Introduzione ... 3
1
Misura della velocità con sistemi contactless ... 4
1.1 Misura con sistemi Doppler ... 4
1.2 Misura con sistemi di radioposizionamento... 11
1.3 Misura utilizzando il metodo del tempo di volo ... 13
2
Principi fisici, specifiche e struttura del sistema...17
2.1 Richiami di acustica ... 17
2.2 Principio di misura ... 23
2.3 Cenni sulla fluidodinamica intorno alla vettura... 26
2.3.1 Strato limite idrodinamico... 27
2.3.2 Lastra piana parallela alla corrente del fluido (richiamo) ... 29
2.3.3 Moto del fluido (aria) fra il pianale dell’auto e la strada ... 33
2.4 Limiti fisici del metodo di misura usato ... 40
2.5 Struttura in generale dell’apparecchiatura e sua installazione ... 42
2.6 Accorgimenti realizzativi... 45
2.7 Specifiche tecniche per la fase realizzativa... 47
2.7.1 Specifiche sulla dinamica... 47
2.7.2 Specifiche sul periodo di campionamento ... 47
2.7.3 Specifiche sulla risoluzione ... 49
2.7.4 Specifiche sull’accuratezza ... 56
2.7.5 Specifiche sulle modalità di alimentazione... 61
3.1 Diaframmi vibranti e trasduttori elettromeccanici ... 62
3.2 Altoparlante e sua caratterizzazione in frequenza... 70
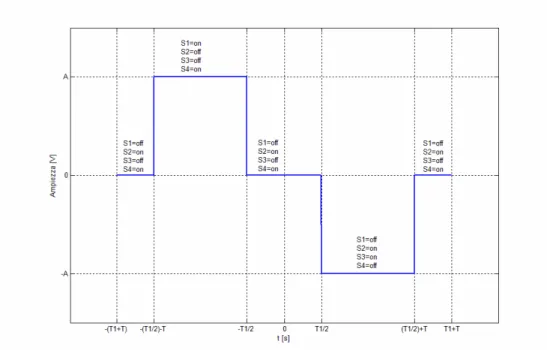
3.3 Il segnale di pilotaggio e architettura del blocco di potenza... 81
3.4 Filtro di accoppiamento fra MOSFET di potenza e altoparlante ... 100
3.5 Simulazione numerica della parte analogica... 112
4
Sottosistema di ricezione...115
4.1 La misura del tempo di volo e il metodo decisionale... 115
4.2 Specifiche Microfono... 132
4.3 Front-end analogico, filtro e decisore ... 134
4.4 Simulazione numerica del blocco di ricezione... 145
5
Unità di elaborazione ...150
5.1 Unità di elaborazione ... 150
5.2 Report firmware e implementazione metodo di calcolo ... 152
5.3 Possibili miglioramenti e direzione di lavoro ... 158
6
Collaudo ...160
6.1 Collaudo sottosistema di trasmissione ... 160
6.2 Collaudo sottosistema di ricezione ... 162
7
Conclusioni...166
Bibliografia ...169
Introduzione
La misura della velocità in un veicolo, rispetto al riferimento rappresentato dal terreno, è generalmente ricavata dalla misura della velocità di rotazione delle ruote, utilizzando vari tipi di sensori (magnetici, ottici ecc) applicati direttamente alle ruote o su organi meccanici rigidamente collegati alle ruote stesse.
Quello che interessa conoscere è la velocità del mezzo rispetto al terreno: il modello fisico che descrive il sistema terreno-ruota ha dei parametri che hanno una certa varianza rispetto al loro valor medio conosciuto (si pensi alle tolleranze di lavorazione) e inoltre è tempovariante sia nel lungo periodo (mesi), sia nel medio periodo (ore), che nel breve periodo (secondi): si pensi alle usure dei pneumatici, al cambiamento della loro pressione con la temperatura o addirittura al caso di slittamento fra ruota e terreno.
La misura della velocità rispetto al terreno (detta comunemente TSOG, True Speed Over Ground) è utile anche per rilevare se, e di quanto, una ruota stia muovendosi slittando.
Pertanto argomento di questa tesi sarà quello di studiare un sistema di misura della velocità che non utilizzi un contatto fra il mezzo di cui si vuol misurare la velocità e il terreno (un sistema di misura siffatto è detto “contactless”), realizzato inoltre con componentistica idonea a ottenere un sistema di basso costo.
1 Misura della velocità con sistemi contactless
In questo capitolo vengono brevemente descritti i principali sistemi per la misura della velocità di un veicolo con metodologia contactless, con riferimenti sia a prototipi sperimentali che a sistemi disponibili in ambito commerciale. Dopo una breve descrizione del principio fisico adottato da ogni particolare famiglia di sistemi, sono riportati riferimenti a realizzazioni specifiche, sia in termini di metodi implementativi che come caratteristiche di risoluzione, precisione ed efficienza in generale.1.1 Misura con sistemi Doppler
La misura della velocità tramite effetto Doppler si basa sul noto principio fisico. Si consideri un sistema di riferimento solidale al mezzo nel quale si propagano le onde e una sorgente/ricevitore puntiforme P che emette onde sferiche con frequenza f0 e che si muove con velocità vp lungo l’asse x (figura 1.1).
Il segnale trasmesso a t0 in x0 colpisce la superficie del terreno e una parte del
figura 1.1: misura della velocità di P usando l'effetto Doppler Con la condizione 0 p V d f
>> (in tal caso
0
' Vp cos
d d
f α
− ≈ ⋅ ), se il terreno ha delle
rugosità di dimensioni confrontabili con la lunghezza d’onda (in modo che l’onda sia riflessa con scattering, ovvero il terreno non si deve comportare come uno specchio acustico o ottico, altrimenti a t1 in x1 non si riceverebbe alcun segnale),
l’onda ricevuta in P avrà una frequenza fR legata a quella di partenza dalla
relazione (1.1) (c è la velocità di fase dell’onda nel mezzo considerato), ovvero la velocità è legata alla frequenza del segnale ricevuto da una relazione di tipo lineare. La relazione (1.1) è valida sia per un’onda acustica che per un’onda elettromagnetica. 2 cos R d p d f f f f V f c α = + ∆ ⋅ ⋅ ⋅ ∆ = (1.1) 1
Le caratteristiche fisiche della superficie di scattering (asfalto o comunque un terreno che possa essere percorso da un’autovettura) impongono di usare dei sistemi a ultrasuoni nel caso di onde acustiche e sistemi a qualche decina di gigahertz nel caso di onde elettromagnetiche, per poter avere scattering.
Sistemi di questo tipo sono stati realizzati sia in forma di prototipi (si veda a tal proposto i riferimenti [2], [3], [4], [5] riportati in bibliografia), che per essere destinati alla commercializzazione.
Utilizzando un sistema misto a ultrasuoni (per velocità fino a 30 km/h per rendere trascurabile l’influenza del vento) e a microonde (per velocità maggiori di 30 km/h) per una distanza complessiva percorsa dall’onda di 1 m, sono stati ottenuti in [3] i risultati riportati in tabella 1.1; in particolare l’errore risulta principalmente dovuto alla distribuzione statistica dello scattering provocato dalla superficie del terreno e risulta grosso modo proporzionale al rapporto fra lunghezza d’onda e distanza percorsa dall’onda (l’errore dovuto alla variabilità dell’altezza da terra e di conseguenza dell’angolo di impatto è eliminato dal cosiddetto principio di Janus, ovvero si utilizza una configurazione con due sensori in cui un sensore è rivolto in avanti e l’altro indietro, in modo che l’effetto dell’angolo si faccia sentire in maniera opposta nei due sensori).
