Conclusioni
Conclusioni
In questo lavoro di tesi sono stati realizzati ed analizzati modelli MBS di un motore completo di trasmissione a variazione continua relativo ad una moto da 850cc, in fase di sviluppo in Piaggio s.p.a..
Il sistema motore accoppiato e non, è stato realizzato nelle tre configurazioni di maggior interesse, ciascuna caratterizzata da un precarico iniziale della cinghia e da un determinato regime di rotazione del motore:
-rapporto corto, coppia massima, 6000giri/min; -rapporto lungo, potenza massima, 7250giri/min; -rapporto lungo, fuorigiri, 8500giri/min.
L’albero del motoscooter in oggetto, viene realizzato forgiando separatamente perni di biella e bracci di manovella. Per tale ragione per il manovellismo si sono costruiti modelli dell’albero motore considerando spinotto di biella, albero lato trasmissione ed albero lato volano, come tre corpi distinti. Le tre parti sono state considerate rigide nel modello più semplice, mentre nel modello più raffinato l’albero è costituito di corpi flessibili, mantenendo rigido il solo spinotto di biella.
Di seguito si riportano alcune considerazioni dedotte dai risultati delle simulazioni effettuate sui modelli:
1) l’albero flessibile relativamente ai regimi di rotazione analizzati, produce nel manovellismo perdite di lavoro crescenti con il regime di rotazione dell’albero, ma sempre al di sotto dell’8.11%. Più rilevante è invece l’aumento del grado di irregolarità del moto che tocca il 285% con motore fuorigiri, ciò è dovuto all’avvicinamento alla prima velocità critica dell’albero, che comunque risulta molto lontana.
2) L’azione smorzante della cinghia del CVT sul moto dell’albero, ne causa un miglioramento del grado di irregolarità superiore al 9% ed uno smorzamento sia dei picchi che delle valli dell’andamento della coppia motrice che ne innalza il valore medio, ma ne riduce il valore massimo disponibile alla puleggia motrice.
3) Le perdite di coppia resistente alla puleggia condotta, attribuibili alla presenza del CVT, crescono con l’introduzione dell’albero flessibile, infatti i numerosi picchi nell’andamento del momento motore, sono smorzati dalla cinghia, causando ulteriori perdite di rendimento della trasmissione.
Conclusioni
4) Le sollecitazioni della biella, risentono prevalentemente delle forza inerziali, ne consegue che il loro valore cresca con l’aumentare del regime di rotazione del motore. I carichi risentono solo marginalmente della flessibilità dell’albero, toccando scostamenti percentuali del 6.96% solo ad 8500giri/min; ne consegue che per la rilevazioni di tali carichi, e di quelli ad esso correlati, come le forze normali agenti sul cilindro, sia sufficiente l’uso di un modello rigido del solo manovellismo.
5) Per i carichi agenti sui perni di banco si è rilevata la necessità dell’uso di modelli anche se non necessariamente flessibili, ma comunque con un numero superiore di elementi rigidi ed uno schema di vincoli riproducente le reali condizioni di vincolo dell’albero. Sempre sui perni, si è rilevata l’influenza delle forze dei gas nei cilindri ed in prevalenza del cilindro più vicino, mentre risulta poco influente la presenza del CVT.
Può essere interessante sapere che il perno più sollecitato, nonostante le forze dei gas del cilindro ad esso più vicino siano inferiori, si è rivelato essere quello del lato volano, su cui appunto grava il peso del volano.
6) Per la rilevazione dei carichi sulle connessioni tra spinotto di biella e bracci di manovella, si è constatata l’affidabilità del modello rigido anche più semplice, con tre corpi rigidi a rappresentare l’albero, in quanto il modello flessibile fornisce variazioni percentuali massime del 5.5% sui picchi, e per quanto riguarda i valori medi risulta meno cautelativo. I carichi risentono molto della velocità di rotazione dell’albero, ma come i perni di banco risentono anche delle pressioni dei gas, e prevalentemente di quelle del cilindro più vicino.
7) L’incastro di connessione del volano va studiato con modello flessibile, difatti le sollecitazioni più gravose si hanno quando deve ostacolare, nel suo ruolo di stabilizzatore di moto, le repentine oscillazioni dell’albero.
