Indice
1 Introduzione 4
1.1 Introduzione . . . 4
1.2 Principi dei metodi gradiometrici gravitazionali . . . 5
1.2.1 Misura dell’accelerazione di gravit`a . . . 5
1.2.2 Misura del gradiente della gravit`a . . . 7
1.3 Qualche gradiometro in commercio . . . 8
1.4 Introduzione al gradiometro gravitazionale progettato . . . 9
1.5 Descrizione dello strumento . . . 11
1.5.1 Apparato meccanico . . . 11
1.5.2 Sensore di posizione . . . 13
1.5.3 Sistema di lettura a microonde . . . 14
2 Apparato meccanico 16 2.1 Pendolo di torsione . . . 16
2.1.1 Equazione del moto . . . 16
2.1.2 Calcolo della costante elastica di torsione kt . . . 18
2.2 Materiali e progettazione . . . 19
2.2.1 Introduzione . . . 19
2.2.2 Pendolo . . . 19
2.2.3 Dischi e sostegni . . . 21
2.2.4 Distanziale . . . 21
2.2.5 Base e scatola esterna . . . 21
2.3 Calcolo approssimato della frequenza di risonanza . . . 22
2.3.1 Calcolo del momento di inerzia e della costante elastica 22 2.4 Calcolo accurato del momento di inerzia . . . 23
2.4.1 Disco di zaffiro . . . 23
2.4.2 Sostegno del disco . . . 24
2.4.3 Massa aggiuntiva . . . 24
2.4.4 Braccio di silicio . . . 24
2.4.5 Braccio a cui `e collegato il contrappeso . . . 24
2.4.6 Massa contrappeso . . . 24 1
INDICE 2
2.4.7 Considerazioni . . . 25
2.5 Correzione elettrostatica di kt . . . 25
3 Risuonatori in zaffiro 27 3.1 Cavit`a risonante . . . 27
3.1.1 Fattore di merito di una cavit`a risonante . . . 27
3.1.2 Cavit`a Whispering Gallery . . . 29
3.1.3 Calcolo delle frequenze di risonanza per un risuonatore cilindrico W.G. . . 30
3.2 Prove sperimentali sui risuonatori . . . 31
3.2.1 Risuonatore in allumina . . . 31
3.2.2 Risuonatori in zaffiro . . . 35
3.3 Trasduttore posizione-frequenza . . . 37
3.4 Prove sperimentali sui trasduttori . . . 38
3.4.1 Trasduttore in allumina . . . 38
3.4.2 Trasduttore in zaffiro . . . 39
3.4.3 Scelta della risonanza e variazione della larghezza della curva . . . 41
4 Circuito interferometrico 55 4.1 Introduzione . . . 55
4.2 Cavit`a a microonde come elemento circuitale . . . 57
4.2.1 Cavit`a risonante con una sonda di accoppiamento . . . 57
4.2.2 Cavit`a risonante con due sonde di accoppiamento . . . 61
4.3 Configurazione non interferometrica . . . 62
4.3.1 Circuito non interferometrico . . . 62
4.4 Prove sperimentali sul circuito non interferometrico . . . 63
4.4.1 Misura del rumore di posizione con i dischi uniti . . . . 63
4.4.2 Misura del rumore di posizione con i dischi separati . . 67
4.5 Configurazione interferometrica . . . 69
5 Conclusioni 75 5.1 Meccanica . . . 75
5.2 Sensore di posizione . . . 76
5.3 Sistema di lettura a microonde . . . 76
A Dettagli del calcolo del gradiente di gravit`a 78 B Dettagli del calcolo delle risonanze 82 B.1 Equazioni per i campi . . . 82
INDICE 3
B.3 Condizioni al contorno . . . 86
B.4 Guide dielettriche . . . 86
B.5 Risuonatori dielettrici . . . 88
B.5.1 Materiale anisotropico: zaffiro . . . 90
B.5.2 Trasduttore posizione-frequenza . . . 91
Capitolo 1
Introduzione ai gradiometri
gravitazionali e presentazione
del progetto
1.1
Introduzione
Un metodo di indagine geofisica assai potente `e la misura del campo gravi-tazionale generato da una distribuzione di massa o delle variazioni rispetto al suo valore medio. Il potenziale gravitazionale `e dato da:
ϕ(~r) =X
i
G mi
|~r − ~ri|
(1.1) dove G `e la costante di gravitazione universale, mi `e l’i-esimo elemento della
distribuzone di massa e ~ri `e la sua posizione. Il gradiente del potenziale
gravitazionale `e il vettore accelerazione di gravit`a, definito come: ~g = −∇ϕ = −µ ∂ϕ∂x,∂ϕ ∂y, ∂ϕ ∂z ¶ , (1.2)
il cui gradiente `e il tensore:
Γij(~r) = −∂ij2ϕ(~r) i, j = x, y, z (1.3)
CAPITOLO 1. INTRODUZIONE 5 Γij(~r) `e un tensore simmetrico a traccia nulla con 9 componenti, di cui solo
5 sono indipendenti: Γij(~r) = ∂~g ∂~r = ∂gx ∂rx ∂gx ∂ry ∂gx ∂rz ∂gy ∂rx ∂gy ∂ry ∂az ∂ry ∂gz ∂rx ∂gz ∂ry ∂gz ∂rz (1.4)
e misura la variazione dell’accelerazione di gravit`a da un punto ad un altro. Poich´e una variazione di densit`a nel manto roccioso genera una variazione nella distribuzione di massa, e quindi nel campo gravitazionale, queste in-dicazioni sono utili sia per la ricerca mineraria e di idrocarburi, sia per lo studio delle strutture geologiche presenti nel sottosouolo.
Infatti il valore medio dell’accelerazione di gravit`a sulla superficie terrestre, alle nostre latitudini, `e 9.805 m/s2, in realt`a essa varia da un punto ad un
altro dato che la distribuzione di massa della superficie terrestre non `e omo-genea. L’estrema variet`a dei materiali che si possono trovare nel sottosuolo terrestre implica che la massa in ogni punto sia funzione della composizione rocciosa del sottosuolo. Questo legame permette, con opportuni strumenti, di poter individuare depositi rocciosi con diversa densit`a rispetto alle rocce circostanti, o individuare un vuoto (per esempio un giacimento di gas o ca-vit`a sotterranee), di quantificare l’effetto sul campo gravitazionale terrestre dovuto alla presenza di catene montuose o, ancora, di monitorare la risalita del magma lungo i condotti vulcanici.
1.2
Principi dei metodi gradiometrici
gravi-tazionali
1.2.1
Misura dell’accelerazione di gravit`
a
L’accelerazione di gravit`a subisce variazioni locali e temporali dell’ordine di 10−6 intorno al suo valore medio locale.
Questo significa che, per determinare le caratteristiche del sottosuolo, o in-dividuare vuoti sotto la superficie terrestre, o misurare le anomalie di ~g,
CAPITOLO 1. INTRODUZIONE 6 occorrono strumenti in grado di misurare variazioni pi`u piccole di un milione di volte del valor medio dell’accelerazione di gravit`a.
Un’unit`a di misura usata ancora spesso in gravimetria `e il Gal, che cor-risponde a 1 cm/s2. Per misurare l’accelerazione di gravit`a locale, esistono
strumenti detti gravimetri, che devono effettuare questa misura con un’in-certezza dell’ordine del µGal.
In figura (1.1) `e visualizzato il principio di funzionamento di un gravimetro ideale: una massa di prova nota `e sospesa ad una molla di costante ela-stica anch’essa nota, una variazione nell’accelerazione di gravit`a provoca un cambiamento della forza peso a cui `e sottoposta la massa, con conseguente spostamento della posizione di equilibrio del sistema. In definitiva la misura
Proof Mass
d
F
Figura 1.1: Principio di funzionamento di un gravimetro.
di ~g `e basata sulla misura della variazione di lunghezza della molla. Esistono anche altri tipi di gravimetri, detti assoluti, basati su altri principi fisici dovu-ti alla forza di gravit`a, come per esempio la caduta dei gravi.
I gravimetri risultano poco indicati per l’uso su mezzi in movimento, poich´e non riescono a distinguere se l’effetto (di per s`e gi`a di difficile osservazione per la piccola entit`a della variazione della forza in gioco) `e dovuto all’acce-lerazione di gravit`a, o all’acceall’acce-lerazione dovuta al movimento dello strumento stesso.
CAPITOLO 1. INTRODUZIONE 7
1.2.2
Misura del gradiente della gravit`
a
Per misurare la variazione dell’accelerazione di gravit`a da un punto ad un altro, cio`e il gradiente, si usa uno strumento chiamato gradiometro gravime-trico.
Un gradiente di gravit`a indica una variazione della gravit`a che pu`o essere causata da un cambiamento di tipologia o di quantit`a del materiale sotto la superficie terrestre.
Nelle misure gradiometriche spesso l’unit`a di misura utilizzata `e l’E ¨otvos, che equivale a 10−9 s−2, cio`e corrisponde ad una variazione dell’accelerazione
di gravit`a di 10−9 m/s2 su una distanza di un metro.
L’implementazione base di un gradiometro consiste in uno strumento con due accelerometri identici separati da un raggio vettore ri, ciascuno dei quali
misura il valore gz della gravit`a e quindi si riesce a ricavare il valore della
com-ponente Γiz del tensore gradiente di gravit`a, come mostrato in figura (1.2).
Un gradiometro pu`o essere usato su un veicolo in movimento, purch`e viaggi
Figura 1.2: Principio di funzionamento di un gradiometro.
in linea retta. Questo `e possibile poich´e il gradiometro utilizza due sensori gravimetrici per misurare la forza del campo di gravit`a, quindi la misura non `e pi`u locale, come quella effettuata con un gravimetro. L’uso di due gravimetri identici permette di cancellare le accelerazioni comuni dovute alle vibrazioni del veicolo, dato che le due masse sentono la stessa accelerazione. Il movimento in linea retta `e necessario poich´e le accelerazioni angolari causate
CAPITOLO 1. INTRODUZIONE 8 da rotazioni del veicolo hanno impatto diverso su ciascuna massa e causano gli stessi problemi che si hanno con il gravimetro, come si deduce dai conti riportati in appendice A [9]. Nonostante questo, il gradiometro rimane uno strumento migliore per le misure in movimento.