In un altro lavoro, si veda [4] per maggiori dettagli, sono stati usati sensori elettromagnetici a 61 GHz in configurazione di “Janus”, con un sistema di rilevazione della frequenza Doppler basato su una FFT eseguita sul segnale da un DSP (l’autore ha utilizzato un Motorola DSP 56000, 24 bit a virgola fissa), previa
demodulazione sincrona eseguita con il segnale trasmesso e conversione A/D (in questo caso la frequenza Doppler va da 0 kHz per velocità nulla, fino a 20 kHz per velocità di 250 km/h).
tabella 1.1: errore medio sperimentale riportato in [3]
Tipo di sensore Lunghezza d’onda Errore relativo medio
10 GHz microonde 3 cm 1,5 – 3%
24 GHz microonde 1,25 cm 1,0 – 2%
80 kHz ultrasuoni 4,13 mm 0,8 – 1,5%
200 kHz ultrasuoni 1,65 mm 0,5 – 1,2%
Secondo l’autore infatti i sistemi “classici” di rilevamento della frequenza (ad esempio valutando l’attraversamento per zero) per questo sistema tendono a dare scarsi risultati in presenza di asfalto bagnato o ghiacciato, mentre un sistema basato su FFT fornisce risultati migliori e può essere ulteriormente migliorato introducendo un filtraggio numerico sui campioni del segnale, per evidenziare la componente utile del segnale (ovvero la frequenza del segnale demodulato) sul rumore.
L’alta frequenza del segnale (61 GHz) viene scelta sia per avere una piccola dimensione dei componenti radianti che una elevata attenuazione da parte dell’ambiente circostante, in modo da minimizzare le mutue interferenze.
(questo in base al contenuto frequenziale del segnale velocità del veicolo), ne deriva un intervallo temporale sul quale eseguire la FFT di 40 ms: l’autore ha ottenuto un risultato, in termini di accuratezza, con errore medio dell’ordine dello 0,35% rispetto a un sistema di riferimento costituito da una ruota di Peiseler (con risoluzione di 1000 impulsi per giro, il raggio della ruota però non è citato), errore che diminuisce nel caso di utilizzo su strade asciutte; possibili miglioramenti consistono in un procedimento di media dei campioni oppure nell’utilizzo di un filtro di Kalman il quale ha permesso una diminuzione del rumore di un fattore 1,5.
Commercialmente esistono soluzioni che sfruttano l’effetto Doppler, ad esempio il “Delta speed sensor DRS 1000” prodotto dalla GMH Engineering (si veda [6], [7]). Si tratta di un dispositivo che integra in un contenitore (rappresentato in figura 1.2 e adatto a essere installato in ambienti sottoposti ad agenti atmosferici) l’antenna, la sezione a radiofrequenza e l’elettronica di controllo, che necessita di essere solamente alimentato e che fornisce in uscita un’onda quadra con frequenza fondamentale pari al doppio della frequenza Doppler ∆fd (quindi proporzionale
alla differenza di velocità fra il luogo in cui è installato e l’oggetto che ha scatterato l’onda, in generale l’asfalto, come nel montaggio in [8]).
Il “Delta speed sensor DRS 1000” può essere anche montato fisso rispetto al terreno ed, in questo caso, misura la velocità di un oggetto in movimento, come in [9], dove è riportato un esempio a tal proposito.
figura 1.2: immagine del DRS 1000 prodotto dalla GMH Engineering [6]
tabella 1.2: specifiche DRS 1000 prodotto dalla GMH Engineering [6]
Intervallo di misura della velocità 0,5-215 m/s
Frequenza di funzionamento 35,5 GHz
Traslazione di frequenza dovuta all’effetto Doppler (sensore montato con un angolo di 30° rispetto al terreno)
236 Hz
d p
f V
∆ = ⋅
Errore relativo in condizioni ideali
(
0.34 0.0023)
%p
V
± ⋅
Tensione di alimentazione in DC 10,5-16 V
Potenza assorbita 2,4 W
Frequenza segnale di uscita 2⋅ ∆fd Hz
Si noti che l’errore dipende dalla conoscenza dell’angolo fra il centro del fascio dell’onda e il piano della superficie sulla quale si muove l’autoveicolo (figura 1.3): infatti, a parità di velocità, la traslazione in frequenza dovuta all’effetto
Doppler (shift Doppler) dipende linearmente dal coseno dell’angolo suddetto, pertanto cambiamenti dell’angolo di offset (dovuto ad esempio a oscillazioni della scocca che è normalmente è collegata alle ruote con un sistema di sospensioni) producono un errore dovuto al fatto che, nel legame fra velocità e frequenza, si considera un angolo fisso (altrimenti, se fosse possibile conoscere la variazione dell’angolo in tempo reale, si potrebbe eliminare questo errore).
Per migliorare l’accuratezza della misura si può utilizzare (previa una conversione A/D) un filtraggio numerico adatto (cosa che sta divenendo sempre più comune anche in sistemi di basso costo).
figura 1.3: tipica installazione del DRS 1000
La disponibilità di sensori a radiofrequenza efficienti, economici e affidabili che lavorano a qualche decina di gigahertz, (ad esempio realizzati in forma sperimentale con antenne a microstricia e transistori HEMTs, si veda ad esempio [10] e [11]), è comunque un requisito per l’affermazione di un sistema commerciale da adottare su larga scala per sistemi automotive.
1.2 Misura con sistemi di radioposizionamento
I moderni sistemi di radioposizionamento (tipo GPS ecc) permettono di conoscere la posizione del ricevitore sulla superficie terrestre grazie ai segnali irradiati da una popolazione di satelliti orbitanti a bassa quota: dalla conoscenza dell’orario (contenuto nell’informazione trasmessa da ogni satellite che a sua volta lo ricava da un orologio atomico), dell’orbita di ogni satellite e dall’individuazione dell’istante di arrivo del segnale emesso da ogni satellite (in generale ne bastano tre, ma più sono e più l’accuratezza aumenta) il ricevitore è in grado di determinare la sua posizione: pertanto, utilizzando i dati sulla posizione al variare del tempo, è possibile ricavare la velocità.
La risoluzione sulla posizione di un tipico sistema GPS arriva a 1 cm con un’accuratezza (che dipende sostanzialmente dall’incertezza sull’istante di arrivo del segnale dal satellite i-esimo al ricevitore e dalla variabilità delle condizioni atmosferiche che influenzano la velocità di fase dell’onda elettromagnetica irradiata dai satelliti stessi) di 3 m al 95% CEP2 (1,8 m utilizzando DGPS, ovvero un sistema GPS che utilizza anche un segnale di riferimento emesso da un punto fisso sulla superficie terrestre, ovviamente di posizione nota): l’accuratezza sulla posizione, se sono usati direttamente i dati sulla posizione riferiti al tempo in cui sono stati calcolati, si ripercuote sulla misura della velocità che pertanto risulta
2 CEP sta per Circle Error Probabile, significa che al 95% la posizione vera è contenuta in un
affetta da un rumore di fondo elevato.
Tuttavia, dato che la densità spettrale di potenza dell’errore è concentrata a frequenze molto basse, ovvero l’errore che affligge due misure vicine nel tempo è statisticamente molto correlato, in una misura di velocità con intervalli di aggiornamento frazioni di secondo si fa sentire meno: detta X(t) la posizione, in una dimensione per semplicità, e V(t) la velocità, si ha la (1.2)
( )
1 0( )
1( )
0( )
1( )
1 1 0 1 0 1 0 ( ) ( ) GPS GPS GPS X t X t x t x t X t X t V t t t t t t t − ∆ − ∆ − = = + − − 0 − (1.2)quindi in base alla correlazione statistica di ∆x t
( )
1 e ∆x t( )
0 , nell’intervallo ditempo indicato, la misura è più o meno accurata.
Possono poi essere adottati sistemi di filtraggio numerico per limitare tale rumore, da semplici filtri che effettuano una media, fino a implementazioni più complesse. A livello commerciale la società Corrsys-Datron produce un sistema di misura di velocità completo di interfacce per la comunicazione basato sul rilevamento GPS ([12]), che è dichiarato avere le caratteristiche riportate in tabella 1.3.
tabella 1.3: specifiche MicroSat prodotto dalla Corrsys-Datron [12]
Intervallo di misura della velocità 0,1-1,850 km/h
Risoluzione 0.01 km/h
Accuratezza 0,1 km/h
Frequenza di aggiornamento della misura
Altri (si veda [13]) ricavano la misura della velocità dalla traslazione della frequenza del segnale ricevuto causata dall’effetto Doppler, con risultati simili a quelli di tabella 1.3, ma con una frequenza di aggiornamento della misura fino a 100 Hz.
Questi sistemi sono stati pensati però per utilizzo in condizioni particolari (ad esempio per test da parte di case costruttrici ecc), sono molto costosi e ingombranti.
