7
7
A
A
p
p
p
p
l
l
i
i
c
c
a
a
z
z
i
i
o
o
n
n
e
e
s
s
u
u
s
s
e
e
g
g
n
n
a
a
l
l
i
i
a
a
c
c
q
q
u
u
i
i
s
s
i
i
t
t
i
i
t
t
r
r
a
a
m
m
i
i
t
t
e
e
s
s
c
c
a
a
n
n
s
s
i
i
o
o
n
n
e
e
f
f
M
M
R
R
I
I
e acquisizioni dei dati utilizzati in questo capitolo sono state realizzate presso il laboratorio di risonanza magnetica dell’istituto di fisiologia clinica del Consiglio Nazionale delle Ricerche (CNR) di Pisa.
Il paziente è stato sottoposto a stimoli visivi sotto forma di flash in modo da ottenere un protocollo caratterizzato da un Ton (periodo in cui
viene presentato lo stimolo) di 21 secondi e un Toff (periodo in cui lo
stimolo è assente) della medesima durata.
I dati sono stati acquisiti utilizzando un repetition time (TR) = 3 secondi, un echo time (TE) = 40 millisecondi, un flip angle pari a 90° e sono stati organizzati in slice delle dimensioni di 128 per 128 voxel.
7.1 Scelta delle serie temporali tramite regressione lineare
La scelta dei segnali su cui applicare gli algoritmi deconvolutivi è stata fatta tramite il metodo regressivo in modo tale da essere sicuri di operare su voxel statisticamente significativi, tali cioè da poter essere effettivamente dichiarati attivi.
Questo metodo si basa sulla predizione di una serie temporale di riferimento (“ideale”) che ha la forma della risposta fMRI che ci si aspetta,
ad esempio quella vista nel capitolo 5 basata sulla teoria dei sistemi lineari invarianti. Indicando quindi con y(t) la serie di riferimento essa può essere
espressa come: dm m f m t h t y T ) ( ) ( ) ( 0
∫
− = (6.1)dove T è l’intervallo di integrazione, h(t) è la risposta impulsiva del voxel
vista nella (5.1) e f(t) è il paradigma di eccitazione a cui è sottoposto il
paziente (vale 0 all’istante t in cui lo stimolo non è presente, vale 1 quando lo stimolo viene presentato). Ovviamente noi abbiamo a che fare con segnali campionati e discretizzati, perciò consideriamo
m n n m m m n m m n n h f h f y − = = −
∑
∑
= = 0 0 (6.2)in cui ancora una volta nella scelta di h(t) non si è tenuto conto del TR o
della temporizzazione dello stimolo. Indicando ora con z(t)il segnale in
uscita per ogni voxel e con zn la corrispondente serie temporale discreta, si
può generalizzare al caso di N uscite scrivendo:
n p m m n m n h f Z =
∑
+ε =0 − (6.3)Nella (6.3) εn rappresenta un termine di rumore bianco gaussiano
aggiuntivo e l’indice p in sommatoria sta ad indicare che la risposta è considerata nulla per istanti n≥ p con p fissato.
In realtà le misure dei dati fMRI sono meglio approssimate da una costante β0, da un termine lineare β1n e da un ulteriore termine di rumore
n
ε , in aggiunta al segnale y(t). In questo modo si ha che:
n p n p n n n n n y n n h f h f h f Z = +β0 +β1 +ε =β0+β1 + 0 + 1 −1+...+ − +ε (6.4) per n= p,p+1,...,N−1.
La (6.4) può essere riscritta usando la notazione matriciale, utile anche per una pratica implementazione Matlab:
⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = − + 1 1 . . . N p p Z Z Z Z , ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − + = − − − + 1 1 1 1 0 . . . 1 1 . . . . . . . . . . . . . . . . . . 1 1 . . . 1 p N N p p f f N f f p f f p X , ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = p h h . . . 0 1 0 β β β , ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = − + 1 1 . . . N p p ε ε ε ε .
Quindi l’equazione diventa Z = Xβ+ε e risolvere il problema con il metodo della regressione lineare significa trovare una stima b=βˆ del
vettore β dei parametri incogniti tale per cui si abbia una buona approssimazione dei dati.
