Capitolo 6
Validazione del modello
Si è voluto a questo punto confrontare la traiettoria ideale ottenuta dal nostro algoritmo di ottimizzazione con i dati raccolti in una campagna di prove condotte da vari piloti (professionisti e non) su di un simulatore di realtà virtuale, allo scopo di validare i risultati ottenuti.
Il confronto tra i dati rilevati ed i nostri risultati ha dato poi lo spunto per una breve riflessione sullo sviluppo di veicoli capaci di adattarsi ai vari stili di guida.
6.1
Il simulatore
Il simulatore di realtà virtuale utilizzato si basa su di un modello di veicolo complesso.
Il passo, i semipassi, le carreggiate, l’altezza del baricentro, le curve elas-tocinematiche delle sospensioni ed i pneumatici sono tipici di una vettura del segmento C. Le simulazioni non avvengono in stazionario, bensì considerando le inerzie che possiede il veicolo e rappresentando i transitori delle manovre. Inoltre il simulatore tiene conto dei movimenti della sospensione in seguito al trasferimento di carico e quindi delle modifiche che essi apportano all’assetto del pneumatico (variazioni di camber e convergenza). Inoltre non si trascura
più il valore dell’angolo di sterzo δ1. In generale quindi il sistema di riferi-mento del pneumatico non sarà più parallelo a quello del veicolo.
Il simulatore ha un impianto frenante con ripartitore di frenata lineare (rap-porto costante tra la forza frenante al retrotreno e all’avantreno) ed uguale pressione frenante tra le due ruote di uno stesso assale.
In trazione è implementato sul simulatore un modello di differenziale libero. Sul simulatore è implementato, inoltre, un modello di motore ed un modello di cambio, dotato di un numero discreto di rapporti. Viene così introdotto in trazione un limite diverso dall’aderenza (che, invece è l’unico utilizzato nelle curve d’aderenza adottate).
Durante le prove i piloti sono fatti sedere su un sedile montato su di una piattaforma, la quale si muove in seguito alle varie manovre, seguendo una logica che punta a riprodurre l’accelerazione agente su di essi in una normale autovettura. In pratica, alcuni attuatori elettrici fanno sì che essa si incli-ni lateralmente quando il veicolo sta curvando, in avanti se sta frenando ed indietro se sta accelerando. Ciò fa sì che si abbia, ogni volta che si viaggi a velocità (intesa come vettore) non costante, una componente della forza di gravità agente sul guidatore parallela ala piattaforma ed uguale all’acceler-azione cui esso sarebbe soggetto alle stesse condizioni su di un veicolo reale. Naturalmente tale “trucco” potrà essere attuato soltanto finché non si rag-giunge un certo valore dell’angolo d’inclinazione, oltre il quale si avrebbe il distacco del pilota dal sedile. Quindi il livello di accelerazione rappresentabile con questo artifizio è limitato.
La postazione di guida è dotata di un volante il cui angolo di rotazione è legato (tenendo conto di un opportuno rapporto di trasmissione e della cede-volezza della tiranteria) all’angolo di sterzo, di un pedale dell’acceleratore e di uno per il freno. Il cambio è automatico con pulsanti al volante.
Sempre per rendere il più realistiche possibili le percezioni del guidatore, un sistema di schermi garantisce, poi, una visuale tridimensionale di strada ed 1Da notare che l’angolo di sterzo è una quantità strettamente legata alle altre grandezze cinematiche del veicolo: angoli di deriva, velocità longitudinale, velocità d’imbardata
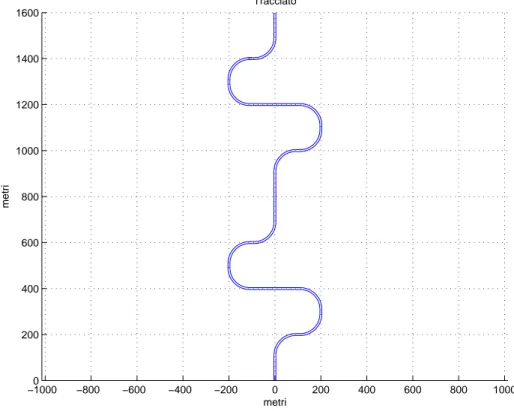
−10000 −800 −600 −400 −200 0 200 400 600 800 1000 200 400 600 800 1000 1200 1400 1600 metri metri Tracciato
Figura 6.1: Tracciato di prova
abitacolo.
