2 Descrizione del sistema
In questo capitolo verrà descritto in dettaglio il sistema, elencandone le varie specifiche tecniche, analizzando l’ambiente di sviluppo per l’analisi preliminare, ed iniziando anche a prendere in considerazione lo sviluppo software, ottenendo alcuni risultati fondamentali per lo sviluppo del modello di controllo.
2.1 Specifiche tecniche del sistema e montaggio
Le principali specifiche di progetto a cui dovremo far fronte sono:• Occupazione di spazio / peso • Requisiti di banda / prestazioni • Consumo d’energia
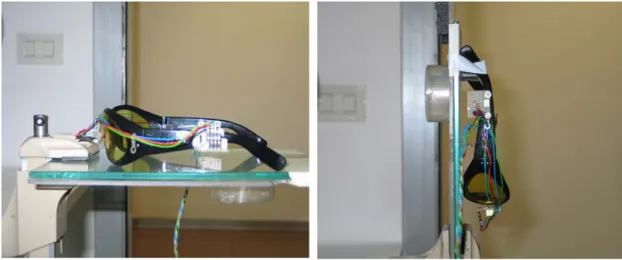
L’occupazione di spazio, sarà uno dei requisiti fondamentali, visto che vorremmo ottenere un dispositivo leggero, e che lasci libero l’uso delle mani: pertanto nella scelta dei componenti elettronici dovremo sempre tener presente delle loro dimensioni effettive e della possibilità di diretto montaggio sugli occhiali.
Altro aspetto tecnico da esaminare è la banda del sistema: tale specifica non è nota con esattezza, in quanto variabile da persona a persona, possibile quindi fare soltanto una stima.
Si è dunque supposto come ipotesi iniziale, poi confermata dai risultati sperimentali, di dover gestire una banda che parta dalla continua e che non superi i 50 Hz.
Tale numero è in realtà già di per se piuttosto elevato, e tipico soltanto d’atleti in corsa, che possono dunque effettuare brusche partenze o frenate.
Nel nostro caso avremo invece a che fare con persone che camminano, e le frequenze in gioco saranno tipicamente più basse; per avere un’idea più chiara della situazione, abbiamo registrato le accelerazioni di diversi tipi di camminate, ed effettuato una trasformata di fourier dei dati acquisiti in modo da poter esaminare il contenuto frequenziale.
In tale tipo d’esperimento un utente indossava gli occhiali e faceva qualche passo, cercando di mantenere ferma la testa per quanto possibile.
Fig. 2.1.1: due passi in avanti e due indietro
In figura abbiamo riportato l’accelerazione registrata lungo l’asse y da uno degli accelerometri durante una delle varie camminate registrate: l’utente ha compiuto due passi in avanti e poi due indietro ritornando in tal modo al punto di partenza;
possiamo a questo punto effettuare una trasformata di Fourier discreta del segnale, sui campioni acquisiti, mediante la formula:
N i N k j N N j
e
j
x
k
X
/ ) 2 ( ) 1 )( 1 ( 1)
(
)
(
⋅ − − − ==
⋅
=
∑
πω
ω
ed analizzando quindi lo spettro del segnale acquisito.
Fig. 2.1.2: Spettro del segnale considerato
Come si può notare in figura, il 99% della potenza del segnale, è concentrata nella banda 0-50 Hz, come da ipotesi iniziale; può comunque essere un’ottima approssimazione filtrare alla frequenza di 20 Hz, visto che sopra tale frequenza agiranno prevalentemente le rotazioni involontarie ed il rumore. Inoltre come si vede in figura, tutte le componenti hanno un modulo normalizzato inferiore a 0.1, e pertanto trascurabili. Abbiamo pertanto scelto di considerare la banda 0-20 Hz. Tali esperimenti non sono da considerarsi comunque del tutto generali, visto che sono stati effettuati su di un numero limitato di persone e di tipi di spostamento, ed andranno pertanto considerati validi solo nella nostra applicazione.
