81
5. Validazione
5.1 Introduzione
Al fine di validare il simulatore VM-Orbit sono state effettuate, durante il suo sviluppo, numerose prove: tra esse sono state selezionate due tipi. La prima riguarda la simulazione del sottosistema di potenza elettrica prendendo come riferimento una missione per osservazione della Terra già operativa; mentre la seconda prova permette di discutere sulla fattibilità di un trasferimento orbitale eseguito secondo la strategia riportata su un articolo del Kechichian (Kechichian 1997).
5.2 Prova 1
5.2.1 Descrizione della prova
Una delle scelte che un sistemista spaziale deve affrontare è quella del dimensionamento e posizionamento dei pannelli solari sul satellite, o sul veicolo spaziale in genere. L’installazione dei pannelli solari deve essere compatibile con la missione per cui lo S/C è concepito, ovvero deve essere tale da garantire una quantità minima di energia elettrica disponibile per la sopravvivenza dello S/C in ogni istante della missione, sia essa utilizzata direttamente per alimentare i singoli sottosistemi o sia essa utilizzata per ricaricare la batteria.
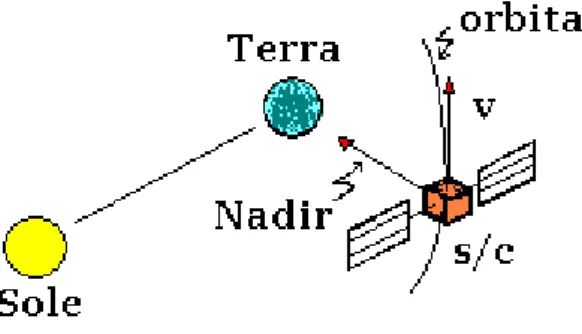
La prova simulata è una missione su orbita polare sul modello della missione del satellite Envisat. Il satellite fu lanciato il 1 marzo 2002 sul lanciatore Ariane 5 dalla base di Kourou, Guiana Francese. La missione prevede osservazione continua della Terra monitorando la superficie, l’atmosfera, gli oceani e le calotte glaciali. L’orbita del satellite Envisat è una orbita eliosincrona quasi-polare con periodo di 101minuti. Il satellite è
durante le ore di sole e 3kW durante i periodi di eclissi di cui 1.9kW richiesti dagli strumenti (payload). Il pannello solare è puntato verso il sole usando meccanismo di guida. La prova eseguita non riproduce esattamente la missione Envisat per l’evidente difficoltà che una tale simulazione comporta e per l’assenza di dati. La prova è suddivisa in due parti:
1. Verificare che il simulatore riproduce il modello di simulazione del sottosistema di potenza implementato in esso;
2. Dimostrare che una gestione dei sottosistemi è necessaria per poter rendere fattibile una missione di tal genere.
5.2.2 Ipotesi e dati relativi alla parte 1 della prova 1
La fase di verifica del modello consiste nel simulare una missione su orbita polare e il simulatore VM-Orbit permetterà il confronto tra diverse configurazioni di pannelli solari, differenti tra loro per la diversa direzione del versore normale alla superficie del pannello solare,
nˆ
; quindi per ogni configurazione è stata eseguita una simulazione. I 3 casi (indicati con C1, C2, C3) simulati sono:C1:
nˆ
diretto lungo il vettore velocità83
C2:
nˆ
diretto lungo la direzione del nadirFigura 5-2 : versore normale al pannello solare diretto lungo il Nadir
C3:
nˆ
diretto lungo la direzione uscente dal piano orbitaleFigura 5-3 : versore normale al pannello solare uscente dal piano orbitale
Come visto nei precedenti capitoli, per simulare una missione, è necessario inizializzare un vettore contenente informazioni relative alla strategia di sparo, orbita iniziale e caratteristiche dei sottosistemi presenti a bordo. Per rendere i 3 casi confrontabili sono state effettuate alcune scelte, di seguito elencate:
