SCUOLA DI INGEGNERIA
UNIVERSITÀ DI PISA
CORSO DI LAUREA IN INGEGNERIA DELLE TELECOMUNICAZIONI Tesi di Laurea Magistrale
MONITORAGGIO COSTIERO CON RADAR HF:
STIMA DELLE CORRENTI SUPERFICIALI DAI DATI RADAR WERA DI SAN ROSSORE E PALMARIA
Relatori
Prof. Ing. Maria Sabrina Greco Prof. Ing. Fulvio Gini
Ing. Carlo Brandini Ing. Bartolomeo Doronzo
Candidato Letizia Costanza
Sommario
Introduzione...5
Capitolo1. Il radar HF: Ground-wave o surface-wave radar...10
1.1 Equazione fondamentale del radar...11
1.2 Fenomeno di Bragg: generazione del clutter marino...13
Capitolo2. CODAR e WERA...18
2.1 Tecniche di risoluzione spaziale...18
2.1.1 Risoluzione in range...18
2.1.2 Risoluzione in azimuth...19
2.2 Il radar WERA...22
Capitolo3. Stima delle correnti superficiali dai dati radar WERA di San Rossore e Palmaria...28
3.1 Caratteristiche tecniche dei radar WERA di San Rossore e Palmaria 28 3.2 Elaborazione dei dati...33
3.2.1 Sovracampionamento dei dati...40
3.2.2 Controllo sull'intervallo di frequenze in cui ricercare le linee di Bragg 43 3.2.3 Controllo sul valore massimo dei picchi...46
3.2.4 Controllo sulla variazione delle velocità radiali...48
Capitolo4. Creazione della mappa di corrente superficiale...50
Indice delle illustrazioni
Figura 1: Propagazione ground-wave e skywave...5
Figura 2: Mappa delle previsioni di corrente del mare di Toscana (LaMMA)...7
Figura 3: Conduttività dell'acqua in funzione della salinità per sei diverse temperature...11
Figura 4: Contributo dello scattering del mare nella banda HF...14
Figura 5: Tipico spettro di ampiezza di un radar HF ground-wave...15
Figura 6: Combinazione vettoriale delle correnti radiali di due siti radar...15
Figura 7: Tipico sito di installazione di un sistema WERA...20
Figura 8: Esempio di Beamforming. A destra: il pattern di antenna di un array lineare con 16 antenne con spaziatura di λ/2. A sinistra: è stata applicata una funzione finestra per ridurre i lobi laterali...21
Figura 9: Principio del beamforming: dopo i pesi “ai “ e gli shift di fase “jj “, i segnali delle n antenne vengono sommati insieme...22
Figura 10: Schema a blocchi del sistema WERA...23
Figura 11: Chirp lineare in frequenza che inizia a f0 con banda B e durata T. Dopo aver raggiunto la frequenza finale f0 + B, la fase del chirp inizia in modo continuo ancora da f0 ...24
Figura 12: Schema a blocchi del Direct Digital Synthesizer (DDS)...25
Figura 13: Copertura dei radar WERA di San Rossore e Palmaria...29
Figura 14: Il true North...30
Figura 15: Ricevitore WERA nella sua versione compatta...34
Figura 16: Ricevitore WERA nella versione array lineare...35 Figura 17: Periodogramma medio su 10 file; cella in range n.8, cella in azimuth
n.10 38
n.10 39
Figura 19: Periodogramma medio su 50 file; cella in range n.8, cella in azimuth
n.10 41
Figura 20: Periodogramma in funzione del range...42 Figura 21: Esempio di periodogramma in cui, grazie al controllo sulle
frequenze, non si considera il picco evidenziato in rosso, bensì, correttamente, quello in verde...44 Figura 22: Periodogramma in funzione del range – Stazione di Palmaria – 11/05/2009 h 14 - Cella in azimuth n.1...45 Figura 23: Esempio di periodogramma che supera il controllo sulla soglia...47 Figura 24: Esempio di periodogramma che supera il controllo sulla soglia...48 Figura 25: Esempio di periodogramma che non supera il controllo sulla
variazione delle velocità radiali...49 Figura 26: Copertura radar WERA di San Rossore e PAlamaria: griglie di punti in latitudine e longitudine...51 Figura 27: Area di intersezione delle coperture radar di San Rossore e Palmaria
52
Figura 28: In blu la griglia regolare in cui ciascun punto rappresenta il centro della cella in cui si andrà a calcolare la corrente superficiale...53 Figura 29: Rappresentazione vettoriale del calcolo della corrente...54 Figura 30: Mappa di corrente: implementazione del controllo sulle frequenze..57 Figura 31: Mappa di corrente: implementazione del controllo sulle frequenze e sul valore massimo dei picchi...58 Figura 32: Mappa di corrente: implementazione di tutti i tre controlli: controllo sulle frequenze, sul valore massimo dei picchi e sulla variazione delle velocità radiali 59
Figura 33: Periodogramma in funzione del range - San Rossore - Cella in
azimuth n. 67...60 Figura 34: Periodogramma in funzione del range - Palmaria - Cella in azimuth
Figura 35: In blu la griglia utilizzata per avere una migliore visualizzazione
delle mappe della corrente...62
Figura 36: Mappa di corrente h.14:00...63
Figura 37: Mappa di corrente h.19:00...64
Figura 38: Mappa di corrente h.21:00...65
Introduzione
Negli ultimi decenni i radar operanti nella banda delle alte frequenze ( High Frequency, HF), ovvero dai 3 ai 30 Mhz, si sono affermati sempre più come un'importante tecnica di monitoraggio della superficie del mare. Il crescente interesse per questi radar è dovuto al fatto che essi permettono, pur essendo posizionati a terra - lungo la costa, il telerilevamento di superfici situate a distanza molto maggiori dell'orizzonte radio, da qui la denominazione di radar OTH – Over The Horizon.
I radar OTH si distinguono in:
•ground-wave o surface-wave radar che sfruttano la propagazione delle
onde di superficie, primariamente utilizzati per applicazioni oceanografiche.
•ionospheric o skywave radar che sfruttano la propagazione
ionosferica: il segnale radio è riflesso dalla ionosfera per ispezionare aree distanti tra gli 800 e i 3000 Km dal radar usando frequenze tipicamente fra i 10 e i 20 Mhz.
In Figura 1 si mostra la propagazione ground wave e quella skywave:
Questa tesi si occuperà solo dei radar HF - ground wave o surface wave- ed in particolar modo della loro applicazione oceanografica. Questo lavoro nasce infatti dalla collaborazione con il Consorzio LaMMA (Laboratorio per la Modellistica e la Meteorologia Ambientale) che svolge attività di ricerca e servizio di supporto al monitoraggio ambientale marino, con particolare riferimento alle caratteristiche fisiche del mare (onde, correnti, temperatura, salinità) e ad alcuni parametri rilevabili da remoto (clorofilla, sedimenti sospesi, presenza di eventuali sversamenti). Attraverso la raccolta e l’elaborazione di dati misurati e telerilevati e l’uso di modellistica meteo-marina, idrodinamica e biogeochimica, è possibile contribuire al monitoraggio dei parametri marini fondamentali a scala mediterranea e regionale. La misura dei parametri marini si basa sull’integrazione di misure puntuali in mare (con vari strumenti a bordo di piattaforme fisse e mobili) e misure remote, derivate dai radar costieri e dai satelliti. Le attività di misura sono fondamentali anche per valutare l’affidabilità dei modelli meteo-marini e migliorarne le prestazioni. La modellistica marina permette di descrivere, ricostruire e prevedere lo stato del mare sia in superficie che su tutta la colonna d’acqua, con elevata risoluzione spaziale e temporale.
I modelli simulano la dinamica e le variazioni di diversi parametri marini relativi al moto ondoso, all’idrodinamica (correnti, livello del mare, temperatura e salinità) e a proprietà biogeochimiche (nutrienti, clorofilla).
Di seguito, in Figura 2, a puro titolo esemplificativo, si mostra una mappa delle previsioni di corrente prodotta dal LaMMA utilizzando il modello ROMS con risoluzione a 2Km.
Il Consorzio LaMMA partecipa al progetto SICOMAR (SIstema di COntrollo MARino), finanziato nell'ambito del Programma di collaborazione transfrontaliero Italia-Francia “Marittimo”. Il Progetto affronta in maniera integrata il tema della sicurezza in mare e del controllo dell'ambiente marino, su un'area transfrontaliera dal patrimonio di straordinaria ricchezza il quale ha visto, anche in tempi molto recenti, l'emergere di rilevanti criticità ambientali, e che ospita il Santuario dei Cetacei.