1.3
Qualche gradiometro in commercio
Ad oggi sono stati sviluppati pochi modelli di gradiometro. I dispositivi costruiti per l’utilizzo nello spazio, ad esempio, sono sensibili a livelli di rumore intorno ai 10−3 − 10−4 E ¨o. Ci`o `e possibile poich´e le bassissime
ac-celerazioni satellitari generano un rumore ambientale minimo, almeno un milionesimo di quello generato da un velivolo. Alcuni esempi sono l’ac-celerometro differenziale superconduttore a sei assi, progettato dal gruppo di Ho Jung Paik, dell’Universit`a del Maryland ([2], [3]), e costruito dalla Oxford Instruments, e l’accelerometro per la missione GOCE [4].
Strumenti per il solo utilizzo in laboratorio sono stati costruiti anche dupli-cando il nucleo sensore di gravimetri assoluti, come il dispositivo supercon-duttore a levitazione della GWR Inc. [5], l’interferomero Michelson a caduta libera della Micro-g Solutions Inc. [6] e l’interferometro atomico sviluppato dal gruppo di Kasevich all’Universit`a di Yale [7].
Tutti questi strumenti vantano una risoluzione da 0.1 a 1 E ¨o con un’acqui-sizione al secondo, anche se sono lontani dall’essere facilmente trasportabili e utilizzati sul campo.
Il pi`u famoso strumento portatile `e il Gravity Gradiometer Instrument (GGI), realizzato in principio dalla Lockheed Martin per applicazioni militari ma recentemente declassificato e ora presentato sul mercato civile [8]. Questo strumento `e specificatamente disegnato per essere montato su aerei o navi, e consiste di due paia di accelerometri a bilanciamento di forza accoppiati e montati ortogonali su una piattaforma rotante.
Il segnale utile viene estratto attraverso una opportuna combinazione della differenza dei segnali ottenuti da ciascun accelerometro. Con questo stru-mento si ottiene una sensibilit`a intorno ai 5 E ¨o.
CAPITOLO 1. INTRODUZIONE 9 strumento che misura comtemporaneamente tutte le componenti del tensore gradiente, permettendo una ricostruzione completa della mappa della gra-vit`a. Le prestazioni di questo gradiometro sono molto alte, anche se tuttavia rimane uno strumento molto costoso e voluminoso.
Attualmente lo strumento portatile pi`u promettente sembra essere il gra-diometro mobile superconduttore sviluppato da F.van Kann alla Western Australia University [11]. Specificatamente disegnato per analisi aeree, ha una risoluzione migliore di 1 E ¨o anche in presenza di accelerazioni lineari di 1 m/s2. Comunque anche in questo caso, la dimensione della piattaforma
e del sistema ad elio liquido per il raffreddamento lo rendono assai poco trasportabile.
1.4
Introduzione al gradiometro gravitazionale
progettato
Come si `e visto nelle precedenti sezioni, la componente Γiz del tensore
gra-diente di gravit`a pu`o essere ricavata misurando il valore dell’accelerazione di gravit`a gz in due punti separati da un raggio vettore ri noto, utilizzando due
accelerometri identici.
Ciascun accelerometro `e un trasduttore1 accelerazione-posizione, in cui la
posizione di una massa di prova `e linearmente dipendente dalla sua ac-celerazione. In generale, un oscillatore armonico `e un buon accelerometro per frequenze ω ¿ ω0, dove ω0 `e la frequenza di risonanza dell’accelerometro.
In questo caso, nel dominio delle frequenze si ha: z(ω) ≈ a(ω)ω2
0
(1.5) dove z(ω) `e la posizione della massa di prova e a(ω) `e la sua accelerazione. Per ω0 piccoli si vede che la sensibilit`a dell’accelerometro aumenta, anche se
la banda di risposta diminuisce.
Nel caso di due accelerometri identici, in cui la differenza di accelerazione tra
1Un trasduttore `e un qualunque dispositivo in grado di trasformare in modo lineare
CAPITOLO 1. INTRODUZIONE 10 le masse di prova sia dovuta solo al gradiente di gravit`a, si pu`o scrivere:
Γiz(ω) =
(z1(ω) − z2(ω))ω02
ri
(1.6)
In tale ipotesi, un eventuale rumore cinematico, dovuto alla presenza di un’accelerazione traslazionale, `e visto come “modo comune” tra i due ac-celerometri, quindi non contribuisce al segnale differenza rilevato.
Se, invece, i due accelerometri non sono identici, cio`e hanno frequenze di risonanza differenti (δω0 = ω01− ω02 6= 0), anche l’accelerazione comune alle
due masse contribuisce al rumore del segnale. Nell’approssimazione di masse puntiformi, scrivendo le equazioni del moto per le masse di prova di entrambi gli accelerometri si ottiene:
z1(ω) − z2(ω) ≈ riΓiz(ω) ω2 0 + 2µ δω0 ω0 ¶ (gz + az(ω)) ω2 0 (1.7) Il fattore ³2δω0 ω0 ´−1
`e detto Common-Mode-Rejection-Ratio (CMRR); pi`u grande `e il CMRR e maggiore `e l’accelerazione comune alla quale il gra-diometro pu`o essere sottoposto, senza che la misura di Γiz sia perturbata.
Con questo lavoro di tesi si vuole studiare la realizzazione di un gradiometro gravitazionale sensibile alla componente diagonale Γzz = ∂gz/∂z del tensore
gradiente di gravit`a. L’obiettivo sar`a di raggiungere risoluzioni a livello di 10 E¨o su un tempo di acquisizione di 1 secondo. A differenza dei gradiometri gravitazionali presenti in commercio, il nostro strumento sar`a caratterizzato da peso e dimensioni ridotte, dell’ordine rispettivamente del chilogrammo e del decimetro cubo. Tali caratteristiche rendono questo gradiometro adatto all’utilizzo non solo su navi o aerei, ma su qualunque mezzo di trasporto. Il gradiometro progettato consiste in due accelerometri identici, sensibili al-l’accelerazione lungo l’asse z, posti verticalmente l’uno sull’altro ad una di-stanza fissa rz. Il segnale utile per la misura del gradiente di gravit`a viene
estratto come differenza dei segnali in uscita da ciascun accelerometro, che fa da trasduttore posizione-frequenza, tramite un sistema di lettura interfe-rometrico a microonde. Lo strumento sar`a descritto qualitativamente nelle
CAPITOLO 1. INTRODUZIONE 11 sezioni seguenti, mentre nei capitoli 2, 3, e 4 verranno analizzate e studiate approfonditamente tutte le sue componenti.
1.5
Descrizione dello strumento
1.5.1
Apparato meccanico
L’apparato meccanico del gradiometro consiste in due sensori accelerometri-ci identiaccelerometri-ci, posti verticalmente uno sull’altro ad una distanza fissa dell’or-dine di 15 cm. Questa separazione `e data da elementi spaziatori costruiti in monoblocchi di quarzo fuso per minimizzare gli effetti termici, cio`e evitare le variazioni di rz, che si ripercuoterebbero sulla misura. La scelta di ogni
materiale e le rispettive caratteristiche saranno discusse pi`u in dettaglio nel capitolo seguente.
Con questa geometria lo strumento `e sensibile alla componente Γzz del
ten-sore gradiente di gravit`a. Il singolo accelerometro `e mostrato in fig. (1.3) e fig. (1.4).
Figura 1.3: Spaccato longitudinale dell’accelerometro.
Una leva mobile `e scavata in una lastra di silicio cristallino, con una fresa ad ultrasuoni. Questo tipo di lavorazione risulta esente da stress termici e con-sente l’incisione in materiali duri, di profili anche complessi, con precisione micrometrica. L’uso di un blocco unico per la costruzione della leva mobile, senza giunzioni e incollaggi, garantisce la massima stabilit`a della struttura nel tempo ed alti fattori di qualit`a meccanici, inoltre ne rende perfettamente riproducibili le caratteristiche e le propriet`a .
Un’estremit`a della leva `e ancorata alla struttura fissa mediante due sottili barrette di torsione, mentre sull’altra, in posizione verticale, viene fissato
CAPITOLO 1. INTRODUZIONE 12
Figura 1.4: Piastra superiore dell’accelerometro vista dall’alto. con un incollaggio di precisione un cilindro al cui altro estremo `e incollato un disco di zaffiro. Un secondo disco, identico, viene fissato in modo soli-dale alla superficie inferiore dell’accelerometro. La distanza tra i due dischi `e regolata in modo tale che, per valori standard di g, risulti di 100 µm. La struttura mobile funziona come pendolo di torsione: applicando una forza Fz
al primo disco, viene prodotta una torsione Θ del pendolo, il quale si flette, modificando la distanza tra i dischi.
Per procedere alla correzione delle inevitabili imprecisioni di lavorazione e di assemblaggio, che portano a non avere due accelerometri identici, saranno necessari alcuni accorgimenti. Per bilanciare la frequenza meccanica d’oscil-lazione, in primo luogo si interverr`a sul momento d’inerzia del braccio mo-bile tramite l’aggiunta di micropesi, in secondo luogo si potr`a eseguire una correzione fina sulla costante elastica con metodi elettrostatici, come verr`a illustrato nel capitolo 3. Inoltre, per evitare oscillazioni dell’accelerometro troppo ampie alla frequenza di risonanza ω0, sar`a necessario smorzare il moto
di oscillazione del braccio, senza ridurre il coefficiente di merito meccanico. A tale scopo verr`a usato il metodo dello smorzamento attivo, collaudato sul-l’interferometro gravitazionale di VIRGO [14].
Poich´e oscillazioni dei dischi di ampiezza troppo grande potrebbero rompere le sottili barrette di torsione, `e indispensabile bloccare il movimento del brac-cio quando il sensore non `e in funzione. Questo pu`o essere fatto tramite un sistema che attivi forze di richiamo elevate, che entri in azione in caso di scostamenti dalla posizione di lavoro superiori a qualche µm .
CAPITOLO 1. INTRODUZIONE 13
1.5.2
Sensore di posizione
La misura delle variazioni di posizione z1 − z2 delle masse di ciascun
ac-celerometro richiede apparati particolarmente sensibili. Nel nostro progetto, il moto di ciascuna massa di prova `e rivelato da un trasduttore posizione-frequenza, che pu`o essere schematizzato come una coppia di dischi coassiali di cui uno mobile e uno fisso, come mostrato in figura (1.5).
Figura 1.5: struttura del trasduttore posizione-frequenza.
Il sensore, cos`i strutturato, `e una cavit`a che risuona nei modi Whispering Gallery (W.G.) del campo elettromagnetico (E.M.), la cui frequenza di riso-nanza dipende dalla distanza tra i due dischi. Tali modi sono generati dalla riflessione totale del campo E.M. sulla superficie esterna del disco dielettrico e verranno discussi nel capitolo 4.