6.2
Il circuito
6.2.1
Modellazione del problema
Il tracciato di prova utilizzato è mostrato in figura 6.1. È possibile notare come il circuito si compone di due sezioni, due “esse” consecutive interposte da un breve rettilineo. Il punto di partenza del veicolo è in corrisponden-za dell’origine del sistema di riferimento mostrato in figura e la velocità di partenza è posta uguale a zero. La larghezza della corsia è pari ad 8.5 metri ed è costante per l’intera lunghezza del tracciato. Per limitare il numero di variabili da ottimizzare si è imposto che la traiettoria eseguita nella prima
esse sia ripetuta anche nella seconda. È necessario notare che, nonostante il tracciato sia identico nelle due parti del circuito la velocità iniziale con cui tali sezioni sono affrontate è differente. È lecito pensare quindi che la trai-ettoria ideale nelle due esse possa essere leggermente differente. Considerare la traiettoria variabile nell’intero percorso affrontato non comporta nessuna difficoltà teorica, ma implica un ottimizzazione che coinvolga un numero di variabili talmente elevato da non poter essere realizzato in tempi ragionevoli. Inoltre si può notare dai risultati ottenuti, che la velocità d’uscita dalla prima esse è relativamente bassa, quindi l’ipotesi effettuata non limita la generalità della soluzione trovata.
L’imposizione dei punti di passaggio per l’interpolazione avviene nel modo seguente
• 4 punti posti sul rettilineo d’ingresso posti ad una distanza dalla prima curva variabile tra i 90 ed i 75 metri e posti in modo da realizzare la condizione di curvatura nulla in partenza (analogamente a come effettuato nelle ottimizzazioni precedenti).
• 23 punti nello sviluppo della prima esse, uno ogni 30 gradi, in ognuna delle curve che compone questa sezione del tracciato.
• 4 punti posti sul rettilineo tra le due esse (analogamente a come fatto per il rettilineo d’ingresso).
• 31 punti nella seconda esse imposti tramite le relazioni seguenti
x(i) = x(i − 31) (6.1)
y(i) = y(i − 31) + lesse (6.2)
dove con lesse si intende l’ordinata dell’ultimo punto della prima esse.
La spline risultante dall’interpolazione dei 62 punti sopra descritti risulta es-sere composta, in accordo con quanto scritto nel paragrafo 1.3, da 58 tratti.
curvatura, dalla figura 2.7, è possibile ricavare la dimensione del passo d’in-tegrazione ∆s necessario ad ottenere il tempo di percorrenza con la precisione del centesimo di secondo. Tale dimensione risulta pari a 0.35 m ed il tempo associato al calcolo di una traiettoria con tale passo d’integrazione è circa di 5 minuti. Tale valore risulta superiore a quello mostrato nella figura 2.12, ma tale variazione si spiega con la lunghezza, sensibilmente superiore ai casi precedenti, della spline interpolante da analizzare.
6.2.2
Ottimizzazione
L’elevato numero di variabili da ottimizzare, 25, ed il tempo di calcolo in-dicato in precedenza per il calcolo di una singola traiettoria ha comportato l’adozione di una strategia di ottimizzazioni a “cascata” analogamente ai casi studiati in precedenza.