L’obiettivo generale di SICOMAR è quello di costruire un sistema di controllo marino sostenibile per l’area transfrontaliera attraverso un insieme
Figura 2: Mappa delle previsioni di corrente del mare di Toscana (LaMMA)
integrato di investimenti materiali e immateriali da parte di istituzioni regionali, attori pubblici e centri di ricerca. SICOMAR intende rispondere a queste necessità proponendo obiettivi di immediata realizzabilità, secondo quanto chiaramente identificato nel corso del progetto MOMAR, partendo dall’implementazione di una rete di misura marina fondata su strumenti tecnologici allo stato dell’arte. L'ambizione è quella di compiere un passo rilevante verso l’obiettivo di coprire tutta l’area marina transfrontaliera, a cominciare dalle zone di particolare criticità, quali i Parchi, il sistema dei canali e degli stretti (Canale di Corsica, di Piombino, dell’Argentario, delle Bocche di Bonifacio), le aree marine protette, le aree portuali, le aree a vocazione turistica.
Le principali attività del progetto riguardano la creazione di un sistema di monitoraggio ad alta tecnologia che, almeno in questa prima fase, è focalizzato alle acque dell'Arcipelago Toscano. In risposta alle esigenze di infrastrutture materiali e immateriali nell’area marina e costiera transfrontaliera SICOMAR prevede infatti l'acquisto e l'installazione di apparecchi di alta tecnologia (come ad esempio veicoli autonomi e campionatori automatici a bordo delle navi) e di radar HF. Parallelamente, SICOMAR prevede attività finalizzate alla messa a punto di un modello di governance marina transfrontaliera, attraverso il coinvolgimento dei più rilevanti stakeholder di riferimento dell’area.
Nasce di conseguenza la necessità di studiare e approfondire la conoscenza dei radar HF e delle loro potenzialità in ambito oceanografico.
La Tesi è cosi strutturata: nel Capitolo 1 sono esposti alcuni concetti generali sui radar HF ed è presentato il fenomeno di Bragg su cui questi radar basano il proprio funzionamento. Nel Capitolo 2 sono descritti i due sistemi di telerilevamento HF per la misura delle correnti superficiali, il CODAR e il WERA, e le tecniche di risoluzione spaziale adottate da questi due sistemi radar. Avendo a disposizione, per l'elaborazione sperimentale svolta in questo lavoro di tesi, un dataset estratto da due sistemi radar WERA installati a San Rossore e Palmaria, il Capitolo 3 presenta più nel dettaglio il sistema WERA e i suoi componenti hardware. Nel Capitolo 4 viene presentato l'esperimento condotto nel 2009 dal NATO Undersea Research Centre (NURC) insieme all'Istituto di Oceanografia dell'Università di Amburgo e al Dipartimento di Ingegneria dell'informazione
dell'Università di Pisa in cui sono stati installati i due sistemi radar WERA a San Rossore e Palmaria. Si espone quindi l'elaborazione effettuata sui dati estratti da questi due radar per la stima delle correnti superficiali. Nel Capitolo 5 si mostrano i risultati ottenuti dalle elaborazioni e possibili sviluppi futuri.
Capitolo1. Il radar HF: Ground-wave
o surface-wave radar
Le onde di superficie si propagano seguendo la curvatura terrestre sfruttandone le capacità di conducibilità elettrica: è proprio grazie a questa proprietà fondamentale che i radar HF surface-wave sono utilizzati per il telerilevamento e per applicazioni oceanografiche - analisi della direzione e dell'intensità della corrente, e analisi dello spettro d'onda - dove la conducibilità dell'acqua salata è ottima.
Le onde di superficie sono infatti fortemente influenzate dai parametri materiali del mare e dell'atmosfera. La costante dielettrica complessa Ɛ è data da:
ε= 1 in atmosfera
ε= 80 +i σ
ε0ω in acqua alle frequenze HF (3-30 MHz) (1)
dove ε0 = 8,85x10^-12 As/Vm è la permittività nel vuoto, σ è la
conduttività e ω è la frequenza angolare HF.
L'attenuazione della propagazione dipende fortemente dalla parte immaginaria di Ɛ, quindi dalla frequenza e dalla conduttività σ che è una funzione della salinità e della temperatura. L'attenuazione dei segnali aumenta quindi con l'aumento della frequenza e con la diminuzione della conduttività dell'acqua di mare.
Usando le formule appropriate, sintetizzate da Dietrich et al (1975), queste dipendenze sono mostrate in Figura 3:
La massima distanza raggiungibile da un radar HF non dipende solo dall'attenuazione dell'onda elettromagnetica ma anche dall'intensità dello scattering, dal rumore atmosferico e dal rumore dovuto alle interferenze radio.
Si deve inoltre specificare che esistono due tipologie di High Frequency Surface-Wave Radar – HFSWR: HFSWR a bassa potenza comunemente usati per il telerilevamento e applicazioni oceanografiche e
HFSWR ad alta potenza utilizzati per la rivelazione di bersagli man-made
nell'ambito della sorveglianza marittima.
1.1 Equazione fondamentale del radar
Le differenze tra un radar HFSWR e un radar a microonde riguardano l'ambiente, la frequenza, la forma d'onda, la Radar Cross Section (RCS), gli effetti del multipath, il rumore, le interferenze, il guadagno di antenna, la risoluzione spaziale e il clutter [1] e possono essere evidenziate analizzando
Figura 3: Conduttività dell'acqua in funzione della salinità per sei diverse temperature
l'equazione fondamentale del radar. L'equazione fondamentale del radar introduce un legame tra la potenza in ricezione, il segnale trasmesso e le caratteristiche del sensore e della sua antenna, la geometria del problema (in particolare la distanza del bersaglio) e le proprietà del bersaglio. Sia Prx la
potenza ricevuta, Ptx la potenza fornita all'antenna trasmittente, Gtx il
guadagno in trasmissione, Grx il guadagno in ricezione, σt l'area equivalente
del bersaglio o radar cross section, A il surface wave attenuation factor, λ0 la
lunghezza d'onda della portante del segnale trasmesso, d il range del target,
Ls la perdita del sistema. Si ha dunque:
Prx=PrxGtxGrxσtA
4 λ04
(4π )3d4Ls (2)
L'equazione per un radar HFSW si differenzia da quella di un radar a microonde per il surface wave attenuation factor A. Questo fattore di attenuazione è tipicamente combinato con la perdita di propagazione in spazio libero, ottenendo così una sola perdita di propagazione: π
Lp=
(
4 π Rλ0A'
)
2(3)
dove A' è il surface wave attenuation mode modificato, che tiene conto delle perdite dovute alla rugosità della superficie. Per i radar a microonde il contributo di rumore dominante è il rumore termico al ricevitore, mentre per il HFSWR è dominante il rumore esterno. Per questo l'equazione del radar è scritta in termini del rapporto-segnale-rumore (SNR) dopo una integrazione coerente degli echi di ritorno su un certo numero di impulsi:
S N= ̄ PtxGtxGrx σtTi4 π L2pL sλ02N0 (4)
dove
Ptx è la potenza media trasmessa
Ti è il tempo di integrazione coerente
No è la densità spettrale di potenza di rumore
1.2 Fenomeno di Bragg: generazione del
clutter marino
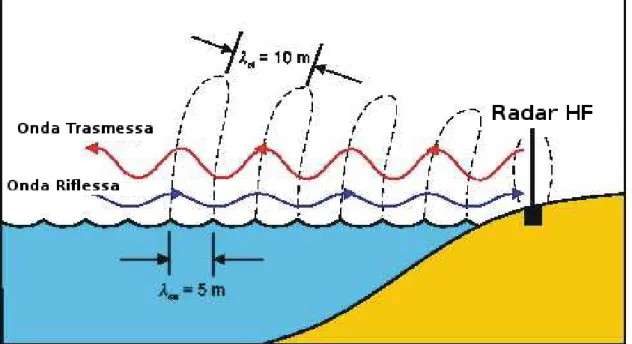
Il primo studioso che riuscì, nel 1955, a dedurre correttamente il meccanismo che produce il clutter di mare fu D.D.Crombie, il quale riuscì a spiegare le traslazioni in frequenza dell'eco marino sia al di sopra che al di sotto della portante, esclusivamente con esperimenti basati su osservazioni in banda HF della retro diffusione nello spettro Doppler: egli dedusse che questi shift Doppler dovevano essere generati dalle onde oceaniche in avvicinamento e in allontanamento. Le frequenze utilizzate dai radar, infatti, comportano delle lunghezze d'onda - λ - comparabili con quelle delle onde oceaniche gravitazionali: questo determina un fenomeno di risonanza fra le componenti della superficie marina con lunghezza d'onda pari a circa λ/2 con l'onda elettromagnetica trasmessa dal Radar, come mostrato in Figura 4. Il meccanismo è denominato “Bragg scattering" ed è della stessa natura del fenomeno responsabile della diffusione dei raggi X nei cristalli.