L’efficienza di un trasduttore posizione-frequenza dipende dal prodotto Qf ·∂f∂z, dove f `e la frequenza della risonanza, Q `e il fattore di qualit`a della risonanza e ∂f /∂z `e la variazione della frequenza di risonanza al variare della posizione relativa dei due dischi. Quest’ultimo termine `e detto coefficiente di accor-dabilit`a e determina la sensibilit`a allo spostamento del trasduttore stesso. Maggiore `e il prodotto Qf · ∂f∂z e maggiore `e la sensibilit`a del trasduttore, infatti se ∂f /∂z `e grande, a piccoli spostamenti corrispondono grandi va-riazioni di frequenza, facilmente misurabili. Inoltre maggiore `e Q, maggiore `e la precisione con cui `e possibile misurare la frequenza e quindi la posizione. I modi Whispering Gallery hanno il vantaggio di presentare sia alti Q che
CAPITOLO 1. INTRODUZIONE 14 alti ∂f /∂z.
Nel nostro progetto, ciascun risuonatore `e formato dalla massa di prova di un accelerometro e dal rispettivo disco fissato alla struttura portante.
1.5.3
Sistema di lettura a microonde
Il segnale utile per la misura del gradiente di gravit`a viene estratto misurando direttamente la differenza di posizione delle masse di prova dei due trasdut-tori, tramite un sistema di lettura interferometrico a microonde. Questo sistema `e stato progettato seguendo lo schema del circuito interferometrico differenziale studiato da Blair et al. [16], mostrato in figura (1.6). Il
vantag-Figura 1.6: Schema del circuito interferometrico.
gio nell’uso della configurazione interferometrica `e quello di ridurre l’effetto del rumore di fase della sorgente a microonde sulla misura, il quale, spesso, `e un limite alla sensibilit`a dello strumento.
In questa sezione il circuito verr`a solo descritto, mentre nel capitolo 5 verr`a analizzato in ogni sua parte.
CAPITOLO 1. INTRODUZIONE 15 Come si vede dallo schema del circuito, vengono utilizzati due risuonatori di zaffiro e l’accelerazione differenziale viene rivelata misurando la differenza delle loro frequenze di risonanza.
Uno dei due risuonatori viene usato due volte: prima in un circuito oscil-latore, per generare un segnale a microonde la cui frequenza dipende dalla frequenza di risonanza del risuonatore stesso, poi in uno dei due rami del circuito interferometrico. Un power divider divide la potenza del segnale in uscita dal circuito oscillatore e la invia ai due trasduttori usati in riflessione tramite due circolatori. La potenza trasmessa dai circolatori su ciascun ramo viene ricombinata con un power combiner. Inserendo una fase di π tra i due rami del circuito, al mixer arriva un segnale proporzionale alla differenza dei segnali riflessi dalle due cavit`a. Questo segnale viene misurato in maniera coerente tramite il mixer, pilotato dal circuito oscillatore. L’uscita del mixer `e un segnale che, una volta fissato il punto di lavoro opportuno, `e proporzionale alla differenza di fase dei segnali riflessi dai due trasduttori, dalla quale si pu`o risalire alla differenza di posizione dei dischi dei risuonatori.
Capitolo 2
Apparato meccanico
2.1
Pendolo di torsione
2.1.1
Equazione del moto
Ogni accelerometro `e costituito da un pendolo di torsione descritto dalla seguente equazione:
I ¨θ + ηt˙θ + ktθ = M (2.1)
dove I `e il momento di inerzia del pendolo, ηt `e il coefficiente di viscosit`a,
kt `e la costante elastica di torsione e M `e il momento delle forze agenti sul
pendolo.
Se i due pendoli di torsione sono identici, quindi hanno stessa costante elastica di torsione kt e momento di inerzia I, e la differenza di accelerazione tra le
masse `e dovuta solo al gradiente di gravit`a Γzz, si pu`o scrivere, per entrambe
le masse di prova:
I ¨θ1 + ηtθ˙1+ ktθ1 = mgz1d (2.2)
I ¨θ2 + ηtθ˙2+ ktθ2 = mgz2d (2.3)
dove d `e la distanza tra il centro di massa e l’asse di rotazione. Nel dominio delle frequenze, per ω ¿ ω0, con ω02 = kIt si ha:
CAPITOLO 2. APPARATO MECCANICO 17 ω2 0θ1(ω) = md I gz1(ω) (2.4) ω02θ2(ω) = md I gz2(ω) (2.5)
Nell’approssimazione di θ piccoli si pu`o porre θ = z/d e si ottiene: ω2
0(z1(ω) − z2(ω)) =
md2
I (gz1(ω) − gz2(ω)) (2.6) Considerando la massa puntiforme, quindi I = md2, si ottiene, come
antici-pato nel precedente capitolo: Γzz(ω) =
(z1(ω) − z2(ω))ω02
rz
(2.7) dove rz `e la distanza tra i due punti in cui si esegue la misura. Nel caso i due
accelerometri non siano identici (δω0 = ω01− ω02 6= 0), bisogna considerare
anche l’accelerazione comune alle due masse az.
Le equazioni che descrivono il moto del pendolo diventano:
I1θ¨1+ ηt1θ˙1+ kt1θ1 = m1(gz1+ az)d1 (2.8)
I2θ¨2+ ηt2θ˙2+ kt2θ2 = m2(gz2+ az)d2 (2.9)
Passando al dominio delle frequenze: θ1(ω) = m1d1 I1 (gz1(ω) + az(ω)) −ω2+ iωω01 Q1 + ω 2 01 (2.10) θ2(ω) = m2d2 I2 (gz2(ω) + az(ω)) −ω2+ iωω02 Q2 + ω 2 02 (2.11) dove Q = ω0I/ηt. Considerando anche qui θ = z/d e la massa puntiforme si
ottiene: z1(ω) = (gz1(ω) + az(ω)) −ω2+ iωω01 Q1 + ω 2 01 (2.12) z2(ω) = (gz2(ω) + az(ω)) −ω2+ iωω02 Q2 + ω 2 02 (2.13)
CAPITOLO 2. APPARATO MECCANICO 18 da cui, per ω ¿ ω01, ω02, si ricava, per la posizione delle masse di prova:
z1(ω) − z2(ω) ≈ rzΓzz(ω) ω2 0 + 2µ δω0 ω0 ¶ (gz+ az(ω)) ω2 0 (2.14) Se le due masse non si considerano puntiformi, la sensibilit`a non `e pi`u de-terminata dalla frequenza di risonanza ma dal rapporto tra il momento della forza peso e la costante elastica di torsione.
2.1.2
Calcolo della costante elastica di torsione
kt
La costante elastica di torsione dei due bracci del pendolo pu`o essere calcolata a partire dalla generica equazione che definisce il momento di torsione Mt di
una barretta a sezione rettangolare [17]: Mt= ktθ = G
(2a)3(2b)k 1
l θ (2.15)
dove G 1 `e il modulo di rigidit`a del materiale con cui `e costruito il
pendo-lo, θ `e l’angolo di torsione, l `e la lunghezza della sbarretta, 2a e 2b sono rispettivamente la larghezza e la profondit`a della sezione e k1 `e una costante
numerica che dipende dal rapporto b/a. I valori di k1 sono tabulati, se ne
riportano alcuni in tabella (2.1).
b/a k1 1.0 0.1406 1.5 0.196 2.0 0.229 5.0 0.291 10.0 0.312 ∞ 0.333
Tabella 2.1: Valori assunti da k1 al variare del rapporto b/a [17].
Noto il momento di inerzia I, una volta ottenuta la costante di torsione, che `e la somma delle costanti di ciascun braccio, si pu`o ricavare la frequenza di
1G = E
CAPITOLO 2. APPARATO MECCANICO 19 risonanza dell’accelerometro, che risulta essere:
f0 = 1 2π r kt I (2.16)
2.2
Materiali e progettazione
2.2.1
Introduzione
In questa sezione verranno considerate le singole parti che compongono il gradiometro. Di ciascuna verranno analizzate le caratteristiche, al fine di scegliere i materiali pi`u idonei con cui costruirle.
Il gradiometro pu`o essere diviso in due parti principali: i due accelerometri, che devono essere identici, e il distanziale tra i due. Il singolo accelerometro, mostrato in figura (2.1), `e a sua volta composto da diverse parti.
Figura 2.1: Visione frontale dell’accelerometro.
2.2.2
Pendolo
Il pendolo di torsione verr`a ricavato incidendone il profilo, mostrato in figu-ra (2.2), in una lastfigu-ra di dimensioni circa 90 × 130 × 4 mm.
Il pendolo dovr`a avere una bassa costante elastica di torsione, per garantire una maggiore sensibilit`a e dovr`a avere alti fattori di qualit`a meccanici Q. Poich´e kt dipende dal modulo di rigidit`a G come segue:
kt= 2 · G
(2a)3(2b)k 1
CAPITOLO 2. APPARATO MECCANICO 20
Figura 2.2: Profilo approssimativo del pendolo di torsione.
`e necessario che il materiale scelto per il pendolo non abbia G troppo elevato. Anche il coefficiente di dilatazione termica lineare del materiale deve essere tale da incidere il meno possibile sulle grandezze in questione.
Dal confronto tra diversi materiali `e stato scelto il silicio monocristallino, di cui alcune caratteristiche sono mostrate in tabella (2.2).
costante silicio
Densit`a [g/cm3] 2.33
Modulo di Young [GPa] 112
Coefficiente di Poisson 0.28
Modulo di rigidit`a [GPa] 43.75
Conducibilit`a termica [W/m·K] 125
Espansione termica lineare [µm/m oC] 2.616
Calore specifico [cal/g oC ] 0.18
Tabella 2.2: Tabella con alcune costanti del silicio [18].
La caratteristica di essere monocristallino garantisce al materiale alti fattori di qualit`a meccanici.
Nel progettare il pendolo di torsione bisogna tenere in considerazione alcune problematiche. La lunghezza della leva, per esempio, va studiata con cura poich´e determina sia il momento della forza peso, sia il momento di inerzia, e quindi la frequenza di oscillazione del pendolo. Anche le dimensioni dei bracci di torsione vanno ad influire sulla frequenza di oscillazione, poich´e determi-nano la costante di torsione, come mostrato nell’equazione (2.17). Inoltre
CAPITOLO 2. APPARATO MECCANICO 21 bisogna studiare con precisione le dimensioni e la posizione del contrappe-so, elemento che permette di correggere la costante elastica kt con metodi
elettrostatici, come sar`a descritto in seguito.