Ci sono situazioni poi, in cui il segnale non può essere ricevuto o viene ricevuto male a causa di ostacoli frapposti fra l’antenna ricevente e i satelliti del sistema GPS, rendendone non visibili alcuni di quelli che dovrebbero esserlo in quel momento in quel punto (in ogni zona del mondo con il cielo libero è assicurata la visione di almeno 4 satelliti), situazione che si verifica, ma non solo, nelle gallerie: in tali condizioni, pertanto, non può essere conosciuta la velocità nemmeno con l’accuratezza di cui il sistema è capace, oppure le prestazioni del sistema decadono peggiorando ancora di più l’accuratezza.
Un nuovo sistema di radioposizionamento, che dovesse essere messo all’opera (vedi Galileo e altri) con eventualmente caratteristiche di accuratezza migliori, manterebbe il problema della necessità di una visibilità su una vasta porzione di cielo per poter funzionare correttamente, con le conseguenze che questo comporta.
1.3 Misura utilizzando il metodo del tempo di volo
effettuata sfruttando il fatto che un’onda meccanica viene trasportata dal flusso del fluido stesso (il cosiddetto “drift effect”).
Un’onda meccanica si propaga grazie alla vibrazione rispetto a una posizione di equilibrio delle particelle costituenti il mezzo di trasmissione: lo studio dell’onda avviene generalmente per motivi di semplicità utilizzando un sistema di riferimento solidale con il mezzo stesso (ad esempio quando si parla di velocità di un’onda acustica è sottointeso velocità rispetto a un sistema di riferimento solidale con il mezzo di trasmissione).
Se il mezzo si muove rispetto a un osservatore, questi misurerà una velocità di fase dell’onda diversa da quella vista da un osservatore solidale al mezzo di trasmissione: in questo consiste il drift effect.
Ne deriva che il tempo di percorrenza da parte dell’onda dello spazio che separa un emettitore di onde meccaniche dal ricevitore delle stesse onde (si veda la figura 1.4 e l’equazione (1.3), dove d è la distanza fra trasmettitore e ricevitore, c è la velocità dell’onda nel fluido in condizioni di quiete, v è la velocità del fluido e α è l’angolo fra v e d) dipende anche dalla velocità del fluido tra di essi, dall’angolo fra la velocità e la retta ideale che congiunge trasmettitore e ricevitore oltre che dai soliti altri parametri fisici (temperatura, pressione, densità ecc.).
Per essere valida l’equazione (1.3), la velocità deve avere certe caratteristiche (ad esempio avere la stessa direzione in ogni punto): in tal caso la velocità che risulta dalla (1.3) è una media del modulo della velocità del fluido incontrato dall’onda nel suo cammino fra trasmettitore e ricevitore.
figura 1.4: il tempo di volo tra T e R dipende anche da V cos T R d t c v α → = + ⋅ (1.3)
Utilizzando il principio del drift effect (con trasduttori ultrasonici) sono stati realizzati con successo sistemi per le misure di flusso di materia sia gassosa che liquida in generale: flussometri in ambito idraulico [14], per gas domestico [15], per l’aria in ingresso a motori a combustione interna [15], ecc.
Il principio del drift effect sarà utilizzato in questa tesi per ricavare la misura della velocità rispetto al terreno di un oggetto in generale.
Nelle condizioni in cui tutte le particelle dell’aria sono ferme rispetto al terreno, la misura della velocità dell’aria rispetto all’oggetto fornisce la stessa informazione della misura della velocità dell’oggetto rispetto al terreno; la misura della velocità dell’aria si cercherà di ottenerla con un sistema basato sul principio del drift effect.
Dovendo essere il sistema oggetto di questa tesi di basso costo, si è scelto di utilizzare come trasduttori sistemi che lavorano in banda acustica (in sostanza altoparlanti e microfoni) per poter sfruttare i vantaggi derivanti dalla produzione
di massa di questi dispositivi (in sostanza bassissimo costo a fronte di potenza, efficienza e robustezza meccanica).
2 Principi fisici, specifiche e struttura del sistema
In questo capitolo, dopo un breve richiamo di acustica avente lo scopo di definire con precisione alcune grandezze che verranno poi utilizzate nel resto della discussione, viene illustrato in dettaglio il principio di misura.Vengono poi discusse le problematiche relative a una possibile realizzazione di uno strumento basato sul principio fisico in questione, e infine vengono fissate le specifiche tecniche che dovranno poi essere soddisfatte dall’apparecchiatura.
2.1 Richiami di acustica
Il suono è un’onda (ovvero una perturbazione di carattere oscillatorio) che si propaga in un mezzo elastico.
Il mezzo di propagazione qui considerato è l’aria, dove le perturbazioni che danno luogo alla presenza del fenomeno oscillatorio sopra detto sono provocate da sollecitazioni di pressione indotte da un corpo vibrante, corpo che costituisce la cosiddetta sorgente sonora.
In particolare detta sorgente sonora, oscillando rispetto a una posizione di equilibrio, trasmette il moto alle particelle del mezzo che si trovano a suo diretto contatto, le quali, a loro volta, trasmettono questo moto vibratorio a altre particelle adiacenti: in questo modo la perturbazione prodotta dalla sorgente si propaga nel mezzo a distanze sempre più grandi.
figura 2.1: esempio di sorgente vibratoria elementare (massa m oscillante)
Le grandezze per mezzo delle quali ci si serve per descrivere un fenomeno acustico (un’onda elastica in generale) sono la velocità di oscillazione u e la pressione acustica p, così definite:
velocità di oscillazione u: velocità di spostamento delle particelle del mezzo; pressione acustica p: perturbazione subita dalla pressione esistente nel mezzo a causa della presenza di un sistema di onde; è definita in (2.1), come differenza fra la pressione pt (ovvero la pressione esistente in presenza di fenomeno sonoro in un
punto a un certo istante) e la pressione statica p0 (ovvero la pressione che si
avrebbe nello stesso punto e a quel dato istante in assenza di suono).
0 t
p= p −p (2.1)
Il rapporto fra i fasori di p e di u è detto impedenza acustica specifica (2.2).
s
P Z
U
= (2.2)
Attraverso la soluzione delle equazioni di propagazione (2.3) (2.4) con le relative condizioni al contorno (cp e cv sono le capacita termiche rispettivamente a
pressione costante e a volume costante, ρ0 è la densità dell’aria in quiete) siamo in
grado di determinare la distribuzione di un sistema di onde acustiche in un volume generico, ovvero l’andamento di u e di p in un punto generico e in un istante
generico. 2 2 2 2 1 p p c t ∂ ∇ = ⋅ ∂ (2.3) 2 2 2 2 1 u u c t ∂ ∇ = ⋅ ∂ (2.4) con 2 0 0 P c γ ρ = ⋅ (2.5) p v c c γ = (2.6)
La soluzione generale dell’equazione di Laplace è una combinazione lineare di due funzioni arbitrarie, una dipendente da t [R x y z( , , )]
c − e l’altra da ( , , ) [R x y z ] t c
+ , dove rappresenta un punto generico dello spazio
cartesiano considerato.
( , , )
R x y z
Se ad esempio la dipendenza spaziale è limitata alla sola coordinata x, si ottiene la (2.7) come soluzione, dove le particolari funzioni Fp e Fr dipenderanno dalle
condizioni al contorno e rappresentano due onde propagatesi nel verso delle x positive (Fp) e delle x negative (Fr) rispettivamente.
( , ) p( x) r( x)
p x t F t F t
c c
= − + + (2.7)
Si può notare che la grandezza c, definita dalla relazione (2.5), rappresenta la velocità con cui l’onda di pressione si propaga nel mezzo.
Con l’ipotesi che l’aria sia un gas perfetto, attraverso l’uso dell’equazione di stato
p v⋅ = ⋅ , si può riscrivere la (2.5) come (2.8) (con M massa molecolare e R R T
costante dei gas).
RT c
M
γ
= ⋅ (2.8)
Sostituendo i valori numerici si ricava l’andamento di c in funzione della temperatura, equazione (2.9).
331.4 0.6
c= + ⋅t (2.9)
Particolari soluzione dell’equazione di Laplace (2.3) sono le onde piane e le onde sferiche, con, rispettivamente, fronti d’onda piani e fronti d’onda sferici.
Sotto l’ipotesi che la sorgente sia sollecitata da un moto armonico semplice di pulsazione ω, e che esista solo la componente progressiva, i due tipi di propagazione assumono la forma (2.10) (2.11) per le onde piane (in coordinate cartesiane) e (2.12) (2.13) per le onde sferiche (in coordinate sferiche), con
2 k c π ω λ = = .