8) Per quanto riguarda la gola di scarico sul lato trasmissione, le sollecitazioni vanno rilevate su di un modello ad albero flessibile, con albero sconnesso nella sezione della gola stessa, anche se il modello rigido consente di rilevare comunque valori accettabili del taglio e del momento torcente.
9) Le tensioni della cinghia presentano in ingresso alle pulegge picchi di tensione, che in condizioni di rapporto corto si manifestano anche in uscita dalla puleggia motrice. Tali tensioni nascono come conseguenza del momento impulsivo derivante dalla repentina rotazione del segmento di cinghia, ma a contribuire a tale incremento di tensione è anche la tensione derivante dall’incuneamento del segmento di cinghia nella fase di ingaggio nella puleggia. Il valore dei picchi è influenzato dal valore del fattore di smorzamento D (Damping Rate) da cui dipende la correlazione tra rigidezze e coefficienti di smorzamento. Data
Conclusioni
l’influenza di tale parametro sul rendimento della trasmissione, un valore sperimentale di tale rendimento consentirebbe una scelta più adatta del valore di D relativamente alla cinghia in studio. In mancanza di tale dato si è utilizzato nelle simulazioni per l’analisi delle reciproche influenze dei sottosistemi, un valore di D per cui si ha un assestamento delle variazioni percentuali indotte dalla variazione dello stesso parametro, sui picchi di tensione. L’incertezza di tale valore costringe comunque a limitare lo studio ad una analisi comparativa dei rendimenti.
10) Il valore medio delle tensioni sui rami si discosta sensibilmente dal modello teorico puro, cioè che utilizzi raggi di avvolgimento e velocità della cinghia teorici. Il metodo teorico per il calcolo delle tensioni, consente di validare il modello, quando si sfruttino i dati ottenibili dal modello stesso, riguardanti velocità effettiva e raggio effettivo di avvolgimento della cinghia, in modo da considerare le reali condizioni di esercizio della cinghia. Per condizioni di lavoro meno gravose che non quelle di rapporto corto con coppia massima, gli scostamenti percentuali dei modelli dal relativo modello teorico risultano al massimo del 5%.Gli elevati slittamenti della cinghia nella configurazione di rapporto corto con coppia massima sono la causa primaria degli elevati scostamenti percentuali tra il modello teorico ed il modello multibody.
11) La pressione laterale sui segmenti di cinghia presenta picchi in ingresso ed in uscita: i picchi in ingresso sono relativi alla fase di ingaggio, e dipende dalla tensione al momento dell’”impatto” del segmento nella gola della puleggia; i picchi in uscita sono dovuti al disingaggio. Nel disingaggio il segmento tende ad essere trascinato dall’attrito nella gola della puleggia oltre il punto geometrico d’uscita, quindi, per fuoriuscire, deve ruotare comprimendo la sua parte superiore nella gola della puleggia da qui il picco di pressione in uscita.
12) L’andamento della tensione tangenziale d’attrito è come ovvio proporzionale alla pressione laterale agente sul segmento, ma su di essa ha influenza anche la velocità d’ingresso della cinghia nelle pulegge.
13) La dinamica del manovellismo ad albero rigido causa oscillazioni nella velocità di rotazione e ciò provoca effetti prevalentemente sulle forze laterali le cui variazioni sono sempre intorno al 5%. In un solo caso arrivano al’ 11%, nel valore medio della tensione laterale agente sulla puleggia motrice nella configurazione di rapporto lungo ad 8500giri/min. Le tensioni longitudinali della cinghia raggiungono scostamenti percentuali del 4% solo con rapporti lunghi.
