Capitolo 2
Analisi delle
Distorsioni nonlineari
2.1 –
Dispositivi nonlineari
L’amplificatore di potenza (HPA, High Power Amplifier) è un elemento di cruciale importanza nelle comunicazioni via satellite e ad esso è associata una serie di problematiche. Gli HPA comunemente utilizzati nei sistemi digitali a microonde si basano sull’impiego di tre tipi di componenti attivi:
1 Travelling Wave Tube (TWT) o tubo ad onda progressiva, che ha doti di leggerezza e efficienza relativamente elevata.
2 Klystron Relflex o cavità risonante 3 FET ad Arsenurio di gallio (GaAs)
L’amplificatore a TWT è un dispositivo non lineare che viene fatto funzionare in prossimità del punto di saturazione per renderne massima l’efficienza
energetica. Ciò comporta l’insorgenza di un certo numero di problemi(fenomeni di intermodulazione, allargamento spettrale ecc).
Il comportamento non lineare dell’amplificatore a TWT viene caratterizzato attraverso un modello molto utilizzato in letteratura per la caratterizzazione degli HPA, il modello di Saleh senza memoria [4]. Secondo questo modello, indicato con x(t) e y(t) l’inviluppo complesso del segnale di ingresso e di uscita all’amplificatore, rispettivamente, la caratteristica ingresso-uscita del TWT è completamente specificata dalla seguente relazione:
)]] ( [ ) ( [ )] ( [ ) (t A x t ej x t x t y ρ φ ϕ
ρ
+ = (2.1) con ( ) ( ) j[ (t)] x x e t tx = ρ ϕ . Ad ogni amplificatore a TWT possono essere associate
due funzioni reali:
A(ρ), detta caratteristica AM/AM (ampiezza di ingresso-ampiezza di uscita) non lineare, che modella le distorsioni in ampiezza subite dal segnale in ingresso.
Ф(ρ), detta caratteristica AM/PM (ampiezza di ingresso-fase di uscita) non costante che modella la modulazione di fase , non voluta, subita dal segnale in ingresso al TWT.
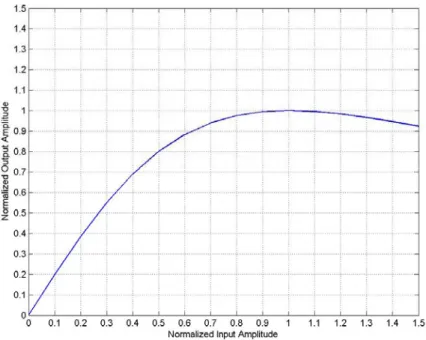
Nel modello di Saleh A(ρ) e Ф(ρ) sono espresse dalle relazioni:
2 ( ) 1 a A b ρ ρ ρ = + (2.2)
2 2 ( ) 1 c d ρ ρ ρ Φ = + (2.3)
Per cui la relazione ingresso-uscita del TWT è:
2 2 ( ) 1 ( ) 2 ( ) ( ) 1 ( ) c x t j d x t ax t y t e b x t ⎧⎪ ⎫ ⎨ ⎬ ⎭ + ⎪⎩ = + (2.4)
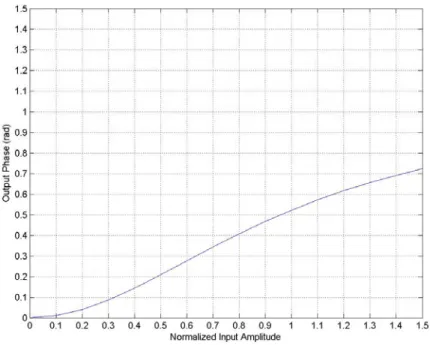
Di seguito si riportano i grafici delle caratteristiche AM/AM e AM/PM per il caso a=2,b=1,c=π/ 3,d =1:
Figura 2.2: Caratteristica AM/PM dell’amplificatore secondo il modello di Saleh.
Il punto di lavoro di un TWT viene specificato in termini dell’arretramento, o back-off, che è necessario prevedere per la potenza media di ingresso e/o uscita rispetto al punto di saturazione allo scopo di ottenere un comportamento sufficientemente lineare dell’amplificatore. Viene pertanto definito sia un back-off di ingresso che un back-off di uscita che sono funzione non lineare l’uno dell’altro. Detta Pin,sat(Pout,sat) la potenza in ingresso (uscita) all’HPA in
condizioni di saturazione ePin(Pout) la potenza media del segnale in ingresso
(uscita) all’HPA, il back-off d’ingresso e d’uscita vengono definiti, rispettivamente, come [5]: , 10 log in sat in P IBO P ⎛ ⎞ = ⎜ ⎟ ⎝ ⎠ (2.5) ,
10log out sat out P OBO P ⎛ ⎞ = ⎜ ⎟ ⎝ ⎠ (2.6)
Un OBO alto significa, quindi, collocare il punto di lavoro dell’HPA più
lontano dal punto di saturazione, in modo che il suo comportamento si possa ritenere pressoché lineare.
Figura 2.3
Aumentare il back-off dell’HPA significa comunque diminuire il rendimento energetico dell’amplificatore. Pertanto la scelta del back-off va fatta come compromesso tra la degradazione delle prestazioni per effetto del canale non lineare e la perdita in rapporto segnale-rumore.
Altri modelli che meritano di essere presi in considerazione sono quelli degli amplificatori di potenza a stato solido SSPA (Solid State Power Amplifier) e dei limitatori. Questi ultimi vengono utilizzati per modificare la dinamica di un segnale all’ingresso di dispositivi, come per esempio i convertitori analogico-digitale, ed anch’essi rappresentano dei blocchi non-lineari . Anche le caratteristiche ingresso-uscita di questi dispositivi possono essere rappresentate dalle due funzioni reali AM/AM e AM/PM.