2.2.3
Dischi e sostegni
I dischi sono realizzati in zaffiro, materiale scelto per le sue caratteristiche meccaniche ed elettriche. Lo zaffiro `e la forma cristalina dell’allumina (Al2O3),
ed `e un cristallo uniassico. `E un materiale duro e trasparente, che presenta un basso coefficiente di espansione termica e con una tangente di perdita a microoonde molto bassa, tanto da garantire alle nostre cavit`a risonanti W.G. fattori di qualit`a Q di alcune unit`a in 104 a temperatura ambiente.
I sostegni possono essere realizzati in diversi materiali, ma la scelta `e con-dizionata dal requisito di minimizzare l’effetto della dilatazione termica sulla distanza tra i dischi.
2.2.4
Distanziale
Il distanziale `e un parallelepipedo, la dimensione della base `e la stessa di quella della lastra dove viene inciso il profilo del pendolo, mentre l’altezza deve essere determinata in base a quella scelta per i sostegni dei dischi e in base a quanto i dischi si abbassano sotto la forza peso con g = 9.8 m/s2.
Nel parallelepipedo sar`a scavato un cilindro di diametro circa 80 mm, dove saranno alloggiati i dischi di zaffiro. Le pareti del cilindro saranno rivestite di materiale assorbente alle microonde, per evitare perturbazioni dell’ambiente esterno sul trasduttore.
Il materiale con cui costruire il distanziale va deciso in modo che l’insieme dei dischi, dei sostegni di questi e del distanziale stesso sia compensato termicamente.
2.2.5
Base e scatola esterna
La base non presenta particolari problemi riguardo al materiale con cui es-sere costruita; la scatola esterna invece dovr`a eses-sere di metallo, in modo da
CAPITOLO 2. APPARATO MECCANICO 22 schermare l’apparato, ed a tenuta di vuoto, altrimenti la viscosit dell’aria uc-cide il fattore di qualit`a meccanico. Il vuoto fa aumentare allo stesso tempo l’inerzia termica.
2.3
Calcolo approssimato della frequenza di
risonanza
2.3.1
Calcolo del momento di inerzia e della costante
elastica
Si prende in esame il sistema formato dal pendolo con appeso il disco tramite il sostegno. In prima approssimazione si pu`o considerare la massa del disco pi`u il sostegno come puntiforme, posta ad una distanza br dall’asse di
tor-sione.
Si vuole fare il conto per una massa M di 40 grammi ed un braccio br di 50
mm. Il peso del nostro disco e del sostegno `e di 30.9 grammi, dunque sar`a necessario aumentarne la massa aggiungendo dei pesi.
Il momento di inerzia che si ottiene `e: I = M · b2r = 1.00 × 10
−4
kg · m2 (2.18)
La costante elastica invece `e data dalla (2.17) e scegliendo le dimensioni 2a = 0.8 mm, 2b = 4 mm e l = 15 mm si ricava come valore del rapporto b/a = 5, a cui corrisponde k1 = 0.291. Il modulo di rigidit`a G `e stato
calcolato a partire dai valori di E (112 GPa) e σ (0.28) nella tabella (2.2), da cui G = 43.75 GPa.
Quindi per kt si ottiene il seguente valore:
kt= 3.48 N · m
A questo punto si pu`o ricavare la frequenza di risonanza del pendolo dalla formula (2.16), dove `e espressa in funzione del momento di inerzia e della costante elastica.
CAPITOLO 2. APPARATO MECCANICO 23 Si pu`o anche calcolare di quanto si abbasserebbe il disco di zaffiro sotto l’effetto della forza peso. La forza di gravit`a applica un momento al pendolo di torsione dato da:
M brg = ktθ (2.19)
da cui, considerando g = 9.81 m/s2, si ha:
θ = M brg/kt= 5.64 mrad (2.20)
e quindi il disco si abbassa di:
z = θ · br ∼ 0.3 mm (2.21)
2.4
Calcolo accurato del momento di inerzia
Per avere un calcolo pi`u preciso del momento di inerzia del pendolo, bisogna considerare ogni parte che lo compone, cio`e:
• Disco di zaffiro
• Sostegno del disco di zaffiro • Massa aggiuntiva
• Braccio di silicio a cui `e collegato il disco
• Braccio di silicio a cui `e collegata la massa contrappeso • Massa contrappeso
2.4.1
Disco di zaffiro
Il disco, insieme alla massa aggiuntiva, `e la parte che d`a il contributo prin-cipale al momento di inerzia. Il disco ha un’altezza h = 5.00 mm, raggio r = 21 mm e massa M = 28 g. Il suo centro di massa dista dall’asse di torsione d = p(50)2+ (22.5)2 mm = 55 mm. Il momento di inerzia `e dato
da:
I = 1 12M (3r
2+ h2) + M d2
CAPITOLO 2. APPARATO MECCANICO 24
2.4.2
Sostegno del disco
Il contributo del sostegno del disco al momento di inerzia totale `e minimo. Le dimensioni del sostegno sono h = 20 mm, r = 4 mm e la sua massa `e M = 3 g, se in alluminio, da cui: I = 1 12M (3r 2+ h2) + M d2 = 7.9 · 10−6 kg · m2 (2.23)
2.4.3
Massa aggiuntiva
Per ottenere una massa totale del pendolo di 40 grammi, bisogna aggiungere 9 grammi ad una distanza di 50 mm dall’asse di torsione e il suo contributo al momento di inerzia `e di:
I = 2.25 · 10−5 kg · m2 (2.24)
2.4.4
Braccio di silicio
Questa parte `e un parallelepipedo di lati a = 55 mm, b = 10 mm e c = 4 mm, il cui baricentro dista d = 27.5 mm dall’asse di torsione. La massa `e M = 5.1 g, calcolata tenendo conto che la densit`a del silicio `e 2330 kg/m3.
Il momento di inerzia `e: I = 1
12M (a
2 + c2) + M d2
= 5.2 · 10−6 kg · m2 (2.25)
2.4.5
Braccio a cui `
e collegato il contrappeso
Questo `e un parallelepipedo di lati a = 10 mm, b = 10 mm e c = 4 mm, il cui baricentro dista d = 5 mm dall’asse di torsione. La massa `e M = 0.93 g ed il suo momento di inerzia `e:
I = 1 12M (a
2 + c2) + M d2
= 3.2 · 10−8 kg · m2 (2.26)
2.4.6
Massa contrappeso
Questa parte `e un parallelepipedo di lati a = 10 mm, b = 70 mm e c = 4 mm, il cui baricentro dista d = 15 mm dall’asse di torsione. La massa `e
CAPITOLO 2. APPARATO MECCANICO 25 M = 6.5 g ed il suo momento di inerzia `e:
I = 1 12M (a
2 + c2) + M d2
= 1.5 · 10−6 kg · m2 (2.27)
2.4.7
Considerazioni
Il momento di inerzia totale del pendolo `e la somma dei momenti delle parti che lo compongono, dunque in questo caso si trova
I = 1.24 · 10−4 kg · m2 e la frequenza di risonanza diventa
f0 = 26.7 Hz
2.5
Correzione elettrostatica di
k
tPer avere un alto CMRR meccanico, occorre che le frequenze di risonanza dei due accelerometri siano il pi`u possbile vicine. Questo pu`o essere fatto correggendo la differenza tra le costanti elastiche dei due pendoli.
La costante kt pu`o essere variata applicando una forza proporzionale a θ alla
massa M 2, che fa da contrappeso. Per fare questo la massa M2, opportu-namente metalizzata sulle superfici, `e disposta come elettrodo comune a due capacitori, come mostrato in figura (2.3). Ponendo la piastra di silicio a massa e dando agli altri due elettrodi la stessa alta tensione V, si riesce ad applicare un momento proporzionale a θ.
Il momento applicato dalla forza elettrica `e dato da: Me = −b2 ε0A2V2 2 µ 1 d2 1 − 1 d2 2 ¶ (2.28) dove A2 `e la superficie della massa M2.
Dato che:
d1 = d0− θb2
CAPITOLO 2. APPARATO MECCANICO 26 M1 M2 b1 b2 d1 d2 Q V V
Figura 2.3: Schema in sezione dell’apparato per correggere la costante elastica.
il momento della forza elettrica diventa: Me= 2b2 2ε0A2V2 d3 0 θ (2.29)
Tale risultato equivale a variare la costante elastica kt di una quantit`a pari
a: δkt= 2b2 2ε0A2V2 d3 0 (2.30) Se si sceglie il condensatore rettangolare con dimensioni superficiali di 70 × 10 mm, con il centro ad una distanza d2 = 15 mm dai perni di torsione ed una
di-stanza tra le facce di d0 = 1 mm, dando al massimo una tensione di 1 kV,
si ottiene una correzione massima per kt pari a:
δ(kt)max = 0.0028 N · m Quindi: δ(kt)max kt = 8 · 10 −4 da cui: δ(f0)max f0 = 4 · 10 −4
che esprime la massima differenza di frequenza di risonanza che possono avere i due pendoli, affinch´e la correzione eseguita con questo metodo risulti efficace.
Capitolo 3
Risuonatori in zaffiro
3.1
Cavit`
a risonante
Una cavit`a risonante `e una regione di spazio al cui interno pu`o essere im-magazzinata energia elettromagnetica, cio`e il campo elettromagnetico pu`o essere confinato spazialmente in tutte e tre le dimensioni.
Se invece il campo `e confinato solo lungo due direzioni e si pu`o propagare lungo la terza, si ha una guida d’onda. Il confinamento pu`o essere ottenuto attraverso superfici metalliche o superfici di separazione tra dielettrici. Le frequenze di risonanza di una cavit`a sono discrete, cio`e all’interno della cavit`a sono permessi solo alcuni modi. Il campo all’interno della cavit`a deve rispettare le condizioni al contorno date dal confinamento, gli autovalori e gli autovettori che risolvono il problema sono discreti e rappresentano rispetti-vamente le frequenze di risonanza e i corrispondenti modi.
In questo capitolo verr`a mostrato il modello alla base del calcolo delle frequen-ze di risonanza per i trasduttori e saranno presentate le prove sperimentali eseguite.
3.1.1
Fattore di merito di una cavit`
a risonante
Il fattore di merito di una cavit`a viene definito come: Q = 2π · Energia immagazzinata
P Energie dissipate per ciclo (3.1)
CAPITOLO 3. RISUONATORI IN ZAFFIRO 28
e si pu`o dimostrare che Q = f0/∆f , dove ∆f `e la larghezza a met`a altezza
della curva di risonanaza.
