3. CONTESTO E OBBIETTIVI DELLA TESI
3.1 La propulsione SPT a Centrospazio
I sistemi di propulsione elettrica ad alta potenza stanno divenendo rapidamente una alternativa efficace alla propulsione chimica tradizionale, sia per il sollevamento orbitale, sia per le manovre di posizionamento finale sull’orbita (NSSK, controllo d’assetto) di strutture di grandi dimensioni. In particolare questo tipo di propulsori si rivelano molto interessanti per i satelliti geostazionari da telecomunicazioni che da anni dominano il mercato delle applicazioni spaziali.
Tra i vari tipi di propulsori elettrici, sembra molto promettente per le applicazioni ad alta potenza la famiglia di motori ad effetto Hall sia nella tipologia SPT (Stationary Plasma Thruster) sia del tipo TAL (Thruster with Anode Layer); essi, infatti, presentano livelli di rendimento dell’ordine del 60% unitamente a minori problemi di danneggiamento per erosione rispetto ai motori a ioni con griglia di accelerazione (motori tipo Kaufmann).
Figura 3-1 Il motore SPT-70 di Centrospazio.
3.1.1 Il motore SPT da 5 kW
Si prevede che la potenza disponibile a bordo di un satellite cresca nei prossimi anni fino a qualche kilowatt, rendendo così possibile l’impiego di motori elettrici ad alta potenza.
In questa prospettiva al Centrospazio è stato studiato, progettato, realizzato e sottoposto a prove sperimentali un propulsore SPT da 5 kW [ 10 ],
[ 11 ]. In Figura 3-2 è mostrato il motore montato in camera a vuoto durante la
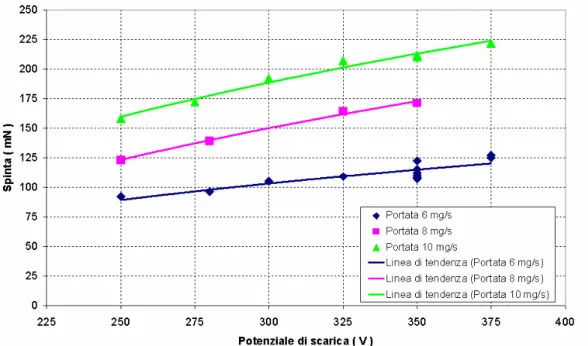
fase di allestimento della campagna di sperimentazione, in Figura 3-3 si può vedere il propulsore in funzione ed infine in Figura 3-4 sono riportati alcuni dati sperimentali ottenuti.
Figura 3-4 Risultati sperimentali del motore SPT da 5 kW.
3.1.2 Ricerca sul neutralizzatore
Per effettuare la sperimentazione sul motore SPT da 5 kW sono stati utilizzati catodi neutralizzatori presi in prestito o acquistati da aziende esterne. E’ quindi nato l’interesse, nell’ambito di Centrospazio, verso l’acquisizione della tecnologia necessaria alla realizzazione in proprio di questo tipo di dispositivi. Sono state svolte pertanto ricerche riguardanti il funzionamento e la progettazione dei catodi cavi con particolare attenzione ai fenomeni nella zona dell’inserto.
Il lavoro svolto nella presente tesi si inserisce in questo contesto di ricerca e ha come obbiettivo quello di capire il funzionamento e creare le basi per la progettazione del catodo neutralizzatore nella configurazione con orifizio. Partendo dall’analisi del catodo cavo svolta in tesi precedenti, [ 12 ],
[ 13 ], è stato sviluppato quindi un modello fisico-matematico di una
particolare zona del dispositivo (orifizio) ed è stata analizzata la sua influenza sulle prestazioni. Successivamente, anche sulla base dei risultati ottenuti dal
modello appena citato, è stato fatto il dimensionamento del neutralizzatore, seguito dall’analisi termica dello stesso.
3.2 Analisi delle fasi di progetto
Il progetto si articola nelle seguenti fasi:
- modellazione di una parte del neutralizzatore (orifizio) con MATLAB 6.1;
- dimensionamento del dispositivo in base a: risultati del modello numerico, modelli semplici implementati in MATLAB 6.1 e criteri empirici dedotti dalla letteratura;
- verifica termica attraverso simulazioni numeriche condotte con ANSYS 6.1.
Nella prima fase è sviluppato il modello fisico-matematico della zona dell’orifizio. I lavori precedenti, infatti, trattavano questa parte del neutralizzatore tramite l’utilizzo di coefficienti di perdita, trascurando del tutto i fenomeni locali, restituendo inevitabilmente una soluzione approssimata del funzionamento del dispositivo. Questo modello ha permesso di indagare le condizioni operative in tale zona e di capire come la sua geometria influenza le prestazioni complessive del catodo.
Successivamente sono stati analizzanti articoli e pubblicazioni del settore (essenzialmente AIAA Papers ed IEPC Papers) alla ricerca di criteri guida per la progettazione. Una volta stabilita l’architettura di base del catodo, si è passati a dimensionare le sue parti, compatibilmente con i requisiti
3.3 Requisiti di progetto
Nel presente lavoro di progettazione di un neutralizzatore per un propulsore ad effetto Hall ad alta potenza, sono stati seguiti criteri generali come guida alla scelta della configurazione e delle soluzioni costruttive:
- semplicità del progetto in funzione di una maggiore affidabilità del dispositivo;
- utilizzo di tecnologie il più possibile convenzionali per contenere i costi di produzione;
- dimensioni contenute;
- contenimento della temperatura operativa;
- possibilità di interfaccia con parti ed attrezzature già disponibili presso il CentroSpazio.
I requisiti tecnici del neutralizzatore sono riportati di seguito e sono dettati dall’obbiettivo di usarlo nel propulsore ad effetto Hall da 5 kW di potenza operante con gas xeno, disponibile presso il CentroSpazio di cui abbiamo già parlato in precedenza.
Corrente
La corrente massima fornita da questo dispositivo è di 20 A.
Potenza
La potenza nominale assorbita dal catodo in fase di riscaldamento deve essere inferiore a 200 W.
Alimentazione gassosa
La portata di gas utilizzata deve essere contenuta nell’intervallo compreso tra 0.1 e 1 mg/s.
Transitorio di accensione
Il dispositivo deve essere in grado di raggiungere le condizioni di attivazione dell’inserto (1200°C) con un tempo di riscaldamento limitato a 20 minuti.
Requisiti termici
La temperatura massima tollerabile sulla flangia di collegamento, all’interfaccia col supporto, è di 700 K. Questa temperatura deve essere verificata sia in condizioni di superficie posteriore di interfacciamento irraggiante, sia in condizioni di adiabaticità, ipotizzando, per le condizioni di prova in laboratorio, una temperatura ambiente di fondo di 25°C.