Lo scattering di Bragg è il processo dominante che genera la retrodiffusione nei radar HF.
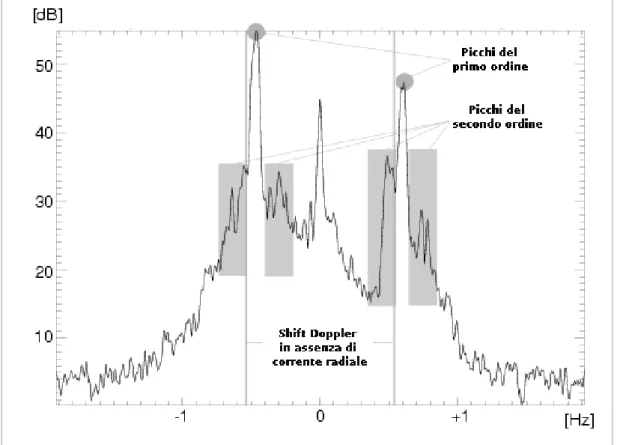
Lo spettro doppler del segnale retrodiffuso contiene due picchi che corrispondono alle velocità di fase delle onde marine scatterate. Dallo sfasamento di tali picchi rispetto alla posizione di simmetria, si può valutare l’ampiezza della corrente, ma solo in termini di avanzamento o retrocessione rispetto al sito.
Da un unico sito radar quindi è possibile ottenere soltanto l’informazione (direzione azimutale e velocità) della componente radiale della corrente superficiale.
Queste frequenze spesso si discostano dai valori teorici noti in acqua ferma (non in movimento): questo fenomeno è attribuibile ad una corrente superficiale sottostante. Lo spettro d'onda completo è dovuto allo scattering del secondo ordine che genera delle bande laterali nello spettro doppler alle alte frequenze, come evidente in Figura 5.
Per ottenere la direzione e la velocità della corrente totale bisogna disporre di almeno due siti radar. I segnali radiali di questi due siti forniranno infatti le due componenti necessarie per conseguire, dalla loro combinazione, la corrente superficiale totale, come mostrato in Figura 6.
Figura 5: Tipico spettro di ampiezza di un radar HF ground-wave
Il ritorno del clutter dalla superficie dell'oceano ha uno spettro doppler caratteristico. Il contributo dominante è prodotto dallo scatter delle onde dell'oceano aventi una lunghezza d'onda pari alla metà della lunghezza d'onda del radar che si muovono radialmente verso il radar o dal radar. Questi ritorni presentano due distinte frequenze doppler:
fBragg=±√ g
λ0π (5)
espressa in Hz e corrispondente alle velocità di propagazione di queste onde marine; λ0 è la lunghezza d'onda del radar mentre g è l'accelerazione
di gravità.
Lo scatter di ordini superiori dà origine ad ulteriori picchi e alla componente continua tra le linee di Bragg. Il livello della componente continua del secondo ordine ad un certo doppler aumenta sia con la frequenza del radar sia con lo stato del mare. Infine, il fattore di clutter può essere descritto in funzione del Signal-to Clutter-Ratio (SCR):
SCR=σt
σc (6)
σc=σ0A (7)
dove σc è il valore medio della RCS del clutter, mentre σ0 è la
cross-section per unità di area e A è l'area della superficie del patch del clutter al range del target.
L'applicazione più avanzata dei radar HF in oceanografia è sicuramente la misura dei campi di corrente superficiale ma esistono anche dei metodi empirici per derivare le onde dell'oceano dallo scattering di Bragg del secondo ordine.
I radar ad alta frequenza sono stati usati negli ultimi trenta anni per telerilevare le correnti superficiali dell'oceano. Come già visto lo spettro
doppler retrodiffuso contiene due linee discrete contornate da quattro lobi laterali continui. La frequenza dei picchi dominanti (linee di Bragg del primo ordine) è determinata dalle onde dell'oceano bragg-risonanti e può essere usata per misurare la velocità della corrente superficiale. I quattro lobi laterali sono generati dallo scattering del secondo ordine e permettono di applicare le tecniche di inversione per ricavare lo spettro d'onda dell'oceano.
Il processing delle onde nei radar HF è spesso basato sull'inversione delle equazioni di Barrick-Webe, introdotte nel 1977. Sempre per misurare le onde Hasselman [2] propose il concetto di interazione idrodinamica e elettromagnetica del secondo ordine dando adito ai lobi laterali continui del secondo ordine. Egli suggerisce che i lobi laterali del secondo ordine intorno ad ogni picco del primo ordine dovrebbero essere proporzionali allo spettro dell'altezza d'onda. Quindi, l'integrale dei lobi laterali normalizzati dovrebbe determinare l'altezza d'onda significativa.
Capitolo2. CODAR e WERA
Il primo sistema di telerilevamento HF per la misura delle correnti superficiali è stato il Coastal Ocean Dynamics Applications Radar (CODAR) sviluppato nel 1977 al NOAA da Barrick [3] . Sulla base del CODAR si sono avuti ulteriori sviluppi nel Regno Unito, grazie a Marconi, con l'Ocean Surface Current Radar (OSCR), negli Stati Uniti con la SeaSonde di Barrick e in Germania con il WEllen RAdar (WERA) di Gurgel [4].
2.1 Tecniche di risoluzione spaziale
Il termine Radar è l'acronimo di Radio detection and ranging, letteralmente “individuazione e misurazione di distanza via radio”. Il radar quindi non deve solo individuare un bersaglio, ma lo deve anche risolvere in range e in azimuth. In questo senso, negli ultimi cinquant'anni, sono state sviluppate molte tecniche, soprattutto ai fini della navigazione. Nei radar utilizzati per applicazioni di telerilevamento l'obiettivo è invece quello di misurare dei parametri geofisici sempre attraverso diverse tecniche per la risoluzione in range e in azimuth.
La risoluzione spaziale di un radar HF deve essere dunque analizzata in range ed in azimuth.
2.1.1 Risoluzione in range
Per ottenere la risoluzione in range si possono applicare due tecniche diverse che sono utilizzate dai radar HF in analisi: il CODAR per risolvere il range trasmette segnali ad onda continua (CW) mentre il WERA trasmette
segnali ad onda continua modulati in frequenza (FMCW). Il vantaggio della tecnica CW è la semplicità di design mentre gli svantaggi sono gli alti picchi di potenza necessari ed un alto livello di rumore dovuto all'aliasing.
La tecnica FMCW presenta il notevole vantaggio di poter modificare la profondità della cella in range variando la durata del chirp. Le tecniche FMCW sono inoltre più robuste alle interferenze radio ma il trasmettitore e il ricevitore devono essere progettati per funzionare con range estremamente dinamici e in modo fortemente lineare.
La frequenza di un chirp aumenta linearmente con il tempo:
f (t)=f0+B
T t 0 t<T⩽ (8)
dove f0 è la frequenza in trasmissione; la banda B determina la
risoluzione in range, e la durata T del chirp determina il rate di campionamento della superficie del mare che per il WERA è T=0,26 secondi.
2.1.2 Risoluzione in azimuth
Per quanto riguarda la risoluzione in azimuth comunemente si usano le tecniche di beamforming (WERA) e direction finding (CODAR) [5].
In entrambi i casi si assume che le antenne in trasmissione siano omnidirezionali o leggermente dirette verso il mare e che la risoluzione in azimuth si ottenga attraverso un array di antenne riceventi. Ciascuna singola antenna riceve, sovrapposti gli uni agli altri, echi provenienti da diverse direzioni azimuthali.
Nel CODAR, che utilizza la tecnica di direction finding, l'unità ricevente consiste di tre antenne orientate ortogonalmente l'una rispetto all'altra (come i sensori sulle boe) ed è in grado di ricevere e separare i segnali di ritorno su tutti i 360°. La tecnica di direction finding è basata quindi sulla decomposizione di Fourier delle serie temporali ricevute dalle
tre (o quattro) antenne riceventi sfruttando le caratteristiche di ampiezza e di fase [7]. Ciascuna componente di Fourier è attribuibile ad uno shift doppler e quindi ad una velocità radiale. Assumendo che le diverse velocità radiali provengano da direzioni diverse, è possibile determinare queste ultime confrontando le ampiezze e le fasi dei segnali che arrivano alle antenne riceventi.
