INDICE... - 1 -
INTRODUZIONE ... 4
1 STRUTTURA DI UN GENERATORE EOLICO... 7
1.1 STRUTTURADIUNGENERATOREEOLICO ... 7
1.1.1 Pale della turbina... 8
1.1.2 Torre ... 10
1.1.3 Navicella e mozzo delle pale ... 10
1.1.4 Trasmissione ... 12
1.1.5 Sistema frenante... 13
1.1.6 Meccanismo di yaw ... 14
1.1.7 Generatore elettrico ... 14
2 MODI PROPRI DI VIBRARE E TECNICHE DI CONDENSAZIONE ... 15
2.1 VIBRAZIONINATURALI... 15
2.1.1 Calcolo dei coefficienti della matrice di smorzamento di Rayleigh ... 18
2.2 ANALISICONLESOTTOSTRUTTURE... 19
2.2.1 Analisi statiche... 21
2.2.2 Analisi in regime transitorio ... 23
2.2.3 Component Modal Synthesis (CMS) ... 24
3 TEORIA DEI GENERATORI EOLICI ... 28
3.1 LATEORIADELMOMENTOEILLIMITEDIBETZ... 28
3.1.1 Teoria della quantità di moto... 30
3.1.2 Il limite di Betz ... 32
3.2 LATEORIADELDISCOROTANTE... 32
3.3 TEORIABEM(BLADE ELEMENT-MOMENTUM THEORY) ... 36
3.4 CURVECARATTERISTICHEDIUNGENERATOREEOLICO ... 41
3.5.1 Strato limite ambientale ... 43
3.5.2 Velocità media del vento ... 45
4 MODELLAZIONE DELLA TURBINA ... 48
4.1 MODELLAZIONEDELLAPALA... 49
4.2 MODELLAZIONEDELMOZZO ... 50
4.3 MODELLAZIONEDELLATORRE ... 51
4.4 MODELLAZIONEDELLANAVICELLAEDELLATRASMISSIONE... 52
5 ANALISI MODALE ... 55
5.1 ANALISIMODALE ... 57
5.1.1 Frequenze proprie delle pale ... 57
5.1.2 Frequenze proprie della torre ... 62
5.2 FREQUENZEPROPRIEDELLASTRUTTURAINCONDIZIONISTATICHE... 64
5.3 VALIDAZIONENUMERICADELMODELLO ... 71
5.4 ANALISIMODALECONPRESTRESS ... 76
6 CARICHI AERODINAMICI... 80
6.1 CALCOLODEICARICHIAERODINAMICI ... 81
6.2 ANALISIDINAMICADELCOMPORTAMENTODELLEPALEINCONDIZIONIDIVENTO INCIDENTEPARIA20 M/S E 10 M/S... 87
CONCLUSIONI... 93
BIBLIOGRAFIA ... 95
7 APPENDICE A ... 98
7.1 TIPOLOGIADIELEMENTIUTILIZZATI... 98
7.1.1 BEAM4 ... 98 7.1.2 PIPE16... 99 7.1.3 MASS21... 100 7.1.4 SHELL43... 101 8 APPENDICE B... 102 8.1 FILESANSYS... 102 8.1.1 Trasmissione e navicella ... 102 8.1.2 Pale ... 108 8.1.3 Torre ... 134
8.1.4 Mozzo ... 140
INTRODUZIONE
L’energia eolica è stata usata per un lungo periodo dall’uomo, infatti già dal 5000 A.C., gli Egiziani la usavano per far muovere le loro barche a vela sul Nilo (Anders Ahlstrom,
2005).
Nella storia l’energia eolica ha avuto molti utilizzi sino ad oggi, basti pensare ai mulini a vento utilizzati per l’irrigazione in Persia nel settimo secolo e successivamente per la macinazione della farina.
La moderna concezione delle turbine eoliche invece comincia intorno all’epoca della rivoluzione industriale, nel diciannovesimo secolo, quando vennero costruiti milioni di mulini a vento per pompare l’acqua per le fattorie americane.
La prima turbina eolica per la generazione elettrica fu costruita da Poul la Cour (Agli inizi del 1900); contemporaneamente gli americani progettarono una turbina da oltre 1 MW di taglia. Il risultato fu la turbina da 1.25 MW di Smith-Putnam, cioè la più grande turbina eolica mai costruita fino agli anni ‘40.
Nella seconda parte dello scorso secolo invece, lo sviluppo delle turbine eoliche è stato legato alla fluttuazione dei prezzi del petrolio, o più in generale, alla convenienza economica ad estrarre energia dal vento rispetto alle fonti fossili.Questo si è visto molto bene durante la crisi petrolifera degli anni ’70, dove a causa dei prezzi elevati del petrolio si è riacceso l’interesse per il risparmio energetico, le fonti rinnovabili e di conseguenza anche per le turbine eoliche.
Al giorno d’oggi l’eolico è probabilmente la fonte energetica alla quale si dà più attenzione per quanto riguarda la ricerca tecnologica, ed è anche la fonte che è cresciuta di più come istallazioni di potenza in tutto il mondo (raggiungendo gli oltre 40000 MW in tutto il
globo), questo grazie anche al basso costo del KWh prodotto dal vento, che risulta competitivo in molti casi anche su alcune fonti fossili.
Negli ultimi anni, per rendere la risorsa eolica ancora più competitiva economicamente, si è cercato di incrementare la taglia delle turbine, passando dalla media di 300 Kw degli anni novanta ai 5 MW degli ultimi prototipi esistenti.
Questo incremento di taglia ha causato anche un aumento di dimensione geometrica della struttura, fino ad avere torri di turbine che raggiungono anche i 100 m di altezza, e i relativi rotori oltre gli 80 m di diametro. L’aumento di dimensioni ha tuttavia comportato un aumento della cedevolezza della struttura, rendendola maggiormente sensibile alle vibrazioni e ai relativi fenomeni di danneggiamento e malfunzionamento, ed è per questo che si è resa necessaria una maggiore attenzione ai problemi strutturali e dinamici delle turbine eoliche.
Per poter analizzare i problemi strutturali e dinamici è necessario conoscere le frequenze naturali della struttura e di ogni componente, e i range delle possibili frequenze di eccitazione. In particolare nelle turbine di nuova generazione che presentano potenze, e quindi dimensioni maggiori, si cerca di ridurre il peso specifico dei materiali e di aumentare la flessibilità del rotore e della torre, e questo genera una riduzione delle frequenze naturali rispetto alle turbine più piccole. Inoltre con turbine di taglia maggiore, anche le frequenze naturali della trasmissione tendono a diminuire, e possono venire a coincidere con l’ordine di grandezza delle frequenze naturali della struttura, con il rischio che quest’ultima o il rotore eccitino il sistema di trasmissione o viceversa .
Molti codici sono stati sviluppati per modellare il comportamento dinamico delle turbine eoliche, o per estrapolare dati per la progettazione. Questi programmi si dividono in tre categorie, in base al metodo di calcolo che utilizzano: FEM (Finite Element Methods), MBS (MultiBody Simulation) e Assumed Modes approach.
Il primo metodo comprende programmi come: Alcione; GAST (include un simulatore di vento turbolento, analisi aeroelastica e un postprocessore dei carichi aerodinamici per l’analisi di fatica); HAWC (programma scritto appositamente per la risposta di turbine ad asse orizzontale con 2-3 pale); TWISTER (anche questo come GAST permette la simulazione del campo di moto stocastico e turbolento di vento); ANSYS (programma generico per l’analisi
strutturale statica e dinamica, che permette di considerare molti effetti come lo stress stiffening e lo spin softening).
Il secondo metodo invece comprende programmi quali: ADAMS/WT (è un pacchetto specifico per turbine eoliche, ed è compreso nel più ampio codice ADAMS/SOLVER) ; DUWECS (è specifico per turbine offshore); FLEXLAST (Programma molto usato per la progettazione e la certificazione dei rotori).