I 3 casi simulati differiscono solo per la direzione del versore normale ai pannelli solari
nˆ
;Assenza di strategia di sparo;
= 7278 ; = 90°;
= 0°; = 10.17°; = 0°
Il valore di fa si che il piano orbitale sia ortogonale alla direzione congiungente Terra – Sole ( ) per la data di inizio simulazione;
Tra le possibili orbite polari è stata scelta l’orbita alba-crepuscolo (o 6-18) in quanto non si presentano fasi di eclissi; quindi il sottosistema di immagazzinamento di energia elettrica non influisce sui risultati delle missioni simulate;
Data di inizio simulazione: 01.01.2007 ore 00:00;
Data di fine simulazione: 02.01.2007 ore 00:00. La durata della simulazione, pari a 1 giorno solare, è abbastanza grande per ottenere un numero sufficiente alto di orbite per poter studiare il comportamento del sottosistema all’interno del singolo caso. Il numero alto di orbite è conseguenza della scelta di una orbita LEO per la missione in esame. Allo stesso tempo la durata della simulazione è abbastanza piccola per poter trascurare l’effetto della non sfericità della Terra, ovvero si trascura la rotazione della congiungente Terra-Sole di meno di 1° rispetto alla direzione iniziale;
Effetti perturbativi tutti nulli, compreso per quanto appena detto;
Considerando la durata della missione simulata, è stato trascurato l’effetto della degradazione dei pannelli;
Superficie dei pannelli solari costante per tutti e 3 i casi.
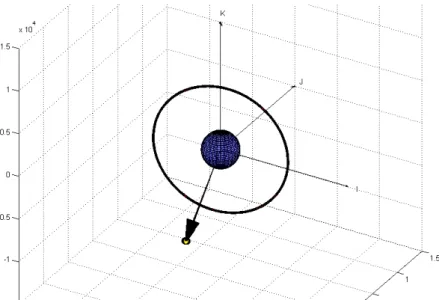
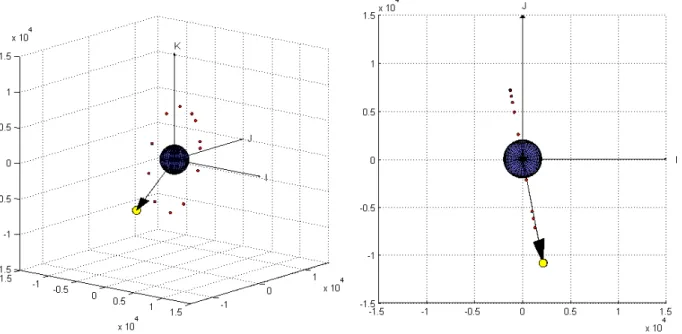
L’orbita simulata e visualizzata per 3 diverse angolazioni, identica per tutti e tre i casi, è riportata in Figura 5-4 e Figura 5-5.
85
Figura 5-4 : orbita prova 1 per verifica del modello (vista 3D)
Figura 5-5 : orbita prova 1 per verifica del modello (vista piano x-z e y-z)
5.2.2.1 Risultati attesi
La potenza elettrica generata da un pannello solare è funzione dell’angolo tra la direzione della radiazione solare incidente sul pannello e la normale nˆ
=
( )
5.1Le Figura 5-1, Figura 5-2 e Figura 5-3 mostrano la disposizione dei pannelli solari per i 3 casi in esame; da esse si evince che nei primi due casi, il versore è ortogonale (o quasi) a ; mentre nel terzo caso le direzioni sono quasi parallele a parte l’angolo tra la direzione ed il piano equatoriale dovuto alla posizione del Sole sull’eclittica: nel terzo caso il valore di potenza elettrica generata dovrebbe essere prossimo al valore massimo. Il tipo di orbita scelta è tale da mantenere le direzioni pressoché costanti durante il periodo simulato, per cui il valore di potenza massimo ottenuto sarà uguale per tutte le orbite.
5.2.2.2 Conclusioni parte 1 prova 1
Dal confronto dei grafici, discussi e riportati in App.B, ottenuti dalla simulazione dei 3 casi di missione differenti solo per la diversa disposizione dei pannelli solari, si evince che la scelta ottimale per ottenere un livello alto (prossimo al valore massimo per l’orbita scelta e per i parametri inseriti) di potenza elettrica generata è quella che consiste nel posizionare i pannelli solari rivolti verso il sole, ovvero con il versore nˆ uscente dal piano orbitale, in accordo con i risultati attesi.