Per quanto concerne il consumo d’energia, dovremo tenere di conto della potenza dissipata dal nostro sistema: i 5 V dell’alimentazione sono ottenuti da batterie ricaricabili di tipo standard, con un’energia di 700 mA*h, e pertanto dovremo fare
in modo che il consumo totale non superi i 70 mA medi, in modo da avere un’autonomia di almeno 10 ore.
Sugli occhiali sono stati montati tre accelerometri biassiali, disposti lungo i piani xy, zx, zy, tale disposizione consente di misurare, almeno a livello teorico, sia le tre componenti d’accelerazione lineare, sia le tre d’accelerazione angolare, ottenendo così un completo monitoraggio dei sei gradi di libertà del sistema (si veda la sezione 4.1.1 per maggiori dettagli).
Fig. 2.1.3: distanze tra gli accelerometri
Com’è possibile osservare in figura sono effettuate delle misure per rilevare sia la distanza relativa tra gli accelerometri, sia la distanza del centro d’ogni accelerometro dal piano su cui poggiano gli occhiali.
Sono inoltre state effettuate delle misure per avere una stima del non perfetto orientamento lungo il piano teorico, dovuto agli inevitabili errori di montaggio, della
coppia d’assi di ciascun accelerometro. Come sistema di riferimento assoluto è stato scelto un sistema posto sul piano d’appoggio degli occhiali.
Fig. 2.1.4: sistemi di riferimento assoluto e relativi
Le misure d’orientazione sono state effettuate sistemando gli occhiali in due posizioni: una in cui gli occhiali erano bloccati su di un piano perfettamente perpendicolare al terreno leggendo quindi i valori d’uscita degli accelerometri disposti sui piani zx e zy, ed una ottenuta ruotando il piano di 90° rispetto all’asse x (ma poteva essere scelto anche l’asse y) e leggendo i valori d’uscita dell’accelerometro posto sull’asse xy.
Fig. 2.1.5: posizioni di calibrazione
Se gli accelerometri fossero stati montati in maniera perfetta i valori d’uscita dell’accelerometro numero due (piano zx) nella prima posizione degli occhiali (con piano d’appoggio parallelo al terreno), sarebbero dovuti essere 0 (asse x) e –g (asse z).
Fig. 2.1.6: accelerazione di gravità rispetto ad una terna ruotata
Essendoci invece un angolo di rotazione avremo che:
) cos( ) sin( α α ⋅ − = ⋅ − = g a g a z x
= − z x a a 1 tan α
Si sono quindi trovati i seguenti risultati:
• α rotazione accelerometro 1 (sul piano xy) = 0.0121 rad 1 • α rotazione accelerometro 2 (sul piano zx ) = 0.0014 rad 2 • α3 rotazione accelerometro 3 (sul piano zy ) = 0.0225 rad
Grazie a tali misure saremo in grado di recuperare la corretta misura di ciascun’asse, effettuando a livello software, delle semplici rotazioni.
Ovviamente oltre a tal errore di montaggio ne avremo anche un altro, dovuto al non perfetto posizionamento sul piano stesso, tale errore è più grave di quello citato in precedenza, in quanto non recuperabile in alcun modo a livello software, e pertanto, seppur presente, è stato assunto trascurabile.
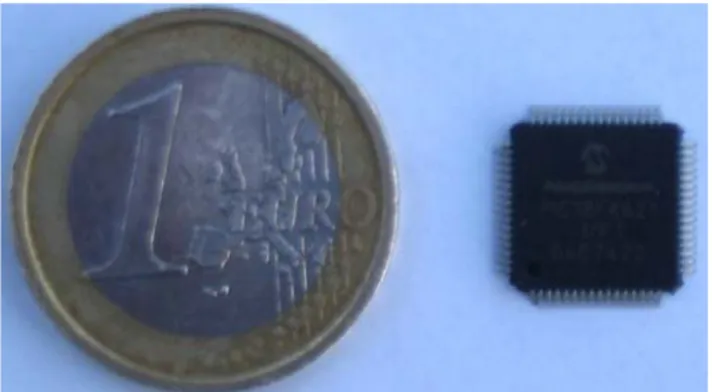
Gli accelerometri montati sugli occhiali, ed usati in tutti i nostri esperimenti sono degli ADXL202, prodotti dall’Analog Devices. La scelta di tali sensori, i metodi di calibrazione, e tutte le altre misure fatte, saranno trattate in dettaglio nel capitolo 4. Il microcontrollore scelto, è disponibile in un package di tipo QTFP64, dunque di dimensioni estremamente ridotte (lato 1 cm), e pertanto posizionabile direttamente sugli occhiali come da specifiche.