(
)
(
)
m p=P sen k ct−x (2.10)(
)
(
)
(
(
0 m m P u U sen k ct x sen k ct x c ρ = − = −)
)
(2.11)(
(
1 m p P sen k ct r r = −)
)
(2.12)(
)
(
)
(
)
2 2 0 0 1 1 1 arcta per m m P u sen k ct r r c k r kr P sen k ct r r r c ρ λ ρ ⎛ ⎛ ⎞⎞ = + ⎜ − − ⎜ ⎟⎟ ⎝ ⎠ ⎝ − > n ⎠ (2.13)Considerando la sola componente progressiva, il rapporto fra p e u (ovvero l’impedenza specifica calcolata nel mezzo per la sola componente progressiva quando pressione e velocità sono in fase) è detto impedenza caratteristica del mezzo (per onde sferiche questo è vero in condizioni di campo lontano, ovvero per r >
λ
): per l’aria vale Zc = ρ0 ·c.Attraverso l’utilizzo delle analogie elettromeccaniche3 (tipicamente quella di Maxwell, dove alla velocità di vibrazione si fa corrispondere la corrente elettrica e alla forza vibromotrice si fa corrispondere la differenza di potenziale fra due nodi) si può introdurre l’impedenza meccanica (2.14), definita come il rapporto tra il fasore della forza meccanica F e il fasore della velocità di vibrazione u, dove Rm
rappresenta la resistenza meccanica, M è la massa, e Cm è la cedevolezza
meccanica (ad esempio nel sistema di figura 2.1 M è la massa in questione,
1
m
C k
= dove k è la costante elastica della molla e Rm tiene conto degli effetti della
forza di attrito). 1 ( m m m F Z R j M U ω ωC = = + − ) (2.14)
3Quando due sistemi fisici di natura diversa sono descritti da equazioni formalmente identiche si
L’utilizzo delle impedenze meccaniche risulta comodo nell’analisi di sistemi costituiti da parti solide, quando tutti i punti di una superficie facente parte di un corpo rigido vibrano tutti con la stessa velocità u, nonostante siano sottoposti a una pressione in generale diversa da punto a punto: in tal caso infatti l’uso dell’impedenza meccanica permette di considerare nell’analogia elettromeccanica le parti sottoposte a pressioni diverse come in serie fra loro (in quanto risulta per ognuno di essi definita la forza F e la velocità u: è il caso tipico delle membrane dei trasduttori elettroacustici, anche se in tal caso è necessario passare da modelli a costanti concentrate a modelli a costanti distribuite).
Quando si considerano oscillazioni in un mezzo fluido contenuto in cavità di piccole dimensione rispetto alla lunghezza d’onda, conviene riferirsi alla pressione acustica invece che alla forza vibromotrice: in tal caso risulta utile utilizzare l’impedenza acustica (2.15), definita come il rapporto tra la pressione acustica P e la portata acustica Ψ (Ψ = S·use la velocità di vibrazione u è la stessa per ogni punto della superficie S, dove S è un’area ortogonale alla superficie di propagazione), dove Ra è la resistenza acustica, Ma è la massa acustica o
inertanza, Ca è la cedevolezza acustica.
1 ( a a a a P Z R j M C ω ψ ω = = + − ) (2.15)
Per sistemi piccoli rispetto alla lunghezza d’onda (ad esempio nel caso di cavità di piccole dimensioni rispetto alla lunghezza d’onda, contenenti aria o, più in generale, il fluido di propagazione dell’onda), quando per punti diversi di una
superficie esistono valori diversi della velocità di vibrazione u, mentre la pressione è costante su tutta la detta superficie, è utile servirsi dell’impedenza acustica, in quanto la portata acustica totale è la somma delle portate delle zone (al limite punti) che differiscono per la velocità u.
2.2 Principio di misura
Il metodo di misura della velocità che si è adottato è basato sulla misura del tempo di volo di un’onda acustica da una sorgente (altoparlante) a un ricevitore (microfono) di posizione reciproca nota e immutabile nel tempo, posti a distanza d.
L’onda monocromatica emessa dal trasmettitore raggiungerà il ricevitore (considerato puntiforme per via della sua distanza dalla sorgente in rapporto alla lunghezza d’onda) dopo un tempo , dipendente sia dalla velocità di fase c dell’onda, oltre che da altri fattori.
T R
t →
La velocità di fase c (2.9) rappresenta infatti la velocità dell’onda rispetto a un sistema di riferimento solidale al fluido nel quale si propaga l’onda acustica. Se il fluido è immobile rispetto al trasmettitore e al ricevitore, allora la velocità c sarà anche la velocità rispetto al sistema trasmettitore-ricevitore, e pertanto la distanza d verrà coperta in un tempo pari a d/c. Se invece il fluido si muove rispetto al sistema trasmettitore-ricevitore con velocità v, allora la velocità dell’onda acustica rispetto al sistema trasmettitore-ricevitore non sarà più c, ma sarà legata anche alla velocità del fluido v e all’angolo formato dalla direzione di v
con il vettore congiungente il trasmettitore e il ricevitore.
figura 2.2: posizione trasmettitore, ricevitore e velocità del fluido
In particolare il tempo di volo è espresso dalla seguente (2.16) equazione:
cos T R d t c v α → = + ⋅ (2.16) dove: T R
t → = tempo di volo fra trasmettitore e ricevitore
d = distanza fra trasmettitore e ricevitore
c = velocità del suono in aria in assenza di perturbazione (aria ferma) v = velocità veicolo
cos
v⋅ α = componente della velocità lungo la retta congiungente trasmettitore e
ricevitore.
Misurando pertanto il tempo (come differenza fra l’istante di partenza e l’istante di arrivo dell’onda), si è in grado di risalire al valore della velocità v, utilizzando la relazione (2.16), dato che tutto il resto è noto
T R
t →
4.
4 Per quanto riguarda la velocità del suono c, dopo una taratura iniziale da fermo, sarà necessario
Per quanto riguarda la velocità v del fluido vengono fatte le seguenti ipotesi semplificative:
• la velocità di ogni parte del fluido viene ipotizzata essere la stessa e uguale in modulo a quella del veicolo, ovvero il fluido si muove in “blocco” rispetto a un sistema di riferimento solidale al veicolo, si esclude la possibilità di gradienti di velocità all’interno del fluido (se non in uno spessore trascurabile si veda a tal proposito il paragrafo 2.3);
• la velocità non ha componenti lungo z, ovvero appartiene a un piano parallelo al piano contenente il vettore congiungente il trasmettitore e il ricevitore;
• si suppone che la velocità sia costante durante il tempo che l’onda impiega per raggiungere il ricevitore dal trasmettitore.
L’ultima affermazione è giustificata per le distanze d considerate (qualche metro) e per le accelerazioni considerate, al massimo 10 m/s2 (valore corrispondente a una accelerazione difficilmente raggiungibile da un’auto di serie, anche se dotata di un motore potente e in condizioni di ottima aderenza con il terreno). Infatti dalla (2.17), che esprime la differenza fra la velocità al momento della partenza dell’onda dal trasmettitore (viniziale) e la velocità al momento dell’arrivo dell’onda
al ricevitore (vfinale), per a = 10 m/s2 e d = 2 m, si ottiene [m/s]
(l’accelerazione massima possibile è legata alla velocità di variazione massima del
0.0291
v
∆ =
iniziale a fermo avrà anche lo scopo di cercare di eliminare influenze di altro tipo (umidità dell’aria, eventuali ritardi introdotti dall’elettronica ecc.)
nostro segnale da misurare, ovvero determina la sua banda).
cos ( ) cos
con l'ipotesi cos cos finale iniziale T R media iniziale iniziale v v v t a d d a c v c v v d a c v c v α α a α α → ∆ = − = ⋅ = ⋅ ≤ + ⋅ + + ∆ ⋅ ≅ ⋅ >> ∆ + ⋅ ⋅ ⋅ (2.17)
Si noti che in ricezione non è necessario ricostruire la forma del segnale trasmesso, ma solo individuare con precisione l’istante di arrivo, pertanto il segnale ricevuto potrà essere distorto se questo faciliterà la rilevazione di detto istante di arrivo.