Il maggior vantaggio del direction finding è la dimensione ridotta dell'array ricevente mentre il maggior svantaggio è che questa tecnica non è adatta ad estrarre le informazioni sullo stato del mare: il segnale del secondo ordine proveniente da una determinata direzione è mascherato dai segnali del primo ordine provenienti da altre direzioni. Un altro svantaggio, che può essere superato con complessi algoritmi, è l'assunzione che diverse velocità radiali provengono da direzioni diverse e ciò può non essere valido in un campo di corrente fortemente disomogeneo.
Il beamforming invece non si basa su quest'ultima assunzione e per ottenere informazioni sulla direzione della corrente e sulle onde questa tecnica realizza un set di fasci molto stretti. Per realizzare questa tecnica sono necessari array lineari di antenne molto ampi, che possono essere sia molto costosi che creare notevoli problemi di installazione: la geometria di un sito FMCW (Figura 7) richiede infatti una separazione geografica delle antenne che compongono l'array trasmittente e l'array ricevente di circa 5-10 lunghezze d'onda che corrispondono a distanze di 25-150 metri, a seconda della frequenza di lavoro.
La larghezza del fascio dipende dal rapporto tra la lunghezza dell'array e la lunghezza dell'onda elettromagnetica del radar ed è circa di 6 gradi per un array ricevente composto da 16 antenne spaziate di λ/2. In Figura 8 si mostrano due pattern di antenna: a destra è rappresentato il pattern di antenna di un array lineare con 16 antenne con spaziatura di λ/2, a sinistra è stata applicata una funzione finestra per ridurre i lobi laterali [6].
Il vantaggio del beamforming è che i fasci possono essere direzionati per ottenere una particolare copertura dell'area. Il beamforming generalmente aumenta il guadagno d'antenna che aumenta a sua volta il rapporto segnale rumore degli echi ricevuti. Tecniche moderne di digital beamforming possono anche essere configurate per formare dei nulli nel pattern di antenna nella direzione di eventuali sistemi interferenti radio. Il radar WERA utilizza il modo più evoluto di formare antenna patterns che è il digital beamforming: ciascuna antenna che compone l'array ha il proprio ricevitore e convertitore A/D e i fasci sono formati processando in modo digitale tutti gli output (Figura 9).
In questa tecnica i segnali di ciascuna antenna dell'array lineare vengono pesati e shiftati in fase e sono sommati insieme. La funzione peso è necessaria per ridurre i lobi laterali, lo shift di fase direziona il fascio nella direzione desiderata. L'ampiezza del fascio dipende dall'apertura dell'array.
Fi gura 8: Esempio di Beamforming. A destra: il pattern di antenna di un array lineare con 16 antenne con spaziatura di λ/2. A sinistra: è stata applicata una funzione finestra per ridurre i lobi laterali
Questa tecnica restituisce la serie temporale completa degli echi del mare dell'area selezionata.
Le tecniche di direction finding e beamforming possono essere applicate a tutte le configurazioni di antenne, anche se applicare il beamforming agli array lineari è sicuramente più semplice che applicarlo ad altre configurazioni di antenne.
2.2 Il radar WERA
Il radar WERA è un sistema di telerilevamento costiero per il monitoraggio delle correnti superficiali costiere, spettro d'onda e direzione del vento. Il radar WERA è stato sviluppato dall'Università di Amburgo a partire dal 1996 all'interno del progetto europeo Surface Current And Wave Variability Experiment (SCAWVEX).
Figura 9: Principio del beamforming: dopo i pesi “ai “ e gli
shift di fase “jj “, i segnali delle n antenne vengono sommati
In Figura 10 è illustrato lo schema a blocchi del sistema WERA: il cuore del sistema è il master clock, un oscillatore al cristallo a basso rumore, che è usato come clock per la generazione di tutte le frequenze e per il campionamento. Questo concetto rende l'intero sistema fortemente sincronizzato e coerente. Il Direct Digital Synthesizers (DDS) chirp
generator, controllato dal clock del sistema, genera direttamente il chirp del
radar. La frequenza centrale, la banda (da cui dipende la risoluzione in range) e la durata del chirp possono essere programmate via software. Per evitare la perdita di energia retrodiffusa, i segnali ricevuti dalle antenne non sono multiplexati ad un ricevitore ma è presente un ricevitore per ciascuna antenna (16 parallel receiver channels). Le variazioni di ampiezza e gli shift di fase tra le antenne sono misurati e compensati via software. Ciascun ricevitore include un demodulatore I/Q e filtri passabasso per ridurre/eliminare il fenomeno dell'aliasing. Ciascun ricevitore passa i segnali I (in fase) e Q (in quadratura) ad un convertitore Analogico/Digitale a 16 bit a basso rumore (32 channel s&h A/D converter). I segnali provenienti da tutti i ricevitori sono campionati simultaneamente e passati in modo sequenziale ad un sistema di elaborazione (preprocessing ADC control) che, in tempo reale, processa le range resolving FFT durante le misure. La risoluzione in azimuth è fornita successivamente su una workstation UNIX (UNIX workstation radial current calculation) , dove vengono processati i vettori di corrente e altri parametri.
Il segnale in trasmissione, rappresentato in Figura 11, è un segnale trasmesso in modo continuo, che cresce o decresce lineramente in frequenza con il tempo. Un bersaglio che produce un'eco ad un ritardo temporale Δt
apparirà con un offset in frequenza di Δf. Questo offset in frequenza è
costante nel tempo eccetto nell'intervallo di tempo fra 0 e Δt, dove si osserva un elevato shift in frequenza (negativo) rispetto al chirp precedente. La frequenza del chirp inizia ad f0 e aumenta/cresce fino a f0+B nell'intervallo di
tempo T, dove B è la banda del chirp. Questo processo mappa un bersaglio ad una distanza r ad un offset di frequenza:
Δf=B 2 r
T c (9)
dove c è la velocità della luce.
Il chirp lineare in frequenza può essere generato da un Oscillatore controllato in tensione (VCO) o da un DDS che alle frequenze di lavoro dei radar HF può produrre chirp estremamente lineari e con basso rumore sulle
Figura 11: Chirp lineare in frequenza che inizia a f0 con banda B e durata T. Dopo
aver raggiunto la frequenza finale f0 + B, la fase del chirp inizia in modo continuo
bande laterali. Il DDS è un metodo di produrre una forma d'onda analogica generando un segnale tempo variante in forma digitale e successivamente realizzando una conversione da digitale ad analogico. Esistono molteplici alternative per la generazione di un segnale ad una determinata frequenza, dalla tecnologia basata sul phase-locked-loop (PLL) per la sintesi di frequenze molto elevate, alla programmazione dinamica degli output dei Digital to Analog Converter (DAC) per generare forme d'onda arbitraria a frequenze più basse. Ma i DDS, il cui schema a blocchi è riportato in Figura
12, fra tutti sono i dispositivi che riescono a generare forme d'onda in uscita
programmabili nel modo più semplice e con maggiore risoluzione e accuratezza
La sintesi digitale di frequenza, Direct Digital Synthesis (DDS), è una tecnica che utilizza dei blocchi di digital data processing per generare un segnale di uscita sintonizzabile in frequenza e fase a partire da una sorgente di clock a frequenza fissa. In pratica la frequenza di clock di riferimento viene divisa dall'architettura del DDS per un fattore di scala deciso attraverso la definizione di una parola binaria detta Frequency Word. La Frequency Word è tipicamente formata da un numero di bit che varia da 24 a 48 e la sua lunghezza fornisce la risoluzione per la sintonizzazione della frequenza di uscita all'architettura DDS realizzata.
