi cicli, infatti, la ferrite praticamente non si scalda. Utilizzando il metodo classico, invece, si fa in modo di prendere solo i primi due o tre cicli, spegnendo velocemente il generatore. Tentando, sol-lecitandola il meno possibile, di non innalzare la temperatura della ferrite. Comunque, la buona coincidenza tra l’isteresi rilevata col metodo classico e quella rilevata col nostro metodo rivela che questo aspetto `e stato ben gestito. Lo stress meccanico viene controllato stringendo la ferrite in una morsa, sempre con lo stesso serraggio. Il fatto che il provino di ferrite sia stressato
CAPITOLO 5. VALIDAZIONE DEL SISTEMA 47 anche meccanicamente `e intuibile anche dal caratteristico ”clic” intermitten-te udibile duranintermitten-te la misura. Il serraggio nella morsa dovrebbe comunque garantire un’uniformit`a di questo effetto nelle misure.
Le misure di corrente, per la determinazione del campo H, sono state fatte in principio con una sonda ad effetto Hall (mostrata in figura 5.1).
Figura 5.1: Rappresentazione della sonda ad effetto Hall
Si tratta della sonda di corrente con accoppiamento DC A6312 interfac-ciata con un amplificatore AM503A entrambi di Tektronix. Questo sistema di misura si rivela diretto ed efficace avendo una banda passante compresa tra la continua ed i 100 MHz oltre ad avere un sistema di controllo dell’offset estremamente utile nella fase di acquisizione dati.
Purtroppo non `e stato possibile utilizzare questa sonda per tutta la dura-ta delle misure a causa della rottura dell’amplificatore. Al suo posto `e sdura-tato adoperato il sistema gi`a descritto nella sezione 4.3.1 e mostrato in figura 4.10. Tale sistema si rivela comunque affidabile e preciso nel range di frequenze di lavoro.
Le misure di tensione vengono fatte con l’oscilloscopio TDS5104 di Tektronix (figura 5.2). Si tratta di un oscilloscoipio a 4 canali, 1 GHz ed una capacit`a di 5 G samplesec [20].
L’elevata qualit`a di questa macchina permette di fare misure estrema-mente precise fin dai primi istanti dell’attivazione dei MOS.
Questo oscilloscopio `e stato di particolare utilit`a, infatti si tratta di una macchina funzionante su base PC. Questo le permette, oltre che di prelevare le forme d’onda, di elaborarle. In particolare `e possibile eseguire operazio-ni matematiche (integrazione, derivazione ecc.) in tempo reale sui segnali prelevati. Inoltre il TDS5104 permette di esportare le forme d’onda cattura-te, direttamente in formato .dat, che `e il formato nativo di Matlab. Infatti
CAPITOLO 5. VALIDAZIONE DEL SISTEMA 48
Figura 5.2: Oscilloscopio usato nelle misure
proprio con Matlab sono state eseguite le ultime elaborazioni sui segnali di nostro interesse.
Tutte le misure vengono fatte nel seguente modo:
1. Viene catturata l’onda di corrente nel primario con l’oscilloscopio ed esportato il file .dat corrispondente
2. Utilizzando Matlab si implementa l’equazione 1.7 riportata di seguito per comodit`a:
H = N1i1 `
per determinare l’andamento del campo H. Dove ` `e la lunghezza equivalente del provino di ferrite e vale 46.3 mm, mentre N1`e il numero
di spire del primario ed `e pari a 5
3. Con l’oscilloscopio si cattura l’onda di tensione sul secondario della ferrite
4. L’onda di tensione viene integrata direttamente sull’oscilloscopio ed esportata in formato .dat
CAPITOLO 5. VALIDAZIONE DEL SISTEMA 49 5. Utilizzando Matlab si implementa l’equazione 1.6 riportata di seguito
per comodit`a:
B(t) = − 1 N2· S
Z
v2dt
per determinare l’andamento dell’induzione magnetica B(t)
N2 `e il numero di spire del secondario mentre S `e la sezione equivalente
pari a 32.1 mm2
6. Il valore di B viene rappresentato in funzione di H sul piano (H-B), sempre con Matlab, ottenendo cos`ı il ciclo di isteresi
CAPITOLO 5. VALIDAZIONE DEL SISTEMA 50
5.1
Metodo classico
Le seguenti misure sono state fatte ad una frequenza di 7 KHz. Utilizzando la scheda descritta nella sezione 4.1.