2.3 Cenni sulla fluidodinamica intorno alla vettura
In questo paragrafo si cercherà di giustificare l’ipotesi di velocità uniforme e uguale in modulo a quella del veicolo, e di descrivere in maniera molto semplificata il moto dell’aria attorno a un veicolo per avere un’idea approssimativa di come ciò avvenga e per utilizzarlo per gli scopi di questa trattazione.
In un moto di un fluido, la prima cosa da vedere è se il moto del fluido sia laminare o turbolento.
• Laminare: il fluido si muove a strati e ogni particella del fluido segue un cammino regolare e continuo; in ogni strato del fluido le particelle del fluido rimangono nello stesso ordine senza mescolarsi.
• Turbolento: il cammino della singola particella è un cammino irregolare; tuttavia è possibile descrivere il moto con un approccio di tipo statistico, o meglio, ragionando su valori medi.
Nel caso particolare di un fluido (in questo caso aria) che scorre su una superficie, le particelle del fluido vicino alla superficie sono influenzate da tale superficie, cioè risentono di forze di natura viscosa (attrito viscoso).
Quelle che sono esattamente a livello della superficie vi rimangono “attaccate”, ovvero hanno una velocità nulla rispetto alla superficie.
Le altre particelle, sopra quelle “attaccate” alla superficie, sono da queste rallentate sempre meno man mano che ci si allontana dalla superficie.
A livello microscopico questo fenomeno è ben descritto da sforzi di taglio (fra strati differenti di fluido) e dall’equazione di Newton (F dv
dx
µ
= ⋅ nel caso di una
dimensione, con µ viscosità del fluido).
A una certa distanza dalla superficie (che si vedrà poi di quantificare) il moto sarà evidentemente quello di fluido indisturbato, a causa del fatto che le forze di tipo viscoso che si originano sulla superficie si fanno sentire fino a una certa distanza dalla superficie stessa.
2.3.1 Strato limite idrodinamico
Si definisce strato limite idrodinamico “il fluido contenuto nella zona spaziale dove si hanno variazioni sostanziali di velocità”.
superficie alla quale il valore locale della velocità raggiunge il 99% del valore della velocità esterna v∞” (ovvero di quella del fluido indisturbato).
Pertanto l’introduzione dello strato limite permette di dividere grossolanamente la zona spaziale che circonda un corpo in generale, un corpo piano in questo caso, in due zone: la prima, sottile, che ricopre la superficie del corpo nella quale esistono e non sono trascurabili forze viscose, ed è presente un gradiente di velocità (da 0 a 99% di ); la seconda, esterna alla prima, dove le forze viscose sono trascurabili e il moto è analogo a quello che si avrebbe se il corpo perturbante non ci fosse.
v∞
E’ evidente che la forma del profilo di velocità nello strato limite e il suo spessore dipenderanno dalla caratteristiche fisiche del problema; un esempio è riportato in figura 2.3 dove è rappresentato, nel caso di una lastra piana investita da un flusso di aria con velocità di fluido indisturbata parallela alla piastra, l’andamento dello spessore dello strato limite in funzione della distanza dall’inizio della piastra stessa. In questo caso si cercherà di stabilire se il moto sia laminare o turbolento, o meglio, quali sono le variabili fisiche che informano del passaggio da uno all’altro, e in entrambi i casi si calcolerà lo spessore dello strato limite, determinante per vedere se il mezzo nel quale si propaga la perturbazione sonora (onda meccanica) può essere approssimato come un corpo omogeneo e fermo, per facilitare la soluzione delle equazioni dell’acustica fisica.
figura 2.3: andamento qualitativo strato limite per una lastra parallela alla corrente del fluido
2.3.2 Lastra piana parallela alla corrente del fluido (richiamo)
Per la quantificazione dello strato limite ci si riferisce al caso del moto di un fluido sopra una lastra piana (figura 2.4), situazione ben documentata in letteratura e ben descrivibile, anche se talvolta attraverso relazioni sperimentali.
In x = 0, y = 0 (bordo d’attacco) solo poche particelle (quelle a diretto contatto con la lastra) sono influenzate dalla lastra stessa, e lo strato limite è praticamente nullo.
Spostandoci lungo x si assiste a un ispessimento di tale strato limite (sempre comunque in condizioni di moto laminare).
figura 2.4: lastra piana parallela alla corrente del fluido
Ad una certa distanza dal bordo di attacco, chiamiamola xc, il moto diventa
turbolento.
Questa distanza xc si ricava attraverso il numero di Reynolds (2.18), ovvero
sperimentalmente si è trovato che il moto è laminare fino a un certo valore dal numero di Reynolds, dopo diviene turbolento.
Re v ρ x
µ
∞⋅ ⋅
= (2.18)
con:
v∞ = velocità del fluido indisturbato m
s ⎡ ⎤ ⎢ ⎥ ⎣ ⎦
ρ = densità del fluido kg3 m
⎡ ⎤
⎢ ⎥
⎣ ⎦
x = distanza dal bordo di attacco
[ ]
mµ = viscosità del fluido kg m s
⎡ ⎤
⎢ ⋅ ⎥
Con moto calmo, ovvero su una superficie regolare, perfettamente pianeggiante e priva di imperfezioni e sporgenze, il regime laminare sussiste fino a numeri di Reynolds Re 1 10= ⋅ 6 (sperimentale).
In moto disturbato, per esempio nel caso di superficie irregolare, o con presenza di imperfezioni o sporgenze, il moto può diventare turbolento anche per numero di Reynolds di Re 8 10= ⋅ 4.
In condizioni medie il moto su una piastra diviene turbolento a una distanza dal bordo xc tale che il numero di Reynolds è circa 5 10⋅ 5.
In condizioni ambientali (temperatura 25° C, pressione 105 Pa), dato che il moto è laminare fino a un numero di Reynolds pari a circa 105÷ ⋅5 105, si ricava x
c dalla
(2.19) (con 5), da cui la relazione (2.20) e il grafico di figura 2.5.
Recritico = ⋅5 10 Re Re c c c v x x v c ρ µ µ ρ ∞ ∞ ⋅ ⋅ ⋅ = → = ⋅ (2.19)
v∞ = velocità del fluido indisturbato m
s ⎡ ⎤ ⎢ ⎥ ⎣ ⎦
ρ = 1,14 densità del fluido kg3 m
⎡ ⎤
⎢ ⎥
⎣ ⎦
xc = distanza critica dal bordo di attacco, alla quale il moto diviene turbolento
[ ]
m µ = viscosità del fluido kgm s ⎡ ⎤ ⎢ ⋅ ⎥ ⎣ ⎦ 8.37 c x v∞ = (2.20)
figura 2.5: andamento di xc in funzione della velocità di fluido indisturbato
Si noti che la transizione non è immediata, ma c’è una zona di transizione, ovvero il passaggio da moto laminare a turbolento non avviene immediatamente a xc, ma
c’è una zona (piccola) nella quale si assiste a un passaggio graduale dall’uno all’altro.
Tuttavia consideriamo che la distanza xc discrimini le due zone di moto laminare e
di moto turbolento in maniera netta, in quanto l’obbiettivo non è avere una descrizione esatta del moto dell’aria, ma constatare che in entrambe le situazioni di moto laminare e di moto turbolento lo spessore dello strato limite si mantiene abbastanza piccolo da poter essere trascurato rispetto al volume totale, sede di propagazione dell’onda meccanica.
2.3.3 Moto del fluido (aria) fra il pianale dell’auto e la strada
L’insieme del fondo dell’auto e asfalto si può schematizzare come in figura 2.6
figura 2.6: schematizzazione fisica dell’insieme auto e strada
La presenza dell’asfalto fa sì che non si possano considerare i risultati dell’esperimento classico (figura 2.4) così come sono.
Si fa però l’ipotesi che a livello dell’asfalto l’aria sia ferma rispetto a esso, ovvero nel sistema di riferimento dell’autovettura sia equivalente a un moto di fluido indisturbato.
Questo dovrà essere verificato a posteriori, in base allo spessore dello strato limite che si troverà utilizzando questa ipotesi.
Si considera cioè l’esperimento equivalente a quello classico, ignorando la presenza dell’asfalto; si fanno i conti come se l’asfalto non ci fosse e si calcola lo spessore dello strato limite e tutto il resto.