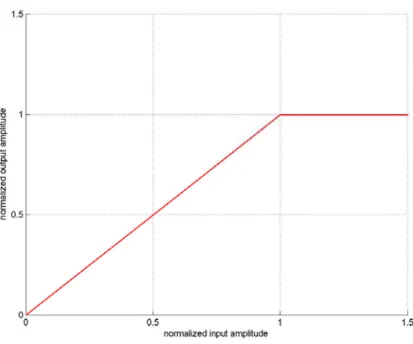
Per il limitatore avremo:
( )
⎩ ⎨ ⎧ > < = C A C AL ρ ρ ρ ρ (2.7)Figura 2.4: Il limitatore
dove A viene chiamato clipping level. Si definisce inoltre clipping ratio CR il rapporto tra il clipping level e la radice quadrata del valore quadratico medio,RMS, del segnale:
[ ]
[ ]
2 n x E C CR= (2.8)Per esempio con CR=1 il segnale viene limitato ad un livello pari al proprio
RMS. Per questo modello non è prevista la caratteristica AM/PM.
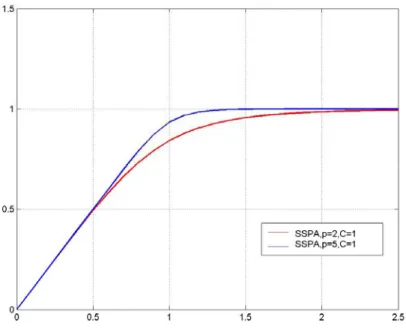
Per quanto riguarda invece gli amplificatori a stato solido (Solid-state Power Amplifier, SSPA) viene adottato il seguente modello:
( )
(
)
[
p]
p SSPA C A 1/2 2 / 1 ρ ρ ρ + = (2.9)Figura 2.5: SSPA
Il parametro C nella caratteristica AM/AM dell’SSPA assume lo stesso significato che nel caso del limitatore, mentre il parametro p regola la rapidità con cui si passa dalla regione lineare a quella di saturazione della caratteristica AM/AM. In Figura 2.4 e Figura 2.5 sono riportate le caratteristiche AM/AM del limitatore e dell’SSPA per diversi valori di p.
2.2 –
Analisi teorica delle distorsioni nonlineari senza
memoria.
In questo paragrafo viene presentata l’analisi delle distorsioni nonlineari senza
memoria sia dal punto di vista analitico sia attraverso l’analisi dei dati e
risultati ottenuti dal software di simulazione del sistema di trasmissione realizzato.
2.2.1 –
Approccio Analitico
Consideriamo il seguente diagramma a blocchi del sistema OFDM [6]:
( )m k c ( ) G f
( )
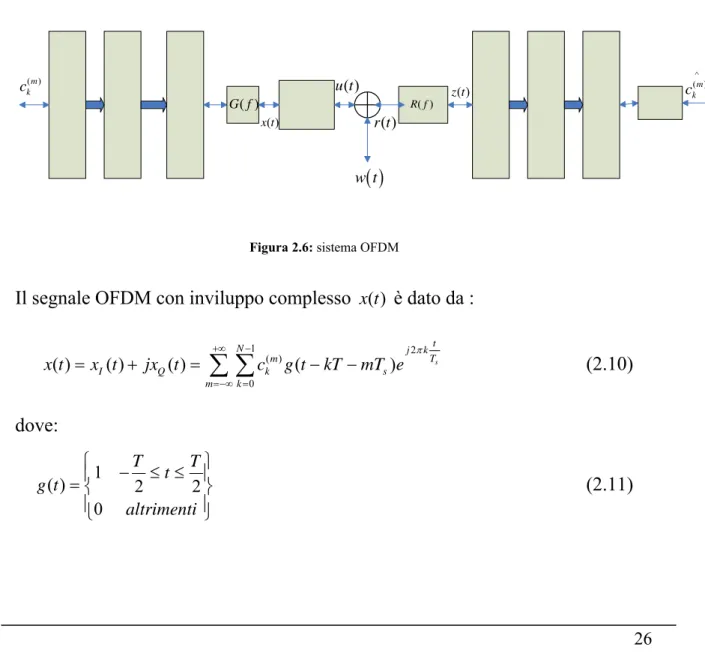
w t ( ) x t ( ) u t ( ) r t ( ) z t ^ ( )m k c ( ) R fFigura 2.6: sistema OFDM
Il segnale OFDM con inviluppo complesso x t( ) è dato da :
1 2 ( ) 0 ( ) ( ) ( ) ( ) s t N j k T m I Q k s m k x t x t jx t c g t kT mT e π +∞ − =−∞ = = + =
∑ ∑
− − (2.10) dove: 1 ( ) 2 2 0 T T t g t altrimenti ⎧ − ≤ ≤ ⎫ ⎪ ⎪ = ⎨ ⎬ ⎪ ⎪ ⎩ ⎭ (2.11)( )m k
c sono i simboli complessi di informazione, indipendenti , equiprobabili, a
media nulla ed appartenenti ad una modulazione lineare M-QAM, quindi:
( ) ( )* , , 0, m l k h P h k m l E c c altrimenti = = ⎧ ⎫ ⎡ ⎤ = ⎨ ⎬ ⎣ ⎦ ⎩ ⎭ (2.12) Il segnale x t( ) all’ingresso del blocco nonlineare senza memoria è composto dalla somma di N contributi indipendenti e identicamente distribuiti. Se N è sufficientemente grande in virtù del teorema del limita centrale, x t( ) può essere considerato un processo gaussiano complesso. Essendo la parte reale ed immaginaria del processo x t( ) entrambe gaussiane e indipendenti, il modulo sarà distribuito secondo Rayleigh:
( )
2 2 2 2 x x x p e ρ σ ρ ρ σ − = (2.13) dove σ è la varianza del processo 2 ( )x t .
