7
7
IL SISTEMA DI PROPULSIONE
7.1 Introduzione
Gli scopi del sistema di propulsione nell’ambito del sistema satellitare che è qui in via di determinazione sono, come possiamo dedurre dalle manovre descritte nel capitolo 4, molteplici:
• Possibilità di spostare il satellite su un’orbita di quota più alta, ovvero bassa, rispetto a quella nominale per produrre l’acquisizione dei tre piani a diverso RAAN in caso di malfunzionamento del lanciatore; • spostare il satellite da tali orbite all’orbita nominale;
• controbilanciare la variazione di semiasse dovuta a resistenza atmo-sferica;
• aiutare, eventualmente, il sistema di controllo d’assetto.
Numerosi sono i tipi di propulsore che possono essere montati su un satellite. I più utilizzati sono propulsori a gas freddo o chimici i primi si compongono di un gas in pressione e di una valvola che lo fa uscire in una direzione opportuna per crea-re spinta, i secondi utilizzano normalmente una miscela di combustibile ed ossidante allo stato solido (utilizzato principalmente nei razzi lanciatori), liquido (si parla in questo caso di sistemi criogenici, in quanto i gas vanno conservati a temperature molto vicine allo zero assoluto per mantenerle in questo stato) o gassoso per produrre spinta attraverso una reazione chimica che aumenta la pressione e quindi la velocità di eiezione. Una classe più limitata è quella dei propulsori nucleari in cui un elemen-to radioattivo riscalda un fluido operativo che viene così eiettaelemen-to. Altri tipi di propul-sori sono quelli elettrici che incominciano a trovare uno spazio sempre più largo nel-le applicazioni spaziali per il loro enel-levato impulso specifico che permette un conte-nimento della quantità del propellente aumentando al contempo la precisione del co-mando in quanto la spinta prodotta può risultare molto limitata. Il vantaggio
principa-le offerto dai motori eprincipa-lettrici è che, in termini di principio, la capacità di creare spinta non è limitata dai confini stretti della materia. Infatti in un sistema chimico la quanti-tà di energia aggiunta al flusso di propellente è uguale all’energia rilasciata dalla rea-zione chimica ed anche, come per i sistemi nucleari-termici, la temperatura del fluido di lavoro non può superare limiti imposti dai materiali di cui è composto il motore. In un propulsore elettrico, invece, il gas è freddo in modo da non creare stress termici, in più la forza elettrica è applicata direttamente alla massa di reazione, quindi siamo limitati teoricamente solo dalla capacità di applicare queste forza alla potenza totale desiderata. Fanno parte di una classe intermedia tra i propulsori elettrici e quelli chi-mici i motori elettroterchi-mici, resistogetti ed arcogetti, poiché lavorano in un modo molto simile ai propulsori chimici; in cui un fluido di lavoro viene riscaldato, ma an-che effetti elettrici, dal momento an-che questo riscaldamento è ottenuto, nei resistoget-ti, mediante contatto con superficie riscaldata per effetto Joule e, negli arcogetresistoget-ti, tra-mite formazione di un arco elettrico tra un catodo ed un anodo concentrici nella se-zione ristretta dell’ugello. I motori elettrici veri e propri, sfruttano invece un campo elettrico e/o magnetico per forzare delle particelle opportunamente caricate ad uscire dal motore con la velocità desiderata in modo da ottenere spinta. Sono motori elettri-ci i motori a Ioni (a griglia), per cui si parla di motore elettrostatico in quanto un campo elettrico viene applicato staticamente, non varia nel tempo, tra due elettrodi a griglia per accelerare ioni di Xenon (molto usati anche Hg e Ce) e permetterne la fuoriuscita in direzione opportuna, ed i motori colloidi e FEEP, anch’essi elettrosta-tici, in cui gocce molto fini, ottenute tramite passaggio in condotti di diametro nell’ordine dei micron, di un fluido caricato vengono espulse tramite l’azione di un forte campo elettrico, i motori elettromagnetici, in cui non viene applicato solo un campo elettrico, ma anche un campo magnetico, normalmente, ortogonale alla dire-zione della corrente per produrre spinta attraverso l’adire-zione di quella che viene defini-ta forza di Lorentz, di cui sono espressione i motori MPD a campo auto-indotto, i motori PPT, ferocemente non stazionari in cui il passaggio di corrente avviene in maniera intermittente, pulsata ad un’opportuna frequenza. Ed infine esiste la catego-ria dei motori ad effetto Hall, a cui fa riferimento la specifica del sistema satellitare in questione, categoria intermedia che viene posta alternativamente tra i motori elet-tromagnetici ed i motori elettrostatici. Oltre al propulsore vero e proprio il sottosi-stema è composto anche dalla PPU del motore, dal serbatoio del propellente, dalle valvole e dai condotti. Lo scopo di questo paragrafo è, come al solito, di creare un’idea più o meno approfondita delle masse e delle prestazioni legate questi com-ponenti.