14) Nel modello accoppiato con il manovellismo ad albero flessibile a causa delle elevate oscillazioni della velocità alla puleggia motrice, le tensioni del ramo teso hanno oscillazioni
Conclusioni
attorno al valore medio che toccano il -7.6% ed il +8.2%, e le penetrazioni radiali dei segmenti nelle gole subiscono oscillazioni che si riflettono sugli andamenti delle forze laterali. 15) Il rendimento della trasmissione scende con l’introduzione dell’albero motore flessibile, a
causa sia delle elevate oscillazioni che la cinghia è costretta a smorzare, ma anche a causa dei continui cambiamenti di velocità che generano maggiori slittamenti e quindi perdite di coppia. In conclusione il modello di CVT è in grado di computare il rendimento totale dell’intera trasmissione, ed eventualmente di fornire i valori separati delle perdite di coppia e velocità. Le perdite totali rilevate dal modello includono le tre principali fonti di perdita, che sono perdita per scorrimento, per ingaggio e disingaggio della cinghia nelle pulegge, e soprattutto perdite per isteresi. Il modello è in grado di computare le perdite per isteresi dovute a flessione, a trazione e a compressione laterale della cinghia, considerando un suo ciclo di deformazione completo, includendo anche le vibrazioni della stessa. Occorre però ricordare che nella realtà le perdite per isteresi sono da imputarsi all’attrito interno (rinforzo, gomma, rivestimento), e si verificano quando la cinghia si avvolge attorno alla puleggia (perdite per flessione), quando si allunga e accorcia a causa della potenza trasmessa (perdite sotto carico), e quando è compressa nell’arco di contatto (perdite di compressione).
Dalla simulazione del modello completo si mettono in risalto gli effetti della dinamica del manovellismo sulle sollecitazioni della cinghia, e sulla velocità di rotazione delle pulegge motrice e condotta, e l’effetto smorzante della cinghia sulle oscillazioni dell’albero a rigidezza distribuita e quindi sui carichi strutturali del motore.
Per quanto concerne i tempi di calcolo relativi ad un PC con processore da 1.8GHz di frequenza e memoria RAM da 512MB,sia ha che:
-per la taratura della cinghia, ogni singola analisi dinamica di equilibrio richiede circa 40sec; -la simulazione del CVT richiede circa 90sec;
-la simulazione del manovellismo ad albero rigido richiede circa 10sec; -la simulazione del manovellismo ad albero flessibile richiede circa 15min;
-la simulazione del manovellismo ad albero rigido accoppiato al CVT richiede circa 4min; -la simulazione del manovellismo ad albero flessibile accoppiato al CVT richiede circa 30min.
Sviluppi futuri
Il modello MBS può essere ulteriormente migliorato. Un possibile sviluppo della trasmissione è quello di ottenere un modello MBS in grado di simulare il transitorio di cambiata, modellando i due semipiatti costituenti le pulegge, e definendo due caratteristiche del contatto diverse per i
Conclusioni
due fianchi della cinghia su ogni semipiatto. Il modello potrebbe spingersi sino alla modellazione delle masse centrifughe. Tale sistema accoppiato al manovellismo, consentirebbe di simulare automaticamente la caratteristica di cambiata per una data accelerazione.
Al manovellismo si potrebbero rende flessibili le bielle ed accoppiare il sistema di distribuzioni e la pompa dell’olio, si da completare tutto il sistema motore ed analizzare complessivamente l’influenza reciproca tra tutti i sottosistemi.
Ringraziamenti
Si ringrazia il Prof. Emilio Vitale per aver concesso la possibilità di svolgere questa tesi di laurea per approfondire la conoscenza sulle tecniche di progettazione assistita da codici multibody e FEA.
Un sentito ringraziamento va all’Ing. Francesco Frendo ed all’ingegnere di Piaggio S.p.A. Riccardo Testi per la cortese disponibilità e la puntuale collaborazione che hanno consentito la buona riuscita del lavoro.
Appendice A
Appendice A
Calcolo di massima delle cinghie per CVT
Una cinghia per CVT (a sezione trapezoidale) può ritenersi approssimativamente equivalente nel suo comportamento ad una cinghia piatta avente un coefficiente d’attrito “apparente” m’ che tenga conto dell’incuneamento della cinghia nella gola della puleggia.