5.2.3 Ipotesi e dati relativi alla parte 2 della prova
La parte 2 della prova consiste nel simulare un missione di osservazione del pianeta Terra utilizzando alcune caratteristiche della missione Envisat. E’ utile quindi evidenziare le analogie e le differenze tra le due missioni:
In fase di inserimento dati, il valore di superficie dei pannelli solari inserito è tale da generare una potenza di quasi 6kW teorici quando il pannello è esattamente puntato verso il sole;
la potenza richiesta dal satellite di prova è costante a tratti: o 1000W per le funzioni di bordo e propulsori spenti;
87
si suppone che il satellite di prova debba osservare solo le zone polari: gli strumenti per l’osservazione della Terra vengano attivati o disattivati quando il satellite attraversa il circolo polare artico o antartico;
il satellite di prova dispone di pannello solare fisso e orientato lungo una delle direzione tra velocità, nadir o uscente dal piano orbitale a differenza del pannello solare di cui è dotato Envisat che “segue” il Sole durante il suo moto sull’orbita.
Una considerazione sul tipo di orbita è necessaria. L’orbita del satellite Envisat è una orbita elio-sincrona, ma il periodo simulato è poco più grande del periodo orbitale, per cui la rotazione della Terra intorno al Sole è trascurabile; segue che:
1. l’effetto della perturbazione dovuta a è trascurabile;
2. è possibile scegliere una inclinazione esattamente uguale a 90°;
3. non essendo disponibile il tipo di orbita elio-sincrona della missione Envisat, sono state simulate le orbite alba-crepuscolo e mezzogiorno-mezzanotte in quanto presentano casi limiti di illuminazione. L’orbita alba-crepuscolo (anche nota come 6-18) non presenta eclissi, mentre l’orbita mezzogiorno-mezzanotte (anche nota come 12-24) sperimenta l’eclissi per quasi un terzo del suo periodo orbitale.
Parametri orbitali della missione di prova: = 0; = 7278 ; = 90°; = 0°; = 10.17° caso orbita 6-18; = 100.17° caso orbita 12-24; = 0°.
Osservazione: i parametri orbitali inseriti sono tali che il satellite al tempo 0 si trovi sul piano equatoriale e che la variazione di anomalia vera coincida con la variazione di latitudine. Quindi la gestione degli strumenti per osservazione della Terra si traduce nell’imporre una condizione sulla anomalia vera. La latitudine del circolo polare artico e antartico è 66°33’38’’N e S rispettivamente; tale valore è stato arrotondato a 70° nella simulazione effettuata.
5.2.4
Risultati della simulazione
Considerando i fini della prova, il grafico di maggiore interesse è quello che mostra la potenza elettrica disponibile istante per istante prodotta dal pannello solare e l’energia elettrica disponibile nelle batterie in funzione del tempo.