Il segnale u t( ) all’uscita del blocco nonlineare può essere scritto nel seguente modo: ( ) ( ) ( ) ( ) u t =K t x t +d t (2.14) HPA
( )
x t
u t
( )
=
K t x t
( ) ( )
+
d t
( )
Figura 2.7: Conseguenza del teorema di Bussgang
Dove d t( ) è un termine di rumore additivo e K t( )è una funzione
termine d t( ) a valor medio nullo e incorrelato dal processo x t( ) all’ingresso
del blocco nonlineare. Media e cross-correlazione del processo d t( ) valgono :
[
( )]
[ ]
( ) ( )[ ]
( )E d t =E u t −K t E x t
*( ) ( ) *( )t ( ) *( ) *( ) ( )
E d t x t⎡⎣ +τ ⎦⎤=E u⎣⎡ x t+τ ⎦⎤−K t E x t x t⎣⎡ +τ ⎤⎦ (2.15)
Utilizzando il corollario 2 del teorema 4 riportato in appendice si ottiene il seguente risultato:
*( ) ( ) 0 E d t x t⎡⎣ +τ ⎤⎦=
[
( )]
0E d t = (2.16)
Il che significa che d t( )è un processo a media nulla, non gaussiano, incorrelato dal processo utile di ingresso x t( +τ).
Si consideri il processo utile x t( ) in ingresso al blocco nonlineare a media nulla e varianza: 1 2 2 0 ( ) N ( s) m k P t g t kT mT N σ +∞ − =−∞ = =
∑ ∑
− − (2.17) La funzione complessa K t( )può essere espressa in serie di Fourier:2 ( ) t j l T l l K t α e π +∞ =−∞ =
∑
(2.18) con: / 2 2 / / 2 1 ( ) T j lt T l T K t e dt T π α − − =∫
(2.19) e quindi il segnale all’uscita del blocco nonlineare può essere scritto come:2 / ( ) ( ) j lt T ( ) l l u t α x t e π d t +∞ =−∞ =
∑
+ (2.20)Con la scelta effettuata per l’impulso sagomatore g t( ) otteniamo
0 K0
α ≈ e αl ≈0,l≠0. (2.21) All’uscita del canale AWGN abbiamo:
( ) ( ) ( )
r t =u t +w t (2.22)
e all’uscita del filtro adattato:
( ) l rl( ) r( ) r( ) l z t α x t d t w t +∞ =−∞ =
∑
+ + (2.23) dove x t d t w trl( ), ( ),r r( )sono, rispettivamente, la risposta del filtro adattato ai segnali ( ) j2 lt T/ , ( ), ( )x t e π d t w t . Dopo la rimozione del prefisso ciclico e
l’operazione di DFT si ottiene, per il generico simbolo OFDM:
[ ]
[
]
[ ]
[ ]
[ ]
[ ]
[ ]
[ ]
[ ]
[ ]
1 1 2 / ( ) 2 / 0 0 0 ( ) ( ) 0 0 ( ) ( ) N N j kn N m j kn N s r k r s r s n n d nr u nd nr m m k nd nr k n T z k z n e c d nT w nT e N z k e k z k e k e k c e k e k c e k π α π α α − − − − = = ⎛ ⎞ = ⎜ ⎟ = + + = ⎝ ⎠ + = + + = + + = +∑
∑
(2.24)I termini enr
[ ]
k e end[ ]
k sono due termini di rumore incorrelati che distorconoil simbolo ricevuto. Il primo è costituito dai campioni di rumore termico dopo l’operazione di DFT e quindi sono campioni di rumore indipendenti e gaussiani. Il termine end
[ ]
k è dato dalla combinazione lineare di N campioni disufficientemente grandi, può essere modellato come un processo gaussiano complesso incorrelato sia dai simboli di informazione ( )m
k
c sia dal termine
[ ]
nr
e k . In questo senso l’operazione di DFT trasforma un’insieme di N
variabili aleatorie complesse in un’insieme di N variabili aleatorie complesse
gaussiane. L’espressione (2.24) indica, quindi, che l’effetto delle distorsioni
nonlineari senza memoria sul segnale è quello di provocare una rotazione, un attenuazione e la presenza di un rumore additivo incorrelato, warping e
clustering.
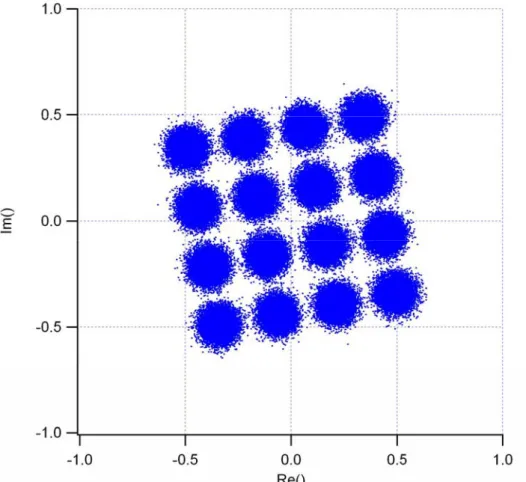
Questi effetti possono essere osservati andando a considerare il diagramma I-Q del segnale all’uscita del calcolatore di FFT:
Il warping consiste nella rotazione rigida di tutta la costellazione, mentre il termine clustering si riferisce alla comparsa di una nuvola di punti intorno alle posizioni nominali, ruotate e attenuate, della costellazione.
2.2.2 –
Prestazioni su canale AWGN nonlineare.
In base a quanto ottenuto nel paragrafo precedente le prestazioni del sistema OFDM su canale AWGN nonlineare possono essere ottenute andando a ricalcolare il rapporto segnale-rumore che tiene conto del rumore nonlineare. Infatti si è detto che tale rumore è incorrelato sia dal rumore termico sia dal segnale utile. La potenza del termine di rumore relativo a ciascun punto della costellazione vale [7]:
[ ]
{
[ ] [ ]
}
⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ = = s n n s n n n n e T k NS T k NS k e k e E k P r r d d n * (2.25)dove Sndnd e Snrnrsono le densità spettrali di potenza dei segnali nd(t)e nr(t).