L’assumed modes approach è usato in codici come: BLADED (utilizza il metodo di Garad Hassan per il calcolo delle performance e dei carichi sulla turbina, ed è stato validato con molti dati sperimentali); FAST-AD; FLEX5 (il programma simula turbine con 2-3 pale regolabili o meno, e con generatori a velocità fissa o variabile); GAROS; VIDYN (utilizzato per la simulazione statica o dinamica delle turbine ad asse orizzontale).
Un’altra possibilità per fare delle simulazioni sulle turbine eoliche è con l’utilizzo delle toolbox di Matlab, che permettono di tracciare alcune delle curve caratteristiche delle turbine. Quest’ultimo programma però non permette di fare simulazioni molto flessibili.
Nel seguente lavoro viene proposta, in una prima fase, la modellazione agli elementi finiti (FEM) con il programma Ansys di un generatore eolico da 5 MW, implementata tramite la metodologia delle sottostrutture.
Successivamente con il modello costruito sono state eseguite diverse simulazioni, in particolare è stata eseguita un’analisi modale della struttura per trovare le frequenze e i modi propri della stessa. Inoltre sono state fatte delle prove prime dinamiche, con condizioni di carico corrispondenti a diverse velocità del vento.
1
STRUTTURA DI UN GENERATORE
EOLICO
1.1
STRUTTURA DI UN GENERATORE EOLICO
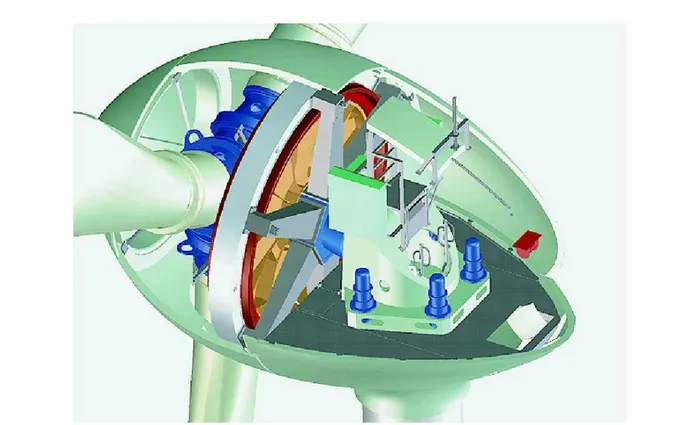
Tutte le turbine eoliche per la produzione di energia elettrica presentano un layout costruttivo comune, in quanto sono composte dal rotore che ruota orizzontalmente (HAWT: horizontal axis wind turbine) solidale ad mozzo (hub). Questo è connesso alla trasmissione (drive train) che a sua volta è collegata al generatore; entrambi questi organi meccanici sono posizionati all’interno della navicella (nacelle) posta sulla sommità della torre. L’energia elettrica prodotta viene poi distribuita alla rete tramite un trasformatore.
La più comune configurazione di turbina eolica è quella con rotore a tre pale (in alcuni casi si trovano due pale o una pala con un contrappeso); inoltre è possibile la regolazione degli angoli caratteristici della turbina, per avere una maggiore efficienza di raccolta dell’energia.
Di seguito viene riportato uno spaccato di una turbina eolica, nel quale vengono messi in risalto tutti i principali componenti (Anders Ahlstrom, 2005).
Figura 1-1 Schema del layout dei componenti di un generatore eolico
1.1.1
Pale della turbina
Tutte le pale con rotore ad asse orizzontale hanno un profilo ottimizzato per estrarre energia dal vento, tramite il lavoro fatto dalla forza di Lift (ascensionale), causato da una differenza di pressione tra i due lati della pala . Inoltre sono spesso presenti dei regolatori che possono all’occorrenza ruotare la pala intorno al proprio asse, in modo da massimizzare il rendimento della stessa al variare delle differenti velocità del vento e di rotazione.
Da un punto di vista costruttivo le pale possono essere fabbricate con vari materiali, anche se i più usati sono la fibra di carbonio rinforzata e la fibra di vetro rinforzata, i quali assicurano un basso peso specifico e una buona resistenza a fatica.
Come già detto in precedenza, il numero di pale presenti in una turbina eolica è solitamente tre. Questo è dovuto al fatto che per una determinata velocità di rotazione c’è un valore ottimale di area ricoperta dalle pale installate, e le tre consentono, a fronte di un
maggior costo di fabbricazione rispetto alla soluzione con due, un incremento del valore di efficienza pari a circa il 2-3%.
Molte pale presentano una struttura di rinforzo all’interno che può essere dei tipi riportati nelle figure successive.
Figura 1-2
Figura 1-4
1.1.2
Torre
Esistono due principali tipi di torre: tubolare in acciaio ed a traliccio. La prima è la tipologia più utilizzata e consiste in una torre di forma conica, fatta in acciaio, tramite la quale è possibile accedere alla navicella. La seconda è meno utilizzata, anche se meno costosa, in quanto non permette l’accesso in modo agevole alla navicella.
Un parametro fondamentale per il progetto della torre è la rigidezza complessiva che si vuole ottenere. Una torre più rigida ha il difetto di presentare delle frequenze naturali vicine a quelle delle pale e di avere un costo maggiore, ma in generale rispetto alla seconda è più resistente agli stress che possono essere generati dalle situazioni di carico o da fattori atmosferici.
1.1.3
Navicella e mozzo delle pale
La navicella contiene le parti principali della turbina , in particolare la trasmissione e il generatore elettrico. In molti casi è possibile accedervi per riparazioni o manutenzioni.
Il mozzo delle pale serve per connettere il rotore all’albero di trasmissione principale ed è un organo particolarmente sollecitato in quanto su di esso gravano tutti i carichi trasmessi dalle pale. Per questo è di solito fatto in acciaio, ed è uno degli elementi più rigidi e resistenti dell’intera struttura.
1.1.4
Trasmissione
Gli organi di trasmissione servono per connettere il rotore che gira a basse velocità (tipicamente compresi tra i 10 e i 20 giri al minuto) al generatore elettrico il quale gira a velocità molto più elevate. Tramite una serie di rotismi si cambia il rapporto di trasmissione e si raggiungono le velocità angolari tipiche del funzionamento dei generatori sincroni o asincroni.
Esistono vari layout del sistema di trasmissione ed i principali sono riportati in figura (Berthold S. , Tobias S. , Thomas H). La figura A presenta l’albero principale sorretto da due cuscinetti mentre il riduttore è sostenuto dall’albero. Nella figura B il riduttore è appoggiato sul sostegno inferiore ed uno dei cuscinetti è integrato. Nel sistema in fig.C i cuscinetti sono completamente integrati nel riduttore ed è il sistema di trasmissione diretta. Nel D la scatola di trasmissione è supportata tramite dei cuscinetti e l’albero è sollecitato principalmente a torsione.
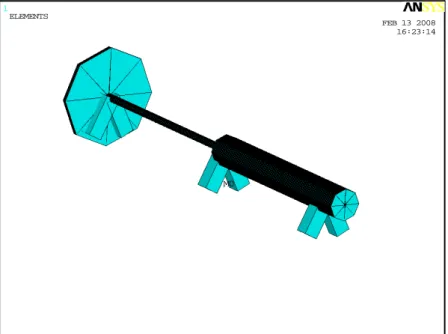
Figura 1-7 Sistema a trasmissione diretta
1.1.5
Sistema frenante
La potenza generata dal vento è proporzionale al cubo della sua velocità, e quindi in caso che quest’ultima sia troppo alta è necessario un sistema frenante che blocchi il rotore e che funzioni anche in situazioni di emergenza. Solitamente vengono installati due sistemi frenanti, il freno aerodinamico e quello meccanico.
Il primo serve nel caso la velocità del vento sia troppo elevata; in questo caso il freno agisce sulle pale cambiando la loro inclinazione .Il secondo sistema invece è solitamente un freno meccanico (a disco) e viene montato su uno dei due alberi di trasmissione e serve per bloccare totalmente l’albero in caso di guasto o di emergenza. Il montaggio del freno meccanico su di un albero o su l’altro provoca effetti differenti; un disco sull’albero a bassa velocità è costretto ad esercitare una coppia molto maggiore.
