CAPITOLO 6
Identificazione modulare e identificazione
diretta di due boost operanti in parallelo
6.1 Introduzione
La tecnica di modellazione di più convertitori in parallelo descritta nel paragrafo 2.4 viene qui usata per effettuare una identificazione modulare del sistema di due convertitori identici a quello in esame: usando lo stesso approccio usato nella tecnica di modellazione, è possibile ottenere un modello del sistema complessivo che deriva da quello del singolo modulo semplicemente sostituendo in 2.47 e 2.48 le fdt ottenute al capitolo 5 con l’identificazione del singolo convertitore.. Viene poi presentata la identificazione diretta del sistema dei due convertitori e la successiva fase di validazione del modello trovato. Il
Gx' Gi' Yx' Yin' T' essendo: u = T c c v vˆ , ˆ ) ( 0 1 (6.2) n = T g in in v i vˆ , ˆ ,ˆ ) ( 1 0 (6.3) y = T in in out i i vˆ , ˆ , ˆ ) ( 0 1 (6.4) Essendo i due convertitori uguali le espressioni 2.44 si semplificano e diventano quelle di 2.47 e 2.48 che qui riportiamo per comodità:
= =α 2 ' out out Z Z
;
2 ' v v G G j =;
2 ' s s A A =;
2
' v xG
T
G
=
;2
' s xTA
Y
=
;2
'T
T
=
; (6.5) ); 2 ( ' v i i G T G G = − ); 2 ( ' s in in TA Y Y = −convertitore ed operando la semplificazione di modello (vedi tabella 5-14), si ricavano le funzioni di trasferimento del sistema complessivo, riportate in tabella 6-1 .
Tab. 6-1
Identificazione del sistema di 2 Boost in parallelo derivata dal modello del singolo convertitore
1 0009275 . 0 10 756 . 1 5 . 12 001122 . 0 6 ' + + ⋅ + − = − s s Gv 92 . 3 01203 . 0 10 467 . 1 10 475 . 1 84 . 56 1175 . 0 0002252 . 0 2 5 3 8 2 ' + + ⋅ + ⋅ + + − = − − s s s s s Gi 1 0009275 . 0 10 756 . 1 98 . 0 6 ' + + ⋅ = − s As 92 . 3 01203 . 0 10 467 . 1 10 475 . 1 096 . 4 007539 . 0 10 498 . 1 2 5 3 8 2 5 ' + + ⋅ + ⋅ + + ⋅ = − − − s s s s s Yin 1 0009275 . 0 10 756 . 1 98 . 0 002099 . 0 6 ' + + ⋅ − − = − s s Zout 1 0009275 . 0 10 756 . 1 98 . 0 6 ' + + ⋅ = − s T 92 . 3 01203 . 0 10 467 . 1 10 475 . 1 49 004396 . 0 2 5 3 8 ' + + ⋅ + ⋅ − = − − s s s s Gx 92 . 3 01203 . 0 10 467 . 1 10 475 . 1 842 . 3 2 5 3 8 ' + + ⋅ + ⋅ − = − − s s s Yx
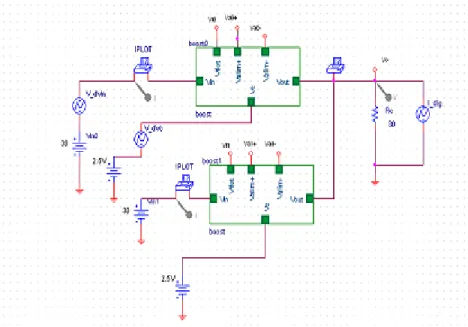
e poi si applica l’algoritmo delle funzioni modulanti.. La figura 6-1 riporta lo schema Orcad-Capture usato nelle simulazioni.