La potenza del termine utile vale invece:
[ ]
{
[ ] [ ]
}
{
}
⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ = = = s ss m k m k u u z T k NS c c E k z k z E k P u 2 )* ( ) ( 2 * α α (2.26) con[ ]
(m) k u k cz =α e Sssla densità spettrale di potenza del termine utile.
Dalle considerazioni precedenti appare chiaro che le prestazioni in termini di BER relative al k-esimo sottocanale dipendono sia dal rumore nonlineare sia dal rumore termico. Il rapporto segnale-rumore al ricevitore, per la k-esima sottoportante, è generalmente definito come il rapporto tra la potenza del segnale ricevuto e la componente di rumore termico. In seguito questo SNR
verrà chiamato apparente, perché non è l’ unico che va ad influire sulle prestazioni. Infatti, queste ultime, sono determinate dall’ SNR effettivo calcolato in presenza delle distorsioni nonlineari. Esso è definito come il rapporto tra il termine utile zu
[ ]
k e il termine di rumore complessivo en[ ]
k . Siintroduce, inoltre, l’(SNR)nl, cioè il rapporto segnale-rumore al ricevitore in
assenza di rumore termico definito come il rapporto tra il termine utile zu
[ ]
k e[ ]
nd e k . Quindi:[
]
[ ]
[ ]
2 ( ) u nd d d ss z s nl k e n n s k S P k T SNR P k k S T α ⎛ ⎞ ⎜ ⎟ ⎝ ⎠ = = ⎛ ⎞ ⎜ ⎟ ⎝ ⎠ (2.27)Per il rapporto segnale-rumore apparente e effettivo si ha, rispettivamente:
(
)
[ ]
[ ]
[ ]
[ ]
[ ]
0 2 0 d d d u nd nr nr d d s s z z e s app k e e ss n n s s k S P k P k P k T SNR P k P k N k k S S T T N α ⎛ ⎞ ⎜ ⎟ + ⎝ ⎠ ⎡ ⎤ = = = = ⎣ ⎦ ⎛ ⎞ ⎛ ⎞ + ⎜ ⎟ ⎜ ⎟ ⎝ ⎠ ⎝ ⎠ (2.28)[ ]
[ ]
[ ]
[ ]
[ ]
[ ]
[ ]
[
] [
]
1 ( ) ( ) 1 1 1 1 ( ) ( ) ( ) u u u nd nr nd nd z z eff k z e e e e app nl nl app k k k P k P k SNR P k P k P k P k P k SNR SNR SNR SNR − ⎡ ⎤ = = = ⎣ ⎦ + + + ⎧ ⎛ ⎞ ⎫ ⎪ + + ⎪ ⎜ ⎟ ⎨ ⎜ ⎟ ⎬ ⎡ ⎤ ⎪⎣ ⎦ ⎝ ⎠ ⎪ ⎩ ⎭ (2.29)Le prestazioni del sistema non codificato su canale AWGN possono essere valutate mediante la seguente espressione:
0 b err E SER P N ⎛ ⎞ = ⎜ ⎟ ⎝ ⎠ (2.30)
dove Perr
( )
dipende dal particolare schema di modulazione utilizzato e0
(Eb/N ) è il rapporto segnale-rumore per bit su ogni sottoportante ed è legato ai rapporti segnale-rumore calcolati precedentemente, dalla seguente relazione:
0 ( ) b bit E SNR N = n (2.31)
con nbit il numero di bit per simbolo trasmesso su ciascuna sottoportante.
Continua, quindi, ad essere valida l’espressione precedentemente ricavata per i (SNR), cioè: 1 0 0 0 0 1 1 1 1 b b b b eff app app nl E N E E E N N N − ⎧ ⎡ ⎤ ⎫ ⎪ ⎢ ⎥ ⎪ ⎛ ⎞ =⎪ + +⎢ ⎥ ⎪ ⎨ ⎬ ⎜ ⎟ ⎛ ⎞ ⎢ ⎛ ⎞ ⎥⎛ ⎞ ⎝ ⎠ ⎪⎜ ⎟ ⎢ ⎜ ⎟ ⎥⎜ ⎟ ⎪ ⎪⎝ ⎠ ⎢ ⎝ ⎠ ⎥⎝ ⎠ ⎪ ⎣ ⎦ ⎩ ⎭ (2.32)
Per una modulazione M-QAM la (
0 b err E SER P N ⎛ ⎞ = ⎜ ⎟ ⎝ ⎠ ) diventa:[Proakis] 2 0 3 1 1 2 1 b bit E n N M SER Q M M ⎛ ⎛ ⎛ ⎞⎞⎞ ⎜ ⎜ ⎜ ⎟⎟⎟ ⎛ ⎞ ⎜ − ⎜ ⎝ ⎠⎟⎟ = −⎜ ⎜⎜ ⎟⎟ ⎜ ⎟⎟ − ⎝ ⎠ ⎜ ⎜ ⎟⎟ ⎜ ⎜ ⎟⎟ ⎜ ⎝ ⎠⎟ ⎝ ⎠ (2.33)
Dove M =2nbit è il numero di elementi della costellazione M-QAM.
Infine possiamo ottenere le prestazioni del sistema in termini di BER mediante la seguente espressione:
bit
SER BER
n
= (2.34)
2.3 – Sistema OFDM simulato su canale AWGN
nonlineare.