Dopo di che si va a controllare a ritroso se i risultati ottenuti sono consistenti con l’ipotesi di partenza, ovvero se lo strato limite è effettivamente piccolo da poter considerare il moto del fluido a livello dell’asfalto come moto di fluido
indisturbato, ovvero come se la macchina non ci fosse.
Con il riferimento come in figura 2.7 l’ipotesi è v x y
(
, =d)
=v∞ (velocità delfluido indisturbato).
figura 2.7: riferimento cartesiano x-y per la velocità
• Caso di moto laminare
Nella zona di strato laminare (ovvero per x < xc) lo spessore dello strato limite è
dato dalla nota equazione (2.21)
5 5 Re( ) laminare x x x v δ δ µ ⋅ ⋅ = = ⋅ ∞ (2.21)
La (2.21) è stata ricavata per via analitica5, applicando le leggi della meccanica classica di Newton al fluido, e tenendo presente la relazione fra viscosità velocità e sforzi di taglio. Sostituendo i valori in condizioni ambiente di µ e ρ si ottiene la (2.22).
figura 2.8: spessore strato limite in funzione della velocità in zona di moto laminare (colori diversi indicano diverse distanze dal bordo di attacco: giallo x = 10 cm; viola x = 20 cm; celeste x = 50 cm; rosso x = 1 m; verde x = 1,2 m; blu x = 1,5 m; nero x = 2 m)
tabella 2.1: alcuni valori interessanti (v∞ in m/s e spessore δ in m)
v∞ δx=0.1 δx=0.5 δx=1 1 0,0065 0,0144 0,0204 3 0,0037 0,0083 0,0118 5 0,0029 0,0065 0,0091 10 0,0020 0,0046 turbolento 20 0,0014 turbolento turbolento 40 0,0010 turbolento turbolento
2 2.04 10 laminare x v δ − ∞ = ⋅ ⋅ (2.22)
Con la condizione di essere un moto laminare (2.23) inserita come limitazione delle rispettive curve, si ottiene il grafico in figura 2.9.
8.37
x v⋅ ∞ < (2.23)
figura 2.9: spessore strato limite in funzione della velocità in zona di moto laminare (colori diversi indicano diverse distanze dal bordo di attacco: giallo x = 10 cm; viola x = 20 cm; celeste x = 50 cm; rosso x = 1 m; verde x = 1,2 m; blu x = 1,5 m; nero x = 2 m) con la condizione (2.23) sul limite della zona di moto laminare
• Caso di moto turbolento
In caso di moto turbolento (ovvero per x > xc) lo spessore dello strato limite è
1 4 5 5 0.376 ( ) Turbolento x v µ δ ρ ∞ = ⋅ ⋅ ⋅ (2.24) 6
figura 2.10: spessore strato limite in funzione della velocità in zona di moto turbolento(colori diversi indicano diverse distanze dal bordo di attacco: giallo x = 10 cm; viola x = 20 cm; celeste x = 50 cm; rosso x = 1 m; verde x = 1,2 m; blu x = 1,5 m; nero x = 2 m)
tabella 2.2: alcuni valori interessanti (v∞ in m/s e spessore δ in m)
v∞ δx=0.1 δx=0.5 δx=1
10 laminare laminare 0,0263
20 laminare 0,0132 0,0229
40 laminare 0,0115 0,0199
Con la condizione di essere in moto turbolento (equazione (2.25)), inserita come limitazione delle rispettive curve, si ottiene il grafico in figura 2.11.
8.37
x v⋅ ∞ > (2.25)
figura 2.11: spessore strato limite in funzione della velocità in zona di moto turbolento (colori diversi indicano diverse distanze dal bordo di attacco: giallo x = 10 cm; viola x = 20 cm; celeste x = 50 cm; rosso x = 1 m; verde x = 1,2 m; blu x = 1,5 m; nero x = 2 m) con la condizione (2.25) sul limite della zona di moto laminare
Mettendo insieme la (2.21) in situazione di moto laminare (x < xc) e la (2.24) in
situazione di moto turbolento (x > xc) e riportando tutto in funzione di v per
diverse distanze dal bordo di attacco (x = 0, y = 0), si ottengono gli andamenti riportati in figura 2.12.
Si noti che la mancanza di continuità delle curve deriva dall’aver trascurato la zona di transizione a ridosso di xc e aver considerato che il moto da laminare
equazione (2.24), relazione sperimentale valida in condizioni di moto turbolento (in zona di transizione lo spessore è più piccolo di quello ottenuto dalla (2.24)). Lo spessore dello strato limite giustifica poi l’ipotesi fatta in partenza di similitudine fra il caso classico e quello dell’automobile sull’asfalto.
figura 2.12: spessore strato limite in funzione della velocità per diverse distanze dal bordo di attacco (colori diversi indicano diverse distanze dal bordo di attacco: giallo x = 10 cm; viola x = 20 cm; celeste
x = 50 cm; rosso x = 1 m; verde x = 1,2 m; blu x = 1,5 m; nero x = 2 m)
Se ne conclude che, essendo lo strato limite di modesto spessore rispetto al resto del volume (per le velocità di interesse e per le distanze dal bordo di attacco di interesse, inferiori a qualche metro, 1÷2 m) sia nel caso di moto laminare che turbolento, l’influenza sulla velocità sarà analoga (infatti la velocità che risulta è la media della velocità incontrata dall’onda nel suo percorso) e, comunque, si cercherà di far sì che la sorgente e il ricevitore si trovino nella zona di moto del
fluido indisturbato.
2.4 Limiti fisici del metodo di misura usato
Come si è visto nei paragrafi precedenti, la misura del tempo di volo permette di ricavare la velocità del fluido (aria) nel quale si propaga l’onda meccanica.
T R
t →
Tuttavia si deve considerare che tale relazione e le sue conseguenze sono state ricavate sotto ipotesi semplificative, ovvero sotto approssimazioni fisiche che a rigore non sono rispettate; ciò, anche se è necessario per poter dare una descrizione analitica tutto sommato semplice al problema, introduce scostamenti della misura rispetto al valore reale della grandezza in esame.
In particolare il fluido non si muove in blocco, ma esisteranno gradienti di velocità al suo interno (la cui influenza è stata analizzata nel paragrafo 2.3).
Inoltre si è ipotizzato che il veicolo incontri un fluido indisturbato, ovvero che, nel sistema di riferimento dell’autovettura, il moto del fluido sia un moto di fluido indisturbato: turbamenti a tale moto, provocato ad esempio da mezzi che precedono il veicolo in questione, possono compromettere la misura.
La temperatura e la densità del fluido non è detto siano uniformi nello spazio: questo produce differenze di impedenza acustica fra zone diverse e quindi incurvamenti della traiettoria percorsa dall’onda acustica, che pertanto percorrerà un percorso maggiore rispetto alla trattoria geometrica ideale.
ricezione corretta del segnale trasmesso: per limitare questo inconveniente è opportuno evitare di esporre troppo la superficie attiva del microfono al vento, anche per cercare di diminuire la presenza del rumore acustico in ricezione (per la riduzione del rumore si è anche inserito un filtro passa banda in ricezione, centrato sulla frequenza fondamentale di trasmissione; si veda il paragrafo 4.3 per maggiori dettagli su questo punto).
L’azione del vento modifica la misura della velocità (ovvero quello che misuriamo è la somma vettoriale della velocità del veicolo e di quella del vento). Per risolvere questo problema si possono installare più ricevitori (almeno due) per avere un’indicazione vettoriale della velocità dell’aria rispetto alla macchina (somma di quella dovuta allo spostamento del veicolo e di quella del vento rispetto al veicolo) e da quella ricavare la proiezione lungo l’asse longitudinale del veicolo (nell’ipotesi ragionevole di velocità parallela al piano contenente le ruote). Ad esempio, con la configurazione riportata in figura 2.13, con le trattorie ortogonali per semplicità di trattazione7, si riesce a misurare v1 e v2 che sono
legate al vettore velocità dalle equazioni riportate nella (2.26).
7un risultato simile si ottiene anche se le direzioni delle rette congiungenti trasmettitore e ricevitore
non sono ortogonali; in tal caso cambierebbero semplicemente le relazioni trigonometriche che legano le varie componenti della velocità
figura 2.13: configurazione a due trasmettitori per conoscere il vettore velocità completo $ $ 1 2 1 2 cos sin sin cos x y x y v v x v y v v v v v v α α α α = ⋅ + ⋅ = + = + r (2.26)
L’onda trasmessa non sarà perfettamente monocromatica: a causa della necessità di evitare interferenze di cammino multiplo, il treno di impulsi avrà una durata finita.