Ciò nonostante si è dovuto posizionarlo all’interno della pulsantiera, in quanto il passo dei pin è così piccolo (0.5 mm), da richiedere nel prototipo realizzativo una scheda d’adattamento. Va comunque ricordato che l’interfaccia da noi realizzata è soltanto un prototipo, e che nella fase realizzativa vera e propria, tale dispositivo potrebbe essere montato praticamente ovunque sugli occhiali.
Fig. 2.1.7: microcontrollore montato su scheda d’adattamento
2.2 Analisi preliminare e messa a punto dell’ambiente di
sviluppo
Nei nostri esperimenti preliminari si è scelto di utilizzare sistema basato su Matlab/Simulink e dSpace/ControlDesk.
L’interfaccia Simulink, dell’ambiente di sviluppo Matlab, prodotto dalla Mathworks Corporation [7], consente di sviluppare schemi di controllo a livello grafico, in
maniera quindi rapida ed intuitiva. Si possono così implementare simulazioni su dati acquisiti, con i numerosissimi strumenti che tale programma mette a disposizione. Si ha però il limite di non poter effettuare degli esperimenti che elaborino il segnale d’ingresso in tempo reale; tale limitazione può essere peraltro tolta se si fa utilizzo di una scheda d’acquisizione compatibile quale la DS1103, prodotta dalla casa produttrice tedesca dSpace.
Tale scheda presenta numerose possibilità d’interfacciamento con il mondo esterno quali ingressi A/D, uscite D/A, e via dicendo. Di particolare interesse segnaliamo 16 ingressi ADC ad alta risoluzione (16 bit) con cui sono state fatte le misure sugli accelerometri, e 8 lettori d’encoder incrementali, con i quali è stato possibile leggere in maniera rapida la posizione del rotore (si veda il capitolo 4). La DS1103 è inoltre dotata di un apposito software, chiamato ControlDesk, che è perfettamente compatibile ed integrabile con Matlab, e che ci consente di sviluppare schemi di controllo che funzionino in tempo reale.
Usando il real-time workshop di Matlab, è quindi possibile creare un eseguibile dello schema simulink da noi creato, che viene mandato direttamente al software di gestione di scheda ControlDesk, il quale provvede all’esecuzione del codice oggetto. In questo modo si è in grado di prelevare il segnale d’ingresso, elaborarlo tramite Matlab, e visualizzare il risultato in tempo reale tramite i numerosi strumenti messi a disposizione, quali display grafici in funzione del tempo, o in funzione di un’altra grandezza; è inoltre possibile cambiare direttamente durante l’esperimento i parametri simulink quali parametri o costanti (ad esempio poli di filtri, guadagni di amplificatori) e via dicendo.
Tale sistema di sviluppo porta, come è facile immaginare, ad un notevole risparmio in termini di tempo, nella fase prototipazione del progetto.