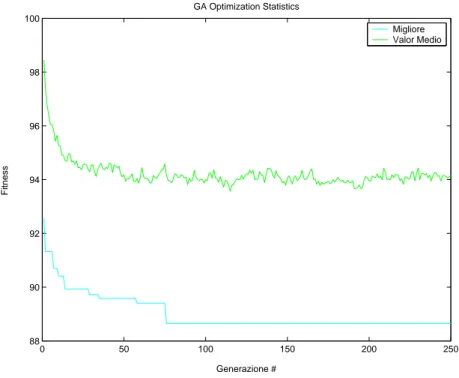
Il primo processo di ottimizzazione ha coinvolto un numero molto elevato
0 50 100 150 200 250 88 90 92 94 96 98 100 GA Optimization Statistics Fitness Generazione # Migliore Valor Medio
di curve, a causa dell’elevato numero di variabili da ottimizzare, ed è stato effettuato con un passo d’integrazione pari a circa 2 metri. È stata esamina-ta una popolazione di 250 individui che si è evoluesamina-ta per 250 generazioni. Il tempo di calcolo per tale processo è stato superiore a 30 ore. L’andamento del processo di ottimizzazione è mostrato in figura 6.2.
Il secondo processo di ottimizzazione ha coinvolto un numero di traiettorie sensibilmente inferiore. In particolare è stata studiata una popolazione di 20 individui per 20 generazioni, per un totale di 400 traiettorie. In tale ot-timizzazione il passo d’integrazione utilizzato è stato quello che garantisce la convergenza del tempo di percorrenza ed il campo di variazione delle vari-abili è stato posto pari ad un quinto della carreggiata disponibile a cavallo della soluzione ottenuta dal primo processo. Tale seconda ottimizzazione ha impiegato un tempo di calcolo molto simile a quella precedente, ovvero circa 30 ore.
È importante notare come la larghezza della corsia in questo caso sia su-periore a quella utilizzata in precedenza. Utilizzando quindi per la codifica numerica delle variabili un numero di bit pari a 10 si ottiene un valore di risoluzione ricavabile attraverso l’equazione 3.1 pari a circa 8 centimetri.
6.2.3
Risultati
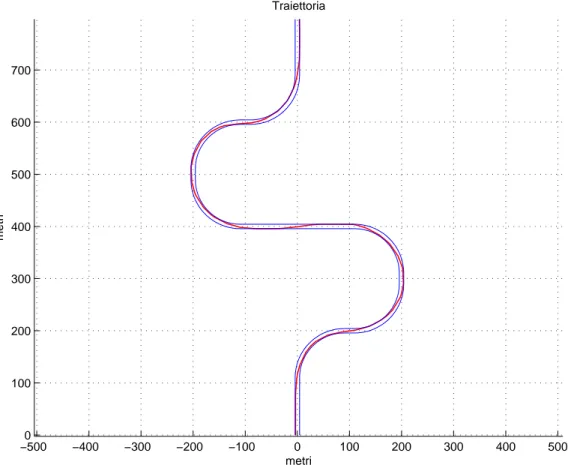
La traiettoria ottima risultante dal processo di ottimizzazione è mostrata nelle figure seguenti, insieme con l’andamento della curvatura e della velocità di percorrenza. È mostrata l’andamento della traiettoria nella prima delle due esse, in quanto, come scritto in precedenza, la traiettoria nelle due sezioni del circuito è identica.
Il tempo impiegato a percorrere la traiettoria ideale risulta pari ad 84.27 secondi, a cui corrisponde una velocità media di percorrenza pari a 32.1 m/s.