1.1.6
Meccanismo di yaw
Nelle turbine ad asse orizzontale è necessario allineare l’asse del rotore con il vento in modo da avere la massima efficienza. Per fare questo viene usato un sistema elettrico o idraulico che orienta tutta la navicella; tale sistema viene comandato tramite un segnale proveniente da uno strumento solitamente posto in cima alla navicella.
1.1.7
Generatore elettrico
Il generatore converte l’energia meccanica in energia elettrica da immettere sulla rete elettrica. L’efficienza di un generatore elettrico diminuisce sensibilmente se ci si sposta dalla sua potenza nominale verso potenze inferiori, per cui, considerando le velocità aleatorie del vento e di conseguenza le diverse potenze generate, è necessario prevedere un sistema che garantisca delle buone efficienze alle basse velocità di rotazione.
Il generatore più comune per questo tipo di applicazioni è il generatore asincrono che presenta semplicità costruttiva e buona robustezza. Il generatore sincrono può essere utilizzato occasionalmente soprattutto per la trasmissione diretta.
Possono essere usati due tipi di generatori : a velocità costante e a velocità variabile.
Velocità costante: in questa tipologia di generatore è possibile regolare la potenza in due
modi: il sistema meno comune richiede l’utilizzo di due generatori, uno dei quali lavora alle basse velocità del vento, mentre l’altro alle alte velocità; il più comune invece è attraverso un generatore a numero di poli variabili.
Velocità variabile: questa tipologia di generatore presenta molti vantaggi perché permette
di lavorare in condizioni di alta efficienza per un range ampio di velocità del rotore; inoltre alle basse velocità del vento la turbina può girare a velocità minori e quindi produce meno rumore.
2
MODI PROPRI DI VIBRARE E TECNICHE
DI CONDENSAZIONE
In questo capitolo verranno introdotte in un primo momento, le equazioni che permettono di trovare i modi naturali di un corpo e le frequenze corrispondenti, che saranno utili per comprendere meglio le analisi modali condotte nel capitolo 5 e la metodologia delle sottostrutture.
Questa metodologia risulta molto utile per la modellazione delle strutture complesse, e verrà utilizzata per la turbina eolica, che a causa della sua complessità si presta molto bene a questo tipo di operazione. Il metodo delle sottostrutture verrà quindi descritto nella seconda parte del capitolo.
2.1
VIBRAZIONI NATURALI
In un sistema ideale vibrante che presenta n gradi di libertà, le equazioni che descrivono il moto libero in assenza di smorzamento, possono essere scritte in forma matriciale nel seguente modo (A. Dimarogonas)
0 ] [ ] [ .. = + K x x M
dove [M] è la matrice delle masse, [K] è la matrice di rigidezza e [x] il vettore spostamento, e dove le matrici M e K sono sempre simmetriche a parte rari casi.
) cos( t z x= ω dove = n x x x x . . . 2 1 ; = n z z z z . . . 2 1
Sostituendo la “soluzione esplorativa” nell’equazione del moto si ottiene il sistema di equazioni algebriche lineari
0 ) (− 2 + = z K M
ω
per avere la soluzione non banale è necessaria la condizione
0
2 + =
−ω M K
Questa è un equazione algebrica in
ω
, che dà n radici ω1,ω2....ωn, che corrispondono alle frequenze naturali del sistema. Per ogni frequenza esiste un modo di vibrare della struttura associato, rappresentabile come = ) 1 ( ) 1 ( 2 ) 1 ( 1 ) 1 ( . . n z z z
= ) 2 ( ) 2 ( 2 ) 2 ( 1 ) 2 ( . . n z z z
z relativo all’autovalore (frequenza propria)
ω
2 = ) ( ) ( 2 ) ( 1 ) ( . . n n n n n z z z
z relativo all’autovalore (frequenza propria) ωn
Con questo metodo è possibile ottenere le frequenze e i modi di vibrare propri di una struttura, i quali dipendono entrambi solo dalle caratteristiche geometriche e inerziali del sistema.
Nei casi reali è necessario di solito anche considerare lo smorzamento del sistema. Per fare questo si introduce un termine aggiuntivo nell’equazione del moto, che diventa così :
0 ] [ ] [ ] [ . .. = + + C x K x x M
dove [C] è la matrice smorzamento. Possiamo assumere che la matrice smorzamento sia della forma [C] =
α
[M]+β[K], chiamato anche smorzamento di Rayleigh, doveα
e β sono due costanti da determinare.Per trovare la soluzione del sistema, è possibile provare una “soluzione esplorativa” del tipo
pt
Xe
x
=
Sostituendo nell’equazione del moto si ottiene
0 ] [p2M +pC+K X =
Quindi per trovare i modi di vibrare e le relative frequenze naturali del sistema diventa necessario trovare n autovalori ( p ) e autovettori ( X ) complessi. La condizione necessaria per la soluzione non banale è
0 2 + + = K pC M p
Trovando le radici p , si possono trovare analogamente al caso senza smorzamento le i
frequenze naturali e i modi di vibrare del sistema.
In questo caso la parte reale degli autovalori sarà lo smorzamento, mentre la parte immaginaria sarà la frequenza relativa all’autovalore in questione. Per quanto riguarda il segno della parte reale (e quindi dello smorzamento) esso è minore di zero nel caso che il sistema smorzi le vibrazioni, è al contrario positivo nel caso che il sistema non presenti smorzamento, ma amplifichi invece le vibrazioni.
2.1.1
Calcolo dei coefficienti della matrice di smorzamento di Rayleigh
Come già citato in precedenza, la matrice di smorzamento può essere espressa come combinazione lineare delle matrici di massa e rigidezza del sistema, moltiplicate per due opportuni coefficienti (Guida di Ansys).
La forma della matrice utilizzando il metodo di Rayleigh è quindi
[ ] [ ] [ ]
C
=
α
M
+
β
K
i valori di
α
e β non sono solitamente noti, ma possono essere calcolati tramite il valore di ξi, cioè il rapporto tra lo smorzamento relativo all’autovalore attuale e lo smorzamento critico.Se ωi è la frequenza naturale relativa al modo di vibrare i-esimo, allora
α
e β possono2
2
i i iβω
ω
α
ξ
=
+
Per calcolare nei casi pratici entrambi i coefficienti, per un rapporto di smorzamento noto
ξ, si assume che la somma del termine dell’equazione relativo ad
α
con quello relativo a β, sia costante in un intervallo di frequenze note ωi- ωj .Questo permette, una volta assegnato il valore del rapporto di smorzamento e delle frequenze, di risolvere simultaneamente due equazioni per i coefficienti . La figura riporta gli andamenti di
α
e β in un intervallo di frequenze noto.Figura 2-1 Andamento dei coefficienti
α
e β2.2
ANALISI CON LE SOTTOSTRUTTURE
Il metodo di analisi con le sottostrutture dinamiche utilizza la tecnica di riduzione delle dimensioni delle matrici di massa, rigidezza e smorzamento di un sistema con molti gradi di libertà (DOFs ) per portarlo ad un numero minore di gradi di libertà senza perdere informazioni considerevoli sul comportamento dinamico del sistema. Questa tecnica può
essere utilizzata per qualsiasi tipologia di analisi, comprese anche l’analisi modale, armonica e transitoria (Guida di Ansys; Craig R.R., Bampton M.C.).
Come già citato in precedenza, questo metodo si può applicare con successo a strutture particolarmente complesse o che sono composte da molti corpi, e sarà quindi applicato ad una turbina eolica, in modo da snellire la modellazione e velocizzare i calcoli.