L’azione di alcuni di questi fattori potrà essere limitata con opportuni accorgimenti, o quantomeno, ove possibile, si cercherà di dare una stima dell’errore che introducono.
In particolare si trascureranno totalmente i gradienti di temperatura del fluido e gli scostamenti dovuti alla presenza di vapore acqueo nell’aria (questi ultimi hanno influenza soprattutto nell’attenuazione dell’onda).
2.5 Struttura in generale dell’apparecchiatura e sua
installazione
Il sistema è costituito da due sottosistemi distinti (board) collegati da una connessione, più una eventuale terza scheda che ospita il sistema di
visualizzazione: su una scheda è presente sia il sistema di trasmissione, costituito da un altoparlante e dal suo stadio di potenza, sia il sistema di elaborazione; sull’altra è presente il ricevitore (microfono) con il sistema di ricezione e amplificazione.
figura 2.14: schema a blocchi della board T (trasmissione e logica di controllo)
figura 2.15: schema a blocchi della board R (ricezione)
Il collegamento fra le due board, che permette alla parte di ricezione di avvisare la parte di elaborazione che il segnale è stato ricevuto, avviene tramite un opportuno cablaggio.
contemporaneamente dà il via al conteggio, utilizzando un contatore con periodo di clock Tclk; dopodiché riceve dalla board dove è installato il ricevitore la
segnalazione che l’impulso è arrivato e calcola la velocità attraverso la relazione
(2.27), dove indica il tempo che l’onda sonora ha impiegato per
raggiungere il ricevitore (n è il contenuto del contatore al momento dell’arrivo alla logica di controllo dell’informazione che il segnale è stato ricevuto).
T R clk t → = ⋅n T cos T R T R d c t v t α →→ − ⋅ = ⋅ (2.27)
Verrà poi effettuata una visualizzazione del risultato e una eventuale memorizzazione dei valori assunti dalla velocità nel tempo.
Si accenna qui al fatto che, per fornire il dato sulla velocità, la logica di controllo effettua una media utilizzando un numero di campioni sufficiente per aver una misura attendibile, in particolare per ridurre gli effetti dovuti al moto turbolento. Per maggiori dettagli su questo argomento si veda il capitolo 5.
Una possibile installazione dell’apparecchio è sotto al pianale dell’autovettura nella parte anteriore (figura 2.16) tenendo in considerazione le osservazioni fatte nel paragrafo 2.3 sul moto dell’aria in quel punto.
figura 2.16: possibile installazione del trasmettitore e del ricevitore
2.6 Accorgimenti realizzativi
In base alla scelta effettuata sulla disposizione del trasmettitore e del ricevitore ne conseguono degli accorgimenti da adottare nella scelta di alcune caratteristiche di funzionamento del sistema in questione.
In primo luogo il problema dei cammini multipli dell’onda che possono portare a interferenza distruttiva: infatti l’altoparlante è in generale una sorgente più o meno direttiva e pertanto una parte delle onde emesse può andare a colpire il suolo e da questi una parte può venire riflessa e raggiungere il ricevitore (figura 2.17).
In particolare, la componente non facente parte del percorso diretto che per prima arriva al ricevitore (ed è anche quella a potenza maggiore dato che a frequenze acustiche la componete di scattering è bassa e quindi la maggior parte dell’onda che colpisce l’asfalto viene da questo riflessa come da uno specchio acustico) è quella evidenziata in figura 2.17.
La distanza d’ percorsa dall’onda nel tragitto riflesso è data dalla (2.28) 2 2 ' 2 2 d d = ⋅ ⎛ ⎞⎜ ⎟ +h ⎝ ⎠ (2.28)
Per evitare di avere interferenza si utilizza una durata dell’impulso in trasmissione tale che quando l’onda che ha percorso il cammino riflesso arriva a Rx, l’onda che
ha percorso il cammino diretto sia già attenuata in Rx: questo ha anche lo
svantaggio però di dover utilizzare in ricezione un segnale a energia più piccola rispetto al caso di durata più lunga.
figura 2.17: possibile cammino multiplo fra trasmettitore e ricevitore
La durata dell’impulso τ si ricava dalla differenza di cammino fra l’onda diretta e quella riflessa diviso per la velocità di fase dell’onda
2 2 2 2 ' d h d d d c c τ ⎛ ⎞ ⋅ ⎜ ⎟ + − − ⎝ ⎠ = = (2.29)
Con i valori in questione (h = 20 cm e d = 1 m) si ricava τ = 226 µs, compatibile con un numero di periodi ragionevoli a frequenze acustiche (a 20 kHz, che
corrispondono a un periodo di 50 µs, si possono utilizzare quattro periodi del segnale di pilotaggio).
Il problema poteva anche essere affrontato prendendo un altoparlante che avesse una direttività molto stretta: tuttavia si è scelto di fare un treno di impulsi di durata limitata cosicché, quando viene ricevuto il segnale riflesso, quello diretto è già arrivato e smorzato.
2.7 Specifiche tecniche per la fase realizzativa
Quando si vuol realizzare un sistema di misura di un segnale in generale, è necessario conoscere le caratteristiche che il segnale possiede, ad esempio la dinamica, la banda ecc., e stabilire le caratteristiche di risoluzione e accuratezza che si vogliono ottenere dal sistema adottato per effettuarne la misura.
In questo paragrafo si riportano pertanto le specifiche per il rispetto delle quali il sistema è stato progettato.
2.7.1 Specifiche sulla dinamica
Per quanto riguarda la dinamica della velocità, essa è limitata dal principio di misura adottato, ovvero, dovendo essere inferiore a quella del suono di circa un fattore 10 altrimenti non sarebbero più valide la approssimazioni via via introdotte, si può ottenere al massimo una dinamica da 0 a 40-50 m/s.
2.7.2 Specifiche sul periodo di campionamento
istanti t = k·Tc (con k = 0,1,2…, dove Tc rappresenta l’intervallo temporale che
separa l’invio di un tono dal successivo), pertanto per avere una misura senza perdita di informazione è necessario rispettare il teorema di Nyquist relativamente alla banda B del segnale: tenendo conto del fatto che la durata della misura di un campione è, come minimo, data dal tempo di volo8 (al massimo d/(c-vmaxcosα) nel
caso di installazione con α > π/2 e velocità massima) si ha la condizione (2.30) su
Tc. max 1 cos c 2 d T c v− α < ≤ B (2.30)
La stima dello spettro del segnale (almeno a livello statistico in termini di densità spettrale di potenza) è necessaria per avere un’indicazione sulla banda B e quindi, in definitiva, per scegliere la durata del periodo di campionamento: a tal proposito si può utilizzare l’informazione relativa alla massima variazione nel tempo della velocità (legata all’accelerazione massima fisicamente possibile) per stimare un limite frequenziale superiore della densità spettrale di potenza.
Si noti però che poter ricostruire senza perdita di informazione la velocità è utile specialmente in determinati contesti (ad esempio per il funzionamento dei sistemi elettronici di antibloccaggio delle ruote o di controllo elettronico della stabilità,
8 La possibilità di inviare l’impulso successivo prima che il precedente sia stato ricevuto si è
esclusa a causa dei possibili problemi di interferenza. Sono inoltre esclusi eventuali tempi necessari al sistema per inviare un nuovo tono dopo che il precedente è stato ricevuto dalla parte di ricezione.
per effettuare test sul veicolo ecc.).
Per una misura del valore istantaneo, adatta a essere visualizzata per l’osservazione da parte di un essere umano, aggiornamenti a un tasso superiore alla capacità di percezione sono pertanto inutili, o addirittura fastidiosi (ad esempio un display le cui cifre cambiano troppo velocemente diventa illeggibile). Pertanto, per lo scopo prefisso in questo lavoro, un tasso di aggiornamento della misura di qualche secondo (da uno a tre) è più che sufficiente (ci disinteressiamo di misurare quello che avviene alla velocità nell’intervallo fra un campione e l’altro anche se questo comporta perdita di informazione).