Lo scopo del DDS è quindi quello di generare un segnale peridodico ad
una determinata frequenza di uscita; solitamente la forma d'onda è un seno ma il sistema può essere utilizzato per generare una qualsiasi forma d'onda periodica. L'architettura DDS è composta da due componenti principali: un accumulatore di fase (Phase Accumulator) e un convertitore fase-ampiezza (Sine Lookup Table). L'accumulatore di fase è sostanzialmente un contatore ad N bit con incremento variabile. Ad ogni fronte di salita del clock, il valore dell'accumulatore, memorizzato in un registro di fase (Phase
Register), viene incrementato di una quantità intera definita da una parola
binaria memorizzata in un registro di frequenza (Frequency Register). Il convertitore fase-ampiezza è costituito solitamente da una Lookup Table in cui sonocontenuti i valori di ampiezza dell'onda sinusoidale corrispondenti ad un periodo completo della sinusoide. La parola in uscita all'accumulatore rappresenta un determinato valore di fase dell'onda sinusoidale, inviato al convertitore fase-ampiezza, il quale dà in uscita il valore codificato di ampiezza corrispondente. Per avere un segnale analogico è necessario aggiungere un convertitore digitale-analogico (Digital to Analog Converter), formando quello che viene chiamato Complete DDS Solution , di modo da convertire il valore digitale in un corrispondente valore analogico di tensione o corrente. La frequenza di uscita dipende quindi da due variabili: la frequenza del clock di riferimento e la Frequency Word. Normalmente il clock del DDS è fissato a circa tre volte la massima frequenza di uscita per evitare il fenomeno dell'aliasing. Incrementando la Frequency Word a ciascun clock, è possibile generare facilmente un chirp lineare in frequenza:
S(t)=sin
(
2 π(
f0+ B2 T t
)
t+Φ0)
(10)Per misurare lo spettro doppler in una determinata cella in range usando la FMCW è necessario seguire i seguenti steps: per ottenere lo shift in frequenza Δf, il segnale ricevuto deve essere demodulato con il valore attuale del chirp trasmesso; quindi si applica la Fast Fourier Transform (FFT) ai campioni di un chirp demodulato. Le linee spettrali della FFT sono quantizzate in:
Δfquant=1 T= B T 2 rquant c (11)
Il numero di campioni è legato al numero di celle in range processate anche se le celle in range nella parte “sbagliata” dello spettro non contengono informazione: nei chirp con frequenza crescente gli echi appaiono sempre con shift di frequenza Δf negativi. All'interno delle componenti spettrali positive non è presente segnale utile ma solo rumore e interferenza [6]. Quindi, con n campioni presi durante il primo frequency chirp, vengono processate n/2 celle in range. In termini di larghezza di cella in range, la quantizzazione in frequenza corrisponde a:
rquant= c
2 B (12)
Un filtro passabasso analogico con una frequenza di cutoff pari a (n/2)*Δfquant può essere utilizzato per evitare il fenomeno dell'aliasing,
dovuto al campionamento sotto la frequenza di Nyquist.
A questo punto è possibile calcolare la FFT su chirps consecutivi, tracciando la variazione di fase del segnale per una determinata cella in range. Il processing di m chirps forma una serie temporale di m campioni per ciascuna cella in range. Applicando una trasformata di Fourier a queste serie temporali, è possibile calcolare lo spettro Doppler per una data cella in range.
Il segnale riflesso presenta un offset in frequenza rispetto al segnale trasmesso, perciò la distanza è frequency encoded.
Il radar trasmette in continuo a basse potenze. Il necessario disaccoppiamento tra trasmettitore e ricevitore deve essere raggiunto usando siti separati per le antenne in ricezione e per quelle in trasmissione.
Capitolo3.
Stima delle correnti
superficiali dai dati radar WERA di San
Rossore e Palmaria
L'obiettivo di questa tesi è stato quello di produrre delle mappe di corrente a partire dai dati acquisiti dai due radar WERA che sono stati installati in Italia nel 2009 nell'ambito di un progetto realizzato dal NATO Undersea Research Centre (NURC) insieme all'Istituto di Oceanografia dell'Università di Amburgo e al Dipartimento di Ingegneria dell'informazione dell'Università di Pisa.
3.1 Caratteristiche tecniche dei radar WERA
di San Rossore e Palmaria
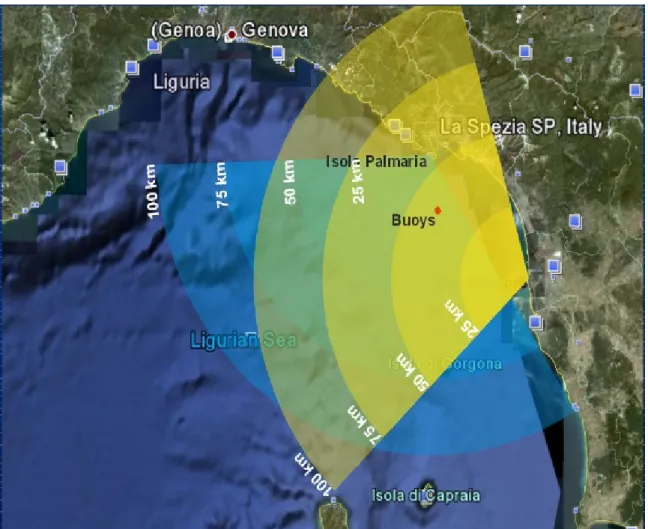
I due siti radar sono stati installati a San Rossore (Latitudine 43° 40' 53'', Longitudine 10° 16' 52'') e Palmaria (Latitudine 44° 2' 30'', Longitudine 9° 50' 37''). Entrambe le stazioni radar erano composte da un array lineare di 16 antenne, con un angolo rispetto al True North rispettivamente di 12° per San Rossore e 300° per Palmaria. La posizione e la copertura dei due radar sono visibili in Figura 13.
Il true North è l'angolo, in gradi, che va dal Nord geografico alla linea che si ha lungo l'array, guardando l'array stesso dall'antenna n°1 all'ultima antenna. L'area monitorata è dunque quella a sinistra di questa linea, come mostrato in Figura 14.
È importante assicurarsi che non vi siano echi del mare provenienti dalla parte a destra dell'array (parte posteriore). Questo può essere assicurato da:
•avere solo terra su questo lato;
•avere abbastanza direttività delle antenne in trasmissione in modo tale da illuminare solo la parte a sinistra dell'array.
Di seguito si riportano le caratteristiche tecniche dei radar installati a Palmaria e San Rossore:
Risoluzione in range 1.50 – 2.40 km (Palmaria-San Rossore)
Banda del chirp 100.00 – 62.50 kHz
(Palmaria-San Rossore)
Celle in range 100
Risoluzione in azimuth 8.0°
Celle in azimuth 121
Frequenza 12.190 – 12.565 MHz
Periodo del chirp 26 s
Campioni per file 128
File per ora 103
I dati grezzi dei radar WERA sono organizzati in file .USORT. Ciascun file .USORT contiene al suo interno un header, un data-cube complesso e le fasi di calibrazione. Per distinguere i dati .USORT da altri formati di dati l'header contiene il codice “FMSOCO” (Frequency Modulated Sorted phase Corrected). Nell'header sono contenute inoltre tutte le informazioni necessarie all'elaborazione dei dati. Di seguito un esempio relativo al file .USORT del 11/05/2009, ore 12:56 per la stazione di Palmaria:
N_Chirp: Numero di chirps 128
TypeFile: Tipo di file FMSOCO
DateFile: Data della misura 11-MAY-09 12:56 UTC
Hour: Ora della misura 12:56
NAME: Nome del sito Palmaria
FREQ: Frequenza di trasmissione 12,2950
YEAR: Anno 2009
RANGE: Risoluzione radiale, in Km 1,5
NORD: Angolo rispetto al true north, in gradi
300
NRAN: Numero di celle in range 256 LON_GRAD,LON_MIN,LON_SEC,
LAT_GRAD,LAT_MIN,LAT_SEC: Coordinate del sito, latitudine e longitudine
9,50,37 44,2,30
MT: Numero di campioni per chirp (all'interno di un file RAW)
1536
PWR: Potenza 4095
NANT: Numero di antenne 16
MD: Codice identificativo del modo di funzionamento del radar
035
RAN_OFF: Offset in distanza 0,5
RX_OFFSET: Offset in ricezione 0
Il data cube è una matrice complessa di dimensioni NANT*NRAN*N_Chirp, ovvero, nel caso in questione, 16*256*128, in cui il generico elemento rappresenta l'N_CHIRP-esimo (1-128) campione misurato dall'antenna NANT (1-16) nella cella in range NRAN (1-256).
Le fasi di calibrazione, rappresentate in un vettore NANT*1, sono le fasi di calibrazione applicate a ciascuna delle sedici antenne. Un esempio, ancora relativo al file .USORT del 11/05/2009, ore 12:56:
Numero antenna Fase di calibrazione [°]
1 0
2 157.921
3 -39.985
4 -122.894
6 -16.244 7 -2.670 8 -11.245 9 67.558 10 -160.783 11 85.118 12 70.822 13 0.747 14 101.964 15 -0.316 16 -19.697
Ciascun file .USORT si riferisce ad un intervallo temporale di 33,28 secondi, costituito da 128 campioni temporali. Ogni ora abbiamo quindi 103 file. Non tutta l'ora è però coperta dalla registrazione poiché alla fine di ogni ora ci sono circa tre minuti e mezzo di interruzione, necessari al sistema per ri-sintonizzarsi su una portante HF abbastanza sgombra.