La metodologia è composta da tre passi logici principali: - Generation pass
- Use pass - Expansion pass
Il primo passo corrisponde a dividere la struttura considerata in varie parti modellandole separatamente; tali parti vengono chiamate sottostrutture o superelementi. In seguito vengono determinate le matrici ridotte per ciascuna sottostruttura condensando tutte le caratteristiche del corpo sui gradi di libertà di interfaccia (Master), tra il superelemento considerato e gli altri con i quali è collegato. Sui nodi associati ai gradi di libertà Master verranno condensate tutte le “informazioni” relative alla sottostruttura considerata, comprese anche le matrici di massa, rigidezza, smorzamento e carichi assegnati.
Successivamente attraverso lo Use pass, è possibile ricomporre il sistema attraverso le varie matrici di ogni singolo superelemento, combinandole, e trovare la soluzione desiderata per l’intero corpo.
Con l’ultimo passo logico (expansion pass) è invece possibile espandere la soluzione trovata per l’intero sistema e condensata sui nodi di interfaccia ad ogni singolo corpo, in modo da poter fare analisi più dettagliate.
Si ottengono molteplici benefici utilizzando questo tipo di modellazione: I benefici di usare questo tipo di modellazione sono molteplici:
- la modellazione risulta più snella perché ogni componente viene modellato singolarmente
- la soluzione numerica del sistema globale è più veloce perché il calcolatore deve risolvere solamente le equazioni relative alle matrici dei nodi di interfaccia, che sono di ordine minore rispetto a quelle dell’intero corpo
- non si rende necessario cambiare l’intero modello nel caso di eventuali modifiche ad uno o più componenti, ma si può agire solo sui componenti in questione
- l’errore numerico sui risultati è molto piccolo se le interfacce sono state ben modellate, e quindi non si perde in accuratezza rispetto al metodo tradizionale.
Esiste inoltre la possibilità di una modellazione mista, e cioè fatta sia di superelementi con matrici ridotte, sia di modelli FEM tradizionali. Questo metodo di operare risulta utile nei casi si voglia studiare un solo corpo senza eseguire alcun passo di espansione, mantenendo inalterate le caratteristiche della struttura.
2.2.1
Analisi statiche
Consideriamo la forma di base dell’equazione statica per ogni singola sottostruttura (anche detta superelemento)
[ ]
K
( ) ( )
u
=
F
i
F
è la forza calcolata per ogni singolo nodo, ed include gli effetti di pressione e di temperatura. Questa equazione può essere scritta per due diversi tipi di nodi : i nodi master(quelli che mantengono i loro gradi di libertà) indicati con il pedice m, e i nodi slave (dove
verranno eliminati i DOFs) indicati con s.
[ ][ ]
[ ][ ]
=
s m s m ss sm ms mmF
F
u
u
K
K
K
K
oppure espandendo[ ]
( )
[ ]
( ) ( )
[ ]
sm( )
m[ ]
ss( ) ( )
s s m s ms m mmF
u
K
u
K
F
u
K
u
K
=
+
=
+
I gradi di libertà master, dovranno includere i DOFs di ogni nodo che si trova all’interfaccia tra due diverse sottostrutture. Risolvendo il sistema di equazioni precedenti su
s
u
( )
u
s[ ]
K
ss( )
F
s[ ] [ ]
K
ssK
sm( )
u
m 1 1 − −−
=
e sostituendo nell’equazione precedente
[ ] [ ][ ] [ ]
[
K
mmK
msK
ssK
sm]
( ) ( )
u
mF
m[ ][ ]
K
msK
ss( )
F
s 1 1 − −=
−
−
che può essere scritto come
[ ]
'( ) ( )
' 'F
u
K
=
con[ ]
[
[ ] [ ][ ] [ ]
]
( )
( )
( )
( )
m[ ][ ]
ms ss( )
s m sm ss ms mmF
K
K
F
F
u
u
K
K
K
K
K
1 ' ' 1 ' − −−
=
=
−
=
dove[ ]
'K e
( )
F' sono la matrice rigidezza e il vettore dei carichi del superelemento considerato, e( )
u
'=
( )
u
m il vettore spostamento relativo ai nodi master.In questa analisi , i carichi sono stati trattati come se ci fosse solo un vettore di carico. Gli stessi risultati possono essere ottenuti applicando qualunque numero di vettori carico indipendenti, come per esempio carichi termici, pressione o altro. È possibile fare questo espandendo i due vettori
( )
F come segue( )
( )
( )
∑
( )
∑
= ==
=
N i si s N i mi mF
F
F
F
1 1dove N è il numero di vettori carico indipendenti. Operando come in precedenza e sostituendo queste ultime espressioni di
( )
F si ottiene infine( )
∑
( )
∑
( )
[ ][ ]
∑
( )
= − = =−
=
=
N i si ss ms N i mi N i iF
K
K
F
F
F
1 1 1 1 ' '2.2.2
Analisi in regime transitorio
La forma generale dell’equazione del moto nel caso transitorio è
[ ]
[ ]
[ ]
'( ) ( )
' ' . ' ' .. ' 'F
u
K
u
C
u
M
+
=
+
dove
( )
F e '[ ]
K devono essere calcolati come nell’analisi statica. Per la matrice delle 'masse ridotta invece è possibile usare la forma proposta da Guyan (Guyan, R. J.). Questa forma risulta molto conveniente, considerato che la matrice di massa sarebbe funzione delle derivate temporali degli spostamenti, e di conseguenza molto difficile da trattare (nonché oneroso dal punto i vista computazionale) :
[ ]
M
[
M
mm] [ ][ ] [ ] [ ][ ] [ ] [ ][ ] [ ][ ] [ ]
K
msK
ssM
smM
msK
ssK
smK
msK
ssM
ssK
ssK
sm 1 1 1 1 '=
−
−−
−+
− −[ ]
C
[ ] [ ][ ] [ ] [ ][ ] [ ] [ ][ ] [ ][ ] [ ]
C
mmK
msK
ssC
smC
msK
ssK
smK
msK
ssC
ssK
ssK
sm 1 1 1 1 '=
−
−−
−+
− −Per il resto è possibile operare esattamente come nel caso statico.
2.2.3
Component Modal Synthesis (CMS)
Questo metodo di procedere è spesso utilizzato nell’analisi con le sottostrutture, ed è stato sviluppato da Craig e Bampton.
Per i sistemi non smorzati, ogni sottostruttura CMS è definita attraverso una matrice di massa e di rigidezza. L’equazione matriciale del moto risulta quindi :
[ ]
M
u
+
[ ]
K
( ) ( )
u
=
F
..Partizionando l’equazione matriciale in gradi di libertà all’interfaccia e gradi di libertà interiori si ottiene
( )
[ ]
[ ]
=
=
=
ss sm ms mm ss sm ms mm s mK
K
K
K
K
M
M
M
M
M
u
u
u
;
;
Dove come in precedenza il pedice m sta per grado di libertà master, e s sta per ogni DOFs che non è master.