Fig. A1 Forze di contatto agenti su sezione trasversale della cinghia
In figura A1 sono rappresentate le forze che agiscono sul fianco dell’elemento di cinghia considerato, per effetto del contatto con la puleggia:
Fn forza normale al fianco;
Ft forza tangenziale dovuta all’attrito tra puleggia e fianco, diretta lungo la direzione di scorrimento dell’elemento di cinghia;
La risultante diretta lungo y, ossia in direzione radiale, è costituita dalla somma delle due componenti radiali Frn, Frt rispettivamente di Fn e Ft, mentre Ftt è la componente lungo x di Ft. Si ha:
( )
( )
α α sen F F sen F F rn n n rn ⋅ = ⋅ ⋅ = 2 2 (A.1)Appendice A
Facendo l’ipotesi che nei confronti dell’incuneamento l’attrito non operi, e che l’aderenza sia tutta disponibile per realizzare la trasmissione della forza nella direzione longitudinale della cinghia (direzione x), per cui g=90°, si ottiene che la risultante in direzione radiale Fr è dovuta solo alla forza normale Fn e non alla forza d’attrito Ft:
( )
nr sen F
F =2⋅ α ⋅ (A.2)
La forza Ft, che nell’ipotesi di g=90° è diretta lungo la lunghezza dell’elemento di cinghia considerato è:
(A.3) Ft =2⋅µ⋅Fn
La relazione che lega Fr ad Ft è dunque, sostituendo l’espressione di Fn ricavata in (A.1) in (A.3):
(A.4)
( )
r r t F F sen F = ⋅ =µ'⋅ α µRicercando l’analogia con il caso delle cinghie piatte si ricava il coefficiente d’attrito apparente:
(A.5)
( )
α µ µ sen = 'L’attrito, tuttavia, è presente anche in direzione radiale, a causa dello spostamento radiale dell’elemento di cinghia nella gola della puleggia. Un’espressione del coefficiente d’attrito apparente che tenga conto anche di tale moto radiale, deve essere funzione della direzione di scorrimento della cinghia, definita dall’angolo di scorrimento g (fig.A1) rispetto alla direzione radiale, che rappresenta però un’incognita. Alcuni studiosi propongono la seguente formula [1 pag. 973]: (A.6)
( )
α µ( )
α µ µ cos ' ⋅ + = senConsiderando un opportuno coefficiente d’attrito apparente, sono applicabili al caso delle cinghie a sezione trapezoidale tutte le ben note formule ricavate per le cinghie piatte, su cui si
Appendice A
basa il seguente schema di calcolo proposto dal produttore di cinghie MITSUBOSHI BELTING LTD.
I dati in ingresso sono:
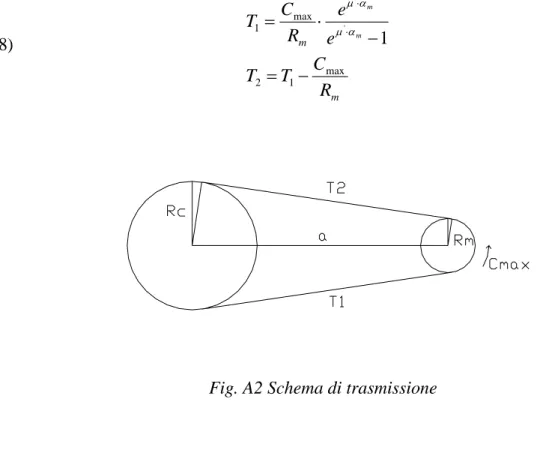
Rm,c raggio di avvolgimento su puleggia motrice / puleggia condotta; a interasse;
Cmax coppia massima;
N giri al minuto del motore a regime di coppia massima; l peso per unità di lunghezza della cinghia;
ht altezza totale della cinghia;
Riferendoci alla figura 1.6 si ricavano i valori degli angoli d’avvolgimento:
⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − ⋅ + = ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − ⋅ − = a R R arcsen a R R arcsen m c c m c m 2 180 2 180 α α (A.7)
I valori delle tensioni nei rami dovute alla coppia trasmessa sono:
m m R C T T e e R C T m m max 1 2 max 1 1 ' ' − = − ⋅ = µ⋅µα⋅α (A.8)
Appendice A
Le due tensioni sui rami devono essere incrementate, ove si desideri considerare anche la forza centrifuga che agisce sulla cinghia nei tratti in cui si trova avvolta nelle pulegge, del seguente termine: 2 2 60 2 m c R N F ⎟ ⋅ ⎠ ⎞ ⎜ ⎝ ⎛ ⋅ ⋅ ⋅ =λ π (A.9)
Per quanto riguarda il computo della pressione trasversale esercitata sui fianchi di un elemento infinitesimo di cinghia, per effetto del contatto con la puleggia, si definisce un fattore, chiamato fattore LT, da cui essa dipende. Tale fattore è in funzione del valore Ac dell’area di contatto su
tutto l’arco d’avvolgimento con la puleggia motrice, proiettata sul piano x-y definito in figura A1: c m t m m c A R C FattoreLT h R A 1 max ⋅ = ⋅ ⋅ =α (A.10)
La pressione laterale si considera proporzionale al fattore LT secondo una costante di proporzionalità k:
(A.11) p=k⋅FattoreLT
La verifica della cinghia consiste nell’imporre le due condizioni: (A.12)
valori della tensione e pressione ammissibili con gli opportuni coefficienti di sicurezza sono
che non compaiono nelle
della potenza massima erogata dal motore alla ruota;
amm amm p p T T < < 1 I
consigliati dal fornitore, e derivano sostanzialmente dall’esperienza. Ovviamente, le proprietà elastiche e le caratteristiche della cinghia
formule precedenti, sono contemplate nei valori di Tamm, pamm, che variano per cinghie diverse.