2.3 Sviluppo del software d’integrazione planare
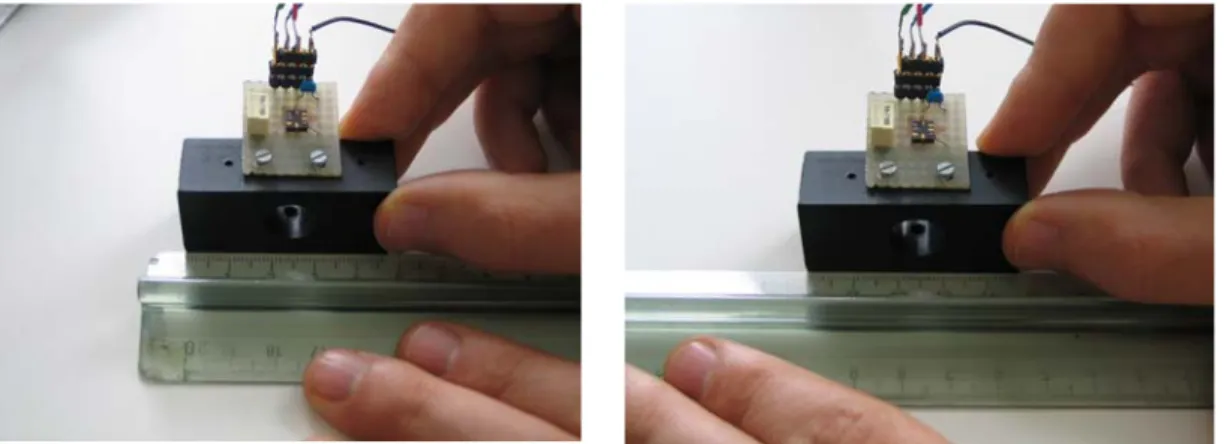
Andremo adesso ad analizzare lo sviluppo dell’algoritmo d’integrazione, tale studio è stato effettuato montando un singolo accelerometro su di una basetta scorrevole su di un piano, andando a misurare la posizione vera e propria della basetta, e confrontando tale risultato con quello ottenuto mediante il processo d’integrazione.
Fig. 2.3.1: esempio di spostamento sul piano
In figura si è ad esempio compiuto uno spostamento lineare di 10 cm.
Gli spostamenti effettuati sono stati di tipo puramente traslatorio, il problema della rotazioni verrà infatti trattato in seguito.
Di seguito faremo riferimento a misure di errore massimo: con tale concetto intendiamo il caso peggiore riscontrato durante i nostri esperimenti, bisogna infatti notare che a causa delle non linearità del circuito tali errori dipendono fortemente dalla forma del segnale d’ingresso.
2.3.1 Il doppio integratore semplice
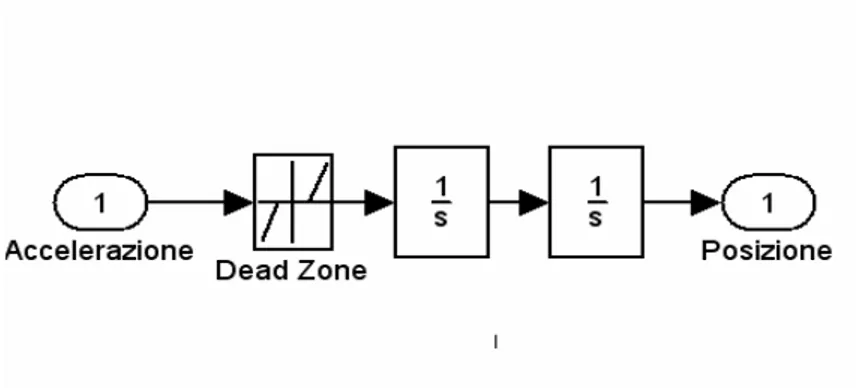
La prima idea che viene in mente è quella di usare due blocchi integratori come in figura
Fig. 2.3.2: il doppio integratore semplice
Tale configurazione implementa l’algoritmo discusso a pag. 10; nascono però due problemi :
• Integrazione del rumore del dispositivo • Integrazione anche dei più piccoli offset
Il primo problema è piuttosto fastidioso, infatti anche a dispositivo fermo, il rumore integrato due volte genera un’oscillazione sulla posizione che, seppur a valor medio nullo, da un effetto visivo non gradevole, e può causare in alcuni soggetti fastidi molto simili al mal di mare. È pertanto importante che la posizione sia ben ferma quando il dispositivo è fermo; per comprendere maggiormente tale fastidio si pensi ad esempio a che problemi si avrebbero a gestire il puntatore di un mouse che oscilla.
Il secondo problema è in ogni caso il più grave, infatti anche un piccolissimo offset, dovuto ad esempio al non perfetto posizionamento del dispositivo, viene integrato creando quindi un moto uniformemente accelerato che fa crescere la posizione in maniera quadratica.
Per risolvere questi disturbi è necessario inserire una zona morta di non sensibilità (dead-zone), che elimini sia i piccoli offset che l’effetto di sfarfallio.