Il vettore spostamento
( )
u , può essere rappresentato attraverso delle coordinategeneralizzate in questo modo :
( )
[ ]
=
=
δy
u
T
u
u
u
m s mdove
y
δ è il sistema di coordinate modali generalizzate che rappresentano il numero di gradi di libertà al quale voglio ridurre i nodi slave, e[ ]
T è la matrice di trasformazione relativa a questo cambio di coordinate.Se l’interfaccia tra le sottostrutture è fissa, allora la matrice di trasformazione ha la forma
[ ]
[ ] [ ]
[ ] [ ]
=
s smG
I
T
φ
0
dove[ ]
φ
s = modi normali della sottostruttura, calcolati con le interfacce fissate (autovettoriottenuti con i nodi all’ interfaccia fissata)
[ ]
I
= matrice identità[ ] [ ] [ ]
G
smK
ssK
sm 1 −−
=
Questa matrice è ottenuta azzerando nell’equazione statica il termine delle forze relativo ai nodi interni, e risolvendo l’equazione di u . s
Le equazioni relative a questa trasformazione sono :
[ ][ ]
[ ][ ]
=
s m s m ss sm ms mmF
F
u
u
K
K
K
K
dove espandendo[ ]
K
sm( )
u
m+
[ ]
K
ss( ) ( )
u
s=
F
s=
0
( )
u
s=
−
[ ] [ ]
K
ssK
sm( )
u
m=
[ ]
G
sm( )
u
m −1Se invece si sta utilizzando un interfaccia libera, allora la matrice di trasformazione assume questa forma
[ ] [ ]
[ ]
[ ]
[ ]
[ ]
[ ]
=
0
0
' s sr smG
I
T
φ
φ
[ ]
φ
sr = matrice di inerzia dalla quale si estraggono i modi[ ]
φ
s=
[ ] [ ][ ]
φ
s−
G
smφ
m'
[ ]
φ
m = autovettori ottenuti con i gradi di libertà all’interfaccia liberi.Per quanto riguarda invece il vettore forze, con le trasformazioni applicate esso sarà pari a
( )
F
'=
[ ]
T
T( )
F
Dopo aver applicato la trasformazione con la matrice
[ ]
T , le matrici ridotte di massa e rigidezza della sottostruttura CMS , saranno uguali a :[ ]
[ ] [ ][ ]
[ ]
[ ] [ ][ ]
[ ]
[ ]
[ ]
[ ]
=
=
=
δδK
K
T
K
T
K
T
M
T
M
mm T T0
0
' ' 'dove
[ ]
K
mm' sarà la partizione della rigidezza ottenuta tramite il metodo di Guyan, e[ ] [ ] [ ][ ]
ss s Ts
K
K
δδ=
φ
φ
Infine dopo aver ridotto il sistema ad uno equivalente tramite le trasformazioni effettuate, i gradi di libertà master, verranno utilizzati per accoppiare il superelemento CSM (sottostruttura), ad altri elementi o superelementi .
Sommando le matrici calcolate per tali gradi di libertà alle interfacce tra due sottostrutture, è possibile ricostruire il sistema nella sua interezza, con le sue matrici di massa e rigidezza totali (anche se di ordine ridotto).
Fatto questo sarà possibile condurre delle analisi sia modali che transitorie, ed ottenere i risultati per ogni singolo superelemento.
3
TEORIA DEI GENERATORI EOLICI
Nel seguente capitolo verranno introdotte le equazioni della teoria BEM (Blade Element Momentum theory) che permettono di trovare attraverso una procedura iterativa, quali sono i carichi aerodinamici che per una determinata condizione di vento, si vanno a distribuire sulle pale.
Inoltre considerato che la turbina si innalza per oltre 140 m da terra, verrà anche introdotto il concetto di ABL (Atmosferic Boundary Layer), che permette di prevedere, con buona approssimazione, come varia il profilo di velocità del vento con la quota.
L’andamento dei carichi calcolati tramite la procedura iterativa è mostrato nel capitolo 6, nel quale vengono anche riassunti brevemente i passi della procedura, con le ipotesi sotto le quali il lavoro è stato eseguito. Questi carichi, verranno successivamente utilizzati nello stesso capitolo per condurre delle simulazioni dinamiche transitorie sulla singola pala.
3.1
LA TEORIA DEL MOMENTO E IL LIMITE DI BETZ
Una turbina eolica estrae energia cinetica dal vento che passa attraverso il rotore, e a causa di questo diminuisce la sua velocità. Assumendo che la massa d’aria che viene rallentata dal rotore possa essere isolata dal resto che passa all’esterno e che quindi non viene rallentato, è possibile tracciare una traiettoria circolare che estesa a valle e monte assume la forma di un tubo (anche detto disco attuatore) a sezione circolare (Burton T., Sharpe D., Jenkins N.,
Se ipotizziamo che non ci sia scambio d’aria attraverso questa superficie, è necessario, a causa del rallentamento dell’aria interna, che la sezione del tubo si allarghi, in modo da compensare il rallentamento dell’aria .
Figura 3-1 Esempio di rotore come disco pieno
Considerando il rotore come un disco pieno, con U la velocità del vento sull’asse di d
rotazione del rotore, U∞ la velocità del vento incidente sul rotore e U la velocità a valle del w
rotore, possiamo scrivere per il teorema di conservazione della massa:
w w d dA U A U A U ρ ρ ρ ∞ ∞ = =
equazione dalla quale, introducendo il fattore di induzione assiale
d d A A A a= − ∞ , possiamo ricavare ) 1 ( a U Ud = ∞ −
Figura 3-2 Andamento della pressione e velocità dell’aria durante l’attraversamento del disco attuatore
3.1.1
Teoria della quantità di moto
Possiamo esprimere la variazione della quantità di moto assiale dell’aria come
d d w
A
U
U
U
dM
=
(
∞−
)
ρ
La forza che causa questa variazione della quantità di moto è interamente dovuta alla differenza di pressione che c’è tra valle e monte del disco attuatore; il valore netto di queste forze di pressione si può esprimere come
)
1
(
)
(
)
(
P
d+−
P
d−A
d=
U
∞−
U
wρ
A
dU
d−
a
Per valutare questa differenza di pressione possiamo usare l’equazione di Bernoulli sia a monte che a valle del disco (questo perché l’energia totale del fluido è diversa nelle due sezioni) . A monte del disco possiamo scrivere
+ ∞ ∞ ∞ ∞ ∞
U
+
ρ
gh
+
p
=
ρ
dU
d+
ρ
dgh
d+
p
dρ
2 22
1
2
1
.Assumendo che il fluido sia incomprimibile e che il flusso sia orizzontale l’equazione si semplificherà in questo modo:
+ ∞ ∞
+
p
=
U
d+
p
dU
2 22
1
2
1
ρ
ρ
e analogamente a valle del disco:
− ∞
=
+
+
d d wp
U
p
U
2 22
1
2
1
ρ
ρ
Sottraendo le due equazioni troviamo la differenza di pressione cercata
) ( 2 1 2 2 w d d P U U P+ − − =
ρ
∞−Inserendo questa espressione nell’equazione precedente possiamo trovare
) 1 ( ) ( ) ( 2 1 2 2 a U A U U A U U∞− w d = ∞− w
ρ
d ∞ −ρ
che corrisponde ad avere
∞
−
=
a
U
U
w(
1
2
)
Sostituendo quindi questa espressione di U nell’equazione precedente possiamo w
esprimere la risultante della forza che fa variare la quantità di moto come
2
)
1
(
2
−
∞=
A
a
a
U
F
ρ
dmentre il lavoro fatto per unità di tempo da questa forza (concentrata nel disco) può essere espresso come
)
1
(
a
FU
FU
W
=
d=
∞−
E’ possibile ora definire il coefficiente di potenza come 2 3
)
1
(
4
2
1
a
a
A
U
W
C
d p=
=
−
∞ρ
dove il denominatore sta a rappresentare la potenza massima estraibile dall’aria
3.1.2
Il limite di Betz
E’ possibile, derivando rispetto ad a ed uguagliando a zero l’espressione, trovare il massimo del coefficiente di potenza
0
)
3
1
)(
1
(
4
−
−
=
=
a
a
da
dC
pche corrisponde ad un valore di 3 1 =
a questo valore è chiamato limite di Betz e rappresenta un parametro di massimo “rendimento” per una turbina eolica. Il valore massimo del coefficiente di potenza in queste condizioni diventa pari a
27
16
=
p
C
3.2
LA TEORIA DEL DISCO ROTANTE
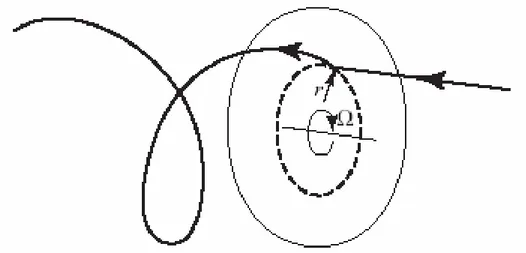
Per fare una trattazione completa della teoria delle turbine eoliche, è necessario considerare oltre alla velocità assiale anche la variazione del momento della quantità di moto dell’aria, la quale sarà responsabile della coppia applicata sul rotore. Per descrivere questo
fenomeno si introduce un fattore di induzione tangenziale della velocità a’, analogamente al caso assiale.