7.2 Propulsori ad effetto Hall
7.2.1 Introduzione
I motori HET, come è chiaro dal nome, si basano su quello che è chiamato ef-fetto Hall. I campi magnetici applicati incrementano le forze elettromagnetiche nel plasma, ma, anche, forzano la corrente a fluire in traiettorie a spirale aumentando il voltaggio totale relativo alla caduta all’elettrodo. Questo effetto è particolarmente e-vidente nei propulsori elettromagnetici con basse densità di particelle ed, in occiden-te, è sempre stato visto come un problema, in particolar modo per la realizzazione di motori MPD, in quanto produce una diminuzione nell’efficienza complessiva, dacché porta l’elettrone a muoversi in una direzione non voluta, e notevole è stato lo sforzo prodotto nel tentativo di eliminarlo; in Russia, invece, è stato sfruttato per produrre propulsori speciali, alternativi agli MPD, che producono spinta assecondandolo. I motori ad effetto Hall possono essere accostati ai motori a ioni, ma senza griglie, in quanto producono spinta tramite l’accelerazione elettrostatica di un plasma di ioni al di fuori da una camera anulare. Un confronto tra HET ed IT non è comunque appli-cabile in quanto i propulsori a Ioni operano ad impulso specifico abbastanza superio-re rispetto ai propulsori ad effetto Hall; un impulso inferiosuperio-re a 2500 sec., per questo tipo di motore, porterebbe ad una penalizzazione sulla massa e sulle performance. Da un altro lato il sistema HET produce un rapporto spinta-peso circa il 30% maggiore ed ha, quindi, peso minore, sebbene sia una grande sfida riuscire a portarli ad operare ad impulsi specifici superiori ai 2500 sec.
Più di cento propulsori SPT hanno volato in vari satelliti Sovietici, prima, e Russi, poi. I primi due, propulsori SPT-60, nel 1971 ed altri due nel 1974 sui satelliti Meteor, sostituiti da quattro SPT-50, nel 1976. Sessanta SPT-70 hanno volato nelle missioni Kosmos e Luch tra il 1986 ed il 1994 e trentadue SPT-100 sono stati imbar-cati nelle serie di satelliti russi per telecomunicazioni Gals e Express per ottenere North-South station keeping che sono state lanciate nel 1994-1996. Nessun problema o anomalia è mai stata riportata. I principali produttori sono la Fakel - Факэл, il Cen-tro di Ricerca Keldish - Научний Центр имени Келдыша, e l’istituto centrale di ri-cerca per la costruzione di macchine, TsNIIMASH - ЦНИИМАШ,tutti Russi.
Un grande sforzo è stato prodotto negli ultimi anni da molte compagnie occi-dentali, europee, giapponesi e statunitensi, per esplorare le potenziali applicazioni di questo tipo di propulsori, sia per quanto riguarda la commercializzazione dei propul-sori russi esistenti sia nel tentativo di produrne di propri.
