Ringraziamenti
Desidero ringraziare innanzitutto i relatori. Un ringraziamento particolare va al Prof. Lorenzo Pollini per avermi aiutato con pazienza a portare a termine con soddisfazione questo lavoro.
Ringrazio i miei genitori, che mi hanno sempre sostenuto con il loro affetto, facendo per me pi`u di quanto si possa immaginare. E grazie ai miei nonni. Un grazie pieno di amore a Saskia, che mi `e stata sempre vicina e ha fatto s`ı che questi ultimi mesi fossero i pi`u belli della mia vita.
Ringrazio Andrea, Alessandro, Roberto, Giovanni (il Topo), Dario, Michele, Leonardo, Luigi e Marco per la compagnia, l’aiuto nello studio e lo svago durante gli anni di permanenza a Pisa.
Un grazie anche a tutti gli altri amici, in particolare a quelli pi`u “vecchi” Adriano, Arianna, Davide, Enrico (A.C.), Andrea (A.D.), Stefano, Tiziano, Sergio e Stefano (il Gingio), che ci sono sempre.
Sommario
La tesi di laurea realizzata consiste nell’implementazione del simulatore di autoveicolo CAR SIMULATOR in ambiente Matlabr6.5 – Simulinkr 5.0,
con riferimento ad alcuni dei parametri strutturali di una vettura “Ferrari F40”. La presente trattazione si occupa di illustrare il funzionamento del modello in ogni suo aspetto.
Il lavoro `e stato suddiviso in tre parti.
La prima, dedicata a nozioni di base di cinematica dell’autoveicolo, illustra le scelte fatte nella modellazione dei pneumatici, delle sospensioni e della scocca della vettura.
Nella seconda parte si passa a descrivere il modello, soffermandosi sulla parte esterna al simulatore vero e proprio, costituita dall’interfaccia con l’utente e dai blocchi che gestiscono gli ingressi e le uscite.
La terza parte `e riservata alla descrizione dettagliata del blocco CAR, nel quale viene simulato il moto del veicolo in funzione delle sollecitazioni di guida e del profilo del manto stradale. I segnali pi`u significativi vengono inviati all’esterno e possono essere visualizzati in grafica 3D in tempo reale con l’ausilio dell’applicativo DynaWORLDS Professional 1.1.
In appendice sono illustrati i risultati ottenuti dall’esecuzione di una serie di test sul modello, al fine di esaminare il suo comportamento in condizioni di guida tipiche e verificare le affinit`a con la vettura reale.
Indice
Ringraziamenti II
Sommario III
Elenco dei simboli VIII
I
L’autoveicolo
1
1 Introduzione 2 2 Il pneumatico 5 3 La sospensione 8 4 La scocca 10 4.1 Rollio . . . 10 4.2 Beccheggio . . . 11 4.3 Imbardata . . . 11II
L’utilizzo del simulatore
12
5 Introduzione 13
6 L’interfaccia con l’utente 17
6.1 Car Model . . . 18
6.2 Driving Mode . . . 19
6.3.1 Show Car Settings . . . 24
6.3.2 Show Soil Profile . . . 25
6.4 Graphs . . . 26
7 Gli ingressi al simulatore 31 7.1 Driving Input . . . 32 7.1.1 “Step&Ramp” Input . . . 34 Accelerator . . . 34 Brakes . . . 35 Steering–Gear . . . 36 7.1.2 “RealDriving” Input . . . 36 7.2 Soil . . . 38 7.2.1 Roughness . . . 39 7.2.2 Obstacles . . . 39
8 Le uscite del simulatore 41 8.1 Output . . . 41 8.1.1 Chassis . . . 42 Distance . . . 42 Chassis Graphs . . . 43 8.1.2 Tyres . . . 44 Tyre Graphs . . . 45 8.1.3 Suspensions . . . 45 Suspension Graphs . . . 45 8.1.4 Input . . . 46 Input Graphs . . . 47 8.2 Dyna . . . 48 8.2.1 Save Dyna . . . 51
III
Il blocco CAR
52
9 Introduzione 53 10 Wheels 56 10.1 Front Right Wheel . . . 5810.1.1 Tyre & Suspension . . . 60
Hub . . . 61
Tyre Anti Roll&Pitch . . . 67
Suspension . . . 69
Teta Link Angle . . . 72
Susp Length . . . 73
Kingpin Angle . . . 74
Caster Angle . . . 76
Suspension Anti Roll&Pitch . . . 77
Angular Speed . . . 78 Tyre Inertia . . . 80 Linear Speed . . . 81 Camber Angle . . . 83 Tyre Load . . . 85 Pacejka . . . 86
Slip & Alfa . . . 88
Damping Force . . . 90 Delta Rotation . . . 91 10.1.2 Suspension Force . . . 92 10.1.3 Tyre Force . . . 93 10.1.4 Suspension Moment . . . 94 10.1.5 Tyre Moment . . . 95 11 Chassis 99 11.1 Center Of Gravity . . . 101 11.1.1 Aerodynamic . . . 103 Drag . . . 104 Lift . . . 105 11.1.2 Gravity . . . 106 11.1.3 CG Angular Speed . . . 108 11.1.4 CG Linear Speed . . . 109 11.1.5 CG Euler . . . 111
11.1.6 CG Position & Speed . . . 113
Yaw Rotation . . . 115
11.2 Joints & Links . . . 116
11.2.1 Joint & Link FR . . . 118
A Test 121 A.1 Acceleration . . . 121
A.3 Braking With Wheels Blockage . . . 125
A.4 Front Braking . . . 127
A.5 Steer . . . 128
A.6 Steer On Acceleration . . . 129
A.7 Double Steer . . . 130
A.8 Double Steer On Acceleration . . . 131
A.9 Steer On Reverse Gear . . . 132
A.10 Roundabout . . . 133
A.11 Eight . . . 136
A.12 Speed Hump . . . 137
A.13 Stone & Hole . . . 139
A.14 Stone On Steer . . . 141
A.15 Strong Acceleration On Steer . . . 142
A.16 Rear Braking On Steer . . . 144
A.17 Road With Roughness . . . 146
A.18 Conclusioni . . . 147
B Unit`a di misura e nomenclatura 149
C Avvio rapido del simulatore 153
Elenco delle figure 154
Elenco delle tabelle 158
Elenco dei Simboli
g Modulo dell’accelerazione di gravit`a al suolo;
m Massa del pneumatico;
(p, q, r) Velocit`a di rollio, beccheggio e imbardata nel sistema Body Fixed;
(u, v, w) Velocit`a longitudinale, laterale e verticale del baricentro della scocca nel sistema Body Fixed;
vCG Velocit`a lineare del baricentro della scocca;
vT yre Velocit`a lineare del pneumatico;
vT yreT F Velocit`a lineare del pneumatico nel sistema Tyre Fixed; (xBF, yBF, zBF) Sistema di assi solidali alla scocca (Body Fixed);
(xEF, yEF, zEF) Sistema di assi solidali al suolo (Earth Fixed);
(xSF, ySF, zSF) Sistema di assi solidali alla sospensione (Suspension
Fixed);
(xT F, yT F, zT F) Sistema di assi solidali al pneumatico (Tyre Fixed);
(xCG, yCG, zCG) Posizione del baricentro della scocca;
zCG
0 Posizione verticale iniziale del baricentro della scocca;
zHub Posizione verticale del mozzo del pneumatico;
zHub
0 Posizione verticale iniziale del mozzo del pneumatico;
zJoint Posizione verticale dell’attaccatura superiore della
sospensione alla scocca;
zLink Posizione verticale dell’attaccatura del braccetto
inferiore della sospensione alla scocca; zSoil Posizione verticale del suolo sotto la ruota;
ArmJoint Braccio che congiunge il baricentro della scocca
all’attaccatura superiore della sospensione; ArmLink Braccio che congiunge il baricentro della scocca
all’attaccatura del braccetto inferiore della sospensione; ArmSoil−Link Braccio che congiunge l’attaccatura del braccetto
inferiore della sospensione alla scocca con il punto di contatto del pneumatico al suolo;
B Parametro sperimentale per il calcolo di Sx%;
Cx Coefficiente di resistenza aerodinamica;
Cz Coefficiente di portanza aerodinamica;
CM axSusp Massima compressione ammessa dalla sospensione; CM inSusp Minima compressione ammessa dalla sospensione; CM axT yre Massima compressione ammessa dal pneumatico; CM inT yre Minima compressione ammessa dal pneumatico; Cs Rigidezza longitudinale del pneumatico;
ControlT Acc Segnale di controllo della coppia motrice;
D Distanza percorsa dal veicolo;
DSusp Parte costante del coefficiente di smorzamento della
sospensione;
DSuspActive Componente attiva del coefficiente di smorzamento della sospensione;
DT yre Coefficiente di smorzamento del pneumatico;
ESusp Costante elastica della sospensione;
ET yre Costante elastica del pneumatico;
FAerodynamic Forza aerodinamica agente sul baricentro della scocca;
FCG Forza totale agente sul baricentro della scocca;
FGravity Forza di gravit`a agente sul baricentro della scocca;
FSusp Forza generata dalla sospensione;
FT yre Forza generata dal pneumatico;