Per poter trovare entrambi i fattori di induzione della velocità (assiale a e tangenziale 'a )
consideriamo una parte di disco rotante alla velocità
ω
a forma di corona circolare di raggio r e spessore pari a dr.Figura 3-3: traiettoria di una particella d’aria attraverso il disco rotante
La coppia generata sull’anello del disco sarà pari alla variazione del momento angolare dell’aria passante per l’anello.
2 '
2
)
1
(
a
a
r
U
dA
dT
=
ρ
d ∞−
ω
d T = variazione di momento angolare
dove dA è l’area dell’anello considerato. La potenza estratta sarà d
dT
dP
=
ω
.La potenza totale estratta dal vento a causa del suo rallentamento sarà anche determinata dalla variazione della sua quantità di moto assiale per cui possiamo uguagliare
2 3
)
1
(
2
dA
U
a
a
dP
=
ρ
d ∞−
2 ' 2 2 32
)
1
(
)
1
(
2
ρ
dA
dU
∞a
−
a
=
ρ
dA
dU
∞−
a
ω
a
r
ottenendo dopo le semplificazioni
2 ' 2 2
)
1
(
a
a
r
a
U
∞−
=
ω
. Chiamando ∞=
U
r
ω
λ
parametro di velocità locale (oppure quando r = R parametro di velocità di punta), otteniamo' 2
)
1
(
a
a
a
−
=
λ
L’area dell’anello sarà
dA
d=
2
π
rdr
, quindi l’incremento di potenza all’albero sarà pari a2 ' 3 ) 1 ( 4 ) 2 2 1 (
ρ
π
λ
ω
U rdr a a dQ dP = = ∞ −dove il termine in parentesi rappresenta il flusso di potenza passante attraverso l’anello mentre il termine fuori dalla parentesi rappresenta l’efficienza della pala nel “catturare l’energia”.
In termini di coefficiente di potenza possiamo scrivere
2 2 ' 2 3 2 ' 3
)
1
(
8
2
1
)
1
(
4
R
r
a
a
R
U
r
a
a
U
dr
dC
pλ
πρ
λ
πρ
−
=
−
=
∞ ∞e conoscendo come variano a e 'a con il raggio1 è possibile integrare questa espressione per trovare il coefficiente di potenza, per il quale è possibile calcolare il valore massimo che corrisponderà al limite di Betz.
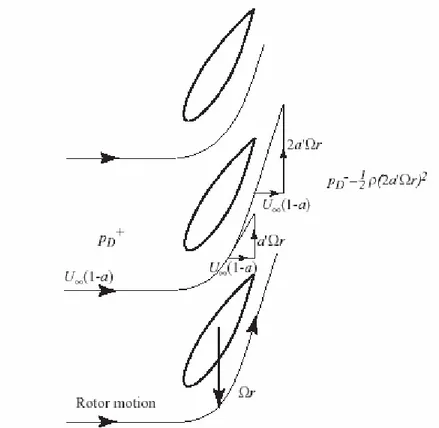
Ovviamente le turbine reali non possono raggiungere questo valore del coefficiente di potenza per vari motivi. Il più importate è che non operano come un disco pieno, equivalente ad avere infinite pale, ma operano con un numero finito di pale, inoltre ci sono perdite di energia a causa del drag lungo tutto l’arco della pala, in particolare alla radice e sulla punta delle pale.
Figura 3-4 incremento della velocità tangenziale dell’aria attraverso il disco rotante
1 I coefficienti di induzione assiale e tangenziale si ricavano una volta note le caratteristiche del profilo alare
3.3
TEORIA BEM (blade element-momentum theory)
Con questa teoria applicata ad un profilo alare noto è possibile prevedere quali saranno le forze di lift e di drag2 sul singolo elemento di pala (ad una posizione r, di lunghezza dr e corda c) e di conseguenza anche su tutta la pala. E’ assunto che queste forze possano essere calcolate una volta noto il profilo alare bidimensionale, trascurando gli effetti tridimensionali e la velocità in senso radiale (non ci sono interazioni radiali nel flusso d’aria). Inoltre viene ipotizzato che l’unica causa di cambiamento della quantità di moto dell’aria è la forza scambiata con l’elemento di pala.
Consideriamo una turbina di N pale di lunghezza R, ciascuna con corda c e angolo di twist
β misurato tra la linea dello zero del profilo alare e il piano di rotazione del rotore. Sia la corda che l’angolo di twist possono variare lungo la pala.
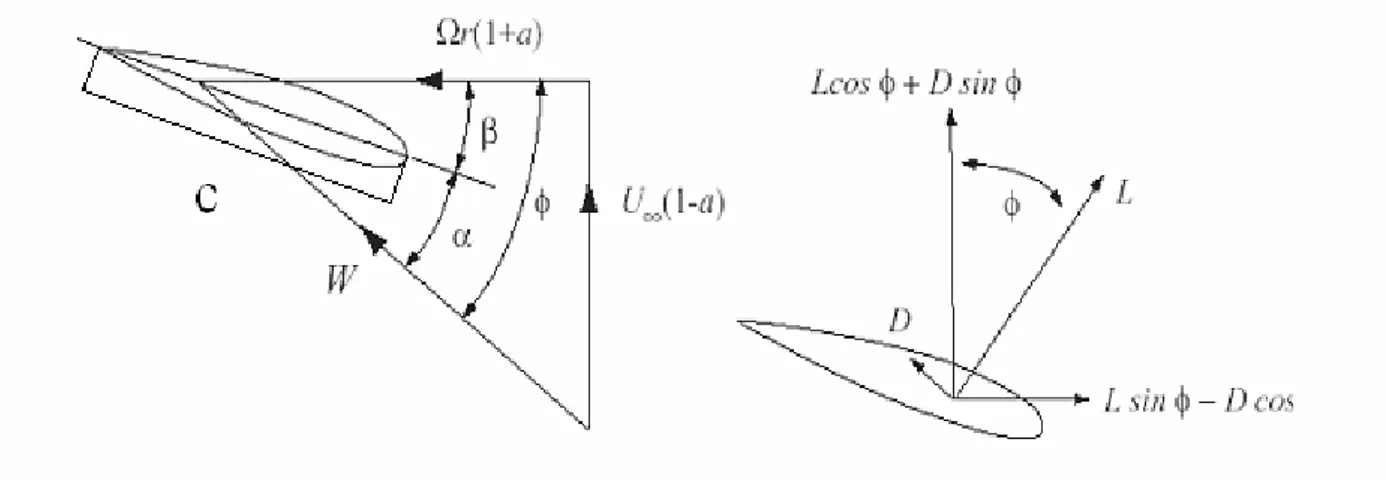
Come si può vedere dalla figura , la velocità tangenziale vista dal flusso d’aria sarà la combinazione della velocità del rotore Ωr e della velocità tangenziale di scia Ωra' e quindi la velocità sul singolo elemento di pala sarà Ωr(1+a'). La velocità in senso assiale, come già detto precedentemente, è pari a U∞(1−a).
Sommando vettorialmente la velocità relativa sull’elemento di pala è
2 ' 2 2 2 2 ) 1 ( ) 1 ( a r a U W = ∞ − +Ω +
definito l’angolo φ come l’angolo tra la velocità W e l’asse di rotazione del rotore e l’angolo
α
come angolo di attacco, possiamo scrivere
2 Le forze di lift e di drag sono le componenti rispettivamente in direzione ortogonale e parallela alla velocità
W
a
U
(
1
)
sin
φ
=
∞−
W
a
r
(
1
)
cos
'+
Ω
=
φ
con l’angolo di attacco definito da
β
φ
α
=
−
Figura 3-6 angoli e forze sull’elemento di pala
.