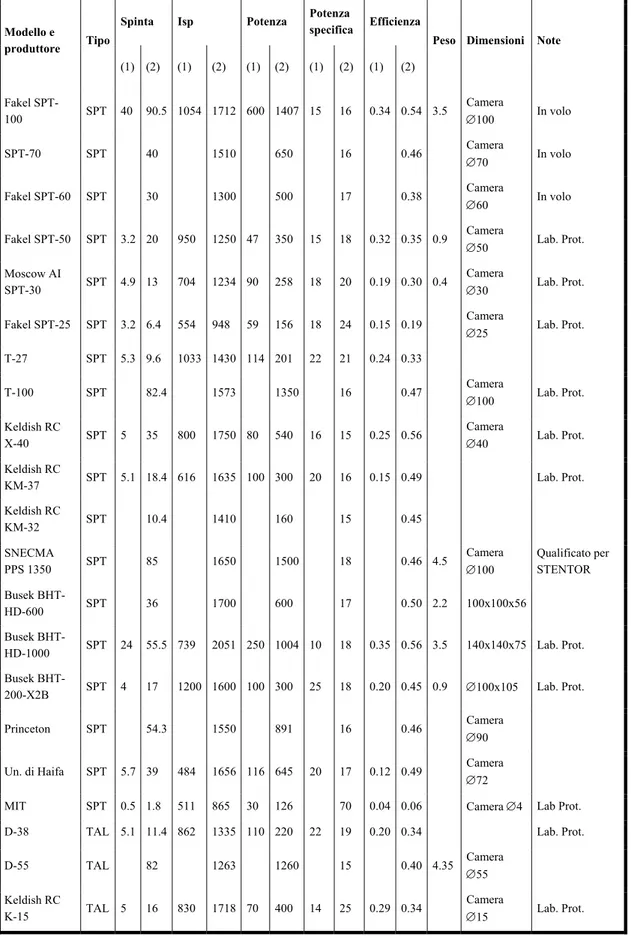
In tabella 5.1, riportata da [18], sono riportati alcuni dei propulsori attualmen-te in uso od in fase di sviluppo nel mondo con le rispettive caratattualmen-teristiche.
tabella 7.2-1 Tabella comparativa dei vari tipi di propulsore
Spinta Isp Potenza Potenza
specifica Efficienza Modello e
produttore Tipo
(1) (2) (1) (2) (1) (2) (1) (2) (1) (2)
Peso Dimensioni Note
Fakel SPT-100 SPT 40 90.5 1054 1712 600 1407 15 16 0.34 0.54 3.5 Camera ∅100 In volo SPT-70 SPT 40 1510 650 16 0.46 Camera ∅70 In volo Fakel SPT-60 SPT 30 1300 500 17 0.38 Camera ∅60 In volo Fakel SPT-50 SPT 3.2 20 950 1250 47 350 15 18 0.32 0.35 0.9 Camera ∅50 Lab. Prot. Moscow AI SPT-30 SPT 4.9 13 704 1234 90 258 18 20 0.19 0.30 0.4 Camera ∅30 Lab. Prot. Fakel SPT-25 SPT 3.2 6.4 554 948 59 156 18 24 0.15 0.19 Camera ∅25 Lab. Prot. T-27 SPT 5.3 9.6 1033 1430 114 201 22 21 0.24 0.33 T-100 SPT 82.4 1573 1350 16 0.47 Camera ∅100 Lab. Prot. Keldish RC X-40 SPT 5 35 800 1750 80 540 16 15 0.25 0.56 Camera ∅40 Lab. Prot. Keldish RC KM-37 SPT 5.1 18.4 616 1635 100 300 20 16 0.15 0.49 Lab. Prot. Keldish RC KM-32 SPT 10.4 1410 160 15 0.45 SNECMA PPS 1350 SPT 85 1650 1500 18 0.46 4.5 Camera ∅100 Qualificato per STENTOR Busek BHT-HD-600 SPT 36 1700 600 17 0.50 2.2 100x100x56 Busek BHT-HD-1000 SPT 24 55.5 739 2051 250 1004 10 18 0.35 0.56 3.5 140x140x75 Lab. Prot. Busek BHT-200-X2B SPT 4 17 1200 1600 100 300 25 18 0.20 0.45 0.9 ∅100x105 Lab. Prot. Princeton SPT 54.3 1550 891 16 0.46 Camera ∅90 Un. di Haifa SPT 5.7 39 484 1656 116 645 20 17 0.12 0.49 Camera
∅72
MIT SPT 0.5 1.8 511 865 30 126 70 0.04 0.06 Camera ∅4 Lab Prot. D-38 TAL 5.1 11.4 862 1335 110 220 22 19 0.20 0.34 Lab. Prot. D-55 TAL 82 1263 1260 15 0.40 4.35 Camera ∅55 Keldish RC K-15 TAL 5 16 830 1718 70 400 14 25 0.29 0.34 Camera ∅15 Lab. Prot.