Una cinghia verificata adottando tali criteri, normalmente possiede una durata accettabile, e soddisfa le sue principali funzionalità, che sono in sintesi:
- resistenza; - trasmissione
- trasmissione della coppia massima; - durata accettabile.
Appendice B
Appendice B
B.1 Costruzione del segmento di cinghia
finish /clear /begin /prep7
!DATI GEOMETRICI DELLA CINGHIA PER L'ANALISI DELLE SUE PROPRIETA'!
ht=16.9 !mm! hf=4.9 !mm! hd=7.6 !mm! b=3.8 !mm! l=10.5 !mm! c=9.9 !mm! p=31 !mm! r1=1.6 !mm! r2=3 !mm! r3=1.75 !mm! alfa1=30 !°! alfa2=14 !°! alfa3=14 !°!
!DATI RIGUARDANTI IL RINFORZO DI FIBRE!
df=1.7 !mm! Navv=15
!PARAMETRI CARATTERIZZANTI LA MESHATURA!
na=4 !inserire numero pari! np=10
Appendice B
!DATI RIGUARDANTI IL MATERIALE DELLA GOMMA E DELLA MEMBRANA EQUIVALENTE AL RINFORZO DI FIBRE!
Egomma=41.8 !N/mm**2! Exmembr=176 !N/mm**2! Eymembr=29430 !N/mm**2! Ezmembr=176 !N/mm**2! pg=0.49 pmxy=0.3 pmyz=0.179e-02 pmxz=0.3 gxy=67.690 !N/mm**2! gyz=67.690 !N/mm**2! gxz=67.690 !N/mm**2! densmedia=1.3e-06 !Kg/mm**3!
!DEFINIZIONE DEGLI STEP DI CARICO TRASVERSALE!
f1=100 !N! f2=200 !N! f3=400 !N! f4=500 !N! f5=600 !N!
!AZZERAMENTO DELLE VARIABILI INDICANTI GLI STEP DI CARICO!
caricol=0 caricom=0 caricot=0
!CALCOLO VARIABILI AUSILIARIE E AREA DEL FIANCO (at) DEL DENTE IN CONTATTO CON LA PULEGGIA!