Per ogni file .USORT è inoltre presente anche un file .URFI che contiene l'informazione relativa all'interferenza radio.
3.2 Elaborazione dei dati
Il software utilizzato per l'elaborazione dei dati e la stima delle correnti superficiali è stato unicamente MATLAB.
Per prima cosa, è stato necessario leggere i dati grezzi .USORT e , per ciascun file, creare una matrice 3D – NANT*NRAN*N_Chirp - ovvero 16*256*128 e salvarla in un formato .mat.
varia a seconda della tecnica che si utilizza per la risoluzione in azimuth, beam forming o direction finding. Come già detto, le tecniche di direction finding e beamforming possono essere applicate a tutte le configurazioni di antenne, anche agli array lineari ma il beam forming è più facilmente applicabile agli array lineari. Il radar WERA, quindi, nella sua configurazione compatta (Figura 15), in cui il sistema ricevente è composto da quattro antenne poste nei vertici di un quadrato realizza la tecnica del direction finding.
Con la configurazione ad array lineare (Figura 16) invece il radar WERA realizza la tecnica di beam forming.
Dalle specifiche tecniche riportate nel manuale operativo del radar WERA, si leggono le risoluzioni temporali e quindi i tempi di integrazione raccomandati per la tecnica di Beamforming e per quella di Direction Finding: se si applica la tecnica di Beamforming il tempo di integrazione richiesto per le correnti va dai 3 ai 10 minuti; se invece si applica la tecnica di Direction Finding il tempo di integrazione minimo è di 20 minuti.
Di seguito una tabella con alcuni parametri caratteristici delle due tecniche di risoluzione in azimuth:
PARAMETRI CONFIGURAZIONE COMPATTA (Direction Finding) CONFIGURAZIONE CON ARRAY (Beam Forming) Antenna Ricevente 4 antenne poste nei
vertici di un quadrato
Da 8 a 16 antenne lineari
Dati forniti Correnti e direzione del vento
Correnti, onde e vento
Campo di vista Fino a 270° Fino a 120°
Accuratezza angolare <10° <1°
Risoluzione temporale >20 minuti > 30 secondi
Essendo lo scopo di questa tesi, la generazione di mappe di corrente superficiale al variare del tempo si è scelto di applicare la tecnica con una migliore risoluzione temporale ovvero il Beamforming.
Vista la notevole dimensione dei dati e la difficoltà nel gestirli in tempi ragionevoli, in prima analisi, è stata presa in considerazione una sola ora di dati, quindi 103 file, ed è stata fissata una sola cella in range ed una sola cella in azimuth. Arbitrariamente si è scelto di lavorare con il giorno 11/05/2009, ore 14.00, cella in range n.8 e cella in azimuth n.10.
Come detto sopra, applicando la tecnica di Beam Forming il tempo di integrazione richiesto per le correnti va dai 3 ai 10 minuti; inizialmente si è quindi scelto di elaborare 10 file, corrispondenti a 5,54 minuti (33,28 secondi*10file). Per prima cosa, per ciascuno dei dieci file, è stato calcolato il periodogramma ovvero la densità spettrale di potenza stimata della sequenza in esame:
Pxx= 1
NChirp∣X ∣
2 (13)
finestra di Hamming, Il modo per ridurre la fluttuazione statistica della stima è quello di ottenere delle misure ripetute, statisticamente indipendenti, e di mediarle. All’aumentare della durata temporale della finestra di osservazione si ottiene una maggiore risoluzione spettrale, ma ogni singola misura resterà inattendibile dal punto di vista statistico. Ad esempio, piuttosto che considerare una sequenza lunga il doppio, per esempio 2N, è preferibile considerarne due lunghe N ed ottenere due stime distinte ed indipendenti (fanno riferimento a misure diverse e temporalmente disgiunte dello stesso processo). A pari risoluzione spettrale si ottengono due misure indipendenti: se se ne fa la media la varianza della stima dimezza. In base a questo principio è stata quindi realizzata la media dei dieci periodogrammi ottenendo un periodogramma medio con una varianza dieci volte inferiore rispetto al singolo periodogramma. Di seguito si rappresenta il periodogramma medio ottenuto per le celle in range n.8 (Figura 17) e n.85 (Figura 18) relativamente al radar di San Rossore: sulle ascisse la frequenza in Hz e sulle ordinate la densità spettrale di potenza in dB.
Da questi primi due grafici è possibile osservare come la potenza del clutter effettivamente diminuisca come R^2; allontanandosi in range il clutter infatti è meno visibile fino a quando, nelle ultime celle in range, la componente di segnale utile sarà nulla e sarà presente solo il rumore termico, condizione in cui sarà possibile misurare la potenza del rumore termico stesso essendo questa indipendente dalla distanza. Indicando con λ0SR la lunghezza d'onda del radar di San Rossore e con λ0P la lunghezza
d'onda del radar di Palmaria (diverse perché diverse le frequenze di funzionamento dei due radar), gli shift doppler dei picchi di Bragg del primo ordine rispettivamente per il radar di San Rossore (14) e per il radar di Palmaria (15) sono:
fBragg SR=±√ g
λ0SRπ=±0,3616 (14) Figura 18: Periodogramma medio su 10 file; cella in range n.85, cella in azimuth n.10
fBragg P=±√ g
λ0Pπ=±0,3562 (15)
Quando è presente una corrente superficiale, le linee di Bragg (i picchi intorno alla frequenza di Bragg, positiva e negativa) saranno shiftate/traslate di una quantità Δfr pari a:
Δfr=2 vr f
c (16)
dove vr è la componente radiale della corrente superficiale.
Le linee di Bragg si troveranno quindi in
Δfr±ΔfBragg (17)
Misurando la distanza delle due linee di Bragg rispetto alla frequenza attesa o meglio quanto la loro media dista da zero, si ricava la proiezione della frequenza doppler delle correnti lungo la direzione di vista del radar e quindi, invertendo infine la (16) si ottiene la velocità radiale per la specifica cella in range e in azimuth.
3.2.1 Sovracampionamento dei dati
Da una prima analisi delle velocità calcolate si è subito osservato la presenza di un gran numero di celle in cui la corrente radiale risultava nulla. Il motivo della presenza di queste componenti radiali nulle è da ricercarsi nella risoluzione in termini di frequenza e di velocità che si ottiene utilizzando 128 campioni. La risoluzione in termini di velocità, utilizzando 128 campioni ed un chirp di durata di 0,26 secondi, risulta essere di circa
0,015 m/s. Ciò vuol dire che tutte le componenti di intensità compresa fra 0 e 0,015 m/s vengono mappate in 0. Ed è proprio questo il motivo di tanti valori nulli, avendo le correnti molto spesso valori di piccola intensità. Per migliorare la risoluzione, non potendo agire sulla durata del chirp fissata dal sistema si è deciso di utilizzare un maggiore numero di campioni integrando quindi un periodo più lungo di dati. Scegliendo di utilizzare 50 file, organizzati in 10 gruppi da 5 file ciascuno, concatenati fra loro, ovvero lavorando con 640 campioni (128*5) si è raggiunta la risoluzione di 0,003m/s. In questo modo è stato possibile apprezzare anche piccolissime variazioni di velocità.
Di seguito il periodogramma su 50 file (Figura 19).
Il periodogramma medio può essere prodotto, per un certo azimuth fissato, per tutte le celle in range. La mappa che si ottiene rappresenta il periodogramma al variare della distanza. Di seguito, in Figura 20, un esempio di periodogramma in funzione della distanza in cui sull'asse delle ascisse si riportano le frequenze, sull'asse delle ordinate il range e in cui il colore rappresenta l'intensità del periodogramma stesso.
Per ogni sito radar, per ogni cella in range e per ogni cella in azimuth è stato quindi realizzato il periodogramma medio su 50 file ed è stata calcolata la corrente radiale, creando una matrice delle correnti 3D (Numero campioni*Numero celle in range*Numero celle in azimuth) per ciascun radar.