Per calcolare il Q della cavit`a dall’equazione (3.1), quando si considera l’ener-gia dissipata per ciclo, bisogna sommarne i contributi dati da ciascun fattore di perdita. Generalmente le pareti di una cavit`a risonante sono costruite in materiale conduttore. Questo significa che parte dell’energia immagazzinata nella cavit`a si disperde nelle pareti per effetto Joule, dovuto alle correnti di superficie. Ulteriori perdite avvengono se la cavit`a `e riempita di materiale dielettrico e per l’accoppiamento con l’esterno. Quindi si ha:
1 Q = 1 Qj + 1 Qε + 1 Qβ (3.2)
dove Qj `e dovuto alle perdite per effetto Joule, Qε `e dovuto al dielettrico
all’interno della cavit`a e Qβ `e dovuto all’accoppiamento.
L’equazione (3.3) pu`o anche essere scritta come: 1 QL = 1 QU + 1 Qβ (3.3)
dove L `e il suffisso per Loaded e U per Unloaded; QU `e il fattore di merito
proprio della cavit`a, mentre QL considera anche l’accoppiamento.
Il fattore Qε`e dovuto all’assorbimento dell’energia elettromagnetica nel
dielet-trico. La costante dielettrica del materiale di cui `e riempita la cavit`a ha una parte reale ε0 e una parte immaginaria ε00, entrambe funzioni della frequenza:
ε ε0
= ε0 − iε00 (3.4)
L’assorbimento della radiazione nel dielettrico `e dato da un fattore chiamato tangente di perdita o tanδ:
1 Qε
= tanδ = ε 00
ε0 (3.5)
CAPITOLO 3. RISUONATORI IN ZAFFIRO 29 materiale dielettrico, si pu`o avere anche una dispersione di energia per irrag-giamento verso l’esterno. Quindi Q diventa:
1 Q = 1 Qε + 1 Qβ + 1 Qrad (3.6)
Il vantaggio nell’usare una cavit`a di materiale dielettrico nasce dal fatto che, se si utilizza un dielettrico con una tangente di perdita abbastanza bassa, si riescono ad ottenere Q assai elevati, dato che non ci sono perdite di tipo Joule.
3.1.2
Cavit`
a Whispering Gallery
Nel nostro progetto, il moto di ciascuna massa di prova del gradiometro gravitazionale `e rivelato da un trasduttore posizione-frequenza, formato da due dischi coassiali in zaffiro. Il sensore `e una cavit`a a microonde, risonante nei modi Whispering Gallery (W.G.) del campo elettromagnetico, la cui fre-quenza varia con la distanza tra i due dischi. Questi modi sono generati dalla riflessione totale del campo elettromagnetico sulla superficie esterna del dielettrico; il campo all’interno del dielettrico `e concentrato nelle vici-nanze della superficie, mentre `e nullo al centro.
I modi W.G. si suddividono in quasi-TE, (Transverse Electric), caratterizzati dall’avere la componente assiale Ez ≈ 0, le cui componenti sensibilmente
di-verse da zero sono Hz, Eρ, Eϕ, chiamati anche modi H, poich´e hanno Hz 6= 0,
e in quasi-TM (Transverse Magnetic), che hanno Hz ≈ 0, le cui componenti
sensibilmente diverse da zero sono Ez, Hρ, Hϕ, chiamati anche modi E, poich´e
hanno Ez 6= 0.
Ogni modo `e inoltre caratterizzato da tre numeri: m, n e p, che descrivono il numero dei massimi dell’ energia del campo elettromagnetico rispettivamente nella direzione azimutale, radiale e assiale. I modi T Emnp e T Mmnp hanno
2m massimi lungo la direzione azimutale, n lungo la direzione radiale e p lungo quella assiale.
CAPITOLO 3. RISUONATORI IN ZAFFIRO 30
3.1.3
Calcolo delle frequenze di risonanza per un
risuona-tore cilindrico W.G.
Il nostro sistema pu`o essere modellizzato come in figura (3.1), considerando
Figura 3.1: Schematizzazione di un risuonatore dielettrico cilindrico. i risuonatori dielettrici come cilindri di raggio ρ = a e semi-altezza H, con costante elettrica ε = εrε0 e costante magnetica µ = µ0. Inoltre si assume
che all’esterno del dielettrico εout = ε0.
Il problema agli autovalori `e troppo complesso per essere risolto esattamente, quindi per il calcolo delle risonanze si procede nel modo seguente:
1 Si scrivono i campi nelle zone I e II, partendo dalle equazioni di Maxwell espresse in coordinate cilindriche, trascurando le superfici perpendico-lari all’asse, z = ±H, e assumendo una dipendenza dei campi lungo z di tipo armonico, con costante di propagazione h.
CAPITOLO 3. RISUONATORI IN ZAFFIRO 31 2 Dalle condizioni al contorno sulle superfici di separazione tra dielettrici, ossia la continuit`a delle componenti di E ed H tangenti alla superficie del cilindro, si ottengono i modi della guida d’onda dielettrica. Ad ogni modo, caratterizzato dai numeri m ed n, `e associata una funzione k0(h)
che lega il numero d’onda della radiazione, e di conseguenza la frequen-za di risonanfrequen-za, alla costante di propagazione assiale. Per ogni numero modale m e n, come definiti nella precedente sezione, ci sono due modi che, nel caso di materiale dielettrico non possono pi`u essere distinti in TE e TM ma sono in generale ibridi, ossia una sovrapposizione dei due. 3 Si scrivono i campi nelle zone I e III assumendo che i modi siano TE o
TM.
4 Dalla continuit`a delle componenti tangenziali dei campi alle superfici z = ± H si trovano delle funzioni k0(h). Anche qui queste funzioni legano la
costante di propagazione assiale h al numero d’onda e quindi alla fre-quenza e sono per`o indicizzate dai numeri modali m e p. Per ogni m e p esiste sia il modo TE che il modo TM.
5 L’intersezione tra le funzioni k0(h) trovate al punto 2 ed al punto 4
deter-mina, per ogni modo T Emnp o T Mmnp, un unico valore per k0 e quindi
determina in modo univoco la frequenza di risonanza. I dettagli del calcolo sono riportati in appendice B.
3.2
Prove sperimentali sui risuonatori
3.2.1
Risuonatore in allumina
Le prime prove sui risuonatori dielettrici sono state fatte con dischi di allu-mina (Al2O3), ciascuno di raggio a = 15.15 mm e altezza 5 mm.
L’allumina `e stata scelta poich´e ha la stessa composizione dello zaffiro; questi due materiali si differenziano perch´e lo zaffiro ha una struttura cristallina anisotropa, mentre l’allumina `e amorfa e quindi isotropa; il primo ha la per-meabilit`a elettrica uguale su due degli assi principali e diversa sul terzo,
CAPITOLO 3. RISUONATORI IN ZAFFIRO 32 chiamato asse C, la seconda ha la permeabilit`a elettrica uguale su tutti e tre gli assi. La costante dielettrica dell’allumina `e vicina a quella dello zaffiro, mentre la tangente di perdita a 10 GHz `e peggiore di un fattore maggiore di 10.
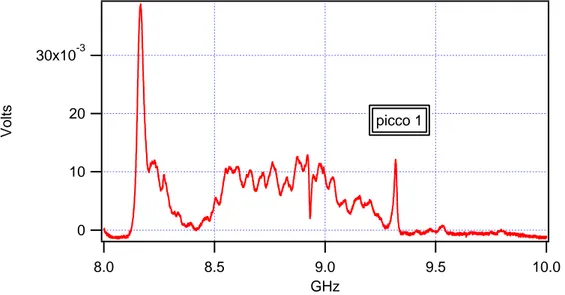
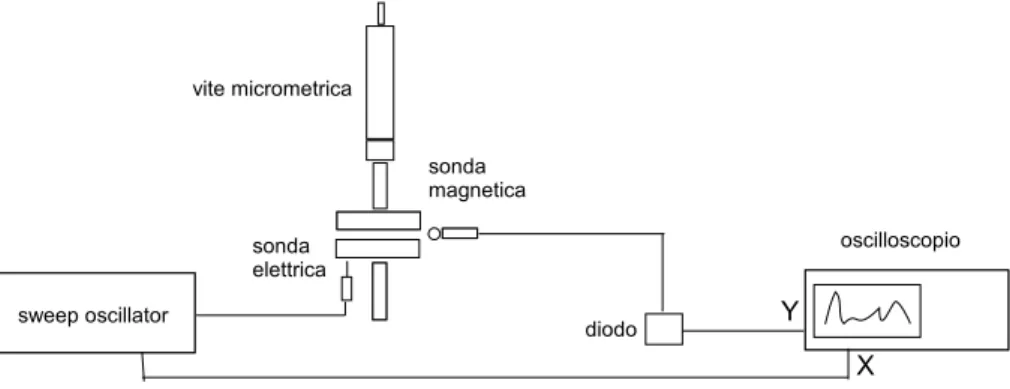
Lo scopo di queste prove `e quello di vedere i modi in cui risuonano due dischi sovrapposti, ottenendo cos`i quelli di un risuonatore di altezza totale 10 mm, e confrontare le frequenze trovate sperimentalmente con quelle teoriche. In figura (3.2) `e mostrato l’apparato di misura. Il segnale a microonde `e
sta-sweep oscillator sonda elettrica sonda magnetica diodo oscilloscopio Y X
Figura 3.2: Apparato per l’acquisizione degli spettri del risuonatore. to generato tramite lo sweep oscillator HP 8350B. Alla cavit`a viene inviato un segnale modulato in frequenza, con frequenza centrale f0 ed ampiezza di
modulazione ∆f . La forma del segnale di modulazione `e a “dente di sega”. L’eccitazione avviene attraverso una sonda elettrica, diretta, come si vede in figura (3.2), parallelamente all’asse del cilindro, per eccitare solo i modi quasi-TM.
Il segnale di risposta, in trasmissione, della cavit`a `e stato rivelato con una sonda magnetica, disposta in direzione radiale, in modo da essere accoppiata ad Hϕ, ed `e stato inviato ad un diodo rivelatore, il cui segnale rettificato `e
stato osservato con un oscilloscopio. L’asse X dell’oscilloscopio `e sincrono con la spazzata dell’oscillatore, in questo modo, sullo schermo dell’oscilloscopio, si visualizza lo spettro in trasmissione della cavit`a.