5.1.1
Misure
Di seguito riportiamo gli andamenti del campo H, della induzione B e il ciclo di isteresi rispettivamente nelle figure 5.3, 5.4 e 5.5.
0 50 100 150 200 250 300 350 400 −100 −80 −60 −40 −20 0 20 40 60 80 100 t(us) H (A/m)
Figura 5.3: Andamento del campo H nella misura fatta con il metodo classico
CAPITOLO 5. VALIDAZIONE DEL SISTEMA 51 0 50 100 150 200 250 300 350 400 −0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.5 t (us) B (T)
Figura 5.4: Andamento del induzione B nella misura fatta con il metodo classico −100 −80 −60 −40 −20 0 20 40 60 80 100 −0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.5 H (V/m) B (T)
CAPITOLO 5. VALIDAZIONE DEL SISTEMA 52
5.1.2
Commenti
Il generatore, implementato dalla scheda classica, lavora in regime sinusoidale con in ingresso una sinusoide creata da un generatore di forme d’onda da laboratorio.
Si `e cercato di sollecitare termicamente il meno possibile la ferrite, cercan-do appunto di spegnere il generatore cercan-dopo un piccolo numero di cicli. Infatti, sottoponendo il provino di ferrite per un tempo troppo lungo all’azione del generatore si `e notato un evidente riscaldamento, che avrebbe potuto inficiare la validit`a di queste misure.
CAPITOLO 5. VALIDAZIONE DEL SISTEMA 53
5.2
Scheda 1
5.2.1
Misure a 7 KHz
Con questa scheda sono state eseguite solo le misure a 7 KHz, a causa della fragilit`a dei driver, di cui gi`a abbiamo discusso. Per riuscire a fare queste misure sono state prese le seguenti precauzioni nell’uso dei driver: tra Vb e
Vsvengono imposti 15 V per mezzo di un generatore di tensione. Come terra
del circuito si prende il punto a tensione pi`u negativa: −E2. Il pin COM
del driver viene collegato a massa. Cos`ı i driver non bruciano, almeno per qualche prova.
Vengono catturate dapprima corrente e tensione e da qui ricavati, tramite Matlab, il campo H e l’induzione B, rappresentati nelle figure 5.6 ed 5.7. Da queste due grandezze si ottiene il ciclo di isteresi mostrato in figura 5.8.
0 50 100 150 200 250 300 350 400 −150 −100 −50 0 50 100 150 t (us) H (A/m)
Figura 5.6: Campo magnetico H ricavato con la scheda1 alla frequenza di 7 KHz
CAPITOLO 5. VALIDAZIONE DEL SISTEMA 54 0 50 100 150 200 250 300 350 400 −0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.5 t (us) B (T)
Figura 5.7: Induzione magnetica B ricavata con la scheda1 alla frequenza di 7 KHz −150 −100 −50 0 50 100 150 −0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.5 H (A/m) B (T)
CAPITOLO 5. VALIDAZIONE DEL SISTEMA 55 Per effettuare queste misure `e stato usato un condensatore di oscillazione
C di valore pari ad 10 µF, infatti conoscendo il fattore di induzione (FI) ed
il numero di spire (Nspire) `e possibile ricavare l’induttanza (L) del provino di
ferrite:
L = FI · (Nspire)2
= 1300 × 10−9· (5)2
= 32.5 µH
Dove FI = 1300 nH
spire2 `e il fattore di induzione. Il numero di spire, Nspire,
`e pari a 5.