Fig. 2.3.3 : il doppio integratore con dead-zone
L’ampiezza di tale zona morta va calibrata in maniera da eliminare i picchi massimi di rumore presenti nel dispositivo: scegliere un’ampiezza minore infatti comporterebbe la non eliminazione dell’effetto sfarfallio, che agirebbe con frequenza minore ma non meno fastidiosa, dato che il rumore uscirebbe dal blocco di dead-zone con una frequenza più bassa, generando un’oscillazione di frequenza più bassa ma di ampiezza più alta.
Nel nostro caso si è scelto un’ampiezza della zona morta pari a 0.1 m/ . s2
Tale configurazione risolve peraltro i problemi appena discussi, ma va a peggiorare uno di cui ancora non si è parlato, e che andiamo ora ad esporre.
Compiendo uno spostamento finito si ottiene teoricamente un’accelerazione a valor medio nullo, che porta quindi ad un azzeramento finale della velocità con conseguente stabilizzazione della posizione. A causa però dell’accuratezza finita del dispositivo di cui si dispone, tale accelerazione diverrà inevitabilmente a valor medio non nullo, che causerà un non perfetto azzeramento della velocità e quindi un drift della posizione. L’introduzione della non linearità può portare ad un peggioramento della situazione anche piuttosto drastico : si pensi ad esempio al caso in figura in cui la fase di accelerazione è corta e di valore elevato, e la fase di decelerazione è invece lunga ma di valor basso, in tal caso pur essendo il segnale a valor medio nullo, in uscita dalla zona morta si ha un segnale con un valor medio positivo di valore piuttosto elevato.
Fig. 2.3.4: accelerazione uscita da una dead-zone
Si è rilevato, a livello sperimentale, che in certi tipi di spostamento la velocità finale può superare anche gli 0.3 m/s in modulo. Si potrebbe pensare pertanto di inserire una zona morta subito a valle del primo integratore, in modo eliminare tutte le velocità inferiori a tale valore, ma così facendo si otterrebbe un errore sulla posizione troppo elevato, in taluni casi anche superiore al 70%.
Si deve pertanto cercare una strada migliore.
2.3.2 Il doppio integratore con filtro di Kalman
Trovandoci a gestire un sistema le cui misure degl’ingressi e dell’uscita sono affette da errore, si può pensare ad inserire un osservatore degli stati ottimo, quale il filtro di Kalman.
Dato il nostro sistema, descritto come
) ( ) ( ) ( ) ( ) ( ) ( ) ( t v t x C t y t w t x B t x A t x + ⋅ = + ⋅ + ⋅ = •
dove w(t) e v(t) sono processi di rumore Gaussiani bianchi mutuamente incorrelati con matrici di covarianza note chiamate rispettivamente Q(t) ed R(t);
Si consideri ora l’osservatore identità per il nostro modello: ] ) ( ) ( )[ ( ) ( ) ( ) (^t A x^t B u t K t y t C x^t x = ⋅ + ⋅ + − ⋅
è noto che il filtro di Kalman , minimizza l’errore quadratico medio di stima, la matrice dei guadagni del filtro K(t), è ottenibile dalla formula:
) ( ) ( ) (t P t C R 1 t K = ⋅ T ⋅ −
dove P(t) è la soluzione dell’equazione di Riccati:
) ( ) ( ) ( ) ( ) ( ) ( ) (t A P t P t A P t C R 1 t C P t Q t P• = ⋅ + ⋅ T − ⋅ T⋅ − ⋅ ⋅ +
L’implementazione tramite simulink del filtro di Kalman è facilmente ottenibile inserendo nel blocco che implementa lo spazio degli stati, i seguenti valori:
] 0 , 0 [ ] 1 , 1 [ ] , [ = = = ⋅ − = D C H B B C H A A m m m
Dove con , , intendiamo i valori corrispondenti in termini di spazio degli stati, del doppio integratore, ed H è automaticamente calcolata da Matlab. Nell’implementazione rimane però il problema legato al calcolo della matrice di covarianza del rumore d’uscita, che risulta peraltro priva di senso se il sistema è instabile. Ne risulta quindi che si dovrà trovare anzitutto un’ottimizzazione del nostro sistema d’integrazione che stabilizzi il sistema e minimizzi l’errore
m
commesso, e solo dopo ciò si potrà eventualmente valutare se inserire o meno il filtro di Kalman, tenendo di conto sia dei vantaggi ottenuti che dell’aumento del costo computazionale.