`
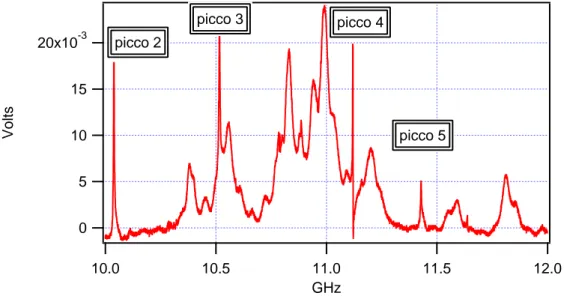
E stato inviato sia un segnale a frequenza centrale 9.0 GHz, con sweep di 2.0 GHz, sia un segnale a frequenza centrale 11.0 GHz, con sweep sempre di 2.0 GHz. Gli spettri risultanti sono mostrati in figura (3.3) e figura (3.4). In tabella (3.1) si riporta il modo attribuito a ciascuna risonanza, il numero azimutale m sperimentale, la frequenza sperimentale e teorica, la differenza relativa tra le due ed infine il fattore di qualit`a QL sperimentale.
CAPITOLO 3. RISUONATORI IN ZAFFIRO 33 30x10-3 20 10 0 Volts 10.0 9.5 9.0 8.5 8.0 GHz picco 1
Figura 3.3: Spettro in trasmissione di due dischi in allumina uniti (a = 15.15 mm, H = 5.00 mm), nel range di frequenza 8 - 10 GHz.
Il numero azimutale m `e stato ricavato variando la posizione della sonda elet-trica lungo la direzione azimutale, cio`e l’angolo tra le due sonde. In questo modo si riesce a contare il numero dei massimi della potenza del campo elet-tromagnetico durante la variazione, che sono 2m, da cui si ricava il numero azimutale m. Non `e stato possibile ricavare m per tutte le risonanze dato che i modi non erano molto puliti.
La frequenza di risonanza `e stata misurata facendo lavorare l’oscillatore in modalit`a CW, ossia viene generato un segnale a frequenza fissa. La frequenza dell’oscillatore `e stata settata sul massimo della risonanza della cavit`a e se ne `e misurato il valore con il frequency counter HP 5343A. Non tutte le riso-nanze individuate sembrano essere modi T Mm11, di cui sono state calcolate
le frequenze teoriche.
Una volta ottenuto il valore di f0 attraverso il metodo descritto
precedente-mente, si `e misurata la larghezza della curva a met`a altezza, ∆f0, e poi si `e
calcolato il fattore di qualit`a Q come: Q = f0
CAPITOLO 3. RISUONATORI IN ZAFFIRO 34 20x10-3 15 10 5 0 Volts 12.0 11.5 11.0 10.5 10.0 GHz picco 2 picco 3 picco 4 picco 5
Figura 3.4: Spettro in trasmissione di due dischi in allumina uniti (a = 15.15 mm, H = 5.00 mm), nel range di frequenza 10 - 12 GHz.
I valori di δf /ftheo, dove δf = fexp−ftheo, sono stati calcolati utilizzando, nel
calcolo delle frequenze teoriche, il valore ottimizzato di εr, trovato a partire
dalle frequenze teoriche per il risuonatore formato da un solo disco, come si discuter`a in seguito.
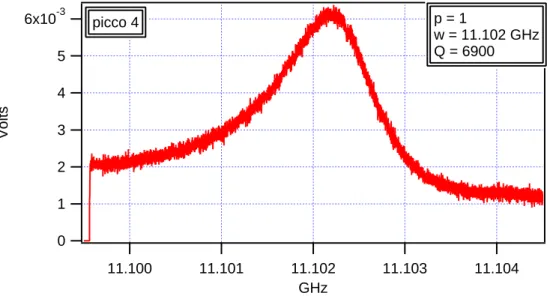
Si riporta in figura (3.5) la risonanze corrispondente al picco 3 di figura (3.4). Non tutti i modi T Mm11 della tabella (3.1), anche per effetto del diverso
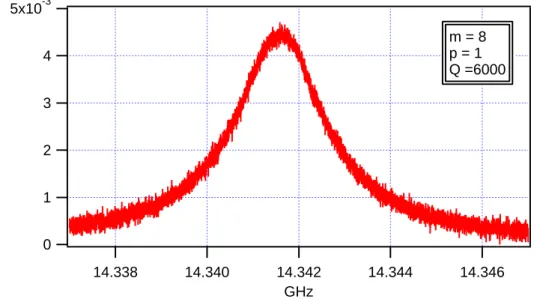
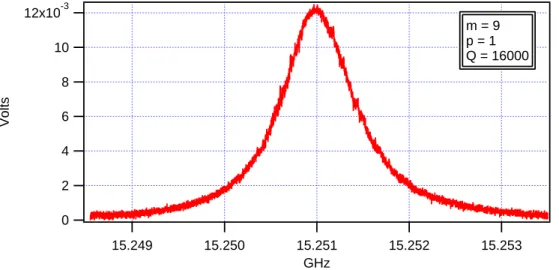
accoppiamento, si vedono nelle figure (3.3) e (3.4). Le stesse prove sono state eseguite su un singolo disco ma, poich`e il relativo spettro non era abbastanza pulito da permettere l’identificazione precisa delle risonanze corrispondenti ai modi Whispering Gallery; in figura (3.6) e figura (3.7) vengono riportate le uniche due risonanze che sono state identificate a partire dalle frequenze teoriche. Inoltre in tabella (3.2) si riportano i dati ottenuti per il risuonatore di semialtezza 2.5 mm, calcolati utilizzando il metodo precedente.
Ogni voce della tabella `e stata trovata come nel caso precedente. Si possono notare dei valori di δf /f molto bassi poich´e su queste risonanze `e stato ottimizzato il valore della costante dielettrica, il cui valore, εr = 9.81, `e in
CAPITOLO 3. RISUONATORI IN ZAFFIRO 35
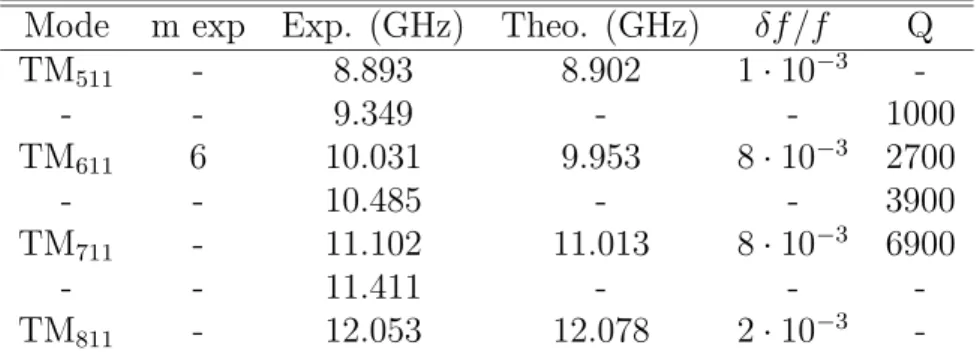
Mode m exp Exp. (GHz) Theo. (GHz) δf /f Q
TM511 - 8.893 8.902 1 · 10−3 -- - 9.349 - - 1000 TM611 6 10.031 9.953 8 · 10−3 2700 - - 10.485 - - 3900 TM711 - 11.102 11.013 8 · 10−3 6900 - - 11.411 - - -TM811 - 12.053 12.078 2 · 10−3
-Tabella 3.1: Confronto fra le frequenze misurate e le frequenze calcolate con due dischi di allumina (a = 15.15 mm, H = 5 mm, ²r = 9.81). I valori teorici
sono stati ricavati risolvendo le equazioni in appendice B con un programma di calcolo.
Mode m exp Exp. (GHz) Theo. (GHz) δf /f Q
TM811 8 14.342 14.341 7·10−5 6000
TM911 9 15.251 15.279 2·10−3 16000
Tabella 3.2: Confronto fra le frequenze misurate e le frequenze calcolate con un disco di allumina (a = 15.15 mm, H = 2.5 mm, ²r= 9.81). I valori teorici
sono stati ricavati risolvendo le equazioni in appendice B con un programma di calcolo.
3.2.2
Risuonatori in zaffiro
Come secondo passo sono stati studiati i risuonatori formati da due dischi di zaffiro. Le prove eseguite in precedenza ci hanno consigliato di utilizzare dischi di diametro maggiore, per confinare meglio il campo elettromagnetico. Sono stati acquistati 4 dischi di raggio a = 21.0 mm e altezza h = 5.00 mm, la qualit`a del cristallo `e ottica e le superfici non sono lucidate.
Nella tabella (3.3) si riportano le dimensioni di ciascun disco, la massa `e stata misurata solo per il primo disco dato che gli altri erano gi`a incollati al sostegno.
Nei nostri risuonatori l’asse lungo il quale una componente principale della permeabilit`a elettrica `e diversa dalle altre due (asse C), `e orientato lungo l’asse z del cilindro (εz 6= εr, εr = εϕ).
Le prove sono state eseguite esattamente come nella precedente sezione e in figura (3.8) ed in figura (3.9) vengono mostrati gli spettri in trasmissione
CAPITOLO 3. RISUONATORI IN ZAFFIRO 36 6x10-3 5 4 3 2 1 0 Volts 11.104 11.103 11.102 11.101 11.100 GHz p = 1 w = 11.102 GHz Q = 6900 picco 4
Figura 3.5: Cavit`a in allumina, formata da due dischi sovrapposti. Risonanza, vista i trasmissione, relativa al modo T M710.
diametro (mm) altezza (mm) massa (g)
disco 1 42.1 5.06 28.04
disco 2 42.1 5.00
-disco 3 42.2 5.08
-disco 4 42.1 5.00
-Tabella 3.3: Dimensioni dei dischi di zaffiro
relativi al risuonatore formato da due dischi di zaffiro. Ciascuna risonanza nei grafici `e identificata tramite il suo numero azimutale m.
Gli spettri appaiono molto pi`u puliti rispetto a quelli ottenuti con l’allumina ed i valori relativi ai fattori di qualit`a Q di ogni risonanza sono molto pi`u alti. In tabella (3.4) vengono riportati il modo di ciascuna risonanza, il numero azimutale m sperimentale, la frequenza sperimentale e teorica, la differenza relativa tra le due ed infine il fattore di qualit`a Q sperimentale. I valori del numero azimutale m sono stati verificati per ciascuna risonanza e sono stati controllati sperimentalmente anche i valori di n e p. Il primo `e stato ricavato spostando la sonda elettrica lungo il raggio del risuonatore e il secondo spostando la sonda magnetica lungo l’asse z e contando i massimi della potenza del campo elettromagnetico durante lo spostamento.
CAPITOLO 3. RISUONATORI IN ZAFFIRO 37 5x10-3 4 3 2 1 0 Volts 14.346 14.344 14.342 14.340 14.338 GHz m = 8 p = 1 Q =6000
Figura 3.6: Figura della risonanza corrispondente al modo T M811, di un disco
di allumina (a = 15.15 mm, H = 2.5 mm)
I valori di ²z e di ²r sono stati presi dalla referenza [23].