A questo punto possiamo calcolare un valore approssimato della frequenza di oscillazione fr utilizzando la seguente equazione:
fr = 1 2π√L · C = √ 1 32.5 × 10−6· 10 × 10−6 ∼ = 8.8 KHz
si tratta di un valore di frequenza praticamente coincidente con quello misurato.
CAPITOLO 5. VALIDAZIONE DEL SISTEMA 56 Per poter confrontare questo ciclo con quello ricavato col metodo classico `e necessario “tagliare” i campi H e B prima che inizino ad attenuarsi. In questo modo si evita il “collassamento” del grafico del ciclo di isteresi verso l’origine.
Di seguito nelle figure 5.9 ed 5.10 si riportano i campi “tagliati” ed in figura 5.11 il corrispondente ciclo di isteresi.
Figura 5.9: Campo magnetico H “tagliato” ricavato con la scheda1 alla frequenza di 7 KHz
CAPITOLO 5. VALIDAZIONE DEL SISTEMA 57 0 20 40 60 80 100 120 140 −0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4 0.5 t (us) B (T)
Figura 5.10: Induzione magnetica B “tagliata” ricavata con la scheda1 alla frequenza di 7 KHz −0.03−8 −0.02 −0.01 0 0.01 0.02 0.03 −6 −4 −2 0 2 4 6 8x 10 −5 H B
Figura 5.11: Ciclo di isteresi “tagliato” ricavato con la scheda1 alla frequenza di 7 KHz
CAPITOLO 5. VALIDAZIONE DEL SISTEMA 58 Il programma caricato nel PIC, il cui listato `e mostrato nella sezione A.1 dell’appendice, esegue i seguenti compiti:
1. Aspetta 1 secondo, eseguendo la procedura delay1sec 2. Setta RA1 (impulso di controllo parte positiva) per 12 µs
3. Resettato RA1, aspetta 60 µs
4. Setta RA2 (impulso di controllo parte di aiuto negativa) per 11 µs
5. Torna all’inizio del programma e ricomincia
In figura 5.12 si pu`o vedere una rappresentazione degli impulsi generati dal programma caricato nel PIC.
RA0
RA1
t (us)
12
60
11
1sec
Figura 5.12: Impulsi RA0 ed RA1 generati dal PIC per le misure a 7 KHz
La tensioni della batterie della sezione di carica E1 ed E2 sono
rispetti-vamente 4.5 V e −3.4 V. Valori che permettono una saturazione simmetrica. Ricordiamo infatti che la profondit`a di saturazione dipende da due fattori:
• L’ampiezza temporale dell’impulso, cio`e la durata della carica delle
sezioni di carica
• Il valore delle batterie di carica, proporzionale alla pendenza delle curve
CAPITOLO 5. VALIDAZIONE DEL SISTEMA 59
5.3
Scheda 2
Con questa scheda `e stato possibile fare misure fino ai 50 KHz. In particolare sono state eseguite misure a due valori di frequenza: 7 e 50 KHz.
5.3.1
Misure a 7 KHz
Il condensatore di oscillazione C vale sempre 10 µF, infatti nulla `e cambiato rispetto al caso precedente. Anche il programma di controllo del PIC `e lo stesso della precedente scheda, salvo alcune piccole modifiche sui tempi, che descriveremo.
Con questa scheda sono state eseguite tre diverse tipologie di misure: misure normali, misure del minor loop e misure di un ciclo asimmetrico. Misure normali
Queste misure sono stata fatte in condizioni di uguale saturazione positiva e negativa. Cio`e `e stato misurato un classico ciclo di isteresi simmetrico.