−5000 −400 −300 −200 −100 0 100 200 300 400 500 100 200 300 400 500 600 700 Traiettoria metri metri
0 500 1000 1500 2000 2500 3000 −0.015 −0.01 −0.005 0 0.005 0.01 0.015 Curvatura metri 1/R c (1/m)
Figura 6.4: Curvatura della traiettoria ideale
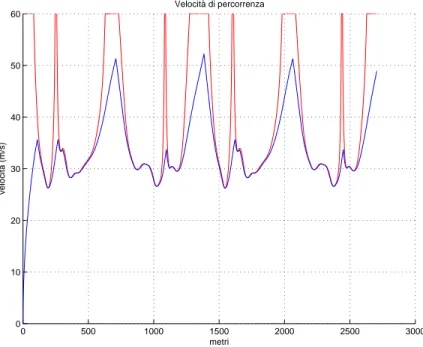
0 500 1000 1500 2000 2500 3000 0 10 20 30 40 50 60 Velocità di percorrenza metri velocità (m/s)
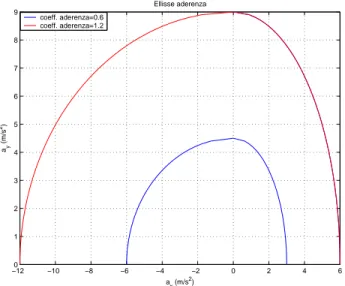
−120 −10 −8 −6 −4 −2 0 2 4 6 1 2 3 4 5 6 7 8 9 ax (m/s2) ay (m/s 2) Ellisse aderenza coeff. aderenza=0.6 coeff. aderenza=1.2
Figura 6.6: Variazione dell’ellisse d’aderenza
6.2.4
Variazione di aderenza
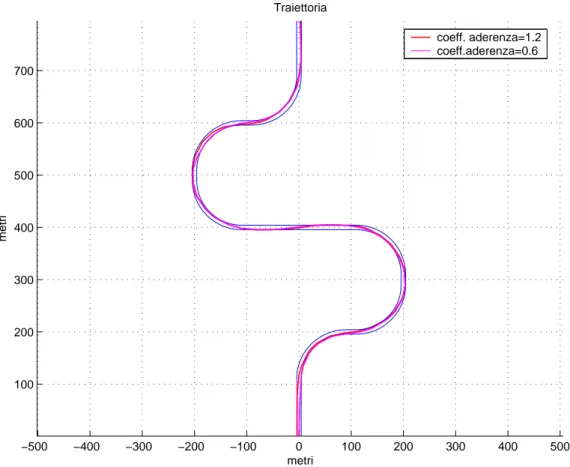
È interessante studiare come la traiettoria ottimale vari in funzione dell’el-lisse d’aderenza fornito. A tale proposito è stata effettuata una seconda ottimizzazione fornendo come caratterista d’aderenza un ellisse con semi assi pari alla metà dell’ellisse precedente, vedi figura 6.6. Con tale condizione si è voluto esaminare come varia la traiettoria ottima in condizioni di scarsa aderenza, tipiche di un asfalto bagnato. I parametri dell’algoritmo genetico per effettuare questa seconda ottimizzazione sono analoghi a quelli adoperati precedentemente. I risultati sono mostrati nelle figure seguenti. È possi-bile notare come la velocità media (vedi figura 6.9, decisamente più bassa in queste condizioni, influenzi la traiettoria eseguita, portando il pilota ideale ad effettuare traiettorie più strette rispetto alle precedenti, minimizzando quindi lo spazio percorso. Differentemente dal caso precedente dove era conveniente allargare la traiettoria in uscita di curva per sfruttare l’aderenza disponibile per accelerare il veicolo.