FW heels Forza esercitata dalle ruote sul baricentro della scocca;
FXX Forza generata dalla ruota XX;
FDamp
x Forza di smorzamento delle oscillazioni generate dallo
slip longitudinale del pneumatico; FDrag
FLowSpeedDamp
x Forza di smorzamento delle oscillazioni generate dallo
slip longitudinale del pneumatico a bassa velocit`a; FP acejka
x Forza longitudinale generata dalle formule di Pacejka;
FP acejka
y Forza laterale generata dalle formule di Pacejka;
FAntiP itch
z Forza verticale generata dal sistema anti–beccheggio;
FAntiRoll
z Forza verticale generata dalla barra anti–rollio;
FLif t
z Forza di portanza aerodinamica;
FSFSusp Forza generata dalla sospensione nel sistema Suspension Fixed;
FT FSusp Forza generata dalla sospensione nel sistema Tyre Fixed; FT FT yre Forza generata dal pneumatico nel sistema Tyre Fixed; HT read Semi-spessore del battistrada del pneumatico;
(Ix, Iy, Iz) Momenti di inerzia della scocca rispetto agli assi del
sistema Body Fixed;
IT yre Momento d’inerzia del pneumatico rispetto all’asse di
rotazione;
KAntiP itch Rigidezza del sistema anti–beccheggio;
KAntiRoll Rigidezza della barra anti–rollio;
LSusp Lunghezza della sospensione;
LSusp0 Lunghezza a riposo della sospensione (assenza di forza applicata);
Link Lunghezza del braccetto inferiore della sospensione;
M Massa della scocca;
MCG Momento della forza totale agente sul baricentro della
scocca;
MSusp Momento della forza generata dalla sopensione sul
baricentro della scocca;
MT yre Momento della forza generata dal pneumatico sul
baricentro della scocca;
MW heels Momento della forza esercitata dalle ruote sul baricentro
della scocca;
MXX Momento della forza generata dalla ruota XX sul
baricentro della scocca; MSelf
R Raggio del pneumatico;
Radius Raggio del pneumatico a riposo (distacco dal suolo);
S Superficie aerodinamica della scocca;
Sδ Sensibilit`a dell’angolo di camber alla sterzatura;
Sφ Sensibilit`a dell’angolo di camber al rollio della scocca;
Sx% Fattore percentuale dello slip longitudinale del
pneumatico;
Segm Lunghezza del segmento che congiunge le due attaccature della sospensione alla scocca; Speed Modulo della velocit`a lineare della scocca; TAcceleration Coppia motrice applicata al pneumatico;
TBraking Coppia frenante applicata al pneumatico;
T yreContact Segnale di contatto/distacco dal suolo del pneumatico; T yreW arning Segnale di warning del pneumatico;
αSteer Angolo di sterzo del pneumatico;
αT oe Angolo di convergenza del pneumatico;
β Angolo descritto dal segmento Segm rispetto al piano della scocca;
γ Angolo di camber del pneumatico;
γ0 Angolo di camber del pneumatico a riposo;
γBF Angolo di camber del pneumatico nel sistema Body
Fixed;
δ Angolo descritto dal pneumatico rispetto alla direzione longitudinale della scocca;
ε Costante di saturazione per il modulo minimo della velocit`a longitudinale;
η Costante di smorzamento delle oscillazioni a bassa velocit`a del pneumatico;
θ Angolo di beccheggio della scocca;
θ0 Angolo di beccheggio della scocca a riposo;
ϑLink Angolo descritto dal braccetto inferiore della sospensione
κ Angolo di kingpin della sospensione;
ξ Angolo di caster della sospensione;
ρ Densit`a dell’aria;
φ Angolo di rollio della scocca;
ψ Angolo di imbardata della scocca;
ω Velocit`a angolare del pneumatico;
ωAvg Velocit`a angolare media di una ruota motrice;
∆Susp Compressione della sospensione;
∆T yre Compressione del pneumatico;
Parte I
1
Introduzione
La prima parte di questo lavoro si occupa di descrivere le principali caratte-ristiche dell’autoveicolo realizzato e le grandezze che ne determinano il moto. Si parler`a del pneumatico, della sospensione e della scocca; ciascuno di essi verr`a illustrato a partire dagli angoli descritti rispetto agli altri componenti o alla terna di assi fissa.
La Tabella 1.1 elenca i sistemi di riferimento considerati nella trattazione.
Terna Nome esteso Orientamento
EF Earth Fixed Solidale al suolo
BF Body Fixed Solidale alla scocca
TF Tyre Fixed Solidale al pneumatico
SF Suspension Fixed Solidale alla sospensione
Tabella 1.1: Sistemi di riferimento
Le prime due terne sono uniche, mentre si hanno quattro terne TF, una per ciascun pneumatico, e quattro terne SF.
La Figura 1.1 rappresenta la geometria del complesso pneumatico–sospen-sione implementato, con riferimento alla ruota anteriore destra. Si tratta di una versione semplificata della geometria MacPherson (v. [1], pag. 159, Fig. 1), nella quale il braccetto inferiore della sospensione (segmento LH) e il braccio contenente il parallelo molla–smorzatore1 (segmento JH) sono
connessi direttamente al mozzo del pneumatico (punto H). I punti L e J rappresentano quindi le due attaccature della sospensione alla scocca, W `e il centro di massa del pneumatico e S `e il punto di contatto al suolo.
1 – Introduzione
Figura 1.1: Geometria MacPherson semplificata
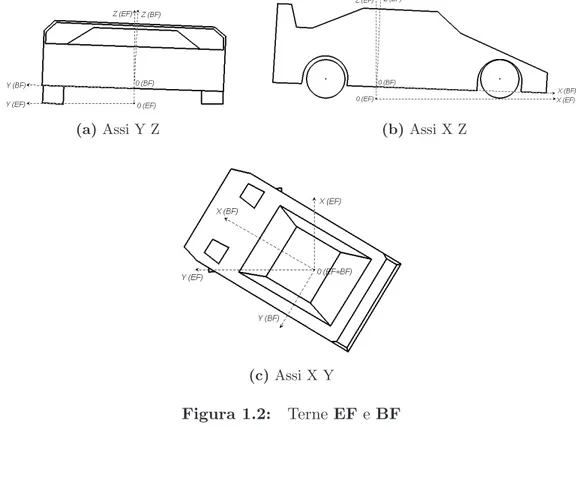
Passando alla scocca, il trittico di Figura 1.2 presenta la vettura da tre di-versi punti di vista, ciascuno allineato ad uno dei tre assi della terna EF, allo scopo di visualizzare posizione e orientamento della terna BF. `E importante notare che l’origine degli assi della terna Body Fixed `e appartenente al piano della scocca. L’auto viene raffigurata all’istante iniziale di una simulazione, nel quale le origini delle due terne risultano allineate verticalmente. Si noti che in Figura 1.2(c) l’auto `e stata ruotata a scopo dimostrativo: all’istante iniziale in realt`a anche gli assi x e y delle due terne risultano sovrapposti verticalmente.
Nelle figure che seguono, inoltre, la terna Earth Fixed verr`a traslata grafica-mente nell’origine delle altre terne allo scopo di illustrare gli angoli formati dagli altri componenti rispetto ad essa, ma la sua posizione `e fissa al suolo nel punto di partenza del veicolo.
Allo stesso modo la terna Body Fixed potr`a essere spostata graficamente sulla sospensione o sul pneumatico, ma la sua origine rester`a nel baricentro del veicolo. `E importante sottolineare il fatto che la terna BF rimane solidale al baricentro del veicolo, poich´e questo influenzer`a le impostazioni in caso di variazioni di assetto.
1 – Introduzione
(a) Assi Y Z (b) Assi X Z
(c) Assi X Y
2
Il pneumatico
Il pneumatico rappresenta il punto di contatto dell’autoveicolo con il terreno, ed `e a partire da esso che si generano le forze che ne consentono il moto. Nel modello realizzato esso si congiunge alla sospensione nel punto H, come evidenziato in Figura 2.1, mentre il contatto con il suolo viene mantenuto tramite il punto S. Il punto W rappresenta il baricentro della ruota, per cui il segmento HW rappresenta il semi-spessore del battistrada.
Figura 2.1: Collegamento del pneumatico agli altri componenti
Nell’immagine viene visualizzato inoltre l’angolo di camber (campanatura), ossia quello descritto dall’asse z della terna TF rispetto all’asse zEF. Si tratta
in pratica dell’inclinazione del pneumatico rispetto alla verticale al suolo, do-vuta prevalentemente al rollio della scocca e anche alla sterzatura per quanto
2 – Il pneumatico
riguarda le ruote anteriori.
Si `e scelto di impostare una campanatura a riposo leggermente negativa allo scopo di contrastare le variazioni d’assetto. Mantenendo i pneumatici sui quali grava la maggior parte del carico (quelli di destra in caso di curva a sinistra, per esempio) il pi`u possibile perpendicolari al terreno, si ottiene infatti una maggiore superficie di contatto pneumatico–suolo e quindi un mi-glioramento della tenuta di strada.