Fig 6-1 Schema Orcad-Capture di due convertitori in parallelo
Definendo l’ingresso u, il disturbo n e l’uscita y come in 6.2, 6.3 e 6.4 rispettivamente, e supponendo il sistema lineare, occorre determinare le matrici di trasferimento M ed N t.c.
y = M u + N n (6.5)
M =
Gi
Gx
Gx
Gi
Gv
Gv
; N = T Yin Yx T Yx Yin Zout As As (6.6) avendo posto: 1 0 c out c out v v v v Gv= = ; 1 1 0 0 c in c in v i v i Gi= = ; 1 0 0 1 c in c in v i v i Gx= = ; 1 0 in out in out v v v v As= = ; 1 1 0 0 in in in in v i v i Yin= = ; 1 0 0 1 in in in in v i v i Yx= = ; (6.7) g out i v Zout= ; g in g in i i i i T = 0 = 1 ;Gli ingressi usati per la identificazione delle varie funzioni di trasferimento condividono tutti i seguenti parametri:
Durata simulazione Campionamento rumore Pulsazione di taglio filtro Campionamento segnale 400 ms 15 ms 10000 rad/s 30 us
La forma e il range di variazione del segnale di ingresso, invece, variano opportunamente con la funzione di trasferimento da identificare. In fase di predisposizione dei dati
6.3.2 Identificazione di Gv, Gi, Gx
I risultati dell’identificazione sono riassunti in tabella 6-2
Tab. 6-2
(variaz . di 0.10V ripetto a Vc)
Idemt. di Gv Ident. di Gi Ident di Gx
T E T E 3poli 0.013 0.1164 NP NP 0.016 0.3949 3poli 1 zero 0.01 0.1122 0.055 0.4157 0.013 0.3951 3poli 2 zeri 0.019 0.1130 0.013 0.3950 0.013 0.3953 2poli 0.046 0.1115 0.040 0.4078 0.013 0.3976 2poli1zero 0.019 0.1232 0.013 0.3965 0.013 0.3965
I modelli scelti sono quelli corrispondenti ai valori minimi dell’errore medio E (valori in grassetto in tabella 6-2), e sono riportati nelle figure 6-3,6-4 e 6-5.
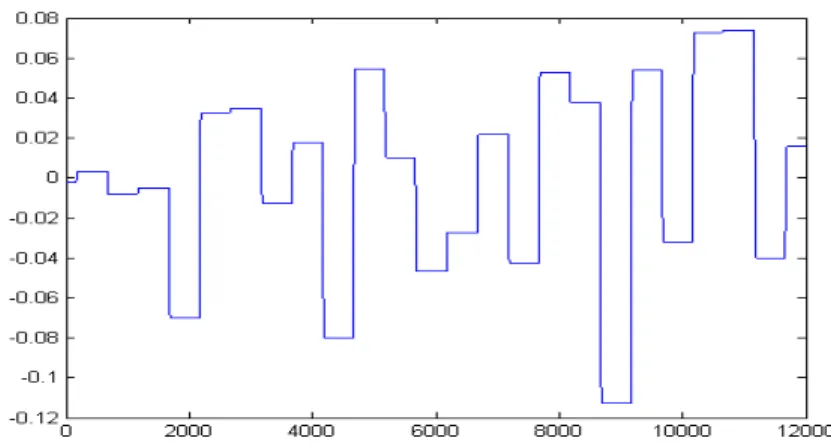
con 3 poli e 2 zeri per Gi e uno di 3 poli per Gx, in totale accordo con i risultati della modellazione (tabella 6-1.). La figura 6.2 riporta il segnale di ingresso usato per l’identificazione delle tre funzioni di trasferimento.
Fig 6-2 Segnale di ingresso usato per identificare Gv, Gi, Gx
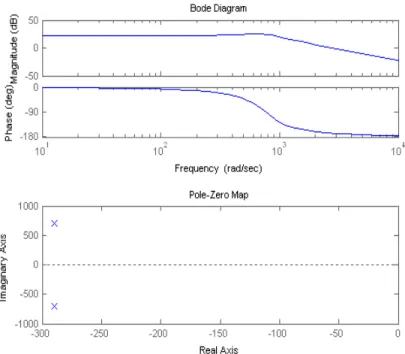
I modelli ottenuti e i relativi diagrammi sono riportati di seguito.