Dobbiamo inoltre ricordare che l’implementazione appena discussa del filtro di Kalman, vale solamente per sistemi lineari, cosa non del tutto veritiera nel nostro caso. Le non linearità del nostro sistema sono comunque piuttosto limitate, e vedremo anche come è possibile minimizzare il loro effetto; è pertanto ragionevole assumere che si possa usare tale implementazione senza commettere grandi errori.
2.3.3 Il filtro con integratore
Trovandoci di fronte al problema di dover in qualche modo azzerare la velocità finale non nulla, un’idea può essere quella di usare la configurazione filtro passo basso più integratore.
Fig. 2.3.5: soluzione filtro con integratore
Un filtro passo basso infatti si comporta sul breve periodo come un integratore, ma soltanto su tale periodo. Nella pratica è come si disponesse di un integratore con memoria breve, che dopo un po' di tempo che riceve un ingresso nullo azzera la propria uscita.
Vedendo la cosa da un punto di vista frequenziale, tutte le frequenze sopra la frequenza di polo vengono integrate, mentre quelle inferiori sono lasciate inalterate.
Ponendo pertanto il polo piuttosto in basso, al disotto di 1 Hz, siamo pertanto sicuri che praticamente tutte le frequenze d’interesse sono integrate (si veda il paragrafo 2.3.6).
La presenza della dead-zone a monte del filtro, ci fa escludere tra l’altro la presenza di segnali a bassa frequenza di ampiezza bassa, che verrebbero lasciate passare dal filtro, e poi integrate dal secondo integratore (creando dunque un drift).
Tale soluzione porta però un inconveniente: posizionando il polo nei dintorni di 1 Hz, si vengono a creare dei transitori di durata di qualche secondo, che portano a notevoli problemi quando integrati; può ad esempio succedere che in fase di frenata il segnale venga tenuto per troppo tempo, portando quindi non alla stabilizzazione della velocità ma piuttosto ad una vera e propria inversione della stessa, che pertanto crea un’inversione del senso di marcia, che oltre a dare un errore finale piuttosto elevato, crea anche una situazione molto fastidiosa a livello visivo.
Tale fenomeno diventa trascurabile portando la frequenza del polo sopra i 5 Hz, ma in tal caso sono troppe le frequenze che non vengono integrate, causando un errore sulla posizione in taluni casi superiore al 50%.
2.3.4 Doppio integratore con circuito di controllo
L’idea di base di questa soluzione nasce in parte dalla soluzione precedentemente descritta, ovvero quella di azzerare la velocità, dopo un tempo prefissato nel quale l’accelerazione si mantiene nulla, o per meglio dire nella fascia di dead-zone.
Blocco di controllo
Fig. 2.3.6: doppio integratore con circuito di controllo
all’uscita della zona morta, viene prelevato il modulo del segnale che viene confrontato con una soglia inferiore ai valori della zona morta, in questo modo se il segnale è all’interno della zona suddetta, in ingresso all’integratore nel circuito di controllo viene dato in ingresso una costante di valore unitario, quando il segnale esce dalla dead-zone, l’integratore viene resettato ed il suo ingresso diventa nullo. In tal modo ogni volta che il segnale entra nella zona critica, in uscita dell’integratore si genera una rampa di pendenza unitaria, che viene confrontata con il tempo prestabilito, da noi fissato al valore 75ms, se la rampa supera tale valore, l’integratore di posizione viene resettato.