3.2.2 Controllo sull'intervallo di frequenze in
cui ricercare le linee di Bragg
Per evitare di considerare dei picchi dovuti a fonti di rumore piuttosto che al segnale utile è stato implementato un primo controllo sui dati e in particolare sugli intervalli di frequenze in cui andare a ricercare i massimi del periodogramma medio: sapendo che le correnti non variano molto velocemente, si è ipotizzato che queste possano variare al massimo di ±2
m/s; ciò corrisponde ad una variazione in frequenza di ±0,1675 Hz rispetto alla frequenza di Bragg. Le fasce in cui si sono quindi ricercati i massimi sono +(0,1941÷0,5291) Hz e −(0,1941÷0,5291) Hz per San Rossore e
+(0,1887÷0,5237) Hz e −(0,1887÷0,5237) Hz per Palmaria.
Di seguito si riporta un esempio di periodogramma relativo al radar di Palmaria, cella in range n.53 (Figura 21) e cella in azimuth n.1 in cui, senza questo controllo sull'intervallo di frequenze in cui ricercare le linee di Bragg, si sarebbe commesso un errore nella scelta del massimo.
Dalla figura sopra si può infatti osservare che se non avessimo limitato la ricerca del massimo nella fascia +(0,1887÷0,5237) Hz avremmo preso
come massimo il picco evidenziato in rosso, causato da un'interferenza a radio frequenza, piuttosto che quello evidenziato in verde. Nella Figura 22 si mostra il periodogramma in funzione del range, dal quale è possibile osservare l'interferenza a radio frequenza, presente su tutte le celle in range, causa del picco “sbagliato”.
Figura 21: Esempio di periodogramma in cui, grazie al controllo sulle frequenze, non si considera il picco evidenziato in rosso, bensì, correttamente, quello in verde
In questo caso specifico scegliendo il picco evidenziato in rosso nella
Figura 21, oltre a commettere un errore sull'ampiezza della corrente
avremmo commesso anche un altro errore sul segno della corrente: il picco “sbagliato”, evidenziato in rosso, si trova infatti alla sinistra della frequenza di Bragg e ciò corrisponde ad una velocità radiale negativa, mentre il picco “corretto”, evidenziato in verde, si trova a destra della frequenza di Bragg e corrisponde quindi ad una velocità radiale positiva. Con questo semplice controllo si è quindi riusciti ad evitare un duplice errore, sull'ampiezza e sull'inversione di segno.
Figura 22: Periodogramma in funzione del range – Stazione di Palmaria – 11/05/2009 h 14 - Cella in azimuth n.1
3.2.3 Controllo sul valore massimo dei picchi
Per rendere l'algoritmo ancora più robusto è stato inserito un secondo controllo sui dati, basato su un'analisi empirica dei periodogrammi: inizialmente è stata fissata una soglia pari a tre volte la deviazione standard del periodogramma e si è confrontata questa soglia con lo scarto tra il valore massimo dei picchi e il valore medio del periodogramma stesso. Analizzando i periodogrammi del giorno in esame per diverse celle in range e in azimuth si è subito osservato che la condizione in cui, per entrambi i picchi, lo scarto tra il valore massimo del picco e il valore medio del periodogramma superasse la soglia fissata si verificava solo raramente. Si è quindi deciso di abbassare la soglia e, dopo alcuni tentativi basati ancora sull'osservazione dei periodogrammi, si è deciso di fissare la soglia a due volte la deviazione standard. Nonostante il metodo utilizzato non sia del tutto rigoroso, questo ulteriore controllo ci ha permesso di continuare a considerare validi periodogrammi come quello di seguito riportato inFigura 23 relativo alla cella in range n. 5, cella in azimuth n. 1 in cui per
e scartare invece i periodogrammi come quello relativo alla cella in range n.53, cella in azimuth n.1, riportato in Figura 24, in cui solo un picco verifica la condizione richiesta:
L'aver effettuato il controllo su entrambi i picchi del periodogramma ha quindi permesso di eliminare la presenza di picchi spuri, che altresì sarebbero passati indenni dal controllo sull'intervallo di frequenze in cui ricercare le linee di Bragg, descritto nel paragrafo precedente.
3.2.4 Controllo sulla variazione delle velocità
radiali
Un ultimo controllo è stato applicato sulle due velocità radiali estratte dal periodogramma medio per ogni cella in range e in azimuth: anche per questo controllo la soglia fissata, discriminante per il verificarsi o meno della condizione richiesta, è stata fissata in modo empirico analizzando una serie di periodogrammi del giorno in analisi. Empiricamente si è osservato che mediamente la differenza fra le due velocità radiali relative ai due picchi
del periodogramma medio non supera il 15% della massima variazione di velocità ammessa, fissata in questo lavoro di tesi a 2m/s. Sono quindi stati considerati solo quei periodogrammi in cui la differenza fra le due velocità radiali, quella relativa al picco positivo e quella relativa al picco negativo, fosse inferiore a 0,3m/s; i periodogrammi in cui tale condizione non fosse verificata sono stati scartati dall'elaborazione.
Di seguito, in Figura 25, il periodogramma della cella in range n.36, cella in azimuth n.90, scartato da questo controllo:
Questo controllo ha quindi permesso di filtrare i periodogrammi in cui una delle due componenti di velocità radiale (positiva e negativa), che mediate restituiscono la velocità radiale complessiva, risulta essere estremamente più grande dell'altra a causa di un disturbo o rumore.
Figura 25: Esempio di periodogramma che non supera il controllo sulla variazione delle velocità radiali
Capitolo4. Creazione della mappa di
corrente superficiale
Dopo aver generato, per entrambi i siti di Palmaria e San Rossore, le matrici di corrente in cui il generico elemento (i,j) rappresenta il valore di corrente radiale per la cella in azimuth i-esima e cella in range j-esima, si è proceduto a realizzare una mappa di corrente relativamente all'area di sovrapposizione dei due radar.
Per prima cosa è stato necessario convertire le informazioni di range e azimuth in latitudine e longitudine; per entrambi i siti radar è stata quindi creata una griglia in cui ciascun punto rappresenta il centro di una cella in range per un determinato azimuth come illustrato nelle Figure 26 e 27. Da notare la diversa copertura dei due radar dovuta alla diversa frequenza di funzionamento dei due ovvero alla loro diversa Banda, pari a 100 KHz per Palmaria e 62,5 Khz per San Rossore .
Figura 26: Copertura radar WERA di San Rossore e PAlamaria: griglie di punti in latitudine e longitudine
Sull'area di intersezione delle due coperture radar è stata quindi creata una terza griglia regolare, rappresentata in blu nella Figura 28, in cui ciascun punto rappresenta il centro della cella in cui si andrà a calcolare la corrente superficiale.
Le dimensioni delle celle di questa nuova griglia (blu) dovrebbero rispettare le proporzioni tra le latitudini e le longitudini delle griglie, rossa e verde, che rappresentano la conversione delle coordinate radar, range e azimuth; ciononostante si è scelto, per una prima analisi, di non rispettare questa proporzione al fine di ottenere una maggiore risoluzione. Si mostreranno in seguito altre mappe di corrente in cui si rispetteranno le suddette proporzioni.
Su questa griglia regolare è stata quindi creata una maschera che permettesse di elaborare solo le celle in cui fossero presenti i dati di entrambi i siti radar. Su queste celle è stata quindi applicata, per entrambe le matrici di corrente radiale, un'interpolazione di tipo nearest neighbor in modo tale da assegnare ad ogni cella il valore di corrente corrispondente al punto campionato più vicino rispetto al centro della cella stessa.
Per produrre dei vettori di corrente affidabili a partire dalle misure radiali è stato inoltre necessario valutare l'angolo di intersezione fra i vettori radiali delle due stazioni radar: l'angolo ottimo di intersezione è compreso fra i 30° e i 150° [5]. Sono quindi state escluse dall'elaborazione le celle in cui questa condizione sull'angolo di intersezione non fosse verificata. A questo punto, con delle semplici operazioni vettoriali, per ogni cella della griglia, è stata calcolata la corrente superficiale risultante dalle due componenti radiali dei due siti radar.
Figura 28: In blu la griglia regolare in cui ciascun punto rappresenta il centro della cella in cui si andrà a calcolare la corrente superficiale
In Figura 29 è mostrata la rappresentazione vettoriale del calcolo della corrente superficiale: con il punto blu è rappresentato, coerentemente con la griglia mostrata in Figura 28, il centro della cella in range in esame (O,O); i vettori in verde e rosso rappresentano rispettivamente le componenti radiali di corrente di Palmaria e San Rossore; le linee tratteggiate in verde e in rosso sono, rispettivamente, le rette perpendicolari ai vettori di Palmaria e San Rossore e passanti per la loro punta; il vettore blu rappresenta quindi la corrente superficiale risultante dalle due componenti radiali.