Così si ottiene una buona stima Zˆ =Xb ad esempio minimizzando la
somma degli scarti quadratici tra i valori stimati e i dati:
) ˆ ( ) ˆ ( ) ˆ ( ) ( 2 1 0 Z Z Z Z Z Z b Q SSE T N i i i− = − − = =
∑
− = 6.5)è facile dimostrare che:
⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ = = − p T T h h Z X X X b ˆ . . . ˆ ˆ ˆ ) ( 0 1 0 1 β β (6.6)
e quindi b contiene i parametri stimati della risposta impulsiva.
7.2 Segnali utilizzati
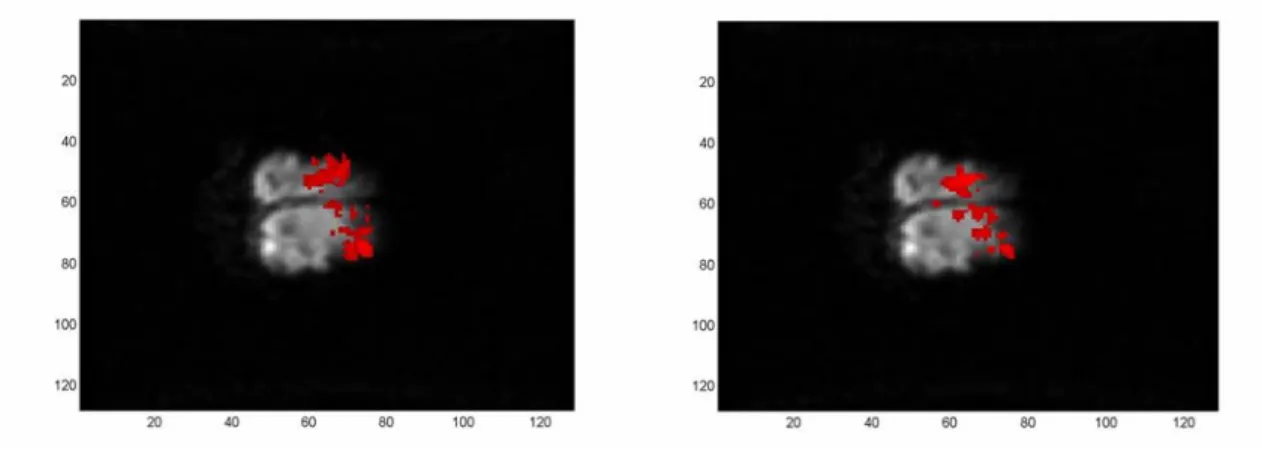
Usando gli strumenti predisposti nel paragrafo precedente ci possiamo ricavare delle utili mappe di attivazione tra le slice acquisite. Facendo uso della risposta fMRI aspettata di figura 5.2 b e della stessa risposta sfasata di 3 secondi si ottengono, per regressione lineare, le mappe di figura 6.1 pertinenti ad una medesima fetta, in cui i voxel con una variazione di
intensità relativa maggiore appaiono di un colore rosso intenso mentre quelli con attivazione inferiore appaiono di un colore rosso scuro.
Fig. 6.1 Mappe di attivazione ottenute per regressione lineare sfruttando due risposte fMRI stimate sfasate di 3 sec.
Dalla figura appare chiaramente che voxel che corrispondono ad aree corticali sovrintendenti ai medesimi processi visivi vengono attivati con un certo ritardo relativo. Per questo, anche allo scopo di valutare tale ritardo, scegliamo una serie temporale associata ad un voxel della figura di sinistra di coordinate (74,76) e posizionato nell’emisfero sinistro. Corrispondentemente prendiamo il segnale relativo al voxel di coordinate (69,71) dell’emisfero sinistro di figura 6.1 a destra.