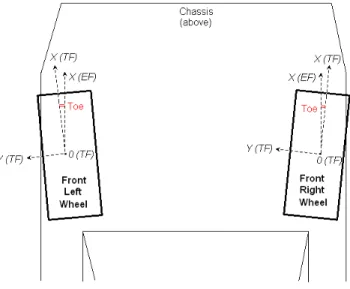
La Figura 2.2 illustra un altro angolo caratteristico del pneumatico anteriore, l’angolo di convergenza (toe). Esso viene impostato staticamente e la sua funzione `e quella di rendere pi`u agevole la marcia in rettilineo della vettura.
Figura 2.2: Angolo di convergenza del pneumatico
`
E stato scelto di impostare una convergenza positiva, con la parte ante-riore delle ruote diretta verso l’esterno. Tale accorgimento, oltre a migliorare il comfort in rettilineo limitando la necessit`a di correggere la traiettoria me-diante l’angolo di sterzo, permette di descrivere curve pi`u strette e precise. Infatti la ruota interna, quella che imposta il movimento, risulta gi`a legger-mente girata nella direzione della sterzata. In caso di convergenza negativa, invece, tale ruota si opporrebbe al movimento, costringendo quindi ad una manovra pi`u larga.
In Figura 2.3 viene rappresentato l’ultimo angolo che caratterizza la posi-zione e l’orientamento di un pneumatico, l’angolo di sterzo. Esso viene imposto uguale su entrambe le ruote anteriori, ma le loro inclinazioni effet-tive risulteranno differenti, poich´e al valore dello sterzo si somma quello della
2 – Il pneumatico
3
La sospensione
La sospensione `e l’elemento strutturale di un’automobile che funge da congiun-zione e da filtro fra la scocca e il pneumatico. Essa infatti smorza le asperit`a del suolo incontrate dalla ruota affinch´e siano avvertite in minima parte dai passeggeri, e d’altra parte consente di ammortizzare il trasferimento di carico sulle quattro ruote durante le manovre.
Figura 3.1: Collegamento della sospensione agli altri componenti
La Figura 3.1 aiuta a chiarire il ruolo della sospensione, mostrando i suoi collegamenti con il resto del veicolo. Il triangolo evidenziato `e formato dal braccio contenente l’elemento molla–smorzatore (JH), la cui lunghezza
dimi-3 – La sospensione
che unisce la scocca al pneumatico e infine dal segmento LJ, inesistente nella realt`a ma utile per effettuare i calcoli di simulazione.
Theta Link `e l’angolo descritto dal braccetto Link rispetto al prolungamen-to dell’asse yBF, ovvero rispetto al piano orizzontale della scocca, mentre
l’angolo Beta `e quello descritto rispetto a tale piano dal segmento LJ; ana-logamente a quanto detto sopra, l’ampiezza dell’angolo Beta ha uno scopo esclusivamente computazionale.
L’inclinazione della sospensione sul piano yBFzBF `e invece descritta
dall’an-golo di Kingpin, misurato rispetto all’asse zBF. Tale angolo influisce
note-volmente sulla dinamica di simulazione, poich´e la sua ampiezza determina le componenti verticale e laterale della forza generata dalla sospensione sul pneumatico. Prendendo in considerazione due route dello stesso asse, in ret-tilineo i due angoli di kingpin risulteranno uguali e opposti annullando le componenti laterali, mentre in caso di curva il loro valore si modificher`a per compensare la forza centrifuga e mantenere la tenuta di strada.
Per quanto riguarda l’inclinazione della sospensione sul piano xBFzBF,
es-sa `e descritta dall’angolo di Caster, presente sulle sole ruote anteriori e avente lo scopo di favorire il riallineamento al termine di una curva. Anche quest’angolo viene misurato rispetto all’asse zBF, come si vede in Figura 3.2.
4
La scocca
La scocca dell’autoveicolo, detta anche massa sospesa1, `e stata modellata
come un corpo rigido a 6 gradi di libert`a, libero cio`e di traslare rispetto agli assi xEF, yEF e zEF e di ruotare attorno ad essi. Gli angoli che descrivono tale
rotazione sono i cosiddetti angoli di Eulero: rollio, beccheggio ed imbardata.
4.1
Rollio
Tale angolo `e definito dalla rotazione sul piano yEFzEF attorno all’asse xEF.
La sua ampiezza risulta limitata dalle caratteristiche strutturali dell’automo-bile (diversamente da quanto accade ad esempio in campo aeronautico) e il suo modulo raramente supera i 6 gradi2. La Figura 4.1 illustra la misurazione
dell’angolo di rollio, di segno positivo in questa configurazione.
Figura 4.1: Angolo di rollio della scocca
1Con il termine massa sospesa si intende quella parte del veicolo che sta al di sopra delle sospensioni.
2Tale valore `e riscontrabile simulando la guida del modello “Jeep” (v. sez. 6.1), mentre per la “F40” il valore assoluto del rollio raggiunge valori di picco inferiori a 1 grado anche
4 – La scocca
4.2
Beccheggio
`
E definito dalla rotazione sul piano xEFzEF attorno all’asse yEF. Come nel
caso del rollio, l’ampiezza `e limitata e il modulo non supera i 3 gradi. Si noti inoltre che le autovetture risultano leggermente inclinate in avanti anche in stato di quiete, quindi l’angolo di beccheggio iniziale `e stato impostato a circa +0.99 gradi.
Figura 4.2: Angolo di beccheggio della scocca
4.3
Imbardata
L’ultimo degli angoli di Eulero `e definito dalla rotazione sul piano xEFyEF
attorno all’asse zEF. Al contrario degli altri due, questo angolo non subisce
limitazioni in ampiezza, essendo il veicolo libero di muoversi sul piano stra-dale. La Figura 4.3 rappresenta la scocca durante una curva a sinistra, che secondo l’orientamento degli assi determina un’imbardata positiva.
Parte II
5
Introduzione
In questa parte della trattazione viene descritta quella parte del modello che funge da collegamento fra il mondo esterno e il simulatore vero e proprio, im-plementato nel blocco CAR di Figura 5.1 e alla cui descrizione dettagliata `e riservata la parte successiva. L’immagine mostra la schermata iniziale del modello, dalla quale si accede a tutte le funzionalit`a offerte.
Per consentire l’interfacciamento in tempo reale con il simulatore grafico, la simulazione viene effettuata in modalit`a Accelerator con passo fisso di 1 millisecondo e utilizzando l’algoritmo ode5(Dormand-Prince) di risoluzione delle equazioni differenziali ordinarie presenti nel modello.
Nei prossimi capitoli si parler`a dell’interfaccia con l’utente, che permette di selezionare le impostazioni di guida e di assetto del veicolo a inizio simula-zione e di visualizzare i grafici desiderati al termina di essa. Verranno quindi descritti i blocchi che implementano gli ingressi, siano essi elaborati via soft-ware oppure ricevuti da un dispositivo di guida esterno. Si parler`a infine delle uscite del sistema, ovvero dei dati disponibili al termine di una simulazione e di quelli inviati in tempo reale e non al visualizzatore grafico.
I due elementi di colore grigio in Figura 5.1 non appartengono ad alcuno dei gruppi sopra citati (interfaccia, ingressi, uscite), pertanto vengono trattati separatamente.
Il blocco Show DynaWorlds Bar offre la possibilit`a di parlare dell’applica-tivo DynaWORLDS Professional, utilizzato durante il lavoro per visualizzare il moto del veicolo in real–time e il cui setup `e allegato alla presente tratta-zione1. Si tratta di un programma di grafica 3D, realizzato dal Prof. Ing.
5 – Introduzione
5 – Introduzione
Lorenzo Pollini e dall’ Ing. Gaetano Mendola, che dialoga con Matlab rice-vendo alcuni dati significativi della simulazione e mostrando i corrispondenti movimenti della vettura. Per maggiori dettagli sull’interfacciamento fra il simulatore e questo programma si rimanda alla sezione 8.2.
La DynaWorlds Bar, visualizzata in azione nella Figura 5.2, `e un blocco al quale `e stata data la forma di una barra orizzontale, posizionata nella parte superiore dello schermo, che consente di avviare e arrestare l’esecuzione e di visualizzare il modello di vettura corrente senza abbandonare la scher-mata grafica di DynaWorlds. Negli esempi mostrati si stanno effettuando simulazioni utilizzando l’assetto della “F40” (a) e della “Jeep” (b).
(a) “F40”
(b) “Jeep”
5 – Introduzione
Il blocco RT Synchronization `e incluso nel DynaWORLDS PRO Tool-box allegato. Esso consente di impostare un tempo di campionamento, che indica ogni quanti secondi2 viene effettuato l’allineamento fra il tempo di
si-mulazione e il tempo reale, e un fattore moltiplicativo, che consente di rallen-tare o accelerare il real–time. `E stato impostato un tempo di campionamento pari a 0.02 sec, mentre il fattore moltiplicativo vale 1.