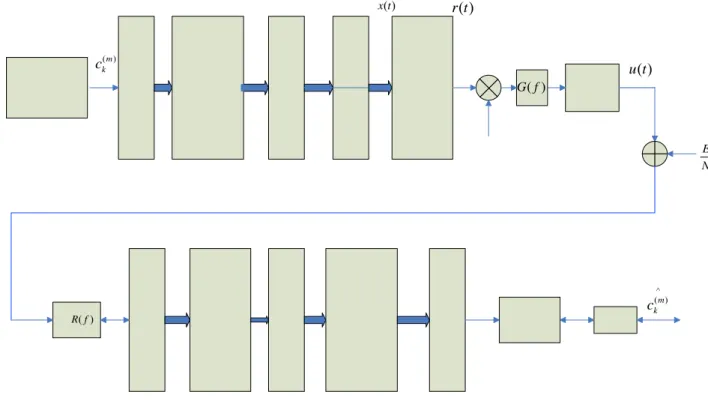
Il simulatore del sistema di trasmissione OFDM realizzato per questa tesi è mostrato in Figura 2.9: ( )m k c ( ) G f ( ) x t ( ) u t ( ) r t ^ ( )m k c ( ) R f 0 b E N
Figura 2.9: Diagramma a blocchi del simulatore
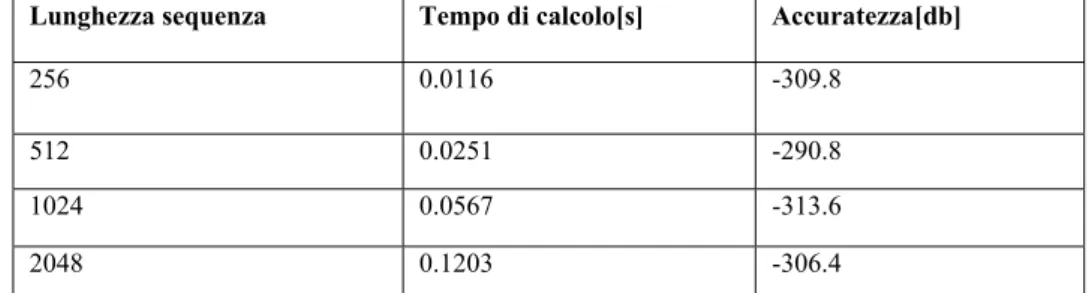
Esso è costituito, analogamente al sistema reale, da un generatore di simboli di informazione appartenenti ad una modulazione M-QAM, i quali vengono inviati in N sottoflussi paralleli al calcolatore di DFT. Per sfruttare il vantaggio dato dalla possibilità di effettuare la modulazione attraverso la DFT (§1.1.2) si è usato un algoritmo veloce per effettuare tale calcolo. In particolare la routine
utilizzata fornisce le seguenti prestazioni di calcolo su sequenze di diversa lunghezza:
Lunghezza sequenza Tempo di calcolo[s] Accuratezza[db]
256 0.0116 -309.8
512 0.0251 -290.8
1024 0.0567 -313.6
2048 0.1203 -306.4
Test eseguito su 486DX@50Mhz
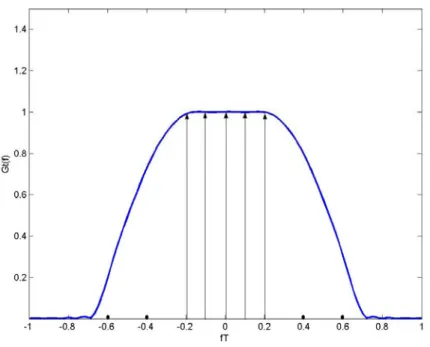
La conversione D/A è stata realizzata attraverso un filtro a radice di coseno rialzato con roll-off α =0.2(RRCR-α):
Figura 2.10: Impulso RRCR
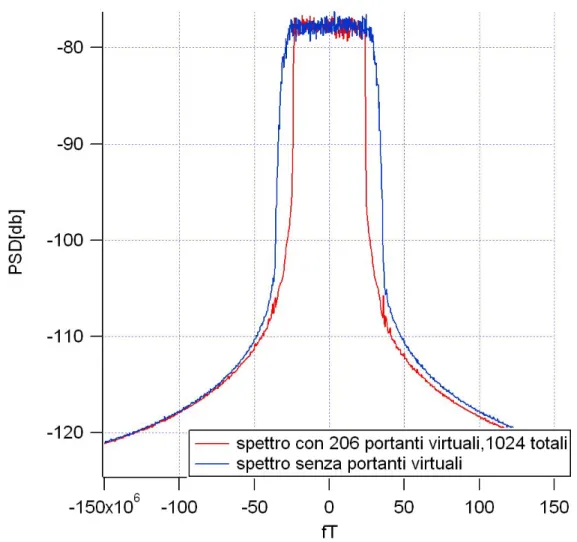
Per fare in modo che lo spettro del segnale non venga distorto dal filtro RRCR, vengono utilizzate Nv =αN portanti virtuali per forzare lo spettro di potenza a
Figura 2.11: Uso delle portanti virtuali
Inoltre, poiché la routine che calcola la IFFT fornisce la prima sottoportante in 0
f = , è stato necessario traslare il set di sottoportanti ortogonali della quantità
(N−1) / 2 in modo tale che la prima portante utile risulti in corrispondenza della frequenza − −(1 α) / 2T. Nella Figura 2.12 è messo a confronto lo spettro del segnale generato dal simulatore con e senza portanti virtuali, che aiuta a chiarire quanto si è detto.
Figura 2.12: Spettro con e senza portanti virtuali
Le densità spettrali di potenza (PSD, Power Spectral Density) in Figura 2.12, come tutti gli spettri presenti in questa Tesi, sono stati stimati utilizzando il metodo della media dei periodogrammi con finestra di Kaiser-Bessel.
