6
Verifica dei risultati sul banco prova
6.1
Introduzione
Inseriti i blocchi dei sistemi di controllo nel Sottosistema Autopiloti del FMS si procede alla simulazione del loro funzionamento sul banco prova: si colle-gano i modelli del Simulatore e del FMS e li si mettono in comuicazione, per mezzo della connessione descritta nel §2.3, col pannello della strumentazione e con quello dalla mappa per permettere l’aquisizione dei dati di ingresso e la visualizzazione delle uscite.
Per la descrizione generale dei pannelli strumentazione e mappa e del blocco joystick si veda [6].
Qui si vuole rappresentare un esempio di missione tipica che potrebbe es-sere richiesta all’UAV: salita in quota di crociera, avvicinamento al punto di osservazione attraverso waypoints, monitoraggio del territorio circostante, avvicinamento al punto di arrivo secondo una radiale selezionata, prova degli autopiloti IAS, heading e course.
La precedura di accensione del sistema autopiloti `e la seguente:
• Portare il joystick in gestione automatica premendo il relativo pulsante: ci`o permette al sistema di andare a leggere il valore dell’interruttore generale del sistema di autopiloti;
• Accendere l’interruttore generale nel pannello della strumentazione: con questa operazione si permette il passaggio delle variazioni dei co-mandi calcolate dal sistema di controllo, altrimenti si lasciano segnali
• Immettere il valore desiderato nell’apposito display dell’autopilota che si desidera utilizzare;
• Accendere l’interruttore del particolare autopilota: questa ultima ope-razione rende effettivamente attivo il calcolo delle variazioni dei coman-di.
6.2
Salita in quota
Terminata la manovra di decollo si richiede all’UAV di portarsi in quota di crociera salendo con una desiderata climb speed :
Quota di partenza 600 [m] 1968.5 [ft]
Quota di arrivo 1000 [m] 3281 [ft] Climb Speed di partenza
0 [ft/min] Climb Speed inserita
1000 [ft/min] IAS iniziale 73.9 [knots]
Si attua la procedura descritta nel §6.1 attivando gli autopilori della quota e della velocit`a verticale con i rispettivi valori.
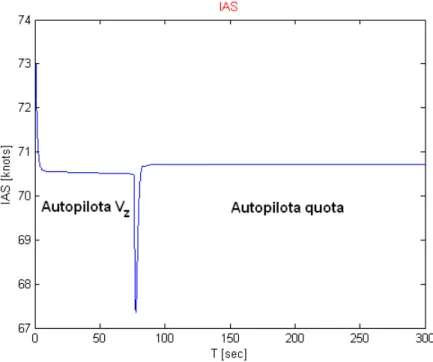
La Figura 6.1 mostra i risultati ottenuti: in effetti, sino ad una soglia rispetto al valore della quota di arrivo, il sistema controlla la velocit`a verticale per poi livellarsi alla quota di arrivo. Di seguito si mostra anche l’andamento della Vz.
Figura 6.1: Salita in quota di crociera
L’intervento dell’autothrottle permette di contenere la diminuzione di ve-locit`a, soprattutto nella prima fase della simulazione, quando `e attivo l’auto-pilota della velocit`a verticale: infatti, si richiede al velivolo di salire con ve-locit`a sostenuta, il che causerebbe una perdita di velocit`a molto pi`u marcata se non intervenisse l’aumento di spinta.
6.3
Navigazione per waypoints
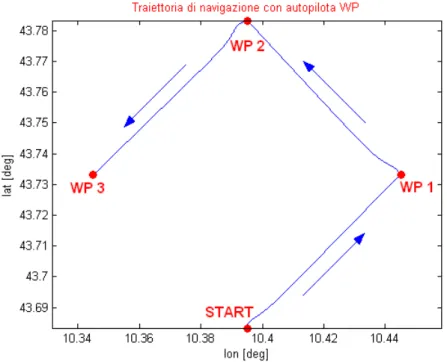
Si supponga ora di voler navigare verso un selezionato punto di arrivo at-traversando nel percorso dei waypoints intermedi: inoltre si desidera che lo spostamento sia a quota costante.
Si inserisce valore nullo nell’autopilota della velocit`a verticale e si immettono le coordinate dei waypoints negli appositi display del pannello mappa.
Punto A di partenza LAT A [deg] LON A [deg]
43.6833 10.395 Waypoint 1
LAT WP1 [deg] LON WP1 [deg] 43.7333 10.445
Waypoint 2
LAT WP2 [deg] LON WP2 [deg] 43.7833 10.395
Waypoint 3
LAT WP3 [deg] LON WP3 [deg] 43.7333 10.345
Climb Speed inserita 0 [ft/min] Quota di partenza
3281 [ft] IAS di partenza
96.08 [knots]
Figura 6.4: Navigazione per waypoints: traiettoria
Figura 6.6: Navigazione per waypoints: IAS
6.4
Manovra di circling
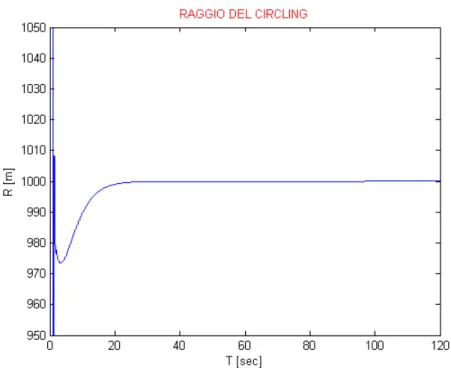
Arrivati sopra un ipotetico punto di osservazione, tramite navigazione simile a quella sopra mostrata, si decide di monitorare il territorio circostante per mezzo della manovra di circling e sempre mantenendo costante la quota: ad esempio si voglia descrivere una circonferenza di raggio pari a 1000 m.