6
L’interfaccia con l’utente
I blocchi descritti in questo capitolo sono quelli posizionati nella parte infe-riore della schermata iniziale. La prima operazione da effettuare per l’utiliz-zo del modello `e l’esecuzione tramite doppio click del mouse sul blocco che implementa la funzionalit`a Load Initial Data, che carica i dati di avvio contenuti nei seguenti M-files allegati:
• Data Pacejka, che contiene i coefficienti utilizzati per simulare il com-portamento del pneumatico;
• Data Parameters, che contiene la dichiarazione dei parametri caratte-ristici dell’autoveicolo e la definizione di quelli comuni a tutti i modelli realizzati;
• Soil Remove Roughness, che imposta il terreno su cui si svolge la simulazione perfettamente liscio;
• Soil Remove Obstacles, che imposta il terreno su cui si svolge la simulazione privo di ostacoli;
• Test Template, che contiene la dichiarazione e l’inizializzazione di tutte le variabili necessarie a realizzare un test via software mediante ingressi da file;
• Graph Default, che abilita la visualizzazione grafica dei segnali di u-scita provenienti dalla scocca, ma non di quelli relativi a pneumatici, sospensioni e ingressi;
• Dyna Default, che non abilita il salvataggio in memoria delle variabili da inviare al visualizzatore di grafica 3D.
6 – L’interfaccia con l’utente
Il significato di alcuni di questi nomi risulter`a chiaro in seguito. Si noti che il blocco di cui si `e parlato `e vuoto al suo interno e puramente esecutivo; il suo funzionamento `e stato realizzato inserendo il nome degli M-files nella finestra raggiunta mediante il percorso:
Right Click → Block properties → Callbacks → OpenFcn.
6.1
Car Model
Figura 6.1: Car Model
Questa funzionalit`a permette di selezionare il modello di vettura con il quale effettuare la simulazione. La configurazione di riferimento `e quella della vettura Ferrari F40, sui cui dati `e stato costruito l’intero simulatore1
e in particolare il modello “F40”. A partire da esso, modificando alcune delle sue caratteristiche strutturali, sono stati creati successivamente altri due modelli: la “Jeep”, avente il piano della scocca e il baricentro decisamente rialzati rispetto al suolo, e la “Dyane”, dall’omonimo modello della Citro¨en, il cui assetto e comfort di marcia sono opposti a quello di una Ferrari. Come gi`a visto in Figura 5.2, per i primi due modelli `e stata allestita la visualizzazione grafica su DynaWorlds, rispettivamente nei file F40.dwp e Jeep.dwp; `e inoltre presente il file F40Track.dwp, nel quale la “F40” pu`o percorrere un circuito da gara, molto utile per le prove di guida. Per quanto riguarda la “Dyane”, non `e presente un file apposito contenente la sua veste grafica, ma `e comunque possibile visualizzarne correttamente il moto utilizzando F40.dwp2.
Il doppio click su uno dei tre blocchi esegue lo script corrispondente, nel quale
1Le dimensioni e il peso della scocca, contenuti nel file Data Parameters, sono quelli del modello reale, dal sito ufficiale http://www.ferrariworld.com/FWorld/fw/index.jsp.
2Si sconsiglia l’utilizzo di Jeep.dwp poich´e le ruote del modello “Jeep” sono maggiorate rispetto a quelle degli altri due e la grafica `e impostata di conseguenza.
6 – L’interfaccia con l’utente
vengono definiti i parametri caratteristici. La Tabella 6.1 mette a confronto i tre modelli, evidenziando le differenze principali.
“F40” “Jeep” “Dyane”
Raggio Pneumatico (m) 0.26 0.33 0.26
Lunghezza Sospensione (m) 0.1855 0.363 0.2505
Cost. Elastica Sosp. (N/m) 56000 28000 42000
Coeff. Smorzam. Sosp. (Ns/m) 8500 2125 1062.5
Quota Iniziale Baricentro (m) 0.1203 0.3246 0.1612
Posiz. Longitudinale Baricentro Arretrata Centrale Avanzata
Trazione Posteriore 4×4 Anteriore
Barre Anti-rollio S`ı No No
Sistema Anti-beccheggio S`ı S`ı No
Tabella 6.1: Differenze fra i modelli
Nel caso di impostazioni differenti sulle quattro ruote, viene visualizzato il valore medio.
Si nota che, per quanto riguarda le sospensioni e la posizione verticale del baricentro, la “Dyane” costituisce una sorta di via di mezzo fra gli altri due modelli, fatta eccezione per i coefficienti di smorzamento. Infatti la vettura della Citro¨en `e famosa per la morbidezza delle sue sospensioni, per cui questi valori risultano estremamente bassi: il loro valore medio `e 1/8 di quello della “F40” e la met`a di quello della “Jeep”.
6.2
Driving Mode
Il simulatore offre la scelta fra due modalit`a di guida: “RealDriving” e “Step&Ramp”.
Figura 6.2: Driving Mode
La “RealDriving” `e utilizzabile solo nel caso si disponga di una peri-ferica di gioco. Durante la realizzazione di questo lavoro `e stato utilizzato in particolare il dispositivo Logitechr WingMan Formula Force, completo
6 – L’interfaccia con l’utente
di volante e pedaliera, in dotazione al D.S.E.A. della Facolt`a di Ingegneria dell’Universit`a di Pisa, del quale sono allegati i driver di setup3.
Il simulatore non fornisce un feedback sul volante per la resistenza relativa al contatto pneumatico–suolo o per eventuali ostacoli incontrati. Tuttavia in grafica sono visualizzate tutte le forze generate da tale contatto, dando la possibilit`a di effettuare un controllo visivo sull’andamento del moto: ad esempio, i vettori che rappresentano le forze centrifughe agenti sui pneuma-tici in curva consentono di rendersi conto, con un minimo di esperienza di guida sul modello, del valore limite al di sopra del quale il veicolo perde ade-renza.
La modalit`a “Step&Ramp” consente invece di guidare l’autoveicolo me-diante ingressi generati via software da Simulink stesso, attraverso, per l’ap-punto, blocchi di Step e Ramp. Cliccando su Select A Test si pu`o scegliere una delle prove gi`a allestite che mettono in evidenza alcuni comportamenti tipici della vettura, verificando che il suo comportamento sia simile a quello del modello reale.
6.2.1
Select A Test
Si tratta di 17 prove, costruite ad hoc per il modello “F40”, nelle quali `e testato il comportamento del veicolo in alcune delle situazioni di guida pi`u caratteristiche, come ampiamente illustrato in Appendice A. Negli M-files relativi al caricamento della prova, eseguiti all’atto del doppio click, sono descritti gli ingressi forniti al simulatore e in alcuni casi i risultati ottenuti in termini di prestazioni. Gli stessi test possono essere effettuati anche sugli altri due modelli; in alcuni casi ci`o `e stato fatto per mettere maggiormente in evidenza le differenze fra i veicoli realizzati.
Come si vede dalla Figura 6.3(a), alcune di queste prove modificano l’asset-to della vettura (ad es. la Front Braking) o il profilo del suolo (Speed Hump). Pertanto, all’esecuzione, un segnale di warning del tipo di Figura 6.3(b) ricorda di ripristinare, al termine della prova, la condizione iniziale mediante l’apposito bottone. In particolare, l’esecuzione delle funzionalit`a Restore, dopo una frenata sulle sole ruote anteriori o posteriori, ripristina i coefficienti di ripartizione della coppia frenante precedenti alla prova; le funzionalit`a Remove, relative ai test in cui si modifica il profilo del suolo, eliminano gli ostacoli inseriti senza modificare la ruvidit`a, o viceversa.
6 – L’interfaccia con l’utente
I test sono suddivisi in gruppi a seconda del tipo di sollecitazioni sulla vet-tura; si rimanda all’Appendice A per il dettaglio di tutte le prove realizzate, ciascuna accompagnata da grafici che mostrano l’andamento delle grandezze pi`u significative.
(a) Select A Test (b) Test Warning
Figura 6.3: Test
6.3
Soil & Car Settings
L’accesso a questo menu permette all’utente di modificare le impostazioni di default di assetto della vettura e il profilo stradale.
Per quanto riguarda le variazioni di assetto, viene data la possibilit`a di:
6 – L’interfaccia con l’utente
Figura 6.4: Soil & Car Settings
ad agire sulle sue componenti attive, nulle per default; la variazione `e li-mitata entro un determinato range, assicurando che il valore impostato non sia mai prossimo allo zero onde evitare un assetto eccessivamente instabile;
• rimuovere/inserire le barre anti–rollio e il sistema anti–beccheggio della vettura;
• modificare la ripartizione della frenata sugli assi anteriore e posteriore, per effettuare test particolari sul comportamento della vettura; il valore di default dei coefficienti `e uguale su entrambi gli assi, e ogni esecu-zione della funzionalit`a incrementa il coefficiente scelto, decrementan-do automaticamente l’altro in modecrementan-do che la somma risulti sempre pari
6 – L’interfaccia con l’utente
all’unit`a4;
• spostare avanti/indietro la posizione del baricentro della vettura, all’in-terno di un range di valori determinati da prove sperimentali sull’as-setto della vettura; ciascun doppio click sull’apposito bottone sposta il baricentro di 10 centimetri, rimanendo nell’intervallo [-0.5 m, 0.5 m] rispetto alla posizione di default5;
• incrementare/decrementare la massa sospesa, per simulare la presenza di passeggeri o l’alleggerimento della scocca; l’esecuzione della funzio-nalit`a modifica la massa di 50 kg nell’intervallo [-250 kg, 250 kg] rispetto al valore di default6;
• selezionare un tipo di trazione (anteriore, posteriore o 4×4) diverso da quello di default; anche in questo caso la scelta di una modalit`a annulla automaticamente l’impostazione precedente;
• inserire la marcia indietro; essendo il modello privo del cambio, questa pu`o essere selezionata all’inizio di una simulazione e rimossa solo al termine.