In accordo a quanto detto in § 2.2.1, il segnale all’uscita della IFFT può essere considerato un segnale gaussiano complesso. Di seguito sono riportate le distribuzioni della parte reale del segnale e del modulo insieme alle densità di probabilità gaussiana e di rayleigh , rispettivamente, a parità di parametri caratteristici delle due distribuzioni.
Figura 2.13: distribuzione della componente in-fase del segnale OFDM
Per comprendere quali siano gli effetti delle distorsioni nonlineari sul segnale consideriamo il diagramma I-Q del segnale all’uscita del demodulatore. Infatti a differenza del sistema monoportante non è possibile valutare tale effetto sul segnale all’uscita del HPA poiché a causa della presenza della IFFT il diagramma I-Q non mostrerebbe una struttura similare a quella della costellazione usata in trasmissione. Di seguito sono riportati i diagrammi I-Q per una modulazione 16-QAM a due diversi OBO :
Figura 2.16: Diagramma I-Q per modulazione 16-QAM e OBO=5.51dB
Come si può notare tutti i simboli della costellazione subiscono la stessa distorsione per un dato OBO. Al variare dell’OBO invece le due costellazioni subiscono un attenuazione e una rotazione diversa. In particolare al diminuire dell’OBO, quindi maggiore livello di nonlinearità, la costellazione subisce una rotazione più grande. Il fatto che tutti i simboli della costellazione subiscano la stessa distorsione è in accordo con quanto detto in § 2.2.1 e cioè che tutti i simboli subiscono la distorsione dovuta alla costante complessa k t( ) (warping) e la presenza del rumore additivo nonlineare d t( ) incorrelato con il processo
( )
r t (clustering).
Gli stessi risultati si ottengono all’aumentare dei livelli della costellazione, come si può verificare osservando il diagramma I-Q per una costellazione 64-QAM:
Anche in questo caso i simboli a più alto livello energetico vengono distorti allo stesso modo di simboli a livello energetico più basso. Come sarà mostrato nel prossimo paragrafo nel sistema monoportante non si ottiene lo stesso risultato.
Questo avviene perché le statistiche del segnale OFDM non dipendono dal tipo di costellazione. Come detto precedentemente il segnale x t( ) può essere considerato, in virtù del teorema del limite centrale, un processo gaussiano complesso e perché questo sia valido è sufficiente che N sia sufficientemente
grande. Nei sistemi di comunicazione che utilizzano la modulazione OFDM, questa condizione non presenta una limitazione in quanto N è dell’ ordine del
migliaio.
Si è inoltre verificato che, come detto in § 2.1.1, il rumore end
[ ]
k abbiadistribuzione gaussiana:
Figura 2.19:
Come si vede dalla Figura 2.9 dopo il calcolatore di FFT e prima del decisore a minima distanza si trova il blocco AGC (Automatic Gain Control) che permette di recuperare la fase e l’ ampiezza dei simboli trasmessi. Nel caso delle modulazioni multiportante l’ AGC non fa altro che scalare tutti i simboli
della stessa quantità, α (2.21), e ruotare rigidamente la costellazione di una 0
quantità pari a arg
[ ]
α0 . Ciò non risulta vero nel caso di segnali monoportantiperché in questo caso i vari simboli devono essere scalati e ruotati in maniera differente a seconda della propria ampiezza. Il dispositivo utilizzato in questo simulatore opera in modo non coerente, non aiutato dai dati e a massima verosimiglianza ed è quindi un ‘ML NDA-AGC non coerente’ (Maximum
Likelihood Non Data Aided Automatic Gain Control) [8]. Per rendersi conto
dell’ effetto dell’ AGC sul segnale tempo discreto in uscita dalla FFT consideriamone il diagramma I-Q:
Figura 2.20: Diagramma I-Q del segnale all’ uscita dell’AGC
All’uscita dell’ AGC la costellazione risulta rigidamente ruotata e scalata in modo tale che i baricentri dei vari cluster si trovino nelle posizioni nominali. Un altro effetto delle distorsioni nonlineari è la distorsione dello spettro in uscita all’ HPA. Infatti osservando la seguente figura:
Figura 2.21:Spettro del segnale in uscita dall’ HPA@TWT per diversi valori dell’ OBO
Si può notare che utilizzando, nella catena di trasmissione, un amplificatore a TWT con OBO=4.9dB si verifica un innalzamento delle code dello spettro che
risulta essere tanto più importante quanto più il back-off è basso. Questo fatto può comportare dei problemi qualora si immagini di effettuare contemporaneamente diverse trasmissioni a banda larga, come quella descritta finora, utilizzando per ciascuna una diversa frequenza della portante. Infatti la presenza di una frazione cospicua della potenza del segnale fuori della banda
principale del segnale OFDM può comportare l’ insorgere di interferenza con
i canali adiacenti .
Vediamo adesso di capire quali siano gli effetti di un dispositivo nonlineare sulla BER (Bit Error Rate) del sistema. I risultati che vengono mostrati sono
stati ottenuti attraverso un simulatore basato sulla Figura 2.9, utilizzando come filtro sagomatore un impulso a radice di coseno rialzato con α =0.2. Tale filtro è la versione discreta di quello in Figura 2.10 avendo considerato, però, una durata in intervalli di segnalazione pari a 20 e un fattore di sovracampionamento pari a 10 campioni per intervallo di segnalazione. Il fattore di sovracampionamento è stato introdotto per simulare quanto più fedelmente possibile il segnale all’ uscita del filtro sagomatore rispetto a quello che si ha all’ uscita del convertitore D/A in un sistema hardware reale. I risultati delle simulazioni mostrano che le prestazioni del sistema non dipendono dal numero di sottoportanti utilizzato. In Figura 2.22 è mostrata la BER per sistemi con 1024,512,256 sottoportanti per OBO=5dB e come si può
notare esse coincidono entro i limiti dovuti alla precisione nell’ imporre lo stesso OBO per i tre casi.