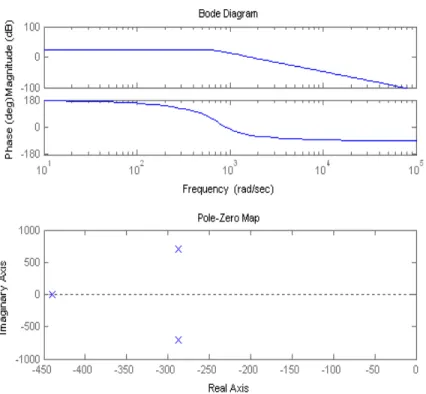
1 0009956 . 0 10 72 . 1 55 . 12 2 6 + + ⋅ = − s s Gv 1 002521 . 0 10 086 . 4 10 07 . 4 18 0218 . 0 10 78 . 6 2 6 2 9 5 + + ⋅ + ⋅ + + ⋅ = − − − s s s s s Gi 1 003275 . 0 10 027 . 4 10 972 . 3 16 2 6 2 9 + ⋅ + + ⋅ − = − − s s s Gx
Fig. 6-3 Diagrammi del modello Gv
Fig. 6-5 Diagrammi del modello Gx
6.3.3 Validazione di Gv, Gi, Gx
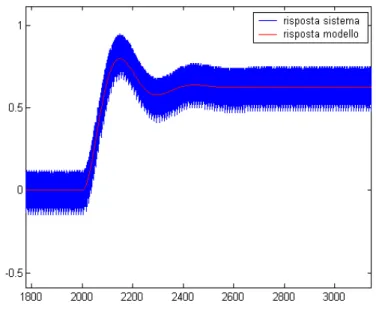
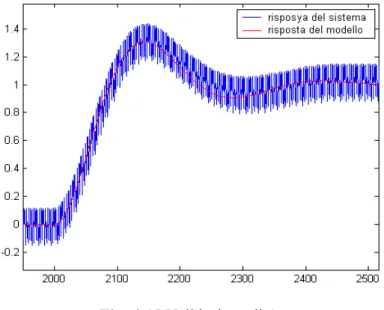
I modelli identificati sono stati sottoposti a validazione mediante l’analisi della risposta al gradino di ampiezza pari al 50% del range di variazione (figure 6-6, 6-7, 6-8).
I tutti e tre i casi la risposta al gradino del modello insegue bene quella effettiva del sistema simulato. Possiamo, dunque, ritenere attendibili i modelli ottenuti.
Fig. 6-6 Validazione di Gv
Fig. 6-8 Validazione di Gx
6.3.4 Identificazione di As, Yin, Yx
In questo caso, avere una identificazione accurata è stato un po’ più laborioso. Sono state condotte prima le prove C e D che usano due ingressi diversi ma nello stesso range di variazione di 0.12V. In fase di validazione però non si sono ottenuti risultati soddisfacenti allora si e proceduto con la prova E abbassando il range a 0.12V.