Inoltre `e possibile annullare ciascuna delle singole modifiche utilizzando l’apposito bottone, oppure ripristinare l’assetto di default mediante la fun-zionalit`a Restore All Default Settings.
Passando al profilo del suolo, `e possibile:
• inserire una ruvidit`a del manto stradale con picchi positivi e negativi di 1 cm;
• incrementare/decrementare tale ruvidit`a, da un minimo di 0.5 cm fino ad un massimo di 3 cm di picco; quest’ultimo `e un valore piuttosto elevato e la “F40” si trova in seria difficolt`a alle prese con tale terreno, cosa che non accade invece per gli altri due modelli;
• inserire un dosso artificiale alto 20 cm in un istante casuale della si-mulazione (fra 0 e 50 sec), oppure spostarlo in un altro istante scelto casualmente;
4Il sistema garantisce inoltre che il valore dei coefficienti rimanga nell’intervallo [0,1]. 5Le prestazioni del veicolo possono subire flessioni avvicinandosi agli estremi.
6L’eccessivo aumento della massa quando il baricentro `e molto avanzato/arretrato pu`o peggiorare ulteriormente le prestazioni.
6 – L’interfaccia con l’utente
• inserire un sasso di 12 cm e una buca di 5 cm in due istanti casuali della simulazione (fra 0 e 50 sec), oppure spostarli.
`
E inoltre possibile annullare ciascuna modifica mediante l’apposito bot-tone, oppure ripristinare il suolo perfettamente liscio con la funzionalit`a Re-set Soil Profile.
Si noti che la ruvidit`a del suolo non esclude la presenza di ostacoli lungo il cammino e viceversa. Per esigenze implementative tuttavia non `e consentito inserire un dosso artificiale insieme a un sasso e a una buca.
6.3.1
Show Car Settings
Questa finestra consente di visualizzare in corso di simulazione le imposta-zioni correnti riguardo all’assetto della vettura, attraverso l’uso di Display che mostrano il valore di alcune variabili.
Figura 6.5: Show Car Settings
La Figura 6.5 mostra l’assetto di default della “F40”. Simulink consente di visualizzare solo valori numerici in fase di simulazione, pertanto `e stato scelto di mostrare i seguenti dati:
- valore dello smorzamento delle sospensioni [Ns/m];
6 – L’interfaccia con l’utente
- ripartizione della coppia frenante sugli assi; la Tabella 6.2 mostra il significato dei coefficienti visualizzati;
- posizione longitudinale del baricentro sul piano della scocca rispetto al punto medio della distanza fra i due assi [m]; la Tabella 6.3 mostra le posizioni di default per i tre modelli;
- massa della scocca [kg];
- 1 per indicare il tipo di trazione selezionata, 0 per gli altri due;
- 1 per indicare l’avvenuto inserimento della marcia indietro, 0 se essa `e inattiva. Coefficiente Ripartizione 1 Solo Anteriore 0.5 In Avanti 0 Centrata -0.5 Indietro -1 Solo Posteriore
Tabella 6.2: Ripartizione della frenata
Modello Posizione (m)
“F40” -0.223
“Jeep” 0
“Dyane” 0.223
Tabella 6.3: Posizione longitudinale di default del baricentro
6.3.2
Show Soil Profile
Come per l’assetto della vettura, lo stato del manto stradale pu`o essere visua-lizzato in fase di simulazione cliccando su questa finestra, nella quale vengono visualizzati:
- ruvidit`a massima del suolo [m]
- istante di simulazione in cui si incontra un dosso artificiale, 0 se non ne sono presenti;
- istante di simulazione in cui si incontra un sasso, 0 se non ne sono presenti;
6 – L’interfaccia con l’utente
- istante di simulazione in cui si incontra una buca nel terreno, 0 se non ne sono presenti.
La figura 6.6 mostra una ruvidit`a massima del suolo di 2.5 centimetri e segnala la presenza di una buca dopo 11 secondi di simulazione e di un sasso dopo 47.
Figura 6.6: Show Soil Profile
6.4
Graphs
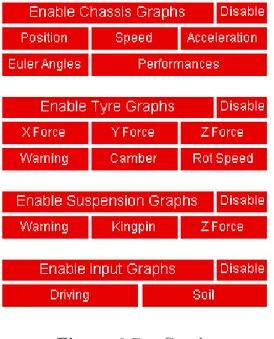
Quest’ultimo menu gestisce la possibilit`a di visualizzare i grafici relativi all’andamento delle principali variabili del sistema al termine di una simula-zione.
Per tracciare i grafici `e necessario salvare i dati richiesti su disco, ma questo salvataggio pu`o rallentare l’andamento della simulazione anche in maniera notevole7. Come si vede in Figura 6.7, a seconda delle esigenze di
simula-zione viene quindi data la possibilit`a di abilitare o disabilitare il salvataggio relativo ai segnali provenienti dalla scocca, dai pneumatici, dalle sospensio-ni e dai blocchi di ingresso al modello; per default sono abilitati solo quelli riguardanti la scocca.
I bottoni con i nomi delle variabili consentono di visualizzare, mediante doppio click, le figure contenenti i grafici corrispondenti. Se la grafica per quel gruppo di segnali `e disabilitata, il sistema invia un messaggio di errore. Per quanto riguarda la scocca, `e possibile visualizzare:
Position - Posizione del baricentro della scocca nelle tre coordinate del sistema Earth Fixed;
7Soprattutto se sullo stesso computer vengono eseguiti contemporaneamente Simulink e DynaWorlds.
6 – L’interfaccia con l’utente
Figura 6.7: Graphs
Speed - Velocit`a del baricentro della scocca nelle tre coordinate del sistema Earth Fixed8;
Accleration - Accelerazione del baricentro della scocca nelle tre coordinate del sistema Body Fixed;
Euler - Angoli di rollio, beccheggio e imbardata descritti dalla scocca ris-petto al sistema Earth Fixed;
Performances - Traiettoria descritta dal veicolo e prestazioni:
Elapsed Time - Durata della simulazione;
Covered Distance - Distanza percorsa;
Maximum Speed - Massima velocit`a raggiunta;
Average Speed - Velocit`a media sostenuta.
La Figura 6.8 mostra il risultato dell’esecuzione della funzionalit`a Per-formances dopo aver percorso il circuito da gara con l’assetto di guida della “F40”(file F40Track.dwp). L’etichetta Max Speed Point segnala il punto in cui `e stato registrato il picco di velocit`a.
8Le componenti longitudinale e laterale vengono ruotate mediante l’angolo di imbardata per allinearle alla scocca (si veda il paragrafo Yaw Rotation a pag. 115).
6 – L’interfaccia con l’utente
Figura 6.8: Circuito da gara in “F40”
Per quanto riguarda i pneumatici, sono disponibili i grafici dei segnali seguenti:
X Force - Forza longitudinale generata dal contatto pneumatico–suolo;
Y Force - Forza laterale generata dal contatto pneumatico–suolo;
Z Force - Forza verticale generata dal contatto pneumatico–suolo;
Warning - Segnale di warning del pneumatico;
Camber - Angolo di camber del pneumatico rispetto al suolo;
Rot Speed - Velocit`a angolare di rotazione del pneumatico. Nel caso delle sospensioni, `e possibile visualizzare:
Warning - Segnale di warning della sospensione;
Kingpin - Angolo di kingpin della sospensione;
Z Force - Forza verticale generata dalla sospensione.
Infine, per quanto riguarda gli ingressi al modello, sono disponibili i grafici relativi a:
6 – L’interfaccia con l’utente
Driving - Ingressi di guida (coppia motrice, coppia frenante, angolo di sterzo);
Soil - Profilo del suolo incontrato dai pneumatici.
La Figura 6.9 mostra la schermata dei grafici relativi agli ingressi di guida; coppia frenante e coppia motrice per ciascun pneumatico sono nelle posizioni corrispondenti9, mentre l’angolo di sterzo `e posizionato al centro. I grafici si
riferiscono ad una frenata in curva sul modello “F40”.
Figura 6.9: Ingressi di guida per una frenata in curva con la “F40”
In Figura 6.10 `e mostrato il profilo di un terreno irregolare, sul quale vengono incontrati un sasso sotto le ruote di sinistra e una buca sotto quelle di destra.
9Immaginando di visualizzare la vettura dall’alto, i grafici relativi a ciascuna ruota risultano posizionati all’estremit`a corrispondente (v. Tabella 7.1 a pag. 31). Questo accorgimento verr`a utilizzato spesso per il posizionamento dei blocchi nel modello.
6 – L’interfaccia con l’utente
7
Gli ingressi al simulatore
Al modello di autoveicolo giungono due tipi di dati, generati dagli unici ele-menti di contatto con il mondo esterno: gli ingressi derivanti dalla guida e il profilo del suolo1. In questo capitolo verranno descritti i blocchi, posizionati
nella parte sinistra della schermata iniziale, che elaborano tali ingressi e li inviano al blocco Car.