Figura 2.22:BER al variare della dimensione del blocco OFDM
Si fa notare che l’ indipendenza della BER dalla dimensione del blocco è valida quando viene rispettata la proporzione tra il numero di portanti totali e
quello di portanti virtuali. Infatti variando tale proporzione, anche per la stessa dimensione del blocco N, si ottengono prestazioni differenti.
Figura 2.23: BER con e senza portanti virtuali
La figura 2.23 mostra la differenza che si ha nelle prestazioni del sistema con e senza portanti virtuali nel caso di N =1024 e Nv=αN approssimato per
eccesso all’ intero pari più vicino. La differenza è dovuta al fatto che utilizzando le portanti virtuali si elimina quella parte di interferenza intersimbolica che si avrebbe se i fianchi dello spettro dell’ impulso a radice di coseno rialzato non fossero stati “smussati”.
Nella Figura 2.24, vengono riportate alcune curve di BER ottenute a diversi OBO per una modulazione 16-QAM utilizzando blocchi di dimensione
1024
N = e Nv =206 portanti virtuali.
Si può notare come per valori di OBO bassi la relativa curva tende a rimanere costante al variare di 0 b app E N ⎛ ⎞ ⎜ ⎟
dall’OBO. Ciò significa che per tali valori di OBO è il rumore nonlineare a fissare le prestazioni del sistema, cioè
0 0 b b eff nl E E N N ⎛ ⎞ ⎛ ⎞ ≅ ⎜ ⎟ ⎜ ⎟ ⎝ ⎠ ⎝ ⎠ (2.32) .
2.4 – Caratteristica del trasferimento di potenza per
segnali multiportante
Le caratteristiche ingresso-uscita presentate precedentemente per gli HPA, sono valide quando al loro ingresso si ha un segnale sinusoidale. Nel caso, invece, di segnale multiportante, la caratteristica ingresso uscita risulta diversa. Calcoliamo la potenza del segnale in uscita dall’HPA in funzione della potenza del segnale al suo ingresso nel caso di segnali multiportante. La potenza del segnale in uscita vale:
( )
( )( ) ( )
2 2 2 0 ( ) j x x out x x x x P E u t E A e p A d ϕ φ ρ ρ ρ ρ ρ ⎡ + ⎤ ⎣ ⎦ ∞ ⎡ ⎤ ⎡ ⎤ = ⎣ ⎦= ⎢ ⎥= ⎣ ⎦∫
(2.35)Dove p
( )
ρx è la pdf (probability density function) del modulo del segnale x t( )(2.13). Considerando che 2 2
in
P = σ la (2.35) può essere riscritta come:
( )
2 2 2 2 2 2 x x x x Pin x in p e e P ρ ρ σ ρ ρ ρ σ − − = = (2.36)Sostituendo, quindi, la (2.36) nella (2.35) si ottiene la caratteristica di trasferimento di potenza di un HPA quando al suo ingresso vi è un segnale multiportante: 2 2 2 ( ) ( ) x in P x out in x x in P P e A d P ρ ρ − ρ ρ =
∫
(2.36)Nella figura successiva la (2.36) è rappresentata insieme alla curva di trasferimento di potenza valida nel caso di segnale monoportante:
Figura 2.25: Caratteristiche del trasferimento di potenza
Come si può notare dalla Figura 2.25 nel caso di segnale multiportante non esiste nessun valore della potenza di ingresso Pin, quindi dell’IBO, che fornisca
in uscita una potenza pari a Pout,maxe quindi un OBO=0db. Intuitivamente si
capisce che, anche essendo la potenza media in ingresso pari a Pin,max, a causa
dell’ alta variabilità dell’inviluppo complesso del segnale OFDM, la potenza istantanea in uscita dall’HPA non sarà sempre uguale a quella massima e quindi la Pout( potenza media in uscita) sarà minore di Pout,max e questo da luogo
2.5 –
Differenza con il sistema monoportante
Per capire quale sia la differenza sostanziale dovuta all’effetto delle distorsioni nonlineari sul sistema monoportante rispetto a quello multiportante consideriamo, analogamente a quanto gia fatto in precedenza, il diagramma I-Q del segnale ricevuto prima che entri nel AGC (Automatic Gain Control) (Figura 2.26). Di seguito si riportano i diagrammi I-Q per il sistema monoportante e multiportante rispettivamente:
Figura 2.27: Diagramma I-Q del sistema monoportante con OBO=3dB
Figura 2.29: Diagramma I-Q ,64-QAM, monoportante, OBO=7dB
Come si può notare nel caso di sistemi monoportante i simboli sono distorti in maniera differente a seconda della loro ampiezza. Per esempio i quattro simboli ad ampiezza minore si trovano abbastanza vicini alle loro posizioni nominali, benché attenuati, mentre quelli ad ampiezza maggiore risultano maggiormente ruotati e attenuati. Inoltre, a differenza del caso multiportante dove un rumore additivo e gaussiano si sovrappone al baricentro dei simboli ricevuti andando a costituire una nuvola di punti circolare, nel caso monoportante la nuvola di punti assume forma diversa a seconda del simbolo che si consideri e ciò indica una certa correlazione tra il rumore nonlineare e il simbolo trasmesso, mentre nel caso multiportante questi ultimi sono incorrelati. La differenza tra i due sistemi è dovuta alla presenza della IFFT che realizza una combinazione lineare dei simboli al suo ingresso e, che per N
sufficientemente grandi, permette di considerare il segnale alla sua uscita un processo gaussiano complesso. In virtù del teorema di Bussgang e degli altri teoremi riportati in appendice, in uscita dalla nonlinearità si avrà un rumore additivo, non correlato con il segnale OFDM, che colpisce nella stessa maniera tutti i simboli della costellazione e una rotazione rigida della costellazione secondo la costante complessa α . 0
APPENDICE 1
Non linearità passabanda senza memoria con
ingresso gaussiano non stazionario
In questa appendice vengono forniti alcuni teoremi utili a caratterizzare l’uscita di una nonlinarità passabanda senza memoria quando al suo ingresso si ha un processo gaussiano non stazionario. Per la dimostrazione dei teoremi che seguono si può fare riferimento a [6].