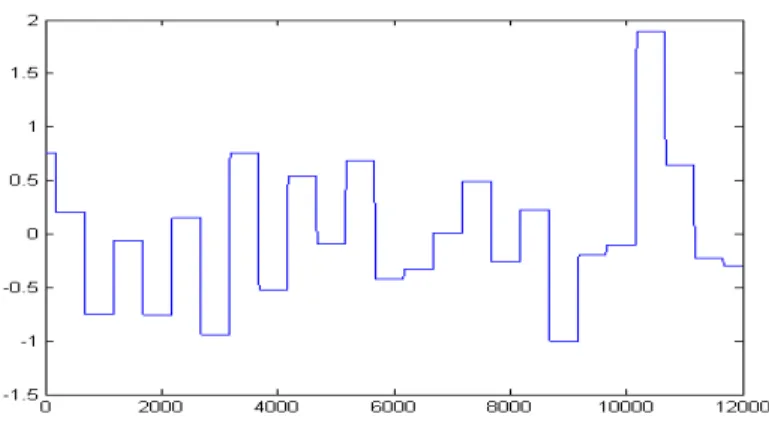
Le tabelle 6-3 e 6-4 e 6-5 riassumono i risultati prodotti dall’algoritmo di identificazione nei tre casi. Gli ingressi usati nelle tre prove sono riportati nelle figure 6-9 e 6-10 e 6-11
Fig. 6-9 Segnale di ingresso della prova C
Fig. 6-10 Segnale di ingresso della prova D
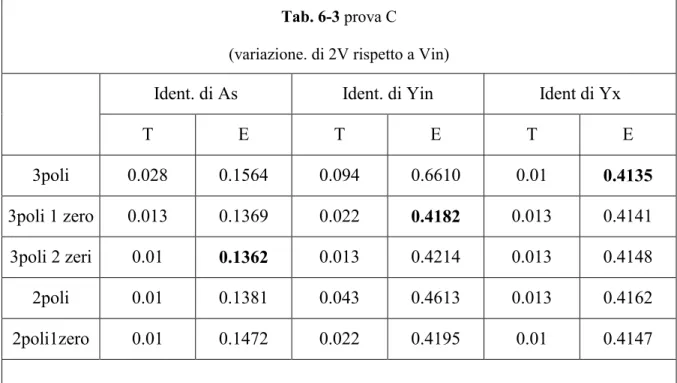
Tab. 6-3 prova C
(variazione. di 2V rispetto a Vin)
Ident. di As Ident. di Yin Ident di Yx
T E T E T E 3poli 0.028 0.1564 0.094 0.6610 0.01 0.4135 3poli 1 zero 0.013 0.1369 0.022 0.4182 0.013 0.4141 3poli 2 zeri 0.01 0.1362 0.013 0.4214 0.013 0.4148 2poli 0.01 0.1381 0.043 0.4613 0.013 0.4162 2poli1zero 0.01 0.1472 0.022 0.4195 0.01 0.4147 Tab. 6-4 prova D (variazione di 2V rispetto a Vin)
Ident. di As Ident. di Yin Ident di Yx
T E T E T E 3poli 0.031 0.3286 0.04 0.6347 0.013 0.4244 3poli 1 zero 0.013 0.1902 0.019 0.5844 0.019 0.4239 3poli 2 zeri 0.037 0.2088 0.019 0.4314 0.019 0.4257 2poli 0.01 0.1779 0.013 0.4731 0.01 0.4228 2poli1zero 0.01 0.1890 0.019 0.4304 0.01 0.4252
3poli 1 zero 0.016 0.1123 0.073 0.4079 0.019 0.3962
3poli 2 zeri 0016 0.1121 0.013 0.3960 0.019 0.3959
2poli 0.013 0.1120 0.046 0.4088 0.019 0.3973
2poli1zero 0.013 0.1107 0.037 0.3975 0.019 0.3969
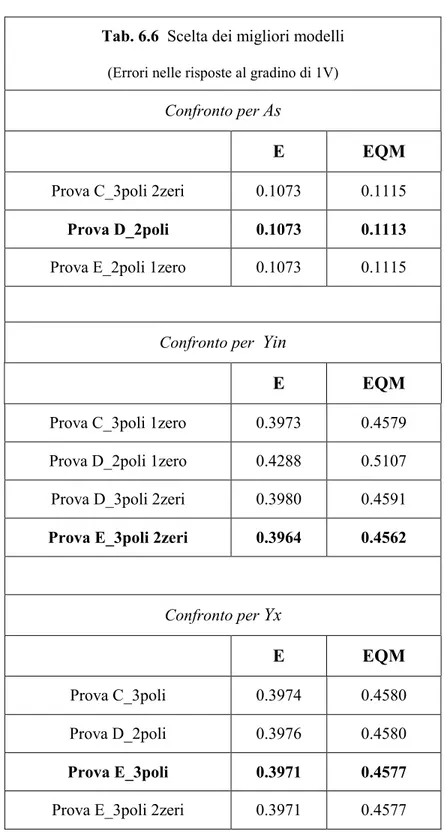
I risultati delle tre prove non possono essere confrontati in maniera diretta perché prodotti da ingressi diversi. La scelta dei modelli finali è stata condotta sottoponendo a validazione tutti i modelli migliori di ogni prova (valori in grassetto nelle tabelle 6-3, 6-4 e 6-5), valutando gli scostamenti tra modello e sistema in risposta ad un unico ingresso al gradino di ampiezza pari a 1V. La tabella 6-6 riporta gli indici di errore E ed EQM dei vari modelli confrontati. I modelli migliori sono quelli corrispondenti ai valori minimi degli indici di errore e sono evidenziati in grassetto in tabella 6-6. Naturalmente nel caso di As e Yx, a parità di errore, la scelta e ricaduta sui modelli più semplici. Notiamo anche i modelli cosi ottenuti sono coerenti, in termini di numero di poli e di zeri, con quelli individuati in fase di modellazione.