Poich´e si entra nella parte operativa del simulatore, da adesso in poi ogni blocco sar`a descritto a partire dagli ingressi e dalle uscite che lo caratteriz-zano; per quanto riguarda le grandezze utilizzate al suo interno e non ancora menzionate, si rimanda all’Elenco dei Simboli per il significato e all’Appen-dice B per le unit`a di misura e la corrispondenza di nomi fra la trattazione e il modello Simulink.
La Tabella 7.1 illustra la nomenclatura scelta per indicizzare le quattro ruote in base alla loro posizione.
Sigla Nome esteso Significato
FL Front Left Ruota anteriore sinistra FR Front Right Ruota anteriore destra RL Rear Left Ruota posteriore sinistra RR Rear Right Ruota posteriore destra
Tabella 7.1: Indicizzazione delle ruote secondo la posizione
Inoltre, per evitare ripetizioni, si utilizzeranno in molti casi i simboli ibridi di Tabella 7.2.
1In realt`a provengono dal mondo esterno anche le forze aerodinamiche agenti sulla scocca, ma esse non vengono considerate come ingressi puri poich´e la loro intensit`a dipende dallo stato del sistema.
7 – Gli ingressi al simulatore
FX Front Left/Right Ruota anteriore
RX Rear Left/Right Ruota posteriore
XX Front/Rear Left/Right Ruota generica
Tabella 7.2: Simboli ibridi
In seguito si adotter`a questa convenzione per indicizzare non solo le ruote, ma ciascun componente del modello avente tale posizione rispetto al baricentro del veicolo.
7.1
Driving Input
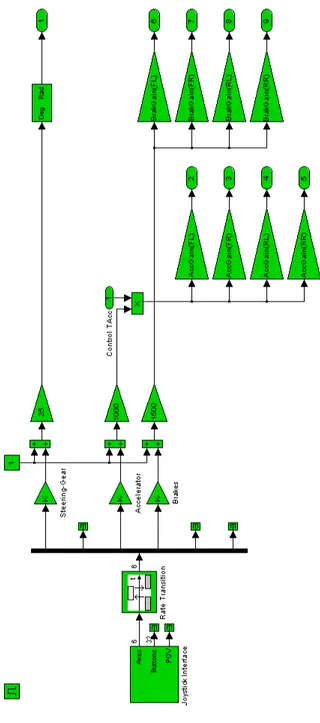
Ingressi: OmegaXX
Uscite: ASteer, TAccXX, TBrakXX
A questo livello, la scelta della modalit`a di guida fatta in precedenza viene applicata al modello mediante l’utilizzo del parametro RealDriving: se il suo valore `e 1 viene attivato il blocco che riceve i dati dal dispositivo di guida esterno, mentre in caso contrario si attiva il blocco per la generazione di ingressi via software.
La presenza delle velocit`a angolari delle quattro ruote in ingresso `e legata all’assenza nel modello di un blocco motore vero e proprio dotato di cambio. Infatti, la coppia fornita in ingresso viene trasmessa integralmente alle ruote motrici, con il rischio che accelerazioni eccessive provochino uno slittamento continuo a discapito delle prestazioni. Il problema `e stato riscontrato nel caso particolare di vettura a trazione anteriore con baricentro arretrato: le ruote motrici, poco caricate dal peso della vettura, perdevano facilmente aderenza quando la coppia applicata superava un valore di soglia.
La variabile di controllo `e generata calcolando la media delle velocit`a angolari delle ruote di uno stesso asse2 e considerando quella massima per trascurare
le ruote non motrici
ωAvg = max · |ωF L| + |ωF R| 2 , |ωRL| + |ωRR| 2 ¸ . (7.1)
Il valore ottenuto, pari al modulo della velocit`a angolare media di una ruota
7 – Gli ingressi al simulatore
Figura 7.1: Driving Input
motrice, viene quindi dato in ingresso ad un blocco Look–Up Table che ge-nera la variabile di controllo desiderata
ControlT Acc = 1 se 0 6 ωAvg 6 200 1 − 500−ωAvg 300 se 200 < ωAvg < 500 0 se 500 6 ωAvg. (7.2)
7 – Gli ingressi al simulatore
Per quanto riguarda le uscite, esse sono ottenute da una barriera di Switch, anch’essi pilotati dalla RealDriving, che prendono in considerazione le uscite del blocco abilitato.
7.1.1
“Step&Ramp” Input
Ingressi: ControlTAcc
Uscite: ASteer, TAccXX, TBrakXX
Figura 7.2: “Step&Ramp” Input
Questo blocco funge da contenitore per i tre sottoblocchi che generano, se abilitati, gli ingressi via software al modello. Negli M-files di test allegati si possono visualizzare i valori assegnati alle costanti che inizializzano gradini e rampe posti in ingresso al sistema.
Accelerator
Ingressi: ControlTAcc Uscite: TAccXX
La Figura 7.3 mostra il blocco Accelerator e i valori impostati nella maschera di uno dei suoi ingressi. L’accelerazione viene simulata con una rampa per evitare lo slittamento delle ruote motrici, mentre il rilascio del pedale `e istantaneo mediante un ingresso a gradino.
Come illustrato in precedenza, la variabile di ingresso ControlTAcc viene moltiplicata per la coppia motrice in modo da controllarne l’intensit`a.
7 – Gli ingressi al simulatore
(a) Accelerator (b) FirstAcc Mask
Figura 7.3: “Step&Ramp” Accelerator
Brakes Ingressi:
-Uscite: TBrakXX
La frenata `e simulata mediante un gradino; per il rilascio del pedale `e stato realizzato un meccanismo che sottrae alla coppia frenante il suo stesso valore quando la variabile BrakEndValue `e posta ad 1 (Figura 7.4).
7 – Gli ingressi al simulatore
Steering–Gear Ingressi: -Uscite: ASteer
L’angolo di sterzo sulle ruote anteriori `e simulato mediante gradini, il cui segnale viene fatto passare attraverso filtri con funzione di trasferimento del 2◦ ordine; in questo modo si evitano scatti sulle ruote, pur mantenendo una
risposta pronta.
(a) Steering–Gear (b) Steer1Start & Steer1End Graph
Figura 7.5: “Step&Ramp” Steering–Gear
La Figura 7.5(b) mostra l’andamento dell’angolo durante una sterzata a sinistra di 20 gradi (Steer1Start) seguita dal raddrizzamento del volante (Steer1End): in entrambi i casi il segnale raggiunge il valore desiderato in meno di 1 secondo.
7.1.2
“RealDriving” Input
Ingressi: ControlTAcc
Uscite: ASteer, TAccXX, TBrakXX
Questo blocco si occupa di gestire gli ingressi provenienti dalla periferica di gioco.
La Joystick Interface, contenuta nel toolbox AeroSim Blockset di Simulink allegato, interpreta i dati provenienti dal dispositivo di guida organizzandoli
7 – Gli ingressi al simulatore
Figura 7.6: “RealDriving” Input
in sei linee di ingresso, tre delle quali risultano significative per questo simu-latore3. Il segnale relativo all’angolo di sterzo viene riportato nell’intervallo
[−1,1] e quelli di coppia motrice e coppia frenante nell’intervallo [0,1], quindi
3Nel caso di realizzazione del blocco motore, l’uscita Buttons dell’interfaccia `e in grado di inviare al modello anche i segnali di pressione sui pulsanti di cambio di marcia sul volante.
7 – Gli ingressi al simulatore
si applica un guadagno per generare valori in scala reale.
Ingresso Range
Steering–Gear [−25, + 25] deg Accelerator [0,1000] Nm
Brakes [0,1500] Nm
Tabella 7.3: Range di input in modalit`a “RealDriving”
La Tabella 7.3 mostra le scelte effettuate per i tre ingressi. Infine i va-lori di coppia motrice e frenante vengono ripartiti sulle ruote secondo le impostazioni dell’utente e inviati al simulatore, come mostra la Figura 7.6.
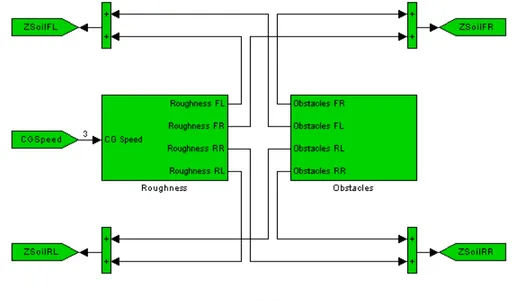
7.2
Soil
Ingressi: CGSpeed Uscite: ZSoilXX
In questo blocco viene generato il profilo del suolo incontrato dall’auto-veicolo in ogni istante della simulazione, secondo le impostazioni dell’utente viste in precedenza. Per default si hanno tutte le uscite nulle, equivalenti a un suolo perfettamente liscio.
A questo livello si calcola la somma delle uscite dei due sottoblocchi che si occupano della ruvidit`a e della presenza di ostacoli lungo il cammino.