2.7.3 Specifiche sulla risoluzione
Passando alla specifica sulla risoluzione, essa influenza direttamente la scelta del periodo di clock del contatore: infatti dall’espressione analitica del tempo di volo, che si è visto essere espresso dall’equazione (2.31), si nota il legame fra esso e la velocità: quantificando il legame fra periodo di clock del contatore e risoluzione sulla misura della velocità, si può scegliere un contatore con un clock idoneo a ottenere la risoluzione sulla velocità pari a quella desiderata di 0,1 m/s.
cos T R d t c v α → = + ⋅ (2.31)
Dalla (2.31) ricaviamo la velocità v in funzione delle altre grandezze.
cos T R T R d c t v t α →→ − ⋅ = ⋅ (2.32)
nell’equazione (2.33), uno, tT R( )v 0 d
c
=
→ = , costante (almeno per la velocità, per la
temperatura si farà una taratura a fermo, e anche se tale taratura risente della risoluzione, si ipotizzi per ora tale tempo come fisso e noto) e l’altro, , variabile con la velocità del veicolo
( )v T R t → ∆ 9. ( )v 0 ( )v T R T R T R t → =t → = −∆t → (2.33)
che sostituito nella (2.32) fornisce la (2.34)
( ) ( ) 0 0 ( ( ) ) cos ( ) ( ) cos cos v v T R T R T R v v v T R T R T R T R T R d c t t v t d c t c t c t t t α α α = → → → = → → → → − ⋅ − ∆ = = ⋅ − ⋅ + ⋅ ∆ ⋅ ∆ = = ⋅ ⋅ → (2.34) in quanto che d = ⋅c tT→R( )v=0 .
• Legame fra risoluzione e clock: metodo approssimato
La (2.34) può essere riscritta utilizzando la relazione (2.35), grazie alla quale v diviene quella nell’equazione (2.36).
( )
(
)
0 ( ) cos cos 1 1 cos cos v T R T R v T R T R T R d d t t t c c v d t t c v c v c c v α α α α = → → → → → − ∆ = − = + ⋅ + ⋅ ⎛ ⎞ =⎜ − ⎟⋅ + ⋅ + ⋅ ⎝ ⎠ = (2.35)9 (N.B.: ( ) è positivo se la velocità e concorde con il riferimento in
v T R
t →
(
)
1 1 cos cos cos c c c c v v v α α α ⎛ ⎞ ⋅⎜ − ⎟⋅ + ⋅ + ⋅ ⎝ ⎠ = (2.36)Per basse velocità rispetto a quella del suono (quali sono quelle che qui interessano, fino a 40-50 m/s) e per angoli α intorno a 30°, si può ragionevolmente utilizzare, nel secondo fattore della (2.35), l’approssimazione (2.37).
(
c v+ ⋅cosα)
≈ (2.37) cCon l’approssimazione (2.37) si ottiene un errore relativo dato dalla (2.38), il cui andamento in funzione di v è riportato in figura 2.18 (con α = 30°).
cos( ) cos( ) cos( ) cos( ) c v c v e c v c v α α α α + ⋅ − ⋅ = = + ⋅ + ⋅ (2.38)
Con tali considerazioni la (2.35) diviene la (2.39) e la (2.34) diviene la (2.40) ( )0 ( ) 1 1 cos ( ) cos v T R v T R v T R T R d d t c c v t c d t c c v t c α α → → = → → ⎛ − ⎞ ⎜ ⎟ ∆ =⎛ − ⎞⋅ =⎝ + ⋅ ⎠ =∆ ⎜ + ⋅ ⎟ ⎝ ⎠ (2.39) ( ) ( 0) 2 0 ( ) ( ) cos cos T R d t v v T R v T R c v T R c t c t v t d α α → = = → → = → ⋅∆ ⋅∆ = ⎯⎯⎯⎯⎯→ = ⋅ v ⋅ → (2.40) Per ricavare la risoluzione considero la differenza fra due velocità ottenute
attraverso la misura di due tempi di volo che differiscono per un periodo di clock del contatore, diciamo tT R( )n = ⋅n Tc e tT→R(n+1) =(n+ ⋅1) Tc
n T⋅ T . ( ) ( )0 ( ) ( )0 ( )v T R v T R T R v c T R n n t → t → = t → t → = ∆ = − = − ( 1) ( )0 ( 1) ( )0 ( )v T R v T R T R v ( 1) c T R n n t → + t → = t → + t → = n ∆ = − = − + ⋅
( )
2 ( ( ) ( )) cos v T R n c t v n d α → ⋅ ∆ = ⋅(
)
2 ( ( ) ( 1)) 1 cos v T R n c t v n d α → + ⋅ ∆ + = ⋅( ) (
)
2 ( ( ) ( ) ( ) ( 1)) 2 1 cos cos v T R n v T R n c c t t c T v n v n d d α → → + ⋅ ∆ − ∆ ⋅ − + = = α ⋅ ⋅ (2.41)con i valori seguenti (2.42)
345 1 3 30 cos 2 m c s d m α α = = = ° → = (2.42) si ottiene la relazione (2.43)
( ) (
)
( ) (
)
5 5 1 1.374 10 1 1.374 10 c c v n v n T v n v n T − + = ⋅ ⋅ − + = ⋅ (2.43)Per ottenere una risoluzione di 0,1 m/s, è necessario un periodo di clock di almeno
Tclk = 727,8 ns pari a una frequenza di clock di 1,374 MHz
Riportando la (2.41) in un grafico in funzione di Tclk si ottiene l’andamento in
figura 2.19
figura 2.19: andamento risoluzione tachimetro in funzione della frequenza di clock del contatore
Utilizzando invece direttamente la relazione (2.32), con successivi passaggi si giunge all’espressione (2.45) cos T R T R d c t v t α →→ − ⋅ = ⋅ (2.44)
( )
cos c c d c n T v n n T α − ⋅ ⋅ = ⋅ ⋅(
1)
(
(
1)
)
cos 1 c c d c n T v n n T α − ⋅ + ⋅ + = ⋅ + ⋅( ) (
)
(
(
)
)
2 1 1cos cos 1 cos ( )
c c c c c d c n T d c n T d v n v n n T n T T n n α α α − ⋅ + ⋅ − ⋅ ⋅ − + = − = ⋅ ⋅ ⋅ + ⋅ ⋅ ⋅ + 2 (2.45) dove n rappresenta il numero che è nel contatore una volta che il ricevitore ha “deciso” che l’impulso è arrivato.
Le grandezze n e Tclk sono collegate, nel senso che se diminuisco Tclk, n aumenta
(compatibilmente con la dimensione del contatore) e viceversa, non sono cioè due variabili che possono assumere un valore l’una indipendentemente dall’altra. Con frequenze del contatore dal megahertz in su, n diviene sufficientemente grande da poter scrivere 2
n + ≈n n (infatti, con d = 1 m, = 125 ns, n varia da
circa 23000 per v = 0, a circa 20000 per v = 50 m/s).
C T
( ) (
1)
cos 2 c d v n v n T n α − + ≈ ⋅ ⋅ (2.46)Date le basse velocità rispetto a quella del suono, utilizzando ancora l’approssimazione (2.37) si ottiene la (2.47)
( ) (
)
2 1 1 1 cos cos c c c c T d d n v n v n T c v α T c α d ⋅ = ⋅ ≈ ⋅ → − + ≈ + ⋅ ⋅ (2.47)che coincide con quanto trovato prima (2.41)
• Legame fra risoluzione e clock: metodo esatto
(2.48) dove la risoluzione, dipendente da v, è riportata in un grafico (figura 2.20) in funzione di v (con i valori (2.42) e Tclk = 125 ns).
( ) (
)
2 2 1 cos ( ) 1 cos ( ( ) ) cos cos c c d v n v n T n n d d d T c v c v α α α α − + = = ⋅ ⋅ + = ⋅ ⋅ + + ⋅ + ⋅ (2.48)figura 2.20: andamento risoluzione in funzione della velocità con il metodo esatto in funzione della velocità (al variare della frequenza di clock del contatore)
In definitiva la risoluzione richiesta può essere soddisfatta da un contatore funzionante a qualche megahertz e senza la necessità di adottare tecniche di media per ottenere incrementi di risoluzione.
Poiché il sistema non necessita di particolare potenza di calcolo e di frequenza di clock elevata, per la logica di controllo si è ritenuto sufficiente utilizzare un