La forza di lift perpendicolare a W e la forza di drag parallela a W, su un elemento di lunghezza dr saranno rispettivamente
l
cdrC
W
dL
22
1
ρ
=
dcrdrC
W
dD
22
1
ρ
=
dove C e l C sono rispettivamente i coefficienti di lift e drag , che dipendono dal tipo di d
profilo alare e dall’angolo di attacco.
La componente assiale della forza su una pala con n elementi sarà di conseguenza
)
sin
cos
(
2
1
sin
cos
φ
dD
φ
ρ
W
2cndr
C
lφ
C
dφ
dL
+
=
+
mentre il tasso di variazione della quantità di moto assiale dell’aria passante per l’anello circolare descritto dal movimento di un elemento di pala è
rdr
a
a
U
aU
rdr
a
U
∞(
1
−
)
2
π
2
∞=
4
πρ
∞2(
1
−
)
ρ
E’ inoltre necessario considerare la forza dovuta alla variazione di pressione causata dalla zona di scia, che è pari a
rdr
r
a
π
ρ
(
2
)
2
2
1
'Ω
2In totale la forza aerodinamica in direzione assiale sarà
[
U
a
a
a
r
]
rdr
dr
ncC
W
2 x4
2(
1
)
(
')
22
1
Ω
+
−
=
πρ
∞ρ
dove con C è stato chiamato il termine x
C
lcos
φ
+
C
dsin
φ
. Semplificando e ponendoR
r
=
µ
e ∞ Ω = U R λ si ottieneη
λµ
π
(
(
1
)
(
)
)
8
' 2 2 2a
a
a
C
R
c
n
U
W
x=
−
+
∞Analogamente è possibile ragionare per la variazione infinitesima di momento torcente causata dalla forza aerodinamica sugli elementi di pala:
rdr ncC W r dD dL 2 y 2 1 ) cos sin (
φ
−φ
=ρ
avendo chiamato Cy =(Clsinφ−Cdcosφ). La variazione infinitesima della coppia, causata dell’aria passante attraverso l’anello sarà
dr r a r a U rdr r a r a U∞(1− )Ω 2 ' 2
π
=4πρ
∞ '(Ω )(1− ) 2ρ
Uguagliando le due equazioni e introducendo le definizioni di λ e µ si ottiene infine
λ
µ
πλ
' 2 2 2)
1
(
8
a
a
C
R
c
n
U
W
y=
−
∞Risolvere questa ultima equazione e la precedente per trovare i valori dei due fattori di induzione a ed a usando un profilo alare bidimensionale, richiede un processo iterativo. Le '
equazioni possono essere poste in questa forma:
−
=
−
φ
σ
φ
σ
2 2 2sin
4
sin
4
1
r y x rC
C
a
a
φ
φ
σ
cos
sin
4
1
' y rC
a
a
=
+
dove il parametro
σ
r è la solidità della corda, definita come un parametro proporzionalealla lunghezza totale della corda ad un determinato raggio e diviso la lunghezza di una circonferenza dello stesso raggio.
π
σ
r
Nc
r2
=
Calcolati i fattori di induzione, è possibile trovare la forze di lift e drag agenti sulla pala, e di conseguenza anche la coppia e la potenza generate.
3.4
CURVE CARATTERISTICHE DI UN GENERATORE EOLICO
Tutti i generatori eolici presentano una curva di potenza simile a quella riportata in figura, dalla quale si evince che la potenza generata varia con la velocità del vento incidente sul rotore.
Nella curva si possono individuare tre zone ben distinte: la prima dove la velocità del vento è minore della velocità di cut in (in questo caso circa 4 m/s), in cui non si genera energia perché la pala è in stallo.
La seconda zona è quella nella quale la potenza generata cresce proporzionalmente alla velocità del vento al cubo. Infine nell’ultima zona la potenza generata è costante (questa rappresenta la condizione di regime), e il rotore è in parte frenato, per non raggiungere velocità eccessive di rotazione,fino a che non si raggiunge la velocità di cut off, alla quale il rotore viene bloccato o lasciato girare liberamente senza carico resistente.
Figura 3-8 curva di potenza caratteristica di un generatore eolico
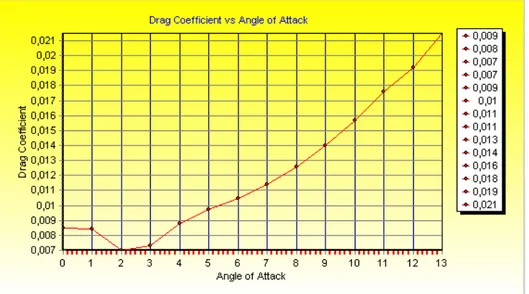
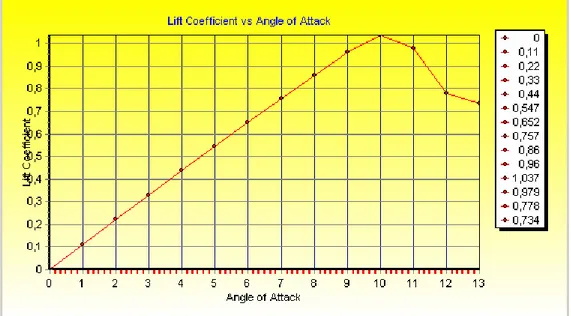
Le curve per i coefficienti di lift e di drag dipendono invece dal profilo alare considerato e tipicamente sono in funzione dell’angolo di attacco
α
.Un esempio di curve tipiche per i coefficienti aerodinamici è riportato nelle seguenti figure :
Figura 3-10 Esempio di coefficiente di lift in funzione dell’angolo di attacco
3.5
CONDIZIONI AMBIENTALI
Per poter simulare accuratamente il comportamento sia statico che dinamico di una turbina eolica è necessario conoscere una distribuzione realistica del campo di moto del vento. In particolare è necessario conoscere la velocità media del vento, la sua direzione, le sue fluttuazioni giornaliere e stagionali e la variazione di velocità con l’altezza. Per fare questo si ricorre a codici commerciali che tendono a riprodurre il modello dello strato limite ambientale.
3.5.1
Strato limite ambientale
Negli strati più bassi dell’atmosfera le masse d’aria in movimento risentono dell’influenza del suolo sottostante. Le particelle d’aria che fluiscono sopra la superficie terrestre vengono rallentate da questa, in maniera tanto maggiore quanto più ci si avvicina al suolo, fino ad arrivare ad una condizione di velocità nulla per quelle a diretto contatti con il terreno. Pertanto
la velocità del vento diminuisce progressivamente con l’avvicinarsi al suolo per effetto dell’attrito dell’aria con la superficie terrestre. Lo spessore di atmosfera all’interno del quale questo effetto di rallentamento è sensibile si chiama STRATO LIMITE AMBIENTALE (Atmosferic Boundary Layer ABL).
Figura 3-11 altezza di gradiente per varie conformazioni del terreno
Nello strato limite ambientale la velocità media del vento aumenta con la quota fino ad un’altezza oltre la quale il suo valore si mantiene costante; questa quota viene chiamata
ALTEZZA DI GRADIENTE (δ) e definisce l’altezza dell’ABL. L’altezza di gradiente non è
costante e dipende, in primo luogo, dalla velocità dell’aria e dal tipo di terreno su cui essa fluisce; per luoghi con piccole asperità, quali zone desertiche o superfici del mare, lo strato limite ambientale arriva ad altezze di circa 300 metri mentre per regioni a elevata rugosità, come zone fortemente urbanizzate, si arriva a valori di circa 500 metri. Tali valori si
riferiscono a condizioni di stabilità termica atmosferica, ovvero situazioni in cui sono assenti i gradienti termici verticali dell’aria o comunque, sono inferiori a –1 °C ogni 100 metri di salita.
L’impatto tra il flusso d’aria ed il suolo dà origine a vortici di varie dimensioni che si muovono in tutte le direzioni, anche se prevalentemente seguono la direzione principale del vento. Pertanto la velocità istantanea del vento sarà data da un termine medio (costante nel tempo e presente nella direzione principale del vento), che tiene conto del flusso principale e da un altro termine di valore medio nullo, che caratterizza la parte fluttuante di velocità, che è legato alla presenza dei vortici e che va computato in ogni direzione; quest’ ultimo termine varia casualmente nel tempo e nello spazio e viene trattato come un processo stocastico stazionario a valore medio nullo.