7 – Gli ingressi al simulatore
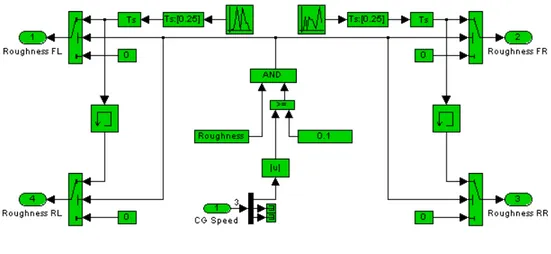
7.2.1
Roughness
Ingressi: CGSpeed Uscite: RoughnessXX
La ruvidit`a del suolo viene implementata generando per ogni ruota ante-riore una sequenza uniforme di numeri casuali, compresa nell’intervallo fra il picco minimo consentito e quello massimo, impostati dall’utente e contenuti nella variabile di controllo RoughMax.
Figura 7.8: Soil Roughness
A ogni ruota posteriore viene inviato lo stesso profilo dell’anteriore corris-pondente, ritardato mediante un blocco Memory. Poich´e si tratta di segnali generati nel tempo e non nello spazio, la ruvidit`a viene annullata quando la velocit`a di avanzamento scende al di sotto di 0.1 m/s, al fine di evitare impulsi sotto le ruote a veicolo fermo.
7.2.2
Obstacles
Ingressi:
-Uscite: ObstaclesXX
Quest’ultimo blocco di ingressi per il modello si occupa di creare gli ostacoli selezionati dall’utente.
Poich´e la presenza di questi ultimi determina variazioni significative della quota del suolo, si evita di utilizzare gradini; variazioni istantanee di quota potrebbero infatti generare sui pneumatici forze poco realistiche e dannose per il modello, per cui si preferisce realizzare profili trapezoidali mediante
7 – Gli ingressi al simulatore
Figura 7.9: Soil Obstacles
l’utilizzo di rampe. La Figura 7.10 mette a confronto le variazioni di quota del suolo in corrispondenza di un dosso artificiale (a) e di un sasso (b): nel caso del rallentatore viene raggiunta una quota maggiore, ma con una pendenza molto minore di quella relativa al sasso, il cui profilo si avvicina maggiormente a quello di un impulso.
(a) Speed Hump (b) Stone
8
Le uscite del simulatore
In questo capitolo viene descritto il funzionamento dei blocchi posizionati nella parte destra della schermata iniziale, che ricevono i dati generati nel blocco CAR e ne consentono la visualizzazione. Di particolare importanza `e il blocco Dyna, al quale giungono tutti i segnali necessari per l’interfaccia-mento in tempo reale con DynaWorlds. Il blocco Output si occupa invece di salvare i dati di ogni simulazione per visualizzare i grafici al termine di essa.
8.1
Output
Ingressi: -Uscite:
-Questo blocco funge da contenitore per i quattro sottoblocchi di Figura 8.1. Questi ricevono i segnali relativi alla scocca, ai pneumatici e alle so-spensioni, provenienti dall’interno del blocco CAR, e i segnali dai blocchi Driving Input e Soil, per la visualizzazione grafica degli ingressi forniti al simulatore.
8 – Le uscite del simulatore
8.1.1
Chassis
Ingressi: CGPos, CGSpeed, CGAccel, CGEuler
Uscite: DWPosX, DWPosY, DWPosZ, DWSpeedX, DWRoll, DWPitch, DWYaw
Figura 8.2: Chassis Output
A questo blocco giungono tutti i segnali necessari alla visualizzazione grafica dei movimenti della scocca; le misure degli angoli di Eulero sono convertite da radianti in gradi e alcuni dei segnali presenti vengono inviati a DynaWorlds.
Infine, se la variabile di controllo ChassisGraph vale 1, i segnali giungono al sottoblocco Chassis Graphs per il salvataggio in memoria.
Distance
Ingressi: CGSpeed Uscite: Distance
La velocit`a lineare della scocca viene utilizzata per calcolare la distanza percorsa durante la simulazione1, secondo la formula
8 – Le uscite del simulatore D = s· Z 0 vCG x ¸2 + · Z 0 vCG y ¸2 . (8.1)
Il valore viene calcolato istante per istante, per cui, per avere la distanza totale percorsa al termine della simulazione, sar`a preso in considerazione solamente l’ultimo campione.
Figura 8.3: Distance
Chassis Graphs
Ingressi: Position, Speed, Distance, Acceleration, Euler Uscite: Position, Speed, Distance, Acceleration, Euler
Se abilitato, questo blocco si occupa di salvare in corso di simulazione i se-gnali riguardanti posizione, velocit`a, accelerazione, distanza percorsa e angoli di Eulero della scocca negli appositi Workspace, utilizzati poi dagli M-files eseguibili dal menu Graphs dell’interfaccia con l’utente per il tracciamento dei grafici finali.
8 – Le uscite del simulatore
8.1.2
Tyres
Ingressi: FxTyreXX, FyTyreXX, FzTyreXX, OmegaXX, GammaXX, TyreWarnXX Uscite:
-Quanto detto per la scocca `e valido anche nel caso delle uscite dei pneu-matici, con la differenza che qui ogni segnale proviene da un diverso blocco di una diversa ruota. Nel caso la variabile TyreGraph valga 1 in seguito all’at-tivazione da parte dell’utente dal menu Graphs dell’interfaccia, i fili relativi allo stesso tipo di segnale dalle quattro ruote vengono raggruppati e inviati a Tyre Graphs.
8 – Le uscite del simulatore
Tyre Graphs
Ingressi: FxTyre, FyTyre, FzTyre, Omega, Gamma, TyreWarn Uscite: FxTyre, FyTyre, FzTyre, Omega, Gamma, TyreWarn
Se abilitato, questo blocco salva le variabili di ingresso in altrettanti Workspace per la realizzazione di grafici al termine della simulazione.
Figura 8.6: Tyre Graphs
8.1.3
Suspensions
Ingressi: FzSuspXX, KingpinXX, SuspWarnXX Uscite:
-Per quanto riguarda le sospensioni, le variabili da visualizzare in grafica sono in numero minore in quanto, rispetto ai pneumatici, viene a mancare l’elemento di contatto con il suolo. Pertanto sono visualizzati solo tre segnali, considerati i pi`u significativi. Ancora una volta `e un segnale di controllo, SuspGraph in questo caso, a determinare l’accesso al sottoblocco Suspension Graphs.
Suspension Graphs
Ingressi: FzSusp, Kingpin, SuspWarn Uscite: FzSusp, Kingpin, SuspWarn
Questo blocco, se abilitato, salva i segnali nei Workspace omonimi, come mostrato in Figura 8.8.
8 – Le uscite del simulatore
Figura 8.7: Suspensions Output
Figura 8.8: Suspension Graphs
8.1.4
Input
Ingressi: ASteer, TAccXX, TBrakXX, ZSoilXX Uscite:
-A questo livello vengono raccolti i segnali in uscita dai blocchi di ingresso descritti nel Capitolo 7, al fine di permettere la visualizzazione delle solleci-tazioni del mondo esterno sul veicolo.
Se l’utente ha scelto di visualizzare questi grafici, i segnali giungono al sottoblocco Input Graphs per la memorizzazione.
8 – Le uscite del simulatore
Figura 8.9: Input Output
Input Graphs
Ingressi: ASteer, TAcc, TBrak, ZSoil Uscite: ASteer, TAcc, TBrak, ZSoil
Per completezza viene mostrato anche quest’ultimo blocco, che salva su Workspace i segnali di ingresso al modello.
8 – Le uscite del simulatore
8.2
Dyna
Ingressi: DWRoll, DWPitch, DWYaw, DWPosX, DWPosY, DWPosZ, DWTetaXX, DWRotXX, DWDeltaFX, DWCambXX, DWSpeedX, DWFxTyreXX, DWFyTyreXX, DWFzTyreXX
Uscite:
-Si tratta del blocco di comunicazione del modello -Simulink con Dyna-Worlds.
Come si pu`o vedere in Figura 8.11, tutti i segnali calcolati nelle varie po-sizioni del modello significativi per la visualizzazione grafica sono raccolti a questo livello per l’invio al simulatore grafico, e ciascuna variabile `e contras-segnata da un numero che la identifica all’interno di esso. Alcuni dei segnali in ingresso vengono elaborati prima dell’invio.
La SpeedX, ad esempio, viene saturata a 0 quando `e negativa, per evitare malfunzionamenti nel tachimetro; inoltre, il suo valore `e convertito da m/s in km/h per la visualizzazione su tale strumento.
Le forze di contatto pneumatico–suolo, invece, vengono scalate secondo un fattore di 1/5000 per ottenere vettori di lunghezza accettabile rispetto alle dimensioni del veicolo. Inoltre, il loro valore viene forzato a 0 quando il modulo della SpeedX `e inferiore a 0.15 m/s, soglia per le basse velocit`a che verr`a utilizzata spesso in seguito. Simulando a velocit`a prossime allo zero, si generano forze longitudinali e laterali a carattere impulsivo sulle quattro ruote, che provocano movimenti impercettibili del veicolo2 ma disturbano la
grafica; pertanto si `e scelto di non visualizzarle.
A questo punto viene creata, mediante un operatore Mux, un’unica variabile contenente 34 segnali. Nell’ordine:
Clock - [1 ] Orologio della simulazione;
Roll, Pitch, Yaw - [2, 3, 4 ] Angoli di Eulero della scocca;
PosX, PosY, PosZ - [5, 6, 7 ] Posizione del baricentro della scocca;
TetaXX - [8, 11, 14, 16 ] Angolo descritto dal braccetto inferiore della sospensione XX rispetto al piano della scocca;
2Sono principalmente forze laterali aventi modulo uguale ma segno opposto su ruote dello stesso asse.