5.2.4.1 Orbita alba-crepuscolo
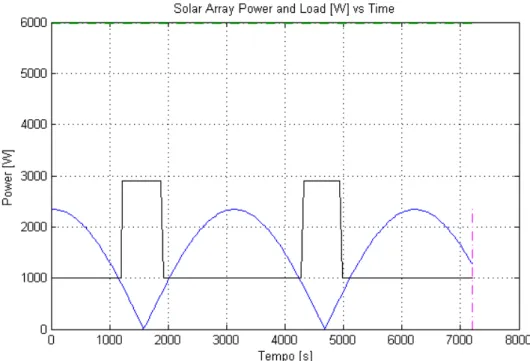
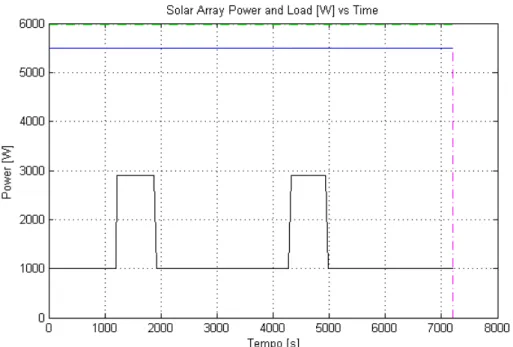
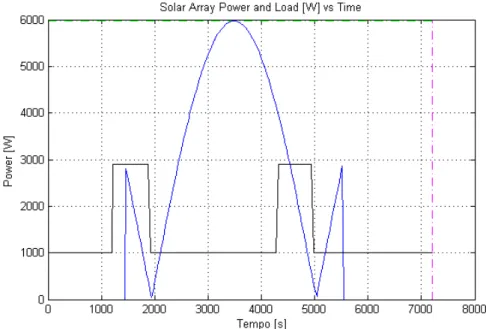
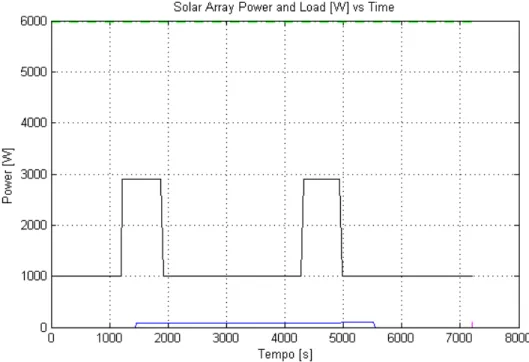
Di seguito sono riportati i grafici della potenza elettrica generata dal pannello solare per i 3 diversi casi C1, C2 e C3 descritti nel par.5.2.2; la linea nera rappresenta la potenza richiesta; la linea blu rappresenta la potenza generata dal pannello solare; la linea tratteggiata verde rappresenta la potenza massima ottenibile se il pannello solare fosse dotato di un meccanismo che lo puntasse istante per istante verso il Sole.
89
Figura 5-6 : potenza generata dal pannello solare con versore normale diretto lungo v per orbita 6-18
Figura 5-7 : potenza generata dal pannello solare con versore normale diretto lungo il Nadir per orbita 6-18
Figura 5-8 : potenza generata dal pannello solare con versore normale diretto fuori dal piano orbitale per orbita 6-18
Un satellite posto su orbita alba-crepuscolo non sperimenta eclissi, per cui il grafico dell’energia elettrica in funzione del tempo è costante ed uguale per i 3 casi (Figura 5-9) al valore massimo iniziale. La linea blu rappresenta il valore dell’energia e la linea tratteggiata rossa indica il livello di profondità di scarica ammesso.
91
Figura 5-9 : energia elettrica presente nelle batterie per orbita 6-18
5.2.4.2 Orbita mezzogiorno-mezzanotte
Il satellite posto su questo tipo di orbita sperimenta, per quanto detto in precedenza, un periodo di eclissi. Il valore dell’ascensione retta del nodo ascendente inserito ( = 100.17°) è tale da posizionare il satellite in condizioni di eclissi al tempo 0 e al termine del periodo simulato (7200s, pari a poco più del periodo orbitale). Durante le fasi di eclissi l’energia necessaria per la strumentazione di bordo e per le apparecchiature d’osservazione viene fornita dalle batterie. Anche per l’orbita 12-24 vengono distinti i 3 casi in base alla direzione del versore normale al pannello solare. Di seguito viene riportato il tipo di orbita e, per i tre casi C1, C2 e C3, i grafici della potenza e dell’energia.
Figura 5-10: orbita 12-24, vista 3D e x-y
Caso 1. Versore normale al pannello solare ( ) concorde con il vettore velocità.
93
Figura 5-12 : energia elettrica disponibile nelle batterie su orbita 12-24 caso 1
Caso 2. Versore normale al pannello solare ( ) diretto lungo la direzione del Nadir.
Figura 5-14 : energia elettrica disponibile nelle batterie su orbita 12-24 caso 2
Caso 3. Versore normale al pannello solare ( ) diretto ortogonalmente al piano orbitale.