3.3
Trasduttore posizione-frequenza
Per ottenere un trasduttore posizione frequenza si pu`o utilizzare una ca-vit`a formata da due dischi di dielettrico separati da una distanza 2d, come mostrato in figura (3.10). La frequenza di risonanza della cavit`a cos`i formata dipende dalla distanza 2d tra i due dischi. Per trovare le frequenze di riso-nanza al variare della distanza, occorre scrivere i campi anche nella regione V in figura (3.10) e, quando si esegue il matching assiale, occorre applicare le condizioni di continuit`a sulle superfici z = ±d e z = ±(d + H). L’equazione che si ottiene `e riportata in appendice B.5.2, da cui si possono calcolare le frequenze di risonanza in funzione della distanza.
La sensibilit`a di un trasduttore di questo genere `e legata al fattore di qualit`a Q della risonanza ed al fattore di accordabilit`a df /dz, dove f `e la frequenza della risonanza e z `e la variazione di 2d.
Il prodotto Qf · ∂f∂z viene definito fattore di merito del trasduttore ed `e la quantit`a che ne determina la sensibilit`a alle variazioni di posizione. Le
va-CAPITOLO 3. RISUONATORI IN ZAFFIRO 38 12x10-3 10 8 6 4 2 0 Volts 15.253 15.252 15.251 15.250 15.249 GHz m = 9 p = 1 Q = 16000
Figura 3.7: Figura della risonanza corrispondente al modo T M911, di un disco
di allumina (a = 15.15 mm, H = 2.5 mm)
riazioni di distanza tra i dischi influenzano maggiormente la frequenza nei modi TM piuttosto che nei modi TE. Infatti dalle condizioni al contorno sulla superficie, risulta che tutte le componenti principali dei modi TE ri-mangono invariate, mentre la componente Ez dei modi TM `e discontinua
sulla superficie del dielettrico, aumentando nello spazio tra i dischi. Questo `e il motivo per cui si prendono in esame i modi TM.
3.4
Prove sperimentali sui trasduttori
3.4.1
Trasduttore in allumina
Con questa prova si `e voluto studiare il coefficiente di accordabilit`a dei modi individuati come T Mm,1,1 del trasduttore di allumina. Si `e misurata la
va-riazione di frequenza in funzione della distanza per ciascuna risonanza e si `e valutata la derivata df /dz punto per punto dei dati ottenuti, in funzione della distanza z tra i dischi.
In figura (3.11) viene mostrato l’apparato di misura. Per misurare la va-riazione di frequenza di ciascuna risonanza si `e mantenuto il disco inferiore fisso, mentre il disco superiore `e stato fissato ad una vite micrometrica, in modo che si potesse muovere solidale con essa.
CAPITOLO 3. RISUONATORI IN ZAFFIRO 39 1.4 1.2 1.0 0.8 0.6 0.4 0.2 0.0 Volts 11.0 10.5 10.0 9.5 9.0 8.5 8.0 GHz n = 1 p = 1 m = 7 m = 8 m = 9 m = 10 m = 11
Figura 3.8: Spettro in trasmissione del risuonatore formato da due dischi in zaffiro uniti (a = 21.0 mm, H = 5 mm), nel range di frequenza 8 - 11 GHz. Per ogni risonanza si `e misurata la frequenza con i dischi uniti, poi, con passo di 0.01 mm si sono allontanati fino ad una distanza di 0.4 mm e per ogni passo si `e misurata la frequenza. Dai grafici che riportano la variazione di frequenza in funzione della distanza, si pu`o notare, che le frequenze sono leggermente spostate rispetto ai valori trovati quando sono stati acquisiti gli spettri; le prove non sono state fatte lo stesso giorno e rimontando l’apparato `e possibile che i dischi siano stati allineati in modo differente. Questo comunque non pregiudica il valore del coefficiente di accordabilit`a.
Nei grafici delle figure (3.12) ÷ (3.15) sono riportati i dati sperimentali, rappresentati con i punti, e i dati teorici, rappresentati con una linea. Come si pu`o vedere in tutti i grafici A, per i primi punti non c’`e variazione poich´e i dischi non erano ancora completamente separati.
3.4.2
Trasduttore in zaffiro
Le stesse prove fatte per il trasduttore in allumina sono state ripetute con i dischi in zaffiro e si mostrano i relativi grafici nelle figure (3.16) ÷ (3.22). In alcuni grafici relativi alla variazione di df /dz rispetto alla distanza tra i dischi, per esempio quelli per i modi T M9,1,1 ÷ T M13,1,1, si vede che
alcu-CAPITOLO 3. RISUONATORI IN ZAFFIRO 40 1.4 1.2 1.0 0.8 0.6 0.4 0.2 0.0 Volts 13.0 12.5 12.0 11.5 11.0 GHz m = 12 m = 13 m = 14 n = 1 p = 1
Figura 3.9: Spettro in trasmissione del risuonatore formato da due dischi in zaffiro uniti (a = 21.0 mm, H = 5 mm), nel range di frequenza 11 - 13 GHz. ni punti sperimentali si discostano visibilmente dalla curva teorica. Questo fenomeno `e dovuto ad un’interazione tra due modi Whispering Gallery che pu`o determinare un salto di frequenza o una variazione del fattore di merito Q del modo.
Esistono due tipi di interazione: induttiva e resistiva [16]. Se l’interazione determina una transizione da un modo ad un altro, cio`e durante la vari-azione di distanza tra i dischi si nota un salto di frequenza del modo che si sta osservando, l’interazione `e induttiva, se quello che varia `e il Q del modo e la frequenza rimane inalterata, o si ha un salto trascurabile, l’interazione `e resistiva. Praticamente nel primo caso si osserva che, all’aumentare del-la distanza tra i dischi, del-la velocit`a di variazione di frequenza di un modo decresce, mentre quella di un modo a frequenza maggiore cresce repentina-mente. Nel caso di interazione resistiva, invece, si vede che il modo che cambia frequenza, quando incontra un altro modo, lo sorpassa e si nota solo una lieve diminuzione del Q.
CAPITOLO 3. RISUONATORI IN ZAFFIRO 41
Mode m exp Exp. (GHz) Theo. (GHz) δf /f Q
TM7,1,1 7 8.235 8.262 0.3% 13700 TM8,1,1 8 8.889 8.918 0.3% 17800 TM9,1,1 9 9.551 9.581 0.3% 23900 TM10,1,1 10 10.221 10.250 0.3% 25700 TM11,1,1 11 10.897 10.926 0.3% 54700 TM12,1,1 12 11.578 11.606 0.2% 58200 TM13,1,1 13 12.264 12.290 0.2% ♠ TM14,1,1 14 12.953 12.977 0.2% ♠ ♠ In questi modi Q non si misura facilmente poich`e risultano essere doppietti.
Tabella 3.4: Confronto fra le frequenze misurate e le frequenze calcolate con due dischi di zaffiro (a = 21.0 mm, H = 5.0 mm, ²r = 9.37, ²z = 11.35). I
valori teorici sono stati ricavati risolvendo le equazioni in appendice B con un programma di calcolo.
3.4.3
Scelta della risonanza e variazione della
larghez-za della curva
Dato che `e stato scelto di lavorare in banda X (8 ÷ 12 GHz), in seguito a queste prove, `e stato preso, come risonanza su cui lavorare, il modo T M11,1,1.
Questo modo `e caratterizzato dalla frequenza di risonanza di 10.890 GHz, con un Q intorno a 54000, e presenta il migliore coefficiente di accordabilit`a
df
dz alla distanza tra i dischi di 100 µm, ossia circa 6 MHz/µm; infatti, come
`e stato spiegato nel capitolo 2, la distanza tra i due dischi sar`a regolata in modo tale che, per valori standard di g, risulti di 100 µm.
Come ulteriore prova `e stata anche misurata la variazione della larghezza della curva di risonanza scelta con la variazione della distanza tra i dischi, fino a raggiungere una separazione di 200 µm. La prova `e stata effettuata seguendo il procedimento descritto prima e misurando anche la larghezza della curva ad ogni variazione di dz.
Il risultato della prova `e mostrato nel grafico (3.23). Si pu`o notare che la larghezza della curva di risonanza varia ma in maniera tale da rientrare sem-pre nell’errore, che `e stato valutato in base alla risoluzione ottenuta all’oscillo-scopio (0.1 MHz/div). Inoltre il fenomeno di accoppiamento induttivo che si era presentato proprio alla distanza tra i dischi di 100 µm, in questa prova si `e
CAPITOLO 3. RISUONATORI IN ZAFFIRO 42
Figura 3.10: Schematizzazione di un trasduttore posizione-frequenza dielettrico cilindrico.
presentato prima che i dischi raggiungessero tale distanza. Questa variazione `e dovuta al diverso accoppiamento tra le sonde. Con un accoppiamento op-portuno, quindi `e possibile intervenire sulla frequenza alla quale si verifica l’accoppiamento induttivo, permettendo di scegliere la distanza alla quale si preferisce lavorare.
CAPITOLO 3. RISUONATORI IN ZAFFIRO 43 sweep oscillator vite micrometrica sonda elettrica sonda magnetica diodo oscilloscopio X Y
Figura 3.11: Apparato per la misura di df /dz.
10.0x103 9.8 9.6 9.4 9.2 9.0 MHz 400 300 200 100 0 µm f0 = 8892.89 MHz A 5 4 3 2 1 MHz / µm 400 300 200 100 0 µm f0 = 8893 MHz B
Figura 3.12: Risuonatore in allumina. A: Confronto tra le frequenze calcolate e sperimentali per il modo T M5,1,1 in funzione della distanza tra i dischi; B:
Variazione del coefficiente di accordabilit`a df /dz in funzione della distanza tra i dischi.
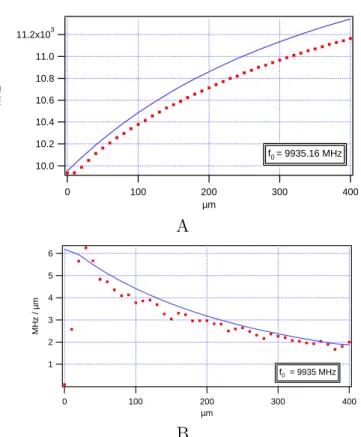
CAPITOLO 3. RISUONATORI IN ZAFFIRO 44 11.2x103 11.0 10.8 10.6 10.4 10.2 10.0 MHz 400 300 200 100 0 µm f0 = 9935.16 MHz A 6 5 4 3 2 1 MHz / µm 400 300 200 100 0 µm f0 = 9935 MHz B
Figura 3.13: Risuonatore in allumina. A: Confronto tra le frequenze calcolate e sperimentali per il modo T M6,1,1 in funzione della distanza tra i dischi; B:
Variazione del coefficiente di accordabilit`a df /dz in funzione della distanza tra i dischi.