−500 −400 −300 −200 −100 0 100 200 300 400 500 100 200 300 400 500 600 700 Traiettoria metri metri coeff. aderenza=1.2 coeff.aderenza=0.6
Figura 6.7: Confronto tra le traiettorie ottime al variare dell’aderenza
disponibile
6.3
Confronto con i dati rilevati
6.3.1
I piloti
Ad ogni pilota è stato richiesto di compiere uno o più giri sul tracciato mostra-to in figura 6.1, cercando di guidare il veicolo al massimo delle sue poten-zialità. Non tutti i piloti scelti sono professionisti. Abbiamo voluto, così, analizzare diversi stili di guida, caratterizzati ognuno da diverse sensibilità nei confronti dei limiti del veicolo (in pratica minore o maggiore capacità di sfruttare al massimo le potenzialità del veicolo in termini di aderenza). È stato dimostrato, poi, come tale sensibilità sia diversa a secondo se il
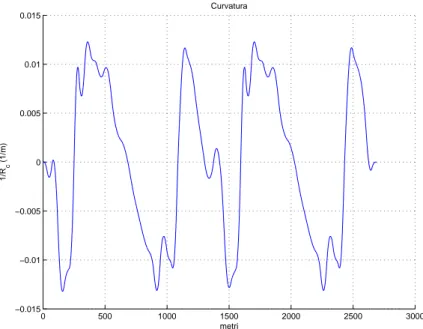
veico-0 500 1000 1500 2000 2500 3000 −0.015 −0.01 −0.005 0 0.005 0.01 0.015 Curvatura metri 1/R c (1/m)
Figura 6.8: Curvatura delle traiettoria ottimizzata con coefficiente di
aderenza pari a 0.6 0 500 1000 1500 2000 2500 3000 0 10 20 30 40 50 60 Velocità di percorrenza metri velocità (m/s)
Figura 6.9: Velocità delle traiettoria ottimizzata con coefficiente di aderenza pari a 0.6
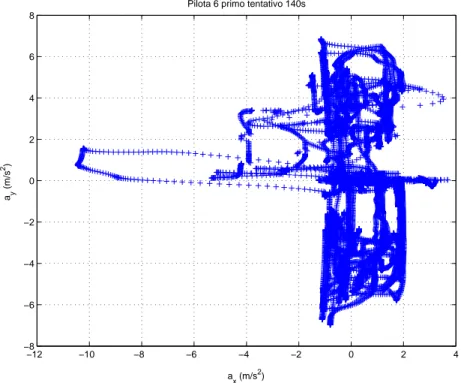
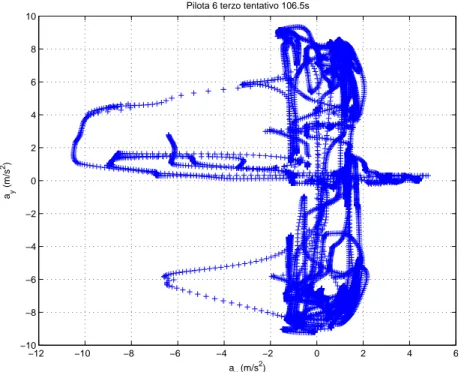
lo si trovi in una situazione di longitudinale puro, laterale puro o combinato. Una prima osservazione che si può fare riguarda il fenomeno dell’autoap-prendimento. Se, infatti, osserviamo le prestazioni di uno stesso pilota (ad esempio il pilota 6, non professionista) , notiamo che, tra il primo ed il terzo tentativo, abbiamo un netto miglioramento delle prestazioni. Infatti il tempo impiegato a percorrere il tracciato passa da 140 secondi nella prima prova a 106,5 secondi nella terza. Osservando i diagrammi g − g (figure 6.10 e 6.11), infatti notiamo che il guidatore tende sempre di più a lavorare nella zona di combinato (maggiore concentrazione di punti), sfruttando meglio l’aderenza disponibile. È questa una tendenza che si riscontra in tutti i piloti.
Naturalmente questo fenomeno è più evidente nei piloti non professionisti, meno abituati a ricercare e sfruttare a pieno le potenzialità di una vettura.