95
Figura 5-16 : energia elettrica disponibile nelle batterie su orbita 12-24 caso 3
5.2.5 Conclusioni sulla prova 1
I grafici mostrano che la potenza elettrica generata e l’energia elettrica presente nelle batterie è sufficiente per le operazioni richieste dalla missione solo per alcune combinazioni posizione-disposizione satellite. Per il valore di quota e di inclinazione inserito, la situazione di ottimo risulta essere quella che posiziona il satellite su orbita 6-18 e versore nˆ ortogonale al pannello solare diretto fuori dal piano orbitale; la situazione da evitare è quella che vede il satellite su orbita 12-24 , fissato sempre nˆ diretto fuori dal piano orbitale: la potenza elettrica generata in questo caso non permette neanche l’uso delle apparecchiature di bordo per la sopravvivenza del satellite (sensori, scheda madre, telemetria e telecomando ecc.); durante la prima eclissi lo stato di carica della batteria raggiunge quasi il livello di profondità di scarica, e il grafico mostra che nelle ore di luce non c’è abbastanza potenza per caricarle.
al satellite e che permetta quindi di “seguire” il Sole al variare della loro posizione relativa.
5.3 Prova 2
5.3.1 Descrizione della prova
La seconda prova consiste nel simulare un trasferimento orbitale, riportato a titolo di esempio sull’articolo del Kechichian “Reformulation of Edelbaum’s Low Thrust Transfer Problem Using Optimal Control Theory” [2] [3] [4], applicando quindi l’algoritmo da egli stesso proposto. Il trasferimento orbitale proposto presenta, tra le ipotesi, una accelerazione continua sull’intera orbita, raggiungendo l’orbita finale esattamente in 191.26 giorni.
La prima parte della prova permette di confrontare il caso proposto con una missione che, per necessità, debba spegnere i propulsori in fase di eclissi. Lo scopo è quello di stabilire l’effetto della gestione del propulsore ai fini della missione in termine di tempo di trasferimento. Le due missioni confrontate rappresentano due missioni in cui si verificano due condizioni limite: la prima missione effettuata con propulsori sempre accesi rappresenta il caso ideale frutto di un processo analitico; la seconda missione invece rappresenta il caso estremamente cautelativo in cui i propulsori vengono spenti per ogni eclissi.
La seconda parte della prova consiste nel simulare una missione realistica, caso intermedio tra le due missioni simulate in precedenza, con valori di ingresso differenti da quelli riportati nell’articolo. La prova 2 si conclude con il confronto dei grafici ottenuti dalle simulazioni delle missioni eseguite con i 3 differenti approcci.
5.3.2 L’algoritmo del Kechichian
Nel suo articolo, Kechichian affronta il problema del trasferimento orbitale tra due orbite circolari non complanari, rendendolo un problema di minimo
97
tempo di trasferimento attraverso una legge di variazione dell’angolo (componente fuori dal piano del vettore di spinta)4. Dati:
, semiasse maggiore dell’orbita iniziale; , semiasse maggiore dell’orbita finale; , variazione di inclinazione totale desiderata;
= 398601.3 ( costante gravitazionale della Terra); , accelerazione costante per trasferimento bassa spinta.
L’algoritmo si traduce nei seguenti passi:
1. Calcolo di e di dalle seguenti formule:
=
;=
5.22. Calcolo di dalla seguente formula:
tan
=
5.3Dove V al primo passo vale proprio .
3. Calcolo del :
= 5.4
4. Il tempo di trasferimento t è dato da:
=
5.5( ) = tan
5.6( ) = 2 + 5.7
( ) =
= +
5.8= tan
+
5.9Il simulatore VM-Orbit, seguendo l’algoritmo sopra riportato, calcola il valore di ( ) ; mentre si affida al propagatore D-Orbit per i valori degli altri parametri orbitali (a ed i). La strategia di sparo descritta nell’articolo prevede un cambio di direzione del verso di ad ogni antinodo: in questo modo la componente dell’accelerazione normale al piano orbitale ha effetto nullo sulla singola orbita.
Figura 5-17 : vettore spinta e sue componenti sul piano e fuori dal piano orbitale
La strategia di sparo descritta nell’articolo prevede un cambio di direzione del verso di ad ogni antinodo: in questo modo la componente dell’accelerazione normale al piano orbitale ha effetto nullo sulla singola orbita.