Quota di partenza 1000 [m] 3281 [ft] Climb Speed di partenza
0 [ft/min] IAS di partenza
96.08 [knots]
Avviato il sistema seguendo la procedura sopra descitta si ottengono i risultati mostrati nelle successive Figure.
Il velivolo si immette nella traiettoria desiderata a partire da un moto rettili-neo verso Nord; portato a regime l’angolo di rollio anche il raggio di curvatura si assesta sul valore desiderato.
L’autopilota della velocit`a verticale contrasta la perdita di quota dovuta alla inclinazione delle ali e permette di ripristinare, dopo un transitorio, il valore iniziale; anche la IAS non subisce significative variazioni.
Figura 6.8: Circling: traiettoria
Figura 6.10: Circling: climb speed
Figura 6.12: Circling: IAS
6.5
Navigazione VOR
Terminata la fase di circling, l’esempio di missione prosegue con l’avvicina-mento al punto di arrivo tramite navigazione VOR.
Sul pannello della mappa si inseriscono le coordinate del punto desiderato ed il valore della radiale da intercettare; sul pannello della strumentazione si mette sempre valore nullo nel display della climb speed per mantenere la quota costante.
Le condizioni di inizio simulazione sono:
Quota di partenza 1000 [m] 3281 [ft] Climb Speed di partenza
0 [ft/min] IAS di partenza
96.08 [knots]
Si avvia il sistema sempre con la stessa procedura.
Ad esempio, si voglia seguire la seguente rotta:
Punto A di partenza LAT A [deg] LON A [deg]
43.683 10.395 Punto B di arrivo LAT B [deg] LON B [deg]
43.883 10.195 Radiale selezionata [deg]
La traiettoria risultante `e mostrata in Figura 6.14.
Arrivato in un intorno di C, il velivolo vira di 90◦ per dirigersi verso B
Figura 6.14: Navigazione VOR: traiettoria
Figura 6.15: Navigazione VOR: H
Figura 6.16: Navigazione VOR: IAS
L’autopilota della velocit`a verticale provvede al ripristino della quota in-iziale e secondariamente della IAS, grazie all’intervento dell autothrottle ad
6.6
Prova autopilota IAS
A partire dalla condizione di crociera si vuole ora simulare una diminuzione della velocit`a indicata.
L’esempio provato `e il seguente:
IAS iniziale 96.08 [knots]
IAS inserita 85 [knots] Climb Speed iniziale
0 [ft/min] Quota iniziale 1000 [m] 3281 [ft]
La velocit`a indicata `e controllata dall’equilibratore e scende rapidamente verso il valore di regime: ci`o causa il picco positivo di velocit`a verticale. Dopo questa prima fase si va a stabilizzare il rateo di salita: comincia la fase oscillatoria smorzata attorno ai due valori finali che si esaurisce con l’assestamento di entrambe le grandezze.
Gli andamenti della IAS e della velocit`a verticale sono riportati nelle Figure che seguono.
Figura 6.17: Autopilota IAS: IAS
6.7
Prova autopiloti heading e course
Infine si testano gli autopiloti dell’angolo di prua e di quello di rotta: in entrambi i casi si parte da rispettivi valori nulli e come per gli altri casi si attiva anche l’autopilota della climb speed per mantenere la quota.
Ad esempio, relativamente all’angolo di prua si richiede:
Angolo di prua iniziale 0 [deg]
Angolo di prua inserito 30 [deg]
Climb Speed inserita 0 [ft/min] Quota iniziale 1000 [m] 3281 [ft]
IAS di partenza 96.08 [knots]
I risultati indicano che il velivolo porta a termine la virata richiesta con suc-cesso: l’autopilota della velocit`a verticale riporta a zero il rateo di salita, mentre la IAS ritorna al suo valore iniziale dopo oscillazioni di modesta am-piezza.
Inoltre la virata risulta coordinata in quanto dopo un breve transitorio l’an-golo di derapata viene subito riportato a zero.
Figura 6.19: Autopilota heading: ψ
Figura 6.21: Autopilota heading: climb speed
Figura 6.23: Autopilota heading: H
A partire dalle stesse condizioni si richiede ora una variazione di angolo di rotta η pari a 30◦:
Angolo di rotta iniziale 0 [deg]
Angolo di rotta inserito 30 [deg]
Climb Speed inserita 0 [ft/min]
Anche in questo caso i risultati appaiono soddisfacenti; l’autopilota della climb speed riporta a zero il rateo di salita, la IAS ritorna al suo valore iniziale e l’angolo di derapata viene subito riportato a zero: le Figure che seguono mostrano gli andamenti delle grandezze sopra citate.
Figura 6.25: Autopilota course: β
Figura 6.27: Autopilota course: IAS