Radar Palmaria
Figura 29: Rappresentazione vettoriale del calcolo della corrente
Radar San Rossore
P=(xp,yp)
S=(xs,ys)
Q=(xq,yq)
Dal punto di vista matematico, indicando con:
• θp l'angolo compreso tra la retta orizzontale passante per il centro
della cella in range (O,O) e il vettore verde rappresentante la componente radiale di Palmaria,
• θs l'angolo compreso tra la retta orizzontale passante per il centro
della cella in range (O,O) e il vettore rosso rappresentante la componente radiale di San Rossore,
si ricavano rispettivamente i coefficienti angolari mp e ms delle due
rette perpendicolari ai vettori di Palmaria e San Rossore e passanti per la loro punta:
mp=− 1
tan (θp) (18)
ms=− 1
tan(θs) (19)
Definiti i due coefficienti angolari, per trovare il punto di intersezione delle due rette perpendicolari ai vettori di Palmaria e San Rossore e passanti per la loro punta (Q=xq,yq) si è impostato il sistema di seguito riportato in
cui la (20) e la (21) rappresentano, rispettivamente, le rette perpendicolari ai vettori di Palmaria e San Rossore e passanti per la loro punta:
yq=mp(xq−xp)+yp (20)
yq=ms(xq−xs)+ys (21)
Risolvendo il sistema descritto dalla (20) e dalla (21), si trovano infine le coordinate del punto Q, ovvero la punta del vettore della corrente superficiale risultante dalle due componenti radiali:
xq=msxs−ys−mpxp+yp ms−mp (22) yq=msmpxs−msmpxp+msyp−ysmp ms−mp (23)
Effettuando le operazioni sopra descritte per tutte le celle della griglia rappresentata in blu in Figura 28, si sono ottenute le mappe di corrente desiderate. Di seguito si riportano le mappe di corrente ottenute implementando uno alla volta i tre controlli realizzati nell'elaborazione dei dati descritta in questa tesi.
La prima mappa, di Figura 30, implementa quindi solo il primo controllo
• sull'intervallo di frequenze in cui ricercare le linee di Bragg.
In questa prima mappa prodotta si osserva la presenza di un vettore di corrente improbabile, evidenziato in rosso.
La seconda mappa di corrente, di Figura 31, realizza invece due controlli:
•sull'intervallo di frequenze in cui ricercare le linee di Bragg;
•sul valore massimo dei picchi.
Da questa seconda mappa di corrente si osserva che è ancora presente il vettore di corrente errato e che sono stati filtrati dei vettori di corrente che
Figura 31: Mappa di corrente: implementazione del controllo sulle frequenze e sul valore massimo dei picchi
non hanno soddisfatto il controllo sul valore massimo dei picchi. In questo caso si tratta di falsi positivi (ovvero vettori utili che vengono in questo caso scartati).
Infine, in Figura 32, si riporta la mappa di corrente risultante dall'elaborazione dei dati in cui si sono stati applicati tutti i tre controlli proposti:
•sull'intervallo di frequenze in cui ricercare le linee di Bragg;
•sul valore massimo dei picchi;
•sulla variazione delle velocità radiali.
Figura 32: Mappa di corrente: implementazione di tutti i tre controlli: controllo sulle frequenze, sul valore massimo dei picchi e sulla variazione delle velocità radiali
Da notare che con l'ultimo controllo sulla variazione delle velocità radiali si è riusciti a filtrare il vettore di corrente sbagliato precedentemente evidenziato in rosso.
Di seguito si riportano i periodogrammi medi in funzione del range nuovamente del giorno 11/05/2009, ore 14.00, per le due stazioni radar di San Rossore e Palmaria, Arbitrariamente, in Figura 33 e Figura 34, si mostrano i periodogrammi relativi alla cella in azimuth n.67.
Da notare, nella Figura 32, il rumore di fondo presente nelle prime celle in range. Si osserva inoltre un'interferenza a radio frequenza (Radio Frequency Interferece) presente su tutte le celle in range ad una frequenza di circa -0,19 Hz.
Anche nel periodogramma in Figura 33, relativo alla stazione radar di Palmaria, si osserva un'interferenza a radio frequenza su tutte le celle in range alla frequenza di 16 Hz circa. Il rumore di fondo risulta invece meno marcato che nella stazione radar di San Rossore.
È interessante osservare che, nonostante entrambi i periodogrammi delle due stazioni radar presentino dei disturbi e delle interferenze anche piuttosto marcati, grazie ai filtraggi effettuati nell'elaborazione dei dati, si è comunque riusciti ad estrarre delle mappe di corrente valide.
Di seguito, nelle Figure 35, 36, 37 e 38, ancora relativamente al giorno 11 maggio 2009, si riportano le mappe di corrente delle ore 14:00, 19:00, 21:00 e 23:00. In queste mappe, per una migliore visualizzazione si è scelto di cambiare la dimensione delle celle della griglia su cui si calcolano le
correnti diminuendo la risoluzione. Le dimensioni delle celle di questa nuova griglia, riportata in blu in Figura 34, sono state quindi scelte in modo tale da rispettare la proporzione presente tra le latitudini e le longitudini delle griglie, blu e verdi, che rappresentano la conversione delle coordinate radar, range e azimuth. Osservando quindi l'area di sovrapposizione delle due coperture radar si è scelto di fissare la dimensione della cella in latitudine a 0,04° e di conseguenza, per mantenere il rapporto di 1,3 delle altre due griglie, si è fissata la dimensione della cella in longitudine a 0,03°. In questo modo si è ottenuto una griglia regolare in cui all'interno di ciascuna cella sono presenti, all'incirca, lo stesso numero di punti in latitudine e longitudine.
Figura 35: In blu la griglia utilizzata per avere una migliore visualizzazione delle mappe della corrente
Il range massimo del radar dipende dalla frequenza di funzionamento (frequenze più basse permettono di avere range più ampi) ma diminuire la frequenza porta all'aumento della sensibilità alle interferenze esterne che possono portare ad avere dei dati corrotti. Alle frequenze più basse le riflessioni delle onde corte sulla ionosfera portano ad un aumento del rumore di fondo proveniente da grandi distanze. Questo può causare delle notevoli variazioni in range dal giorno alla notte [9]. In questo lavoro di tesi si sono elaborati nel dettaglio i dati acquisiti dai radar WERA di Palmaria e San Rossore il giorno 11 maggio 2009. Sebbene, confrontando i risultati ottenuti non si osservi una variazione significativa della qualità dei dati nelle
ore diurne piuttosto che nelle ore notturne, non si può escludere tale variabilità data la ristrettezza statistica del dataset studiato.
4.1 Conclusioni
In questo lavoro di tesi si sono dapprima presentati alcuni concetti generali sui radar HF e il principio di Bragg alla base del loro funzionamento. In seguito si è decritto lo stato dell'arte dei radar HF ad oggi usati nelle applicazioni oceanografiche, soffermandoci quindi sui due sistemi utilizzati per la misura delle correnti superficiali, il CODAR e il WERA. Nei capitoli seguenti si è studiato nel dettaglio il sistema WERA di cui si sono elaborati i dati raccolti nel 2009 a San Rossore e Palmaria per estrarne, infine, delle mappe di corrente superficiale. Si è quindi presentato nel dettaglio l'algoritmo utilizzato per la stima dell'intensità e della direzione delle correnti superficiali: si sono mostrati i controlli effettuati sui dati e quindi gli errori che tali controlli hanno permesso di filtrare. Nello specifico si sono implementati tre controlli:
• un controllo sull'intervallo di frequenze in cui ricercare le linee di Bragg che permetta di evitare un duplice errore sull'ampiezza e sull'inversione di segno della velocità radiale;
•un controllo sul valore massimo dei picchi che consenta di filtrare i picchi spuri
•un controllo sulla variazione delle velocità radiali per filtrare i periodogrammi in cui una delle due componenti di velocità radiale (positiva o negativa), che mediate restituiscono la velocità radiale complessiva, risulti essere estremamente più grande dell'altra a causa di un disturbo o rumore.
Un'interessante prospettiva per rendere l'algoritmo di estrazione delle correnti, presentato in questo lavoro di tesi, più robusto e affidabile può essere rappresentata da una calibrazione accurata delle soglie utilizzate nelle varie fasi di controllo: nella scelta delle soglie si è infatti lavorato con alcuni valori empirici o semi-empirici; con maggiori risorse di calcolo e con un numero più consistente di dati si potrebbe rendere quindi oggettiva questa valutazione empirica realizzando un'analisi statistica su un dataset