99
5.3.3 Missione ideale: approccio analitico
L’esempio di trasferimento proposto dal Kechichian e preso in considerazione per la presente prova consiste in un trasferimento orbitale con le seguenti caratteristiche:
= 7000km; = 42166km;
= 28.5° ; = 0° ; = 28.5° ; = 0.00035 .
Il simulatore VM-Orbit, seguendo l’algoritmo sopra riportato, calcola il valore di ( ) ; mentre si affida al propagatore D-Orbit per il calcolo dei valori degli altri parametri orbitali (a ed i). I valori calcolati per l’angolo e per il tempo di trasferimento t sono:
= 21.985°
= 191.26 = 16528320
Di seguito vengono riportati i grafici di: semiasse maggiore, dell’inclinazione, della velocità e dell’angolo .
Figura 5-18 : andamento del semiasse maggiore per l'esempio del Kechichian
101
Figura 5-20 : andamento dell'inclinazione i per l'esempio del Kechichian
5.3.4 Missione con approccio cautelativo
Lo stesso esempio del paragrafo precedente è stato simulato al VM-Orbit imponendo un comando al sistema di propulsione, ovvero lo stato del propulsore viene commutato su spento quando lo S/C si trova in eclissi. L’effetto principale di tale comando è quello di ritardare il raggiungimento dell’orbita finale. Un confronto tra le due missioni, prendendo come riferimento il tempo previsto per eseguire con sparo continuo (191,26giorni), mostra che lo S/C si trova, nel caso di comando imposto, al 59% della sua missione, in termini di semiasse maggiore, come evidente dalla figura seguente.
Figura 5-21 : andamento del semiasse maggiore con comando imposto al propulsore
La figura seguente mostra il valore raggiunto dopo 191,26giorni e mostra anche i segmenti in cui non si ha aumento del semiasse maggiore in quanto il veicolo si trova in eclissi e quindi il propulsore non è in funzione.
Figura 5-22 : ingrandimento dell'andamento del semiasse maggiore nell'intorno della data di fine missione (durata missione: 16524864s)
103
5.3.5 Missione realistica
La missione realistica ha caratteristiche simili a quelle precedentemente simulate (inclinazione iniziale e raggio dell’orbita iniziale) ma a differenza delle precedenti, essa differisce per i valori di:
inclinazione finale: = 27.5°
raggio orbita circolare finale: = 80000km
5.3.5.1 Scelta dell’accelerazione
La strategia imposta dall’algoritmo del Kechichian prevede accelerazione costante: il consumo di propellente implica una riduzione di / e quindi, dovendo essere il rapporto spinta/massa costante, l’andamento della spinta T nel tempo sarà decrescente. Si suppone che il propulsore installato a bordo del satellite sia il propulsore a effetto Hall ALTA HT-100.
Propulsore ALTA HT-100
Nominale Massimo Minimo
Spinta [mN] 4.5 10 3.5
[s] > 950 > 1000 > 750
[-] 0.22 0.29 0.21
Potenza [W] 100 160 60
Figura 5-23 : propulsore ALTA HT-100
Si fanno le seguenti ipotesi sull’utilizzo del propulsore: Il valore iniziale della spinta è quella massima:
(0) = 10 ;
Il rendimento di spinta rimane costante al diminuire della spinta: = 0.29 ;
L’impulso specifico rimane costante al diminuire della spinta: = 1000
La potenza richiesta all’istante iniziale dal propulsore e calcolata dal simulatore è circa 169W, in accordo con il valore indicativo riportato in Tabella 5-1. Fissato il valore della massa dello S/C a inizio simulazione ( / (0) = 300 ), il valore dell’accelerazione inserito è uguale al valore che l’accelerazione assume all’istante iniziale.
=
( )105
5.3.5.2 Dati della missione
Di seguito vengono riportati i valori delle varie grandezze inserite per poter effettuare la simulazione:
= 7000km; = 8000km; = 28.5° ; = 27.5° ; = 1 ; = 0.000015 / (0) = 300 = 3 = 60 = 86400
L’algoritmo fornisce, in base ai dati inseriti: (0) = 21.548°;
= 182.95
La scelta di simulare solo 1 giorno di missione è dettata dalla considerazione che è di interesse la disponibilità di energia a bordo (sia essa generata istantaneamente dai pannelli solari o immagazzinata nella batteria) e quindi l’attenzione sarà posta sull’andamento del grafico dell’energia presente nelle batterie (fonte limitata di energia).