Tab. 6.6 Scelta dei migliori modelli
(Errori nelle risposte al gradino di 1V)
Confronto per As
E EQM
Prova C_3poli 2zeri 0.1073 0.1115
Prova D_2poli 0.1073 0.1113
Prova E_2poli 1zero 0.1073 0.1115
Confronto per Yin
E EQM
Prova C_3poli 1zero 0.3973 0.4579 Prova D_2poli 1zero 0.4288 0.5107 Prova D_3poli 2zeri 0.3980 0.4591
Prova E_3poli 2zeri 0.3964 0.4562
Confronto per Yx E EQM Prova C_3poli 0.3974 0.4580 Prova D_2poli 0.3976 0.4580 Prova E_3poli 0.3971 0.4577
1 003056 . 0 10 109 . 4 10 419 . 4 2 . 1 2 6 3 9 + ⋅ + + ⋅ − = − − s s s Yx Fig. 6-12 Diagrammi di As
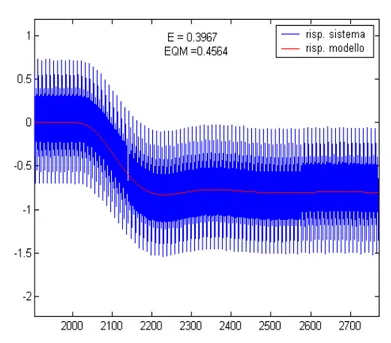
Fig. 6-15 Validazione di As
Fig. 6-17 Validazione di Yx
6.3.6 Identificazione di Zout e T
Tab. 6-7
Variazione di 1A sul carico Ig
Idemt. di Zout Ident. di T
T E T E 3poli 0.091 0.2591 0.016 0.3936 3poli 1 zero 0.013 0.1069 0.046 0.3936 3poli 2 zeri 0.019 0.1069 0.022 0.3936 2poli 0.076 0.1430 0.016 0.3936 2poli 1zero 0.013 0.1069 0.016 0.3936
I modelli identificati sono riportati nelle figure 6-19 e 6-20. La figura 6-18 riporta invece l’ingresso usato in questo caso.
Fig. 6-18 Ingresso usato per identificare Zout e T
1 0009339 . 0 10 764 . 1 836 . 0 00207 . 0 2 6 + + ⋅ − − = − s s s Zout 1 0009223 . 0 10 732 . 1 1 2 6 + + ⋅ = − s s T
Fig. 6-21 Validazione di Zout
6.4 Confronto tra modello “derivato” e modello “diretto”
Al fine di essere più chiari nell’esposizione, e favorire la distinzione tra il modello derivato da quelli dei singoli moduli convertitori (identificazione modulare), e quello ottenuto dalla identificazione diretta del sistema dei due convertitori in parallelo, sarà usato nel seguito il termine “derivato” per indicare il primo modello, e l’aggettivo “diretto” per riferire il secondo. Il confronto tra i due viene condotto sottoponendo a validazione entrambi i modelli, usando quale unico ingresso quello riportato in figura 6-11.
Fig 6-11 Ingresso usato per la validazione
I modelli in esame sono entrambi sistemi MIMO lineari, quindi possiamo confrontare direttamente gli elementi delle matrici di trasferimento del primo sistema con i corrispondenti elementi matriciali del secondo. Le figure seguenti illustrano tale confronto.