CAPITOLO 3. RISUONATORI IN ZAFFIRO 45 12.4x103 12.2 12.0 11.8 11.6 11.4 11.2 MHz 400 300 200 100 0 µm f0 = 11061 MHz A 7 6 5 4 3 2 MHz/µm 400 300 200 100 0 µm f0 = 11061 MHz B
Figura 3.14: Risuonatore in allumina. A: Confronto tra le frequenze calcolate e sperimentali per il modo T M7,1,1 in funzione della distanza tra i dischi; B:
Variazione del coefficiente di accordabilit`a df /dz in funzione della distanza tra i dischi.
CAPITOLO 3. RISUONATORI IN ZAFFIRO 46 13.4x103 13.2 13.0 12.8 12.6 12.4 12.2 MHz 400 300 200 100 0 µm f0 = 12128 MHz A 8 6 4 2 MHz/µm 400 300 200 100 0 µm f0 = 12128 MHz B
Figura 3.15: Risuonatore in allumina. A: Confronto tra le frequenze calcolate e sperimentali per il modo T M8,1,1 in funzione della distanza tra i dischi; B:
Variazione del coefficiente di accordabilit`a df /dz in funzione della distanza tra i dischi.
CAPITOLO 3. RISUONATORI IN ZAFFIRO 47 9600 9400 9200 9000 8800 8600 8400 8200 MHz 400 300 200 100 0 µm f0 = 8206 MHz A 5 4 3 2 1 MHZ/µm 400 300 200 100 0 µm f0 = 8206 MHz B
Figura 3.16: Risuonatore in zaffiro. A: Confronto tra le frequenze calcolate e sperimentali per il modo T M7,1,1 in funzione della distanza tra i dischi; B:
Variazione del coefficiente di accordabilit`a df /dz in funzione della distanza tra i dischi.
CAPITOLO 3. RISUONATORI IN ZAFFIRO 48 10.4x103 10.2 10.0 9.8 9.6 9.4 9.2 9.0 MHz 400 300 200 100 0 µm f0 = 8855.53 MHz A 6 5 4 3 2 1 MHz/µm 400 300 200 100 0 µm f0 = 8855.53 MHz B
Figura 3.17: Risuonatore in zaffiro. A: Confronto tra le frequenze calcolate e sperimentali per il modo T M8,1,1 in funzione della distanza tra i dischi; B:
Variazione del coefficiente di accordabilit`a df /dz in funzione della distanza tra i dischi.
CAPITOLO 3. RISUONATORI IN ZAFFIRO 49 11.0x103 10.8 10.6 10.4 10.2 10.0 9.8 9.6 MHz 400 300 200 100 0 µm f0 = 9519.08 MHz A 7 6 5 4 3 2 1 MHz/µm 400 300 200 100 0 µm f0 = 9519.08 MHz B
Figura 3.18: Risuonatore in zaffiro. A: Confronto tra le frequenze calcolate e sperimentali per il modo T M9,1,1 in funzione della distanza tra i dischi; B:
Variazione del coefficiente di accordabilit`a df /dz in funzione della distanza tra i dischi.
CAPITOLO 3. RISUONATORI IN ZAFFIRO 50 11.8x103 11.6 11.4 11.2 11.0 10.8 10.6 10.4 10.2 MHz 400 300 200 100 0 µm f0 = 10189.47 MHz A 6 4 2 0 MHz/µm 400 300 200 100 0 µm f0 = 10189.47 MHz B
Figura 3.19: Risuonatore in zaffiro. A: Confronto tra le frequenze calcolate e sperimentali per il modo T M10,1,1 in funzione della distanza tra i dischi; B:
Variazione del coefficiente di accordabilit`a df /dz in funzione della distanza tra i dischi.
CAPITOLO 3. RISUONATORI IN ZAFFIRO 51 12.6x103 12.4 12.2 12.0 11.8 11.6 11.4 11.2 11.0 MHz 400 300 200 100 0 µm f0 = 10863.74 MHz A 8 6 4 2 0 MHz/µm 400 300 200 100 0 µm f0 = 10863.74 MHz B
Figura 3.20: Risuonatore in zaffiro. A: Confronto tra le frequenze calcolate e sperimentali per il modo T M11,1,1 in funzione della distanza tra i dischi; B:
Variazione del coefficiente di accordabilit`a df /dz in funzione della distanza tra i dischi.
CAPITOLO 3. RISUONATORI IN ZAFFIRO 52 13.0x103 12.5 12.0 MHz 400 300 200 100 0 µm f0 = 11549.55 MHz A 8 6 4 2 MHz/µm 400 300 200 100 0 µm f0 =11549.55 MHz B
Figura 3.21: Risuonatore in zaffiro. A: Confronto tra le frequenze calcolate e sperimentali per il modo T M12,1,1 in funzione della distanza tra i dischi; B:
Variazione del coefficiente di accordabilit`a df /dz in funzione della distanza tra i dischi.
CAPITOLO 3. RISUONATORI IN ZAFFIRO 53 14.0x103 13.5 13.0 12.5 MHz 400 300 200 100 0 µm f0 = 12228.35 MHz A 10 8 6 4 2 0 MHz/µm 400 300 200 100 0 µm f0 = 12228.35 MHz B
Figura 3.22: Risuonatore in zaffiro. A: Confronto tra le frequenze calcolate e sperimentali per il modo T M13,1,1 in funzione della distanza tra i dischi; B:
Variazione del coefficiente di accordabilit`a df /dz in funzione della distanza tra i dischi.
CAPITOLO 3. RISUONATORI IN ZAFFIRO 54 11.8x103 11.6 11.4 11.2 11.0 MHz 200 150 100 50 0 µm TM11, 1, 1 A 8000 6000 4000 2000 0 MHz/µm 200 150 100 50 0 µm TM11, 1, 1 B 0.5 0.4 0.3 0.2 0.1 0.0
Larghezza a metà altezza
200 150 100 50 0 µm C
Figura 3.23: Risuonatore in zaffiro. A: Confronto tra le frequenze calcolate e sperimentali per il modo T M11,1,1 in funzione della distanza tra i dischi.
Con i quadri blu `e riportata la curva relativa alla prima prova e con una linea rossa quella relativa alla seconda prova; B: Variazione del relativo coefficiente di accordabilit`a df /dz in funzione della distanza tra i dischi; C: Variazione della larghezza a met`a altezza ∆f misurata durante la seconda prova (curve in rosso nei grafici A e B).
Capitolo 4
Circuito interferometrico
4.1
Introduzione
In questo capitolo verr`a studiato il sistema di lettura a microonde, che for-nisce il segnale utile per la misura del gradiente di gravit`a ottenuto misurando la differenza di frequenza dei due trasduttori.
Prima `e stata studiata e provata una versione del circuito in cui si fa uso di un generatore a microonde esterno, in seguito `e stato realizzato il circuito interferometrico secondo lo schema di Blair et al. [16], nel quale la sorgente a microonde `e un oscillatore creato da un amplificatore reazionato su una delle due cavit`a.
La prima versione del circuito `e mostrata in figura (4.1). In questa configu-razione, la potenza in uscita dal generatore viene divisa in parti uguali nei due rami da un Power Divider. In entrambi i rami `e presente una cavit`a, che ha la funzione di elemento discriminatore in frequenza. I campi a microonde, riflessi da ogni cavit`a tramite due circolatori, vengono ricombinati con un Power Combiner. In entrambi i rami la presenza di un attenuatore e di un Phase Shifter permette di regolare al meglio il punto di lavoro del circuito. Il segnale in uscita al Power Combiner viene misurato in maniera coerente dal Mixer, pilotato dal generatore a microonde esterno come Local Oscillator. Il mixer ha due porte di ingresso, una chiamata RF (Radio Frequency), dove entra il segnale da analizzare ed una LO (Local Oscillator), dove entra il segnale con cui confrontare quello in RF. Sulla porta di uscita, chiamata IF
CAPITOLO 4. CIRCUITO INTERFEROMETRICO 56
Figura 4.1: Schema del circuito di readout a microonde, con generatore esterno, del gradiometro gravitazionale.
(Intermediate Frequency) si trova il segnale somma e differenza in frequenza dei segnali alle porte LO ed RF
Nel nostro caso LO ed RF hanno la stessa frequenza, dunque la loro dif-ferenza `e zero ed in uscita. Alla porta IF si ha un segnale dc che dipende dall’ampiezza del segnale RF e dalla fase relativa tra i segnali LO ed RF:
IF = KARFcos(φRF − φ0) (4.1)
dove ARF `e l’ampiezza di RF, φRF `e la fase di RF e φ0`e una fase che pu`o essere
regolata con un phase shifter. L’ampiezza di LO viene considerata costante e rientra nella costante di proporzionalit`a K insieme ad altri parametri propri del mixer. In base a come viene regolata la fase φ0, il mixer avr`a un’uscita
proporzionale alla fase φRF quando φ0 ≈ φRF+π/2, o all’ampiezza del segnale
R.F. quando φ0 ≈ φRF.
Si pu`o vedere in figura (4.2) come varia l’uscita del mixer a diversi valori di φ0 mandando all’ingresso RF il segnale in riflessione da una cavit`a, che, come
CAPITOLO 4. CIRCUITO INTERFEROMETRICO 57 sar`a ricavato pi`u avanti, ha l’andamento mostrato in figura (4.4).
Per capire il funzionamento del circuito, va studiato il campo riflesso dalle
Figura 4.2: Uscita del mixer per diversi valori della fase del segnale LO, con in ingresso RF il segnale di figura (4.4).
cavit`a. Questo studio pu`o essere fatto schematizzando la cavit`a a microonde con elementi circuitali.
4.2
Cavit`
a a microonde come elemento
cir-cuitale
4.2.1
Cavit`
a risonante con una sonda di
accoppiamen-to
Una linea di trasmissione con impedenza caratteristica Z0, chiusa su
un’im-pedenza Za, ha un coefficiente di riflessione Γ complesso, dato dalla seguente
formula: Γ = Erif l Einc = Za− Z0 Za+ Z0 = Za Z0 − 1 Za Z0 + 1 (4.2)
![Tabella 2.2: Tabella con alcune costanti del silicio [18].](https://thumb-eu.123doks.com/thumbv2/123dokorg/7238631.79336/20.892.286.682.627.809/tabella-tabella-alcune-costanti-silicio.webp)