−12 −10 −8 −6 −4 −2 0 2 4 −8 −6 −4 −2 0 2 4 6 8
Pilota 6 primo tentativo 140s
ax (m/s2)
ay
(m/s
2)
−12 −10 −8 −6 −4 −2 0 2 4 6 −10 −8 −6 −4 −2 0 2 4 6 8 10
Pilota 6 terzo tentativo 106.5s
ax (m/s2)
ay
(m/s
2)
Figura 6.11: Diagramma g-g riferito al terzo tentativo del pilota 6
6.3.2
Confronto tra il risultato teorico ed i dati rilevati
Per poter analizzare i risultati ottenuti con quelli realizzati dai vari piloti è necessario fare un importante considerazione sul limite in trazione del sis-tema cambio+motore. È infatti evidente (vedi figura 6.11) come la massima accelerazione raggiunta sia decisamente inferiore a quella teoricamente
im-posta (6 m/s2). Infatti, analizzando il comportamento di tutti i piloti, si
può rilevare come tutto il circuito venga affrontato in terza marcia e che, con tale rapporto di trasmissione, e con la limitata coppia motrice fornita dal modello di motore, la massima accelerazione sviluppabile in condizioni
di pura trazione è pari a 3 m/s2. I punti del diagramma g − g che superano
tale valore sono realizzati con le marce inferiori, utilizzate nel primo tratto di rettilineo.
proceduto ad ottimizzare il circuito imponendo come massima accelerazione
il valore di 3 m/s2. Inoltre si è considerato come tempo di percorrenza quello
a partire dall’ingresso della prima curva. In questo modo non si considerano quei punti dei diagrammi di aderenza realizzati con le prime due marce. Il processo di ottimizzazione è stato eseguito con gli stessi parametri delle ottimizzazioni precedenti.
La curva ottima trovata è stata quindi confrontata con il migliore risultato ottenuto da un pilota professionista e quello ottenuto da un pilota non pro-fessionista.
Le prime figure, (6.12, 6.13 e 6.14) riguardano il miglior risultato ottenuto
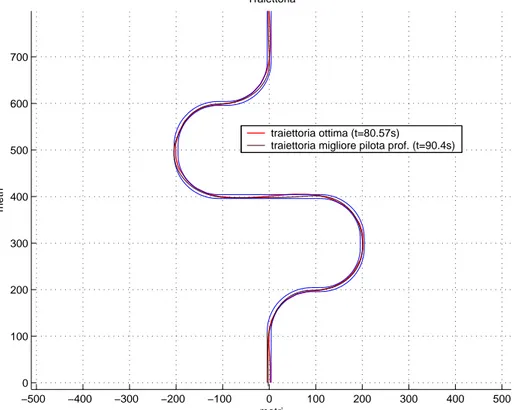
−500 −400 −300 −200 −100 0 100 200 300 400 500 0 100 200 300 400 500 600 700 Traiettoria metri metri traiettoria ottima (t=80.57s)
traiettoria migliore pilota prof. (t=90.4s)
Figura 6.12: Confronto tra la traiettoria ottima e quella realizzata nella migliore prestazione da un pilota professionista
0 500 1000 1500 2000 2500 3000 0 5 10 15 20 25 30 35 40 45 50 metri velocità (m/s) Velocità velocità ottima velocità migliore piloti
Figura 6.13: Confronto tra la velocità ottima e quella realizzata nella migliore prestazione da un pilota professionista
−12 −10 −8 −6 −4 −2 0 2 4 6 −10 −8 −6 −4 −2 0 2 4 6 8 10 ax (m/s2) ay (m/s 2) Sfruttamento aderenza
Figura 6.14: Confronto tra i diagramma g-g realizzato nella percorrenza della traiettoria ottima e quello realizzato nella migliore prestazione da un pilota professionista
partire dall’ingresso della prima curva, è stato pari a 90.4 secondi. La trai-ettoria ottima calcolata nel processo di ottimizzazione impiega a percorrere lo stesso tratto di strada 80.57 secondi. La principale differenza tra le traiet-torie eseguite (comunque molto simili) è nell’uscita di curva, dove il pilota tende a rimanere più largo rispetto alla traiettoria ottimizzata, ma non riesce a sfruttare a pieno la possibilità di una superiore accelerazione consentita da tale condizione (vedi figura 6.13).