7.2.2 Principi generali di funzionamento
Due sono i tipi di motori HET sviluppati: il motore a plasma stazionario (SPT) ed il motore con anodo a strato (TAL).
figura 7.2.1 Schema di un propulsore ad effetto Hall
Nei propulsori SPT, di cui è riportato uno schema costruttivo in figura 7.2.1, gli elettroni, prodotti dal catodo, sono obbligati, dal campo magnetico ortogonale e dal campo elettrico, a muoversi su una traiettoria elicoidale all’interno della camera anulare di scarica. In questo modo si hanno due effetti principali: essi ionizzano il propellente in arrivo tramite bombardamento elettronico e sostengono il campo elet-trico locale. Gli ioni prodotti non subiscono effetti dal campo magnetico e vengono accelerati solo dal campo elettrico producendo in questo modo spinta. Elettroni addi-zionali emessi dal catodo provvedono alla neutralizzazione del flusso.
I TAL si differenziano dagli SPT in quanto il campo elettrico prodotto dall’impedenza del campo magnetico è stabilito in uno strato sottile direttamente di fronte, ed esternamente, all’anodo, riducendo i fenomeni erosivi. Nella seguenti figu-re sono riportati le immagini dei due tipi di propulsofigu-re.
figura 7.2.2 Propulsore SPT, Keldish RC KM-37
figura 7.2.3 Propulsore TAL, TsNIIMASH D-100
7.2.3 Propulsore di ottimo
Per quanto riguarda la scelta del propulsore migliore da impiantare a bordo della classe di satelliti che qui discutiamo si possono scegliere due strade. La prima strada è quella di utilizzare un propulsore esistente, nel qual caso il propulsore po-trebbe essere sovra dimensionato, ma mai sotto dimensionato, rispetto alle reali esi-genze della piattaforma; la seconda è quella di cercare di produrre un propulsore che si accosti in pieno alle richieste del sistema.
7.2.4 Propulsore esistente
La prima richiesta che ci viene fornita per la scelta del propulsore riguarda la spinta massima prodotta. Osservando la tabella 4.5 si evince che la resistenza massi-ma si ha nelle condizioni delle orbite di parcheggio per separazione dei piani e risulta essere a parità di coefficiente balistico (180 kg/m2) 9.47 mN o 13.10 mN a seconda che si voglia effettuare la manovra in più o meno tempo.
Durante l’orbita nominale la resistenza cade a circa 2.94 mN, per il solito co-efficiente balistico. Una diminuzione si ha anche nell’orbita di parcheggio percorsa per separare i piani nella direzione opposta. Si potrebbe obiettare che i satelliti che non percorrono le orbite di parcheggio più basse non necessitano di un propulsore così potente, ma l’ipotesi di sviluppare una piattaforma in cui i satelliti formanti la costellazione siano in tutto e per tutto uguali è compatibile con una precisa volontà di limitazione dei costi, sia di progettazione sia di produzione.
Dai dati in nostro possesso possiamo già scremare i propulsori presentati in tabella 5.1, cancellando i propulsori che alla massima potenza nominale non riescono a raggiungere questi limiti. Oltre ai propulsori con spinte troppo elevate vanno elimi-nati dalle possibili scelte i propulsori a spinta minima troppo superiore alla minima spinta richiesta dall’orbita, in quanto non è conveniente un utilizzo di propulsori
troppo sovradimensionati, data la necessità di una quantità di potenza elettrica rile-vante, peso maggiore ed in più una serie di problemi a cascata su tutti gli altri sottosi-stemi. Oltre alla spinta, allora, limitante è la potenza elettrica massima assorbita. Un buon valore potrebbe essere nell’ordine dei 350 400 W, in quanto non è lecito aspet-tarsi di dotare il satellite di un sistema di generazione di potenza in grado di produrre più di 0.9 - 1 kW; l’assegnare il 35 - 40% della potenza al sistema di propulsione è già un valore molto elevato.