Tale valore è stato scelto per via sperimentale, considerando che maggiore è tale tempo e maggiormente inciderà il residuo di velocità sul risultato finale, ma al tempo stesso un valore troppo basso potrebbe far azzerare la velocità, anche durante il movimento vero e proprio, visto che tra la fase di accelerazione e quella di decelerazione esiste un intervallo temporale, in cui l’accelerazione è quasi nulla. I risultati ottenuti con tale soluzione software, sono stati piuttosto soddisfacenti, abbiamo ottenuto la stabilità del sistema, con errore massimo sulla posizione di poco superiore al 20%, rimane però il problema legato alla distorsione: il segnale infatti attraversa continuamente la zona morta.
Tale problema è particolarmente grave se si hanno in ingresso segnali con ampiezza non molto elevata.
2.3.5 Doppio integratore con circuito di controllo ottimizzato
Si vuole ora risolvere il problema della distorsione: ovviamente non si può eliminare completamente la dead-zone, in quanto l’introduzione di una non linearità è stata fondamentale, come si è visto nei paragrafi precedenti, per risolvere i problemi di stabilità e di sfarfallio della posizione, ciò nonostante possiamo fare in modo che il segnale passi attraverso tale zona il meno possibile. A tal fine è stato strutturato il seguente circuito
Blocco di controllo
Fig. 2.3.7: Circuito di controllo ottimizzato
Come si vede è stato aggiunto uno switch, al quale entrano in ingresso da un lato la costante nulla e da un altro il segnale non ancora entrato nella zona morta; in questo
modo quando il circuito di controllo segnala che l’accelerazione in ingresso è diversa da zero, il segnale viene fatto passare senza subire distorsioni, mentre nel caso in cui il segnale rimane all’interno della dead-zone per un tempo uguale o superiore a 75ms viene dato in ingresso agli integratori la costante nulla, e l’uscita dell’integratore viene azzerata.
Con tale soluzione, si è riscontrato un errore massimo nella misura della posizione del 15%, con un errore medio del 10%.
A tal punto abbiamo anche provato ad inserire in parallelo il filtro di Kalman, precedentemente descritto, notando una diminuzione sia dell’errore medio, che dell’errore massimo, inferiore all’1%.Si è dunque scelto di non inserirlo, per non aumentare di troppo il costo computazionale di tale procedura.
2.3.6 Separazione HF-LF
Andiamo adesso ad introdurre alcuni concetti interessanti per l’integrazione planare ma soprattutto, come vedremo per quella spaziale.
Il sistema uomo che cammina, come abbiamo già accennato, ha una banda passante che parte dalla continua e sicuramente non supera i 20 Hz .
In realtà tale ipotesi non è del tutto vera: sono infatti da escludere le frequenze vicine alla continua, in quanto non avremo mai a che fare con accelerazioni sostenute per lunghe tempo, ed è pertanto ragionevole pensare che una persona non riesca a tenere la sua accelerazione costante per più di 1 secondo, o poco più. Possiamo dunque considerare come limite di banda inferiore, senza commettere grandi errori, la frequenza di 0.5 Hz.
Nei nostri esperimenti di tipo planare, ad agire sotto tale frequenza vi sono dei disturbi dovuti principalmente ad errori di allineamento:
• Non perfetta ortogonalità della basetta su cui è montato l’accelerometro • Pendenza media del tavolo di lavoro diversa da zero
Nasce quindi l’idea di filtrare tali disturbi per ottenere una misura ancor più accurata.
Un’ idea semplice è quella di usare un filtro passo alto con frequenza di taglio pari a 0.5 Hz come in figura.
Fig. 2.3.8: inserzione di un filtro passa alto
Tale idea presenta però il problema già discusso dei transitori: si pensi ad esempio, al caso in cui si parta da una pendenza nulla, e ci si sposta ad un punto del tavolo a pendenza non nulla: il filtro passa alto tenderà ad azzerare la componente continua, introdotta dalla pendenza del tavolo, ma lo farà con una costante di tempo piuttosto elevata che creerà un errore elevato nell’integrazione. Tale problema diventerebbe trascurabile se si spostasse la frequenza del polo sopra i 5 Hz, ma in tal caso si andrebbero a tagliare anche molte frequenze di segnale, e non si migliorerebbe la situazione.
Vedremo nel prossimo capitolo come sarà possibile risolvere, almeno in parte tale problema.