È interessante notare inoltre come la curva ottimizzata tenda a sfruttare maggiormente la zona di frenatura rispetto ai diagrammi sperimentali. Tale condizione è infatti la più critica per quel che riguarda la sensazione dei pi-loti. È difficile, anche per i piloti professionisti, riuscire a frenare al limite senza provocare il bloccaggio delle ruote, con la conseguenza di non riuscire a imprimere la direzione voluta al veicolo. Nel simulatore utilizzato infatti, a differenza di un veicolo reale, non era semplice rendersi conto di quando i pneumatici si trovassero al limite dell’aderenza. Per tale motivo anche i piloti professionisti hanno trovato evidenti difficoltà nello sfruttare a pieno tutta l’aderenza disponibile.
Le considerazioni esposte possono cosiderarsi valide anche per i risultato ot-tenuto dal pilota non professionista.
Tale pilota impiega un tempo pari a 92.73 secondi per affrontare il tratto di strada richiesto. È evidente dal confronto tra le figure 6.12 e 6.15 che le traiet-torie eseguite in pratica coincidono. La differenza principale, riscontrabile nel confronto tra le figure 6.13 e 6.16, è nella velocità media di percorrenza del-la curva. Il pilota professionista è infatti capace di mantenere una velocità media più elevata.
È possibile concludere quindi che il pilota professionista è stato capace di sfruttare al meglio l’aderenza nelle fasi caratterizzate da una elevata accele-razione laterale, mentre le differenze con i piloti non professionisti nelle fasi di combinato in trazione ed in frenata non sono pronunciate. Infatti in fase di accelerazione la coppia del motore tende a livellare i risultati ottenuti, men-tre in fase di frenata la ricerca del limite è stata ostacolata dalla difficoltà di
percezione sopra descritta. −500 −400 −300 −200 −100 0 100 200 300 400 500 0 100 200 300 400 500 600 700 800 Traiettoria metri metri traiettoria ottima (t=80.57s) traiettoria pilota non prof. (t=92.73s)
Figura 6.15: Confronto tra la traiettoria ottima e quella realizzata nella migliore prestazione da un pilota non professionista
6.4
Limiti della campagna prove
È necessario a questo punto riflettere sui limiti delle prove sperimentali da noi condotte.
Anzitutto non viene utilizzato un vero e proprio veicolo bensì un simulatore, che ne schematizza soltanto (sebbene in maniera molto accurata) le caratte-ristiche. Stesso discorso può essere fatto per i pneumatici.
Inoltre, anche la realtà virtuale non riproduce in maniera assolutamente fedele l’ambiente in cui è immerso un guidatore di un veicolo reale. Un
0 500 1000 1500 2000 2500 3000 0 5 10 15 20 25 30 35 40 45 50 metri velocità (m/s) Velocità velocità ottima velocita pilota non prof.
Figura 6.16: Confronto tra la velocità ottima e quella realizzata nella migliore prestazione da un pilota non professionista
−12 −10 −8 −6 −4 −2 0 2 4 6 −10 −8 −6 −4 −2 0 2 4 6 8 10 a x (m/s 2) ay (m/s 2) Sfruttamento aderenza
Figura 6.17: Confronto tra i diagramma g-g realizzato nella percorrenza della traiettoria ottima e quello realizzato nella migliore prestazione da un pilota non professionista
cenno è stato fatto, per esempio, ai limiti insiti nella tecnica di riproduzione degli effetti sul guidatore dovuti all’accelerazione del veicolo. Un altro fat-tore è stato discusso nel paragrafo precedente sulla mancanza di un feed-back sulla condizione di slittamento dei pneumatici. Inoltre anche gli ingombri del veicolo non sono facilmente visualizzabili all’interno di tale simulazione. Questo porta, quindi, a delle differenze tra le sensazioni di un pilota all’in-terno di un veicolo reale, rispetto a quelle che si hanno nel simulatore. Quanto detto, però, non sminuisce l’utilità di un simile strumento nell’analisi del comportamento dei veicoli al variare delle loro caratteristiche.