Si considerino le variabili aleatorie (VA) x,y,ξ ,η , con xe ξ congiuntamente
gaussiane con valor medio β e x β e covarianza ξ μ , xξ y e η congiuntamente
gaussiane, indipendenti da x e ξ , con valor medio β e y β e covarianza η yη
μ . Per due funzioni generiche, c x y
( )
, e γ ξ η(
,)
definiamo le seguentiquantità:
( )
,J = ⎣E c x y⎡ ⎤⎦ I = ⎣E c x y⎡
( ) ( )
, γ ξ η, ⎤⎦ (A.1.1)Teorema 1: se c x y f
( ) ( )
, xy x y, tende a 0 quando x tende a infinito(⎡⎣fxy
( )
x y, = f x fx( ) ( )y y ⎤⎦ è la pdf congiunta delle VA x,y), allora( )
, x c x y J E x β ⎡∂ ⎤ ∂ = ⎢ ⎥ ∂ ⎣ ∂ ⎦ (A.1.2)Se c x y f
( ) ( )
, xy x y, tende a zero quando y tende a infinito allora( )
, y c x y J E y β ⎡∂ ⎤ ∂ = ⎢ ⎥ ∂ ⎣ ∂ ⎦ (A.1.3)Teorema 2(teorema di prince): Se c x y( , ) ( , )γ ξ η fxξ( , )x ξ fyη( , )y η tende a 0 quando x o ξ tende a infinito fxξ( , )x ξ e fyη( , )yη sono le pdf congiunte delle
VA x , ξ e y,η rispettivamente], allora ( , ) ( , ) x I c x y E x ξ γ ξ η μ ξ ⎡ ⎤ ∂ ∂ ∂ = ⎢ ⎥ ∂ ⎣ ∂ ∂ ⎦ (A.1.4) Se c x y( , ) ( , )γ ξ η fxξ( , )xξ fyη( , )y η tende a 0 quando yo η tende a infinito, allora ( , ) ( , ) x I c x y E y ξ γ ξ η μ η ⎡ ⎤ ∂ ∂ ∂ = ⎢ ⎥ ∂ ⎣ ∂ ∂ ⎦ (A.1.5)
Si consideri adesso un sistema nonlineare senza memoria con ingresso ( ) ( ) ( )
i t =x t + jy t e uscita u t( )e con caratteristica ingresso-uscita
[
]
[
]
[
]
( ) I ( ), ( ) Q ( ), ( ) ( ), ( )
u t =F x t y t + jF x t y t =F x t y t (A.1.6)
Si assume i t( )come un processo casuale gaussiano con componenti in fase e in quadratura statisticamente indipendenti e valor medio βx( )t + jβy( )t . Il seguente teorema caratterizza l’uscita u t( ) del sistema nonlineare senza memoria appena descritto.
Teorema 3: Se almeno una delle condizioni:
a) E F x y( , ) jE F x y( , ) x y ⎡ ⎤ ∂ ∂ ⎡ ⎤ = − ⎢ ⎥ ⎢ ∂ ⎥ ∂ ⎣ ⎦ ⎣ ⎦ b) E x t x t
[
( ) ( +τ)]
−βx( ) (t βx t+τ)=E y t y t[
( ) ( +τ)]
−βy( ) (t βy t+τ)È vera, allora *( ) ( ) *( ) ( ) ( ) *( ) ( ) ( , ) E u t i t⎡⎣ +τ ⎦⎤=K t E i t i t⎡⎣ + −τ β t β t+τ ⎤⎦+C t τ (A.1.7) Dove 1 ( , ) ( , ) ( ) 2 F x y F x y K t E j x y ⎡∂ ∂ ⎤ = ⎢ − ⎥ ∂ ∂ ⎣ ⎦ (A.1.8)
È un numero complesso che non dipende da τ , e
*
( , ) ( ) ( )
C t τ =E u t⎡⎣ ⎤⎦β t+τ (A.1.9)
Corollario 1(Teorema di Bussgang per nonlinearità passabanda senza memoria): Se β( ) 0t = ,
quindi la condizione (b) del teorema 3 diventa E x t x t
[
( ) ( +τ)]
=E y t y t[
( ) ( +τ)]
,e il processo di ingresso i t( ) è un processo stazionario, allora
* * *
0
( ) ( ) ( ) ( )
E u t i t⎡⎣ +τ ⎤⎦=K E i t i t⎡⎣ +τ ⎤⎦ (A.1.10)
Dove K t0( )=K t( )| ( ) 0β t= =K0 è una costante complessa che non dipende ne da t
ne da τ .
Teorema 4: Può essere dimostrato che:
[ ]
* 1 1 ( , ) ( ( , ) ( ) ( ) ( ) ( ) ( ) 2 F x y F x y E u t K t t E J t C t x x β ⎡∂ ∂ ⎤β = + ⎢ + ⎥ + ∂ ∂ ⎣ ⎦ (A.1.11)Se la condizione (a) del teorema 3 è vera, allora
[ ]
( ) ( ) ( ) 1( )Con K t( )definita in (A.1.8) e C t1( ) 0=
Corollario 2: Se la condizione (a) del teorema 3 è vera, allora
*( ) ( ) *( ) *( ) ( )
E u t i t⎡⎣ +τ ⎤⎦=K t E i t i t⎡⎣ +τ ⎤⎦ (A.1.13)
Il teorema di Bussgang può essere generalizzato anche al caso di ingresso non stazionario considerando che la costante K0 diventa una funzione non costante