Fig 6-12 Confronto in frequenza tra Gv’ e Gv
Fig 6-13 Validazione di Gv’ e Gv con doppio gradino
Indici di errore relativi alla fig. 6-13
Modello E EQM
Gv (diretto) 0.1023 0.1064
Fig_6-14 Confronto in frequenza tra Gx’ e Gx
Fig 6-15 Validazione di Gx’ e Gx con doppio gradino
Indici di errore relativi alla fig. 6-15
Modello E EQM
Fig 6-16 Confronto in frequenza tra Gi’ e Gi
Fig. 6-17 Validazione di Gi’ e Gi con doppio gradino
Indici di errore relativi a fig 6-17
Modello E EQM
Gi (diretto) 0.3927 0.4532
Fig. 6-18 Confronto in frequenza tra As’ e As
Fig. 6.19 Validazione di As’e As con doppio gradino
Indici i errore reltivi alla fig.6-19
Modello E EQM
As (diretto) 0.1058 0.1136
Fig. 6-20 Confronto in frequenza tra Yin’ e Yin
Fig. 6-21 Validazione di Yin’ e Yin con doppio gradino
Indici di errore relativi a fig. 6-21
Modello E EQM
Yin (diretto) 0.3926 0.4530
Fig. 6-22 Confronto in frequenza tra Yx’ e Yx
Fig. 6-23 Validazione di Yx’ e Yx con doppio gradino
Indici di errore relativi a figura 6-23
Modello E EQM
Yx (diretto) 0.3927 0.4531
Fig.6.24 Confronto in frequenza tra Zout’ e Zout
Fig. 6-25 Validazione di Zout’ e Zout con doppio gradino
Indici di errore relativi a fig.6-25
Modello E EQM
Zout (diretto) 0.1050 0.1093
Fig. 6.26 Confronto tra T’ e T
Fig. 6.27 Validazione di T’ e T con doppio gradino
Indici di errore relativi a fig. 6-27
Modello E EQM
T (diretto) 0.3924 0.4516
frequenze). Anche Gx’ e Gx , differiscono solo per le alte frequenze (fig. 6-14). Gi’ e Gi presentano un leggero scostamento nel valore del guadagno statico. Lo stesso vale tra Yin’ e Yin e tra Zout’ e Zout’.
Per quanto riguarda il confronto mediante la validazione con doppio gradino si può concludere che in generale, i modelli derivati approssimano abbastanza bene il comportamento reale del sistema. Gli scostamenti nelle risposte sono più che accettabili nel guadagno in tensione controllo uscita, nel guadagno in corrente uscita ingresso e nell’audiosuscettibilità. Da notare il confronto sull’audiosuscettibilità, dove il modello derivato risulta addirittura migliore di quello diretto.
Le figure 6-15, 6-17, 6-19, 6-23 mostrano in modo evidente che per le restanti funzioni di trasferimento del modello derivato, (Gx’, Gi’, Yx’ Yin’), l’errore di validazione assume valori non trascurabili. Occorre a questo punto ricordare che le fdt in questione sono state ricavate mediate le seguenti formule:
2
' v xG
T
G
=
;2
' s xTA
Y
=
; ); 2 ( ' v i i G T G G = − ); 2 ( ' s in in TA Y Y = − (6-8)singolo convertitore boost in esame. Nelle espressioni di 6-8 gli errori di modello commessi identificando i parametri del singolo convertitore si ripercuotono sull’’errore del modello derivato, in maniera più critica a causa del prodotto tra T e Gv e tra T e As.
Risulta evidente dunque come la validità dell’identificazione modulare sia strettamente legata all’accuratezza con la quale vengono identificati i singoli moduli. Questo però non rappresenta un limite bensì il punto di forza di un approccio modulare: in un sistema complesso di più convertitori operanti in parallelo può essere, infatti , più semplice avere una buona stima sul modello del singolo modulo che non sul sistema complessivo.
In conclusione si può affermare che globalmente i risultati ottenuti dalla identificazione modulare sono apprezzabili. Pertanto tale tecnica risulta molto interessante e meritevole di approfondimenti futuri.