h1=b-(r1-r1*sin((alfa1*3.141592654)/180)) a=2*(r1*cos((alfa1*3.141592654)/180)+h1*tan((alfa1*3.141592654)/180)) d=c-a p1=p/2-(ht-b)*tan((alfa2*3.141592654)/180) p2=p/2-b*tan((alfa3*3.141592654)/180) pf=p-(2*(hf-b)*tan((alfa2*3.141592654)/180)) sm=((3.141592654*(df)**2)/4)*navv/pf a1=(3.141592654*r2**2)/4 a2=r2*(hd-r3-r2)
Appendice B
a3=r3*l/2 a4=(3.141592654*r3**2)/4 a5=(ht-hd-b)*l/2 a6=r3*(l/2-r2-r3) at=2*(a1+a2+a3+a5-a4-a6)/cos((alfa2*3.141592654)/180)!INTRODUZIONE DEI KEYPOINTS DI MEZZA SEZIONE TRASVERSALE DEL SEGMENTO ANALIZZATO! k,1,l/2,-(ht-r2),p/2 k,2,l/2,-ht,p/2 k,3,(l/2-r2*sin((45*3.141592654)/180)),-(ht-r2+r2*cos((45*3.141592654)/180)),p/2 k,4,(l/2-r2),-(ht-r2),p/2 k,5,(l/2-r2),-(ht-hd+r3),p/2 k,6,(l/2-r2-r3),-(ht-hd),p/2 k,7,0,-(ht-hd),p/2 k,8,(l/2-r2-r3),-(ht-hd+r3),p/2 k,9,0,-b,p/2 k,10,l/2,-b,p/2 k,11,0,-hf,p/2 k,12,l/2,-hf,p/2 k,13,(l/2-r2/2),-(ht-r2),p/2 k,14,(l/2-r2/2),-(ht-r2/2),p/2 k,15,l/2,-(ht-r2/2),p/2 k,16,l/2,0,p/2 k,17,a/2,0,p/2 k,18,(r1*cos((alfa1*3.141592654)/180)),-h1,p/2 k,20,0,-(b-r1),p/2
!INTRODUZIONE DELLE LINEE!
larc,2,3,1,r2 larc,3,4,1,r2 l,4,13 l,13,1 l,1,15 l,15,2 l,13,14 l,14,15 l,14,3 l,4,5 larc,5,6,8,r3 l,6,7 lsel,,line,,11,12 lcomb,all lsel,all
Appendice B
l,12,5 l,7,11 l,11,12 l,12,1 l,11,9 l,10,12 l,17,18 larc,18,9,20,r1 l,16,17 lsel,,line,,18,19 lcomb,all lsel,all l,9,10 l,16,10 al,1,9,8,6 al,9,2,3,7 al,7,4,5,8 al,3,10,12,15,4 al,11,13,14,12 al,14,16,17,19 al,18,19,20,21 local,12,0,l/2,0,0 csys,12 arsym,x,all!DEFINIZIONE DELLE AREE PER LA CREAZIONE DELL'INCLINAZIONE DEL FIANCO E DELLA DENTATURA SUPERIORE!
nummrg,kp csys,0 k,40,0,-b,p/2 k,41,l,-b,p/2 k,42,0,-ht,p1 k,43,l,-ht,p1 l,40,41 l,41,43 l,43,42 l,42,40 k,44,0,0,p2 k,45,l,0,p2 l,40,44 l,41,45
Appendice B
l,44,45
al,31,37,29,25 al,41,44,25,43
!ESTRUSIONE DELLA SEZIONE TRASVERSALE DEL SEGMENTO ANALIZZATO!
voffst,1,p/2 voffst,2,p/2 voffst,3,-p/2 voffst,4,-p/2 voffst,5,p/2 voffst,6,-p/2 voffst,7,-p/2 voffst,8,p/2 voffst,9,p/2 voffst,10,-p/2 voffst,11,-p/2 voffst,12,p/2 voffst,13,-p/2 voffst,14,-p/2
!OPERAZIONE BOOLEANA PER LA CREAZIONE DELL'INCLINAZIONE DEL FIANCO E DELLA DENTATURA SUPERIORE!
vsba,all,15,,,delete vsba,all,16,,,delete
!INCOLLAMENTO DELLE VARIE PORZIONI DI VOLUME DA MESHARE (MAPPED) DEFINENTI L'INTERO SEGMENTO DI CINGHIA!
*if,p2,gt,p1,then p3=p1 *else p3=p2 *endif vsel,,loc,z,p3,p/2 vdele,all,,,1 vsel,all vglue,all
!SUDDIVISIONE DELLE LINEE PER LA MESHATURA!
Appendice B
lesize,all,,,np lsel,all lsel,,tan2,z,1 lesize,all,,,np lsel,all lsel,,loc,y,-ht,-(ht-r2) lesize,all,,,na/2 lsel,all lsel,,loc,y,-(ht-r2)+0.0001-hf,-hf lesize,all,,,na lsel,all lsel,,loc,y,-hf+0.0001,-b+0.0001 lesize,all,,,na/2 lsel,all lsel,,loc,y,-b+0.0001,-0.0001 lesize,all,,,nb lsel,all lsel,,loc,y,0 lesize,all,,,na/2 lsel,all!DEFINIZIONE DEGLI ELEMENTI!
et,1,45 et,2,41 r,2,sm
!DEFINIZIONE DELLE PROPRIETA' DEI MATERIALI!
mp,ex,1,egomma mp,nuxy,1,pg mp,dens,1,densmedia mp,ex,2,exmembr mp,ey,2,eymembr mp,ez,2,ezmembr mp,nuxy,2,pmxy mp,nuyz,2,pmyz mp,nuxz,2,pmxz mp,gxy,2,gxy mp,gyz,2,gyz mp,gxz,2,gxz
!MESHATURA CON OPZIONE A SCELTA SULLA FORMA DEGLI ELEMENTI (TETRAEDRICA O ESAEDRICA)!
accat,143,16 accat,51,161
Appendice B
vsel,all
*ask,fl1,analisi lineare (0) o non lineare (1)? *if,fl1,eq,1,then nlgeom,on mshape,1,2d mshape,1,3d *else mshape,0,2d mshape,0,3d *endif numstr,node,3 type,2 real,2 mat,2 asel,,loc,y,-hf amesh,all asel,all type,1 mat,1 vmesh,all n,2,l,-hf,pf/2 nummrg,node eplot
CALCOLO DELLE PROPRITA' INERZIALI DEL SEGMENTO
vsymm,z,all,,,,0 vsum finish B.2 Carico longitudinale finish /prep7 csys,0
Appendice B
nsel,all eplot *if,caricol,eq,1,then *else *if,caricom,eq,1,then lsclear,all cedele,all caricom=0 nsel,,node,,1 ddele,all,all nsel,all *else *if,caricot,eq,1,then lsclear,all cpdele,all caricot=0 et,4,4 r,4,1,1,1,1,1 type,4 real,4 n,1,l,-hf,0-0.1 e,1,2 et,3,63 r,3,1 type,3 real,3 asel,,loc,x,l amesh,all asel,all *else vsel,,loc,z,0,-p/2 vclear,all asel,,loc,z,0,-p/2 aclear,allAppendice B
asel,all vdele,all,,,1 vsel,all et,4,4 r,4,1,1,1,1,1 type,4 real,4 n,1,l,-hf,0-0.1 e,1,2 et,3,63 r,3,1 type,3 real,3 asel,,loc,x,l amesh,all asel,all *endif *endif!VARIABILE INDICANTE LA LETTURA DELLO STEP DI CARICO (1=acceso)!
caricol=1
!INTRODUZIONE DEI VINCOLI!
asel,,loc,z,0 da,all,symm asel,all asel,,loc,x,0 da,all,all,0 asel,all
Appendice B
nsel,,loc,x,l nsel,r,loc,z,-0.2,0 cerig,1,all,ux,uy,rotz nsel,all nsel,,loc,x,l nsel,r,loc,z,0.0001,p/2 nsel,a,node,,1 cerig,1,all,all nsel,all d,1,uy,0 d,1,uz,0 d,1,rotx,0 d,1,roty,0 d,1,rotz,0!DEFINIZIONE DELLO STEP DI CARICO!
time,1 nsubst,5 f,1,fx,0.5 lswrit *endif !SOLUZIONE! /solu antype solve
!CARICA LO SPOSTAMENTO UX DEI NODI DELLA SEZIONE CARICATA!
/post1 pldisp,2
Appendice B
nsel,,loc,x,l prnsol,u,x finish B.3 Carico momento finish /prep7 csys,0 nsel,all eplot *if,caricom,eq,1,then *else *if,caricol,eq,1,then lsclear,all cedele,all caricol=0 nsel,,node,,1 ddele,all,all nsel,all *else *if,caricot,eq,1,then lsclear,all cpdele,all caricot=0 et,4,4 r,4,1,1,1,1,1 type,4 real,4 n,1,l,-hf,0-0.1 e,1,2 et,3,63 r,3,1Appendice B
type,3 real,3 asel,,loc,x,l amesh,all asel,all *else vsel,,loc,z,0,-p/2 vclear,all asel,,loc,z,0,-p/2 aclear,all asel,all vdele,all,,,1 vsel,all et,4,4 r,4,1,1,1,1,1 type,4 real,4 n,1,l,-hf,0-0.1 e,1,2 et,3,63 r,3,1 type,3 real,3 asel,,loc,x,l amesh,all asel,all *endif *endif!VARIABILE INDICANTE LA LETTURA DELLO STEP DI CARICO (1=acceso 2=spento)!
caricom=1
Appendice B
asel,,loc,z,0 da,all,symm asel,all asel,,loc,x,0 da,all,all,0 asel,all!INTRODUZIONE DEL SET RIGID REGION!
nsel,,loc,x,l nsel,r,loc,z,-0.2,0 cerig,1,all,ux,uy,rotz nsel,all nsel,,loc,x,l nsel,r,loc,z,0.0001,p/2 nsel,a,node,,1 cerig,1,all,all nsel,all d,1,ux,0 d,1,uy,0 d,1,uz,0 d,1,rotx,0 d,1,roty,0
!DEFINIZIONE DELLO STEP DI CARICO!
time,1 nsubst,5 f,1,mz,0.5 lswrit *endif !SOLUZIONE!
Appendice B
/solu antype solve
!CARICA LO SPOSTAMENTO UX DEI NODI DELLA SEZIONE CARICATA!
/post1 pldisp,2 nsel,,node,,1 prnsol,rot,z Finish B.4 Carico trasversale finish /prep7 csys,0 nsel,all eplot *if,caricot,eq,1,then *else *if,caricom,eq,1,then lsclear,all cedele,all caricom=0 asel,,loc,x,l aclear,all asel,all nsel,,node,,1 ddele,all,all nsel,all esel,,type,,4 edele,all
Appendice B
esel,all ndele,1 *else *if,caricol,eq,1,then lsclear,all cedele,all caricol=0 asel,,loc,x,l aclear,all asel,all nsel,,node,,1 ddele,all,all nsel,all esel,,type,,4 edele,all esel,all *else vsel,,loc,z,0,-p/2 vclear,all asel,,loc,z,0,-p/2 aclear,all asel,all vdele,all,,,1 vsel,all *endif *endif!VARIABILE INDICANTE LA LETTURA DELLO STEP DI CARICO (1=acceso)!
caricot=1
!INTRODUZIONE DEI VINCOLI!
Appendice B
da,all,symm da,all,uy,0 asel,all asel,,loc,x,l/2 da,all,ux,0 asel,all!INTRODUZIONE DEL SET COUPLED!
local,13,0,0,-b,p/2,0,14,0 asel,,loc,z,0 nsla,,1 cp,1,uz,all asel,all nsel,all
!DEFINIZIONE DELLO STEP DI CARICO!
time,1 nsubst,5 asel,,loc,z,0 sfa,all,,pres,f1/at asel,all lswrit *endif !SOLUZIONE! /solu antype solve
Appendice B
/post1 pldisp,2 nsel,,loc,z,0 prnsol,u,z finishBibliografia
[1] Manuale dell’ingegnere meccanico, HOEPLI (1996);
[2] D.Vettori Simulazione dinamica di una trasmissione CVT per motorscooter tramite codice multibody, Archivio tesi Università di Pisa;
[3] E. Funaioli, A. Maggiore, U. Meneghetti, Lezioni di meccanica applicata alle macchine, Vol. I, Pàtron Editore;
[4] E.Pistolesi Meccanica Applicata alle macchine Vallerini Editore Pisa-Roma, 1941; [5] D.Giacosa Motori Endotermici Biblioteca Tecnica Hoepli, 2000;
[6] C.Basile Motori e Autoveicoli:per allievi motoristi delle scuole industriali, Libreria Editrice Universitaria Leprotto & Bella,1984;
[7] F.Buffoni L’Autoveicolo, Ulrico Hoepli Milano,1965;
[8] Riccardo Testi, Luigi Arnone, Maurizio Marcacci, Piaggio & C. Spa, 88 CAE analysis of a CVT toothed belt, JSAE;
[9] Adams / Engine Product Guides, Guida Utente; [10] Adams / Solver Product Guides, Guida Utente;