Vediamo i dati salienti della misura:
• Condensatore di oscillazione: C = 10 µF • Frequenza di oscillazione: fr= 7.30 KHz
• Ampiezza temporale dell’impulso parte positiva: 12 µs
• Inizio dell’impulso negativo di aiuto: 70 µs dopo la fine del primo
impulso
• Ampiezza temporale dell’impulso di aiuto parte negativa: 15 µs • Tensione della batteria di carica positiva: E1 = 4.2 V
• Tensione della batteria di carica negativa: E2 = −3.4 V
I grafici rappresentativi delle misure sono,ovviamente, simili a quelli delle misure precedenti.
Si hanno i grafici di B, H e del ciclo di isteresi ”non tagliati”, successi-vamente si mostreranno quelli delle stesse grandezze ”tagliate” per un pi`u facile confronto con gli altri grafici.
CAPITOLO 5. VALIDAZIONE DEL SISTEMA 60
Figura 5.13: Induzione magnetica B (Tesla) in funzione del tempo ( µs) misurata su scheda2 a 7 KHz
Figura 5.14: Campo magnetico H ( A
m) in funzione del tempo ( µs) misurato
CAPITOLO 5. VALIDAZIONE DEL SISTEMA 61
Figura 5.15: Ciclo di isteresi ( T vs. A
m) misurato su scheda2 a 7 KHz
Figura 5.16: Induzione magnetica B (Tesla) ”tagliata” in funzione del tempo ( µs) misurata su scheda2 a 7 KHz
CAPITOLO 5. VALIDAZIONE DEL SISTEMA 62
Figura 5.17: Campo magnetico H (A
m) ”tagliato” in funzione del tempo ( µs)
misurato su scheda2 a 7 KHz
Figura 5.18: Ciclo di isteresi ( T vs. A
CAPITOLO 5. VALIDAZIONE DEL SISTEMA 63 Da figura 5.18 possiamo ricavare alcuni punti salienti del ciclo di istere-si, dati che verranno poi confrontati con gli stessi dati ricavati a frequenze maggiori. • Hc P os = 3mA • Hc N eg = −6mA • Br P os= 0.11 T • Br N eg= −0.06 T • Bsat = 0.5 T
Dove Hc P os ed Hc N eg sono rispettivamente il campo coercitivo positivo e
negativo.
Mentre Br P os e Br N eg sono rispettivamente l’induzione residua positiva
e negativa.
Infine con Bsat si indica il valore dell’induzione di saturazione.
La determinazione sperimentale delle funzioni di Preisach richiede la conoscenza di certi insiemi di curve di magnetizzazione.
Alcuni possibili insiemi sono cicli di isteresi simmetrici di ampiezza cre-scente (minor loop) oppure famiglie di cicli di isteresi ottenute partendo da una saturazione negativa, per arrivare ad un valore di campo positivo e non saturato, sempre crescendo in ampiezza (cicli di isteresi asimmetrici) [7] [8]. Per questo motivo `e stata verificata la possibilit`a di effetuare misure di
minor loop e di cicli asimmetrici con intensit`a via via crescenti.
La determinazione dei vari minor loop si `e rivelata abbastanza sempli-ce. Per ridurre l’intensit`a della saturazione `e sufficiente, infatti, diminuire la tensione dei generatori di carica (E1 ed E2) oppure diminuire l’ampiezza
tem-porale degli impulsi di controllo. Ambedue le operazioni sono di facile esecu-zione attraverso il controllo diretto dei generatori di tensione e un’opportuna riprogrammazione del PIC.
In uno stadio successivo quest’ultima operazione potrebbe essere eseguita senza la necessit`a di riprogrammare il PIC, utilizzando invece un potenzio-metro esterno in grado di controllare la durata degli impulsi di controllo.
Ugualmente semplice `e ottenere cicli asimmetrici sia positivi che
negati-vi. In questo caso si opera riducendo le tensioni E2 o E1 alternativamente,
oppure riducendo la durata degli impulsi di controllo in modo da evitare la saturazione negativa o quella positiva, in base al tipo di asimmetria che si vuole ottenere.