Tra i propulsori che rientrano all’interno di queste caratteristiche bisogna ri-cercare quello di massima efficienza complessiva in modo da minimizzare la potenza non utilizzata per produrre spinta, ma che viene sprecata in irraggiamento e riscal-damento dell’oggetto.
Il propulsore esistente migliore risulta essere quello prodotto da Keldish RC denominato KM-37. Nella tabella 7.2-2 sono riportate le caratteristiche fondamentali di funzionamento di questo tipo di motore ottenute dal sito internet della società stes-sa [19].
tabella 7.2-2 Caratteristiche del propulsore Keldish RC KM-37
Potenza utilizzata [W] Voltaggio di scarica [V] Corrente di scarica [mA] Flusso all’anodo [mg/sec] Spinta [mN] Efficienza % Impulso specifico [sec] 100 192 450 0.6 5.7 24.4 895 150 236 550 0.7 8.7 33.9 1180 200 270 670 0.8 11.7 40.3 1405 250 270 860 1.0 15.4 45.1 1500 300 292 970 1.1 18.5 49.6 1640
Vita massima prevista in funzionamento 1500 – 2000 ore
Questo propulsore non dovrebbe essere fatto funzionare al di sotto dei 200 W, in modo da consumare una minor potenza, mantenendo, al contempo, una spinta suf-ficientemente maggiore della spinta necessaria, in maniera da abbassare i tempi di accensione, un impulso specifico ed un’efficienza abbastanza elevati, in maniera da ridurre il consumo di propellente e la dissipazione di energia. In alcune occasioni, come per esempio durante le orbite di separazione dei piani orbitali o in condizioni di emergenza, o per manovre speciali al momento non considerate, può essere fatto funzionare al massimo della potenza in modo da produrre la massima spinta.
La casa produttrice non fornisce dati sul peso di questo propulsore, bisogna, allora, riferirsi a dati relativi ai propulsori esistenti. Sistemi esistenti a bassa potenza riducono il rapporto massa potenza a circa 3 kg/kW; utilizzando un valore cautelati-vo di 3.5 kg per stimare il peso del propulsore, come viene suggerito in [18], arri-viamo ad una stima del peso del propulsore KM-37 di 1.05 kg.
7.2.5 Propulsore nuovo
Lo sviluppo di un propulsore nuovo di ottimo per la missione specifica del sa-tellite in esame non è, visti i risultati presentati nel precedente paragrafo, una necessi-tà, in quanto il propulsore KM-37 prodotto dal centro di ricerca Keldish risulta abba-stanza ben adattato, ma è comunque auspicabile per un miglioramento della piatta-forma, anche in versioni successive. Per il dimensionamento delle prestazioni fon-damentali di un propulsore nuovo, adattato al satellite, a questo livello, ci possiamo basare soltanto su leggi basate su best-fitting di valori sperimentali relativi ai propul-sori esistenti, che possono essere trovati in [18].
Per il calcolo della potenza specifica per unità di spinta la formula utilizzata risulta essere 103 . 0 74 . 33 ⋅ − = = P T P SpPow 7.2-1 con P la potenza in W che vogliamo fornire al propulsore e T la spinta in nM.
Nel caso in analisi, cercando spinte limite di 4 e 14 mN, si ottiene che la po-tenza da fornire al propulsore risulterà essere tra 85 e 270 W.
L’impulso specifico può essere espresso da 15 . 0 576 P Isp = ⋅ 7.2-2 ottenendo valori compresi tra 1120 e 1330 sec.
E’ possibile dimensionare anche il volume attraverso la legge P
V= 661. ⋅ ,
7.2-3 che lo fornisce in cm3, ottenendo un valore di circa 448 cm3. Per il peso si procede come nel caso precedente ottenendo un valore di 0.95 kg.
Questo propulsore di cui qui facilmente è stato possibile ricavare le grandezze fondamentali, risulta molto più scarso del propulsore già esistente, ma questo fatto è dato dalla forte approssimazione delle leggi utilizzate. Sicuramente attraverso uno studio più approfondito si arriverebbe a risultati più confortanti in una zona di poten-ze attorno ai 200 W.