5.3.5.3 Caratteristiche della missione
Si suppone che la missione abbia come fine l’osservazione della Terra non continua ma a tratti, corrispondenti a due archi ( [ , ] e [ , ]) di traiettoria, limitati da valori di anomalia vera . All’interno dei due archi si attivano le strumentazioni necessarie all’osservazione. L’osservazione viene effttuata da quote diverse, tra 620km a 1620km e con una variazione di 1° dell’inclinazione, da 28.5° a 27.5°. Fissato un livello di energia sotto il
DOD, il simulatore confronta il livello attuale di energia ( ) presente nelle batterie con il valore fissato, e valuta se sia necessario intervenire sul sistema propulsivo. Lo schema seguente (Figura 5-24) mostra la logica di gestione dei sottosistemi per il caso in esame.
Figura 5-24 : logica della gestione del sottosistema propulsivo imponendo un valore minimo ammissibile (pari al 90% del livello massimo di energia) all’energia elettrica disponibile nelle batterie.
5.3.6 Grafici della simulazione per i 3 approcci
Si riportano di seguito i grafici dell’andamento dell’energia immagazzinata nelle batterie [Wh] e della potenza [W] disponibile a bordo: grafici relativi alle 3 missioni simulate.
Legenda per il grafico dell’energia:
la linea azzurra indica il livello di energia a bordo;
107
la linea tratto e punto verticale indica l’istante di fine simulazione; le linea continua e alternata è un indicatore di eclissi: assume valore 0 quando il veicolo è in vista e valore 2 quando è in eclissi.
Legenda per il grafico della potenza:
la linea azzurra indica il livello di potenza generata; la linea nera indica la potenza totale richiesta.
5.3.6.1 Grafico dell’energia
Figura 5-26 : energia presente nelle batterie per l'approccio cautelativo
109
5.3.6.2 Grafico della potenza
Figura 5-30 : potenza generata nel caso di approccio realistico
5.3.7 Conclusioni
La Figura 5-25 evidenzia l’andamento decrescente dell’energia durante il primo giorno di missione. La disposizione del pannello, con versore diretto lungo il vettore velocità, è tale che l’andamento della potenza è quella mostrata in Figura 5-28 con linea azzurra: essa non è sufficiente a garantire l’energia richiesta durante le ore di luce e a ricaricare la batteria nei periodi eclissi. La missione effettuata secondo l’approccio analitico proposto dal Kechichian nel suo articolo non è quindi realizzabile.
L’approccio cautelativo può essere considerato una forma di gestione “passiva” in quanto si interviene sul sottosistema propulsivo senza alcuna valutazione della effettiva necessità di cambiare lo stato del sottosistema. La Figura 5-26 mostra l’andamento ciclico del livello di energia garantendo anche un certo margine rispetto alla DOD. E’ evidente dalla Figura 5-29 l’andamento regolare e ciclico della potenza richiesta.
111
Il controllo diretto del livello di energia elettrica durante le condizioni di vista o di eclissi, e quindi un tipo di gestione “attiva” del sottosistema propulsivo, permette di realizzare la missione senza intervenire in fase progettuale sulla disposizione dei pannelli solari o sul valore dell’area dei pannelli solari. Lo scopo della missione prevede anche il raggiungimento di una orbita finale circolare con un incremento di 1000km del semiasse maggiore e una riduzione di 1° dell’inclinazione rispetto all’orbita iniziale. Un confronto tra le Figura 5-31 e Figura 5-32 evidenzia come una gestione “attiva” del sottosistema propulsivo implica un ritardo rispetto ai valori previsti dalla missione ideale: in termini di semiasse maggiore, tale ritardo è stimabile in circa 1.3km nel primo giorno di simulazione. La missione si svolge in 182.95giorni, quindi l’accumulo di ritardo può comportare un fallimento della missione qualora ci fossero dei vincoli di tempo imposti.