8 – Le uscite del simulatore
8 – Le uscite del simulatore
RotXX - [9, 12, 15, 17 ] Angolo di rotazione del pneumatico XX attorno al proprio asse;
DeltaFX - [10, 13 ] Angolo di inclinazione del pneumatico FX rispetto all’asse longitudinale della scocca;
CambXX - [18, 19, 20, 21 ] Angolo di camber del pneumatico XX;
SpeedX - [22 ] Velocit`a di avanzamento del veicolo;
FxTyreXX - [23, 25, 27, 29 ] Forza longitudinale generata dal contatto del pneumatico XX con il suolo (per la visualizzazione dei vettori longitudinali);
FyTyreXX - [24, 26, 28, 30 ] Forza laterale generata dal contatto del pneu-matico XX con il suolo (per la visualizzazione dei vettori laterali);
FzTyreXX - [31, 32, 33, 34 ] Forza verticale generata dal contatto del pneumatico XX con il suolo (per la visualizzazione dei vettori verticali). Il segnale cos`ı ottenuto viene quindi inviato al blocco To DynaWorlds Shared Memory3, che realizza l’interfacciamento mediante memoria
condi-visa. I parametri da impostare nella maschera sono il tempo di campiona-mento e il nome della variabile attraverso cui si inviano i dati. Per comodit`a viene utilizzata la stringa ‘Ferrari’ nella simulazione di tutti i veicoli.
Nel caso si disponga di due PC, `e possibile collegarli mediante cavo incrociato per eseguire il modello Simulink su uno di essi, lasciando all’altro il compito di visualizzare la grafica. In questo caso, al blocco To DynaWorlds Shared Memory dev’essere sostituito il blocco To DynaWorlds UDP/IP conte-nuto nel file UDPIPBlock.mdl. Nella maschera bisogna inserire, oltre al tempo di campionamento, l’indirizzo IP del PC su cui viene eseguito Dyna-Worlds e il numero della porta sulla quale si effettua la comunicazione, gi`a impostato per funzionare con i file F40UDPIP.dwp e JeepUDPIP.dwp. Inoltre `e possibile abilitare il salvataggio in memoria della variabile conte-nente i 34 segnali, attraverso l’esecuzione della funzionalit`a Enable Save Dyna, che porta a 1 il valore di DWSave. La funzionalit`a Save Dyna consente il salvataggio su file dei suddetti dati al termine della simulazione.
8 – Le uscite del simulatore
8.2.1
Save Dyna
Ingressi: DWData Uscite: DWData
Figura 8.12: Save Dyna
A questo livello vengono salvati su disco tutti i dati di una simulazione inviati a DynaWorlds per rendere visualizzabile in grafica il percorso in un secondo momento. Data la quantit`a di memoria necessaria per effettuare il salvataggio, esso ha luogo solo su esplicita attivazione da parte dell’utente.
Parte III
Il blocco CAR
9
Introduzione
Questo blocco determina i movimenti di ogni componente dell’autoveicolo, indotti dalle variabili di ingresso illustrate in precedenza. Si noti che il blocco risulta apparentemente privo di ingressi e di uscite poich´e, per il collegamen-to della CAR con l’esterno (e solo in quescollegamen-to caso), sono state utilizzate delle coppie Goto–From che sostituiscono i fili per non appesantire il modello e la trattazione. Pertanto ciascun ingresso tra quelli descritti nel Capitolo 7 comparir`a come From esclusivamente nei sottoblocchi che ne richiedono la presenza, e verr`a considerato come ingresso solo per quei blocchi. Analoga-mente, le uscite di un sottoblocco sotto forma di Goto saranno uscite della CAR e il loro significato `e gi`a noto in quanto trattato nel Capitolo 8.
Dalla Figura 9.1 si nota chiaramente la separazione fisica e concettuale esistente fra le ruote1 del blocco Wheels e la scocca (Chassis). Un grande
vantaggio di questa netta distinzione `e dato dal fatto che sarebbe possi-bile realizzare un’implementazione completamente diversa per il complesso pneumatico–sospensione, limitandosi poi a collegarla alla scocca in maniera opportuna.
Ruote e scocca, infatti, comunicano fra loro attraverso un numero piuttosto limitato di variabili, creando un anello di relazioni causa–effetto. Semplifican-do un po’ le cose, il principio di base per la messa in moto di un autoveicolo `e infatti il seguente:
• La coppia motrice agisce direttamente sulle ruote motrici, a contatto con il suolo, facendole girare;
1Talvolta con il termine “ruota” verr`a inteso tutto ci`o che `e posizionato ad uno dei quattro angoli della vettura, e in particolare il complesso pneumatico–sospensione.
9 – Introduzione
Figura 9.1: CAR
• il contatto con il suolo genera una forza di attrito, la cui intensit`a dipende anche dal carico esercitato dalla scocca sulla ruota, che tende a opporsi a tale rotazione2;
• quando la coppia generata dalla forza di attrito bilancia quella motrice, la ruota comincia a rotolare mettendosi in movimento traslatorio;
• il moto traslatorio della ruota provoca la messa in moto della scocca;
• il movimento della scocca si ripercuote sulle ruote non motrici, che per l’attrito con il suolo cominciano a rotolare.
Nella realt`a poi bisogna anche tenere conto del fatto che le forze e i momenti generati da pneumatici e sospensioni sono direttamente responsabili
9 – Introduzione
dei movimenti della scocca, e che questi ultimi a loro volta modificano lo stato delle sospensioni, e cos`ı via.
10
Wheels
Ingressi: CGSpeed, Roll, Pitch, YawSpeed, ZLinkXX, ZJointXXSpeed Uscite: ForceXX, MomentXX
Questa sezione descrive il comportamento di quella parte dell’autoveicolo che costituisce il collegamento fra la scocca e il suolo, ovvero il complesso pneumatico–sospensione. Il blocco riceve in ingresso i dati relativi alla po-sizione e alla velocit`a del baricentro della scocca, nonch´e dei suoi punti di contatto con la sospensione stessa.
La Figura 10.1 mostra la struttura dei blocchi che simulano le ruote; tutti e quattro ricevono i dati provenienti dal baricentro, nella parte centrale dello schema, e inoltre ciascuno riceve le informazioni riguardanti le estremit`a del-la scocca alle quali `e collegato, ovvero i punti L (Link) e J (Joint) in Figura 3.1 di pag. 8. Infine le posizioni dei mozzi delle ruote risultano collegate fra loro dalla simulazione delle barre anti–rollio e del sistema anti–beccheggio, come descritto in Tabella 10.1.
Wheel Anti-roll Anti-pitch
FL FR RL
FR FL RR
RL RR FL
RR RL FR
Tabella 10.1: Anti–rollio e anti–beccheggio: collegamenti fra le ruote
10 – Wheels
Figura 10.1: Wheels
strutture molto simili fra loro1. L’asse posteriore `e di pi`u facile
implementa-zione, in quanto privo della maggior parte degli angoli caratteristici: sterzo
1Le uniche differenze riguardano infatti i segni degli angoli caratteristici: per simmetria e per la convenzione scelta essi risultano infatti uguali in modulo (a riposo) ma di segno opposto rispetto agli assi y e z .
10 – Wheels
e convergenza per quanto riguarda i pneumatici e caster per le sospensioni. Pertanto si `e scelto di descrivere nel dettaglio i blocchi che simulano il moto della sola ruota anteriore destra, limitandosi a fare qualche confronto con la posteriore corrispondente o con l’anteriore sinistra nel caso sia interessante evidenziare le differenze.
10.1
Front Right Wheel
Ingressi: CGSpeed, ZHubFL, ZHubRR, YawSpeed, ZLink, ZJointSpeed, Roll, Pitch
Uscite: Force, Moment
La ruota anteriore destra, mostrata in Figura 10.2, contiene i blocchi che calcolano la forza totale e il momento totale agenti sul baricentro del veicolo. Il risultato `e ottenuto elaborando gli ingressi al modello e i dati prove-nienti dalla scocca per determinare le forze nei sistemi di riferimento ZF e SF del pneumatico e della sospensione, che vengono poi proiettate sulla ter-na BF.
Una volta calcolate, esse vengono sommate per determinare la forza totale generata
Fx = FxT yre+ FxSusp,
Fy = FyT yre+ FySusp,
Fz = FzSusp.
(10.1)
Nel calcolo non viene considerata la FT yre
z , poich´e il suo valore `e compreso
gi`a all’interno della FSusp
z , essendo la sospensione collegata alla scocca nel
punto J.
A partire dalle forze e dai bracci vengono quindi calcolati i momenti esercita-ti sulla scocca, anch’essi sommaesercita-ti per avere il momento totale nella terna BF
Mx = MxT yre+ MxSusp,
My = MyT yre+ MySusp,
Mz = MzT yre+ MzSusp.
(10.2)
Si noti che a questo livello `e stata eliminata ove possibile la sigla FR, inutile e ripetitiva poich´e vengono trattate quasi esclusivamente grandezze relative