7.2.6 Tempi di accensione
Il calcolo dei tempi di accensione è necessario per capire quanto tempo dev’essere dedicato alla manovra del propulsore e per controllare che questo sia suf-ficientemente inferiore al valore limite di vita presentato dal costruttore.
Il tempo di accensione, espresso in sec, viene calcolato attraverso la formula
F I
t tot
b =
7.2-4 con Itot l’impulso totale misurato in N·sec ed F la spinta effettiva in N.
La spinta effettiva può essere, invece, calcolata come la spinta prodotta dal propulsore, T, a cui viene sottratta la resistenza atmosferica incontrata, R.
R T F= −
7.2-5 L’impulso totale è espresso da
− ⋅ ⋅ ∆ = ⋅ =
∫
MR MR M v dt F Itot sat 1 log 1 7.2-6 con ∆v l’incremento di velocità necessario alla manovra, calcolato come nel proce-dimento illustrato nel paragrafo 4.2.7 con la differenza che colà il calcolo era effet-tuato per rivoluzione, qui invece si lascia cadere il satellite da una rivoluzione ad un numero di rivoluzioni pari a quelle giornaliere, Msat la massa iniziale del satellite edMR il rapporto di massa tra la massa finale e la massa iniziale espresso in 4.2-10. Le variabili da analizzare sono le condizioni di operatività del propulsore, in relazione alla spinta ed all’impulso specifico, il numero di manovre effettuate gior-nalmente, in riferimento all’incremento di velocità necessario per la manovra neces-saria a ritornare nelle condizioni nominali di orbita, ed il tipo di orbita, quindi la resi-stenza, avendo altresì fissato la massa del satellite al valore di 400 kg. Per quanto ri-guarda il propulsore imbarcato possiamo supporre che sia quello sopradetto, KM-37, operante nelle condizioni definite come nominali, potenza assorbita 200 W, impulso specifico 1405 sec, spinta 11.7 mN, e nelle condizioni definite di emergenza, potenza assorbita 300 W, impulso specifico 1640 sec, spinta 18.7 mN. L’orbita analizzata è quella nominale, prese con la massima resistenza. Per quanto riguarda il numero di
manovre possiamo scegliere in una gamma che va dalla manovra per ogni orbita, al caso di unica manovra giornaliera.
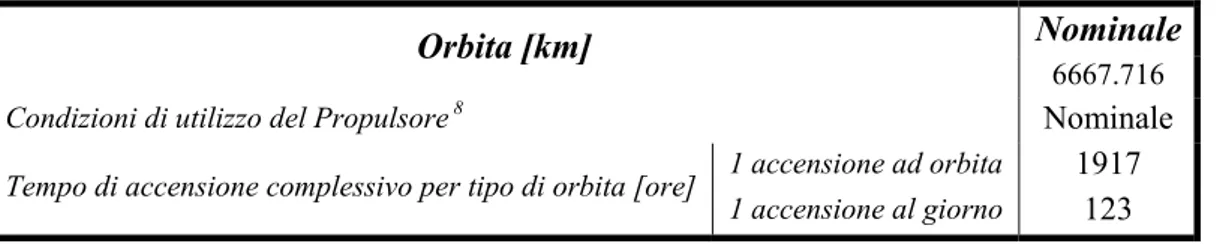
I risultati sono presentati in tabella 7.2-3 ed in figura 7.2.4. Possiamo notare che il tempo massimo di accensione si ottiene nella manovra ripetuta su ogni orbita, con dei valori che sono solo leggermente inferiori al limite massimo imposto dal co-struttore. E’ sufficiente imporre un controllo in media ogni due orbite per avere un tempo di accensione del propulsore circa la metà di quello massimo. Questo perché si dimezza il numero delle accensioni e leggermente si aumenta il tempo per cui il propulsore è in funzione, ma non si raddoppia.
tabella 7.2-3 Tempi di accensione del propulsore
Nominale Orbita [km]
6667.716
Condizioni di utilizzo del Propulsore 8 Nominale
1 accensione ad orbita 1917
Tempo di accensione complessivo per tipo di orbita [ore]
1 accensione al giorno 123
7.2.7 PPU
Per quanto riguarda la PPU nessuna indicazione è, ancora una volta, fornita dal costruttore, per un dimensionamento approssimato del volume occupato e della massa occorre rifarci ai dati sperimentali, [18], da cui si ottiene che la PPU ha un pe-so di 4 kg per ogni kW distribuito ed un volume di 1.67 dm3 per ogni kg. Per quanto riguarda il nostro caso, dacché la potenza massima distribuita è 300 W, possiamo supporre il peso della PPU in 1.2 kg, quindi approssimare il volume a circa 2 dm3.
figura 7.2.4 Tempo di accensione del propulsore per effettuare la correzione di quota dovuta a caduta per resistenza atmosferica in funzione del numero di rivoluzioni
com-piute dal satellite prima di effettuare tale manovra
7.2.8 Sottosistema di stivaggio e distribuzione
Il propellente utilizzato dal propulsore è lo Xenon, gas che non può assoluta-mente essere trattato come un gas reale e che ha una variazione di proprietà abba-stanza elevata con la temperatura. Imponendo una temperatura del serbatoio intorno ai 25 °C possiamo utilizzare l’equazione di van der Waals
2 V n a b n V nRT P − ⋅ ⋅ − = 7.2-7 essendo a tale temperatura i parametri: a pari a 4.194 atm·dm6/moli2 e b uguale a 5.105·10-2 dm3/moli; avendo indicato con n il numero delle moli.
Il peso complessivo di Xe da imbarcare risulta essere 13.1 kg utilizzando il procedimento illustrato nei paragrafi 4.2.7 e 4.2.8, con un Isp pari a 1405 sec, un de-orbitamento con accensione del propulsore di 50 km ed un margine pari al 10% del risultato.
Imponendo una pressione di contenimento di 15 Mpa, ovvero circa 151.5 atm, otteniamo che il serbatoio, per contenere 100 moli di Xe, a seguito del fatto che il peso molare è 131.3 gr a mole, deve essere grande circa 8.4 litri, o meglio 8.4 dm3. La forma migliore dal punto di vista delle tensioni interne è quella sferica che porta il serbatoio ad avere un raggio di 12.6 cm.
In questa situazione è facile calcolare le tensioni interne per ottenere lo spes-sore minimo delle pareti e quindi il peso minimo utilizzando le formule qui riportate
w s b r m =4⋅π⋅ 2⋅δ ⋅ρ 7.2-8 w s r p σ δ ⋅ ⋅ = 2 7.2-9
in cui r è il raggio della sfera, δs è lo spessore minimo, e p la pressione di
conteni-mento; ipotizzando il serbatoio costruito interamente in Titanio, con tensione massi-ma ammissibile,σw, di 1.23 Gpa e densità, ρw, 4460 kg/m3, soluzione abbastanza
se-guita commercialmente, otteniamo che il peso minimo del serbatoio dev’essere 0.68 kg. Se invece venissero seguite le indicazione dei dati dei sistemi attualmente sul mercato ci indicherebbero un valore minimo di peso, rispetto al peso di carburante presente all’interno, al 9.4%, ed un valore medio, conservativo, del 20%, che nel no-stro caso si tradurrebbero in 1.2 e 2.6 kg.
Per quanto riguarda il sottosistema di distribuzione, comprensivo di condotti, valvole e controllori di flusso, possiamo assumere, seguendo ancora una volta la li-nea dei dati storici [18], un peso di circa 0.3 kg ed un volume di 500 cm3.
7.3 Risultati
I risultati sono espressi qui di seguito dalle due tabelle riassuntive 7.3-1 e 7.3-2. tabella 7.3-1 Riassunto risultati componenti sistema propulsivo
Massa [kg] Potenza [W] Note
Propulsore 1.05 200 (300) KM-37 Keldish RC
PPU 1.2 15 Dati Storici
Serbatoio 0.7 0 Sferico in Ti
Condotti, Valvole e Linee 0.3 15 Dati storici
tabella 7.3-2 Vantaggi e Svantaggi delle soluzioni scelte
Scelta effettuata Vantaggi Svantaggi
Propulsore KM-37 Kel-dish RC
• Medio/Bassa potenza. • Elevato rendimento. • Elevato impulso specifico. • Alta spinta.
Serbatoio sferico in Ti Basso Peso Peggiore occupazione volume-trica rispetto forma cilindrica