U(P,t)= Um(z)+u’(x,y,z,t)
V(P,t)= v’(x,y,z,t)
W(P,t)= w’(x,y,z,t)
dove Um, è il valore medio della velocità nella direzione principale e u’,v’,w’ la parte fluttuante.
La velocità del vento è funzione del tempo e del luogo preso in considerazione; in particolare, la Um per un determinato sito dipende soltanto dalla quota, mentre le componenti di velocità medie nelle direzioni Y e Z sono nulle; al contrario, le componenti istantanee di velocità vanno considerate tutte, poiché queste sono associate alla parte turbolenta del flusso, ossia alla turbolenza atmosferica, che ha caratteristiche tridimensionali.
3.5.2
Velocità media del vento
È possibile determinare il profilo verticale di velocità media del vento presente in un determinato luogo; per fare questo è necessario conoscere i valori della velocità media
(orizzontale) del vento alle varie quote (da 0 metri fino all’altezza di gradiente). Quando non si hanno a disposizione questi dati sperimentali è possibile usufruire di apposite formule che, sotto opportune ipotesi semplificative, esprimono la relazione che c’è tra la velocità media del vento e l’altezza dal suolo e quindi descrivono l’andamento dell’ABL.
Le principali formule che esprimono l’andamento di velocità media in funzione della quota sono due: la legge esponenziale e la legge logaritmica.Tali leggi descrivono, accuratamente, l’andamento del profilo verticale della velocità media del vento fino a quote di 100-200 metri dal suolo (ovvero nella parte più bassa dell’ABL, denominata Atmospheric Surface Layer ASL, che può essere quantificato come il primo 10% dell’ABL).
Legge esponenziale α = ⋅ ( ) ( rif ) rif z U z U z z
Relazione di tipo sperimentale. U = velocità del vento [m/s],
z = altezza a cui si vuole calcolare la velocità del vento, zrif = altezza di riferimento, in cui è nota la velocità,
α = esponente del profilo di velocità (è direttamente proporzionale alla rugosità del suolo).
Legge logaritmica = ⋅ * 0 ( ) u ln z U z k z Relazione teorico-sperimentale. U = velocità del vento [m/s],
z = altezza a cui si vuole calcolare la velocità del vento,
0
z = lunghezza di rugosità (dipende dal tipo di terreno),
u*= velocità di attrito,
La lunghezza di rugosità (z ) è il parametro che caratterizza la superficie su cui spira il 0
vento; maggiore è il suo valore maggiori saranno le asperità del terreno ed i conseguenti disturbi creati dal suolo al flusso ventoso.Fisicamente z può essere immaginata come la 0
dimensione del vortice turbolento che viene creato dall’ interazione del vento con il suolo. Il valore di z è stato standardizzato in base alle tipologie di terreno che più frequentemente si 0
4
MODELLAZIONE DELLA TURBINA
Per modellare e analizzare una turbina eolica è possibile agire in diversi modi: costruire un modello dell’intero sistema, oppure dividere il sistema in diverse parti che poi verranno interfacciate tra di loro tramite il metodo delle sottostrutture descritto in precedenza.
Considerata la complessità di una turbina eolica, in questo lavoro si è scelto di utilizzare il metodo delle sottostrutture, dividendo la turbina in sei parti: le tre pale, la torre, il mozzo, e infine la trasmissione con la navicella.
Per quanto riguarda la modellazione della geometria e della dinamica della struttura, sono stati presi a riferimento, i dati relativi ad una turbina da 5MW (Krogh T, 2004).
Potenza nominale 5 MW
Diametro del rotore 110 m
Massa di una pala 12700 Kg
Materiale delle pale Fibra di vetro
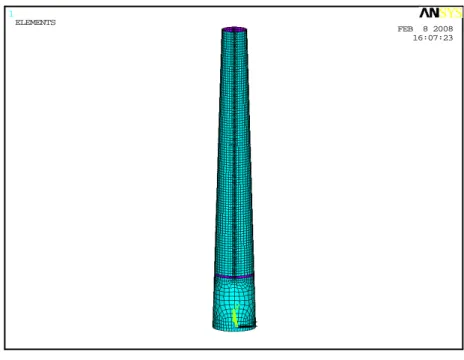
Tipo di torre Tubolare
Altezza della torre 85 m
Diametro alla base 6 m
Spessore alla base 80 mm
Materiale acciaio
In questo lavoro è stato scelto di utilizzare il programma Ansys, e quindi di eseguire una modellazione agli elementi finiti dei vari componenti della turbina. Tale metodo consiste nel modellare geometricamente un pezzo, per poi dividere il suo volume o la sua superficie in un certo numero di elementi sufficientemente piccoli da approssimare bene il corpo. Ad ogni elemento sono associati uno o più nodi, sui quali verranno risolte fino a convergenza, le equazioni numeriche relative alla soluzione cercata.
In appendice A sono riportate le caratteristiche degli elementi utilizzati durante la modellazione.
4.1
MODELLAZIONE DELLA PALA
E’ stato scelto un generatore tripala, con pale distanziate di 120 gradi l’una dall’altra e con corda iniziale pari a 2,5 metri. Il profilo è il NACA 63012.
La lunghezza di ogni singola pala è nel complesso di 55 metri, di cui 53 sono di profilo alare e 2 metri sono di collegamento con il mozzo; il materiale scelto per il collegamento è acciaio, mentre per la pala è stata utilizzata la fibra di vetro (E=1,4⋅1010N/m2;G=109 N/m2;
ρ=1700 Kg/m3). Il diametro esterno del collegamento di forma cilindrica è pari a 1,85 m, e il
suo spessore è di 80 mm, mentre lo spessore della pala è di 29 mm.
Si è scelto di dare un angolo di twist variabile lungo il profilo alare, che va da 13° a 0°; questo per fare in modo che l’angolo di attacco vari con il raggio della pala.
1
FEB 8 2008
15:47:23 ELEMENTS
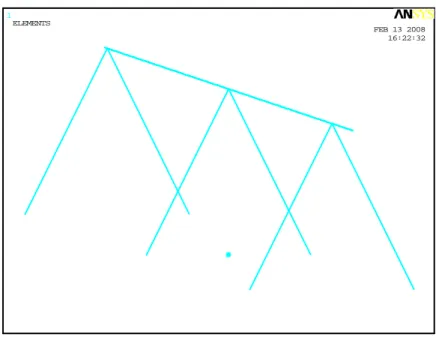
Figura 4-1 La modellazione della pala
Per simulare la struttura di rinforzo solitamente presente all’interno della pala, si è scelto di inserire una trave di acciaio a sezione quadrata cava e spessore costante collegata alla struttura in fibra di vetro lungo tutto il raggio. Il lato esterno della trave è pari a 200 mm mentre lo spessore è pari a 10 mm. Una volta generata la geometria, la pala stata viene discretizzata in elementi guscio shell43. La massa complessiva risulta di circa 12700 Kg senza considerare il collegamento cilindrico.
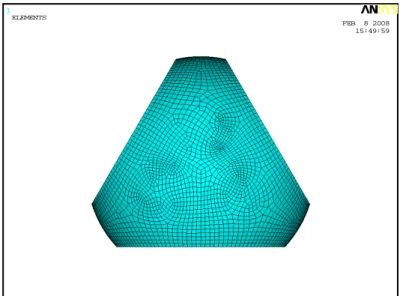
4.2
MODELLAZIONE DEL MOZZO
Per quanto riguarda il mozzo che collega le tre pale all’albero principale, esso è caratterizzato da una forma a guscio sferico, sulla quale sono stati intersecati dei piani di taglio, in modo da poter far corrispondere i collegamenti cilindrici delle pale con il guscio.