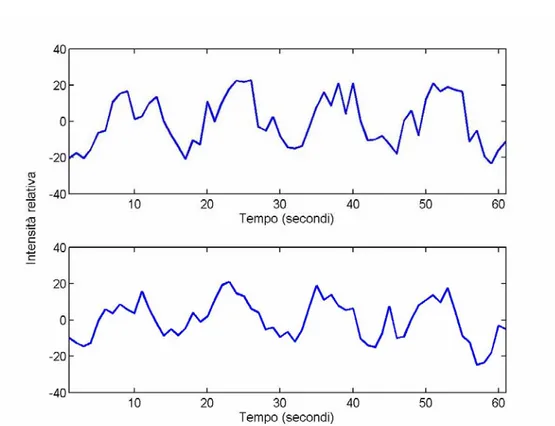
I due andamenti temporali acquisiti (ricordiamo che essi sono stati indotti dal medesimo paradigma di eccitazione visiva) sono mostrati in figura 6.2, mentre in figura 6.3 è presentata una loro sovrapposizione per facilitare la visualizzazione dello sfasamento reciproco. Tale sfasamento è valutabile in 2,01 secondi in base all’algoritmo di stima del ritardo proposto in appendice
Fig. 6.2 Segnali acquisiti dai due voxel
Fig. 6.3 Sovrapposizione dei segnali acquisiti dai due voxel con sfasamento stimato pari a 2.01 sec.
7.3 Estrazione delle sorgenti e valutazione del ritardo
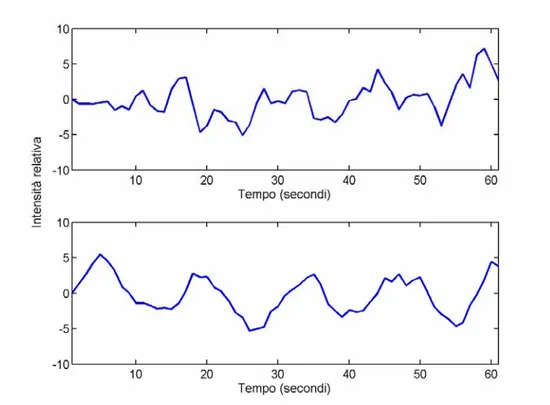
Utilizzando ora l’algoritmo deconvolutivo nel dominio del tempo basato sul Gradiente Naturale ci si aspetta che esso estragga un’unica componente indipendente che è quella relativa all’unico paradigma di eccitazione utilizzato. Il risultato ottenuto è mostrato in figura 6.4
Fig. 6.4 Sorgenti deconvolute
In figura 6.4 in basso è riconoscibile la presenza di un andamento temporale tipico della componente indipendente cercata, di periodo paragonabile al periodo di 21 secondi del protocollo di stimolazione, mentre nel diagramma in alto non è riconoscibile nessun segnale utile ma solo il contributo di rumore ed artefatti.
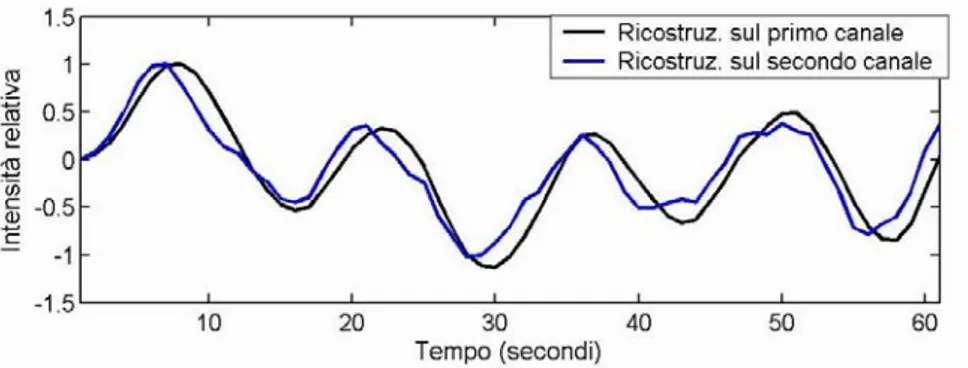
In ordine, ora, al tentativo di valutazione del ritardo introdotto dai processi convolutivi del mezzo cerebrale, ricostruiamo la componente utile
su due canali e valutiamo lo sfasamento relativo tra i segnali così ottenuti. Il risultato di questa operazione è riprodotto in figura 6.5 in cui si nota la capacità dell’algoritmo di fornire informazioni riguardo al valore effettivo dello sfasamento temporale. Il ritardo ∆t medio calcolato con il solito
algoritmo proposto in appendice vale 1,58 secondi.
Fig. 6.5 Componente indipendente ricostruita sui due canali (voxel)
7.3.2
Separazione nel dominio frequenziale
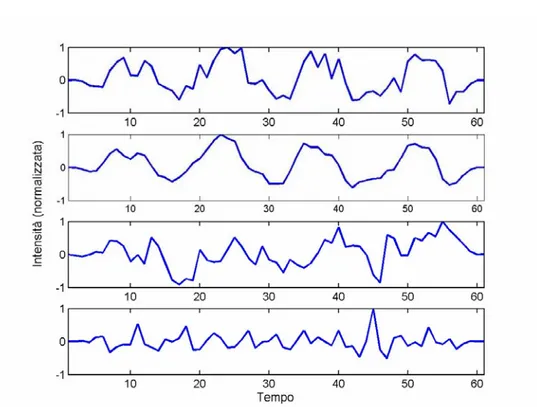
L’algoritmo di BSS convolutiva nel dominio frequenziale con l’utilizzo del metodo FastICA per la separazione delle componenti indipendenti in frequenza, conduce a risultati migliori per quanto riguarda la valutazione del ritardo temporale introdotto dal canale. Come primo passo riportiamo in figura 6.6 gli andamenti delle componenti ricostruite e normalizzate nei rispettivi canali, ottenute con finestre sovrapposte per il 90%. Si nota immediatamente la presenza della componente utile sui primi due canali, mentre nei restanti canali compare il risultato di rumore ed artefatti.
Fig. 6.6 Contributi delle componenti deconvolute nei rispettivi canali. Segnale utile in alto, rumore più artefatti in basso.
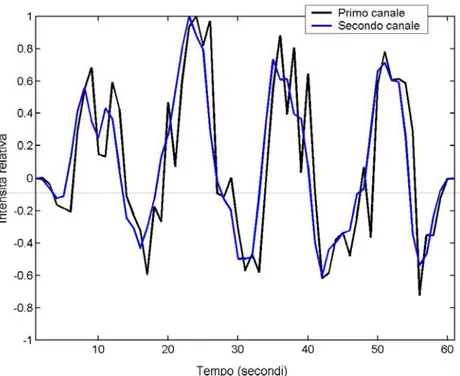
A questo punto possiamo valutare qualitativamente il ritardo temporale introdotto dal mezzo cerebrale (rappresentato dai due voxel sotto esame) confrontando tra loro i contributi del segnale utile ricostruiti sui due canali di uscita (figura 6.7 di pagina seguente).
Nella solita figura si può osservare la presenza di un evidente sfasamento reciproco tra i segnali, tuttavia, così come fatto nell’analisi dei dati simulati quale indice quantitativo si può valutare il coefficiente di correlazione tra i segnali utili ricostruiti, ottenendo in questo caso un valore di 0.88, mentre il solito coefficiente tra i segnali provenienti dai due voxel è di 0.73. Inoltre lo stimatore del ritardo evidenzia un ∆t pari a 1.35 secondi.
Fig. 6.7 Reciproco sfasamento dei segnali utili ricostruiti in uscita
7.4 Confronto con il modello istantaneo
In funzione dei risultati ottenuti è interessante applicare, così come fatto per i dati simolati, l’algoritmo FastICA ai segnali acquisiti dai due voxel e mostrati in figura 6.2. Ancora si è scelto di massimizzare la neg-entropia e usare come non-linearità la tangente iperbolica, ottenendo come risultato gli andamenti di figura 6.8.
Fig. 6.8 Componenti indipendenti separate con l’algoritmo FastICA
I risultati ottenuti dimostrano un evidente peggioramento nell’individuazione della componente indipendente che appare molto più “sporcata” dal rumore rispetto, per esempio, a quella ottenuta con l’algoritmo